Настоящее изобретение относится к устройству в соответствии с преамбулой по п.1.
Такие устройства предназначены для перемещения стеклянного изделия, в частности полого стеклянного изделия, извлеченного из выдувной формы стеклоформующей машины и размещенного на стационарном приемном столе, на ленту конвейера, непрерывно перемещающуюся с равномерной скоростью, при помощи толкателя. Стеклянное изделие должно располагаться на ленте конвейера в положениях одно за другим для последовательного ввода в лер. Поскольку в случае (секционных) машин I.S. лента конвейера взаимодействует с множеством производственных участков, причем каждый из которых оснащен приемным столом, процесс выталкивания стеклянных изделий должен происходить в течение временного интервала, зависящего от рабочего цикла остальных производственных участков и от скорости перемещения ленты, причем процесс выталкивания также должен осуществляться таким образом, что опрокидывание стеклянных изделий или их повреждение должно быть предотвращено, как, например, возможно происходит при неточном расположении на ленте. В конце перемещения вдоль кривой перемещения каждое стеклянное изделие должно располагаться в определенном положении на ленте и перемещаться с ней в одном и том же направлении и с одной и той же скоростью.
Документ DE 102004010238 B3 раскрывает устройство этого типа, в котором первый рычаг, который на одном из своих концов может поворачиваться вокруг вертикальной, позиционно закрепленной оси, поддерживает на своем другом конце один конец второго рычага, который может поворачиваться вокруг вертикальной оси, причем другой конец второго рычага содержит толкатель, установленный на нем, причем упомянутый толкатель в свою очередь способен поворачиваться вокруг перпендикулярной оси и устанавливается с тремя толкающими пальцами. Три позиционно закрепленных привода расположены для вращений первого рычага вокруг позиционно закрепленной оси, второго рычага относительно первого рычага и толкателя относительно второго рычага, которые могут управляться взаимно независимым способом, причем кривая перемещения, начинающаяся в точке приема на приемном столе и заканчивающаяся в точке подачи на ленту конвейера, может быть получена посредством совмещения трех частичных перемещений, созданных приводами. Передача вращательных движений трех приводов через рычаги толкателю осуществляется при помощи зубчатых ременных передач, работа которых требует большого технического обслуживания. Она сопровождается относительно большими затратами, которые определяются начальным сочетанием задающих движений трех неподвижно расположенных приводов через полые валы, направленные один внутри другого, и последовательным разделением этих движений для их передачи соответствующему элементу, вращательное движение которого должно регулироваться.
Документ DE 102008027911 A1 раскрывает другое сравнимое устройство, в котором толкатель неподвижно соединен с концом плеча кривошипа, которое соединено с валом при закреплении с возможностью вращения, причем упомянутый вал установлен при вращении на вращающемся диске эксцентрично относительно своей позиционно закрепленной оси, проходящей параллельно упомянутому валу. Упомянутый вал образует приводной вал первого электродвигателя, также поддерживаемого вращающимся диском, причем вращающийся диск соединен с возможностью приведения в движение непосредственно со вторым, позиционно закрепленным электродвигателем. На самом деле данное исполнение упрощает элементы зубчатой передачи, необходимые для передачи частичных перемещений двух электродвигателей, причем, однако, в сравнении с устройством, известным из документа DE 1020004010238 B3, существует несколько возможных вариантов исполнения для образования кривой перемещения, поскольку только два частичных перемещения должны совмещаться, и толкатель не поворачивается относительно упомянутого плеча кривошипа.
И, наконец, EP 1886977 A1 раскрывает другое устройство для выталкивания стеклянных изделий на ленту конвейера, в котором два электродвигателя, расположенные на раме машины соосно относительно друг друга, неподвижно соединены с плечами кривошипа на соответствующих концах своих приводных валов, причем свободный конец плеча кривошипа шарнирно соединен с помощью соединения непосредственно на конструкции, поддерживающей толкатель, и причем свободный конец другого плеча кривошипа шарнирно соединен с помощью соединения с промежуточным рычагом, и он на своем конце, удаленном от плеча кривошипа, шарнирно соединен с другим соединением на упомянутой конструкции. Оси всех соединений проходят параллельно друг другу. Посредством управления двумя электродвигателями для вращения в одном и том же направлении можно обеспечить вращательное движение толкателя вокруг общей оси двух электродвигателей, причем посредством управления для вращения в одном и том же направлении можно перемещать толкатель ближе к приемному столу или дальше от него или ленты конвейера. Кривая перемещения, начинающаяся от приемного стола к ленте конвейера, является, таким образом, дугой окружности вокруг общей оси двух электродвигателей. Поскольку только два частичных перемещения должны совмещаться, существует также несколько возможных вариантов исполнения для кривой перемещения в случае данного устройства по сравнению с устройством, описанным в документе DE 1020004010238 B3.
Задачей настоящего изобретения является усовершенствование устройства типа, упомянутого во введении, простым способом за счет возможных вариантов исполнения для кривой перемещения, которая является оптимальной и, в частности, приспособленной к требованиям. Эта задача достигнута в случае такого устройства за счет признаков отличительной части по п.1.
Следовательно, важно для настоящего изобретения, чтобы из упомянутых трех электродвигателей только один был позиционно закреплен, причем остальные два, напротив, удерживаются на кронштейне, и чтобы вращаться с кронштейном, установленным при позиционном креплении, чтобы быть способным поворачиваться вокруг вертикальной оси. Последние два электродвигателя, таким образом, удерживаются эксцентрично относительно позиционно закрепленной оси. Что касается известного уровня техники, упомянутого во введении, в случае вариантов осуществления, в которых три позиционно закрепленных электродвигателя, которые могут управляться взаимно независимым способом, присутствуют для обеспечения трех частичных перемещений, в результате исключения элементов зубчатой передачи, которые используются для начального пространственного сочетания и для передачи частичных перемещений, достигнуты значительно уменьшенные затраты. Что касается известного уровня техники, в случае вариантов осуществления, в которых два электродвигателя, которые могут управляться взаимно независимым способом, присутствуют для обеспечения двух частичных перемещений, из которых один электродвигатель позиционно закреплен, обеспечено преимущество усовершенствованных возможных вариантов для получения и, в частности, изменения кривой перемещения. Меньшее количество частей, по сравнению с известными устройствами, содержащими три оси, которые необходимо регулировать, обеспечивает экономию при изготовлении, сборке и техническом обслуживании.
Признаки по п.2 относятся к эффективному созданию средства для поворота толкателя относительно плеча кривошипа, поддерживающего его. Цепь из четырех штанг, используемая в этом случае и включающая в себя толкающий стержень, может рассматриваться как требующая технического обслуживания и ремонта небольшого объема и являющаяся в целом надежной. Это особенно пригодно для использования согласно рабочим условиям стекольного завода.
Признаки по п.3 или 4 относятся к расположению и исполнению приемного элемента, соединенного с кронштейном и выполняющего функцию опоры для двух электродвигателей, перемещающихся с кронштейном. Одно из двух приемных гнезд продолжается в виде предпочтительно цилиндрической выступающей части, которая проходит соосно относительно приемного гнезда и в которой установлен кольцеобразный элемент, вмещающий точку шарнирного соединения упомянутого толкающего стержня, через полый вал. Крышка, от которой проходит полый вал на верхней стороне, образует верхний конец для приемного элемента. Выступающая часть предпочтительно выполнена как одно целое с крышкой. Кронштейн и приемный элемент могут также быть выполнены как одно целое друг с другом.
Приводное соединение между третьим электродвигателем и полым валом расположено через прямозубую цилиндрическую зубчатую передачу в соответствии с признаками по п.5. Это только передаточный механизм, который требуется с точки зрения передачи задающих движений трех электродвигателей.
Признаки по п.6 или 7 относятся к исполнению корпуса, который, по меньшей мере, частично вмещает электродвигатели и передаточные элементы, расположенные вниз по потоку от него. Этот корпус выполнен для закрытия и на верхней стороне отличается защитной пластиной, от которой выступает только выступающая часть, упомянутая во введении. Термин «вертикальный», используемый в предыдущих вариантах осуществления и в дальнейшем, относится к плоской стороне основания этого корпуса. Важно, чтобы все важные элементы устройства были расположены для защиты от внешних воздействий, возникающих в результате работы стекольного завода.
Признаки по пп.8-10 относятся к расположению позиционно закрепленного электродвигателя внутри корпуса. Он удерживается на раме, закрепленной на корпусе, и для опоры кронштейна обеспечен полый цилиндр, неподвижно соединенный с ним, при помощи которого кронштейн установлен на полой втулке, чтобы вращаться вокруг своей оси, причем приводной вал первого электродвигателя проходит внутри втулки. Таким образом, обеспечена устойчивая опора кронштейна, которая особенно пригодна для выдерживания нагрузок.
Дополнительная защита устройства от воздействий тепла, влаги, абразивного порошка и т.д. достигнута в соответствии с признаками по п.11 на основании того факта, что корпус расположен под плоскостью приемного стола.
Устройство в соответствии с настоящим изобретением, в котором в отличие от известного уровня техники, проиллюстрированного выше, немного вращательных движений управляется относительно друг друга, позволяет использовать устойчивые опорные подшипники, номинальные динамические нагрузки которых оказываются высокими, что означает, что должен ожидаться соответственно длительный срок службы.
Настоящее изобретение будет объяснено более подробно со ссылкой на представленные в качестве примера варианты осуществления, схематично показанные на чертежах, на которых:
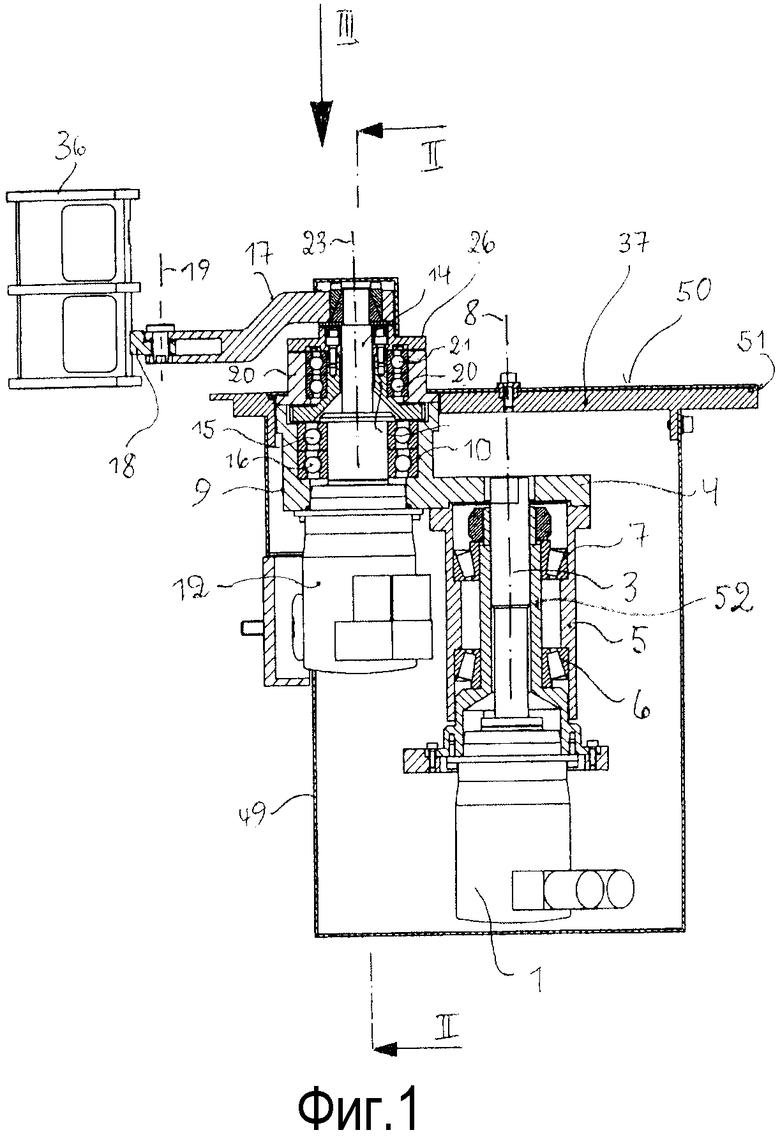
фиг.1 - вид в разрезе устройства в соответствии с настоящим изобретением;
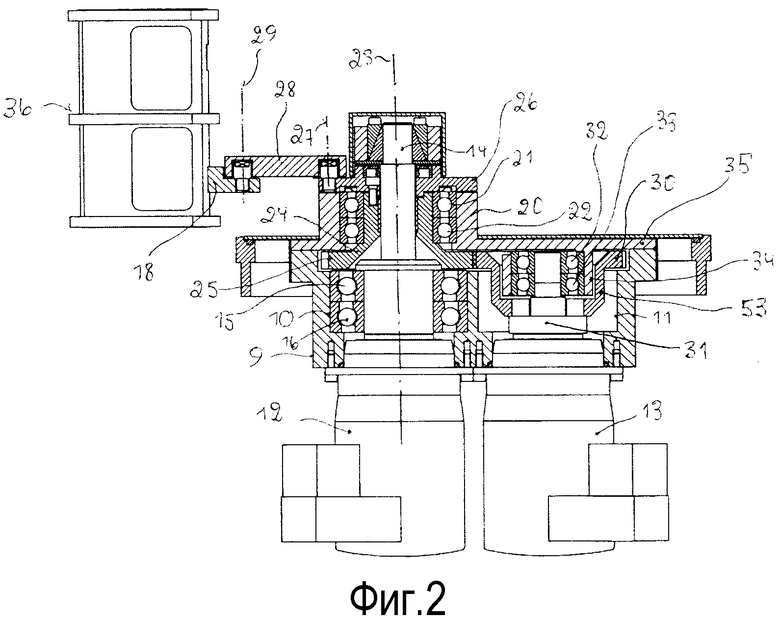
фиг.2 - частично смещенный под углом вид в разрезе устройства на фиг.1 по линии II-II;
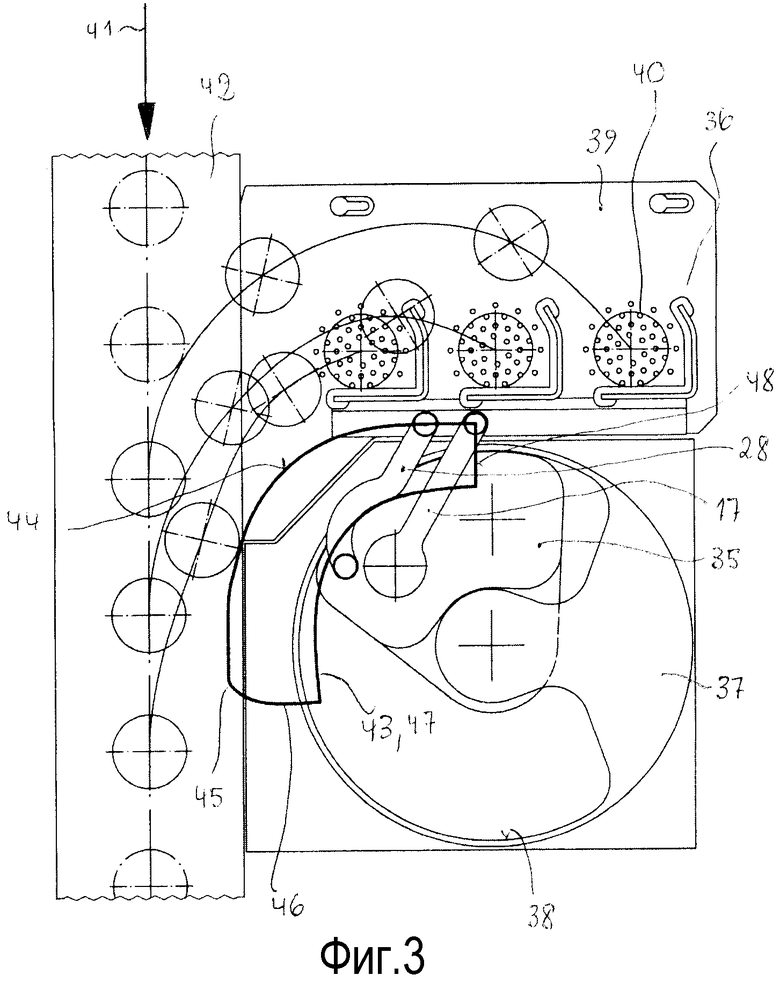
фиг.3 - вид сверху устройства вдоль направления III обзора на фиг.1;
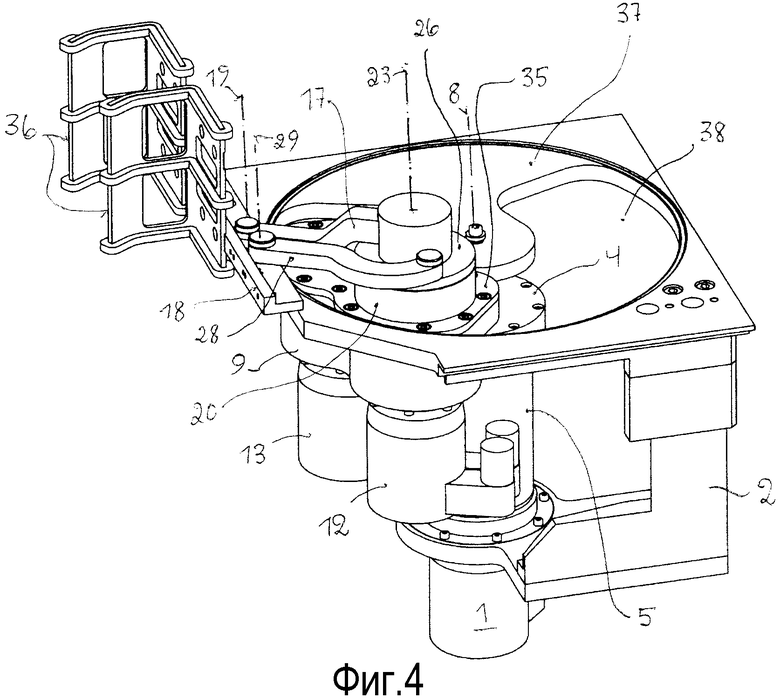
фиг.4 - перспективный вид сверху устройства на фиг.1.
Ссылочная позиция 1 обозначает первый электродвигатель, расположенный на раме 2 при позиционном креплении, приводной вал 3 которого соединен с кронштейном 4 при позиционном креплении. Приводной вал 3 проходит через полую втулку 52, и кронштейн 4 соединен с полым цилиндром 5, окружающим втулку 52, причем кронштейн установлен на втулке 52 через полый цилиндр при помощи роликовых подшипников 6, 7.
Кронштейн 4, который установлен таким образом, чтобы вращаться вокруг вертикальной, позиционно закрепленной оси 8, поддерживает на своем конце, удаленном от оси 8, приемный элемент 9, который, как показано на фиг.2, содержит два цилиндрических приемных гнезда 10, 11, которые расположены рядом друг с другом и оси которых проходят параллельно оси 8.
Второй электродвигатель 12 вставлен в нижний участок приемного гнезда 10, и третий электродвигатель 13 вставлен в нижний участок приемного гнезда 11.
Вал 14, установленный в приемном гнезде 10 посредством роликовых подшипников 15, 16, является приводным валом электродвигателя 12, и он соединен на своем верхнем конце с плечом 17 кривошипа при позиционном креплении, причем плечо кривошипа проходит, по существу, перпендикулярно относительно вала 14. Конец плеча 17 кривошипа соединен шарнирно с толкателем 18, чтобы поворачиваться вокруг перпендикулярной оси 19.
Цилиндрическая выступающая часть 20 закреплена на своей верхней стороне на приемном гнезде 10 и содержит первый полый вал 24, установленный в ней посредством роликовых подшипников 21, 22, причем полый вал проходит соосно относительно оси 23 приводного вала 14 и на своем нижнем конце поддерживает зубчатое кольцо 25. На своем верхнем конце полый вал 24 неподвижно соединен с кольцеобразным элементом 26, с которым один конец толкающего стержня 28 соединен с возможностью поворота вокруг оси 27, другой конец которого соединен с толкателем 18, чтобы поворачиваться вокруг оси 29 при размещении на расстоянии относительно оси 19.
Плечо 17 кривошипа образует вместе с толкающим стержнем 28 цепь из четырех штанг вследствие расположения осей 19, 23, 27, 29, что означает, что в зависимости от вращения полого вала 24 вокруг оси 23 может быть обеспечено вращение толкателя 18 вокруг оси 19 относительно плеча 17 кривошипа.
Зубчатое кольцо 25 зацеплено с зубчатым кольцом 30, которое выполнено как одно целое со вторым полым валом 53, соединенным с приводным валом 31 третьего электродвигателя 13 при закреплении с возможностью вращения и проходящим соосно относительно него. Приводной вал 31 электродвигателя 13 установлен с помощью роликовых подшипников 32, 33 в цилиндрической выступающей части 34, выступающей в приемный элемент 9 крышки 35, которая неподвижно соединена с выступающей частью 20. Два зубчатых кольца 25, 30 образуют только прямозубую цилиндрическую зубчатую передачу, используемую в зависимости от устройства.
Множество толкающих пальцев 36 закреплено на толкателе 18 с помощью способа, известного по сути, которые предназначены для выталкивания стеклянных изделий.
Как показано выше, первый электродвигатель 1 соединен с возможностью приведения в действие с приемным элементом 9 и, таким образом, выступающей частью 20, которая на своей верхней стороне выступает из выемки 38, образованной в крышке 37. Выступающая часть 20 расположена в выемке 38, форму которой можно видеть на фиг.3, таким образом, чтобы эксцентрично поворачиваться вокруг позиционно закрепленной оси 8, совершая возвратно-поступательное движение в этой выемке 38 при помощи электродвигателя 1.
Второй электродвигатель 12 соединен с возможностью приведения в действие с плечом 17 кривошипа, в частности, относительно создания вращательного движения точки шарнирного соединения, которая может определяться положением оси 19, на толкателе 18 относительно оси 23 приводного вала 14, который может перемещаться вместе с кронштейном 4.
Третий электродвигатель 13 соединен с возможностью приведения в действие посредством взаимно зацепленных зубчатых колец 25, 30 с кольцеобразным элементом 26 и, таким образом, с толкающим стержнем 28 для создания вращательного движения толкателя 18 относительно плеча 17 кривошипа вокруг оси 19.
Ссылочная позиция 49 обозначает корпус, в котором расположены электродвигатели 1, 12, 13 и части зубчатой передачи, упомянутые выше, и защищены от воздействий окружающей среды. Кроме того, обеспечена защитная пластина 50, которая образует верхний конец и содержит только одно отверстие, приспособленное для выступающей части 20. Защитная пластина 50 перемещается во время работы устройства вместе с выступающей частью 20 и соединена с корпусом 49 через уплотнение 51.
Пространство, ограниченное приемными гнездами 10, 11 и выступающей частью 20 и закрытое на верхней стороне крышкой 35 и кольцеобразным элементом 26, может заполняться маслом, поскольку это пространство закрыто на нижней стороне за счет обращенных к нему частей корпуса электродвигателей 1, 12, 13. Таким образом, может быть обеспечена система смазки, предназначенная для увеличения срока службы устройства.
Точки приложения нагрузки, которые подвергнуты большому количеству тепла, могут быть образованы в виде сухих скользящих подшипников, которые, как полагают, не требуют технического обслуживания и являются более простыми для замены, чем роликовые подшипники.
Для объяснения толкающего движения ниже сделана ссылка, в частности, на фиг.3.
Ссылочная позиция 39 обозначает приемный стол, на котором в качестве примера расположены три стеклянных изделия 40, которые должны выталкиваться, в расположении, проходящем перпендикулярно относительно направления 41, в котором проходит направление перемещения ленты 42 конвейера, перемещающейся с равномерной скоростью.
Посредством соответствующего управления электродвигателями 1, 12, 13 в данный момент создаются частичные перемещения, совмещение которых способно образовать замкнутую кривую 43, вдоль которой точки шарнирного соединения толкателя 18, которые могут быть определены положениями осей 19, 29, начиная с исходного положения, которое отличается толкающими пальцами 36, упирающимися торцом в неподвижные стеклянные изделия 40 на приемном столе 35 в первый раз, вдоль криволинейной траектории 44 до точки подачи 45, в которой толкающие пальцы 36 отцепляются от стеклянных изделий 40, в которой они перемещаются обратно приблизительно перпендикулярно относительно направления 41 перемещения вдоль участка 46, чтобы затем в свою очередь перемещаться обратно в исходное положение через криволинейную траекторию 47 и участок 48 для захвата другой группы стеклянных изделий 40.
В точке 45 подачи толкающие пальцы 36 перемещаются с той же скоростью, что и лента 42 конвейера. Совмещение упомянутых трех частичных перемещений может быть установлено таким образом, что кривая 43 заканчивается перед точкой 45 подачи по касательной в некоторой точке в направлении 41, что означает, что после нее толкающие пальцы 36 перемещаются вдоль линейного элемента траектории после упомянутой точки в том же направлении и с той же скоростью, что и лента 42 конвейера. Это обеспечивает равномерное перемещение, предотвращающее стеклянные изделия от перевертывания и также от неточного расположения на ленте 42 конвейера.
Кроме того, кривая 43 выполнена с условием, что стеклянные изделия 40 располагаются на ленте 42 конвейера одно за другим в направлении 41.
Время, необходимое для перемещения по кривой 43, таким образом, определяет рабочий цикл устройства.
Список ссылочных позиций
1 - электродвигатель
2 - рама
3 - приводной вал
4 - кронштейн
5 - полый цилиндр
6 - роликовый подшипник
7 - роликовый подшипник
8 - ось
9 - приемный элемент
10 - приемное гнездо
11 - приемное гнездо
12 - электродвигатель
13 - электродвигатель
14 - вал
15 - роликовый подшипник
16 - роликовый подшипник
17 - плечо кривошипа
18 - толкатель
19 - ось
20 - выступающая часть
21 - роликовый подшипник
22 - роликовый подшипник
23 - ось
24 - полый вал
25 - зубчатое кольцо
26 - кольцеобразный элемент
27 - ось
28 - толкающий стержень
29 - ось
30 - зубчатое кольцо
31 - приводной вал
32 - роликовый подшипник
33 - роликовый подшипник
34 - выступающая часть
35 - крышка
36 - толкающие пальцы
37 - крышка
38 - выемка
39 - приемный стол
40 - стеклянное изделие
41 - направление
42 - лента конвейера
43 - кривая
44 - траектория
45 - точка подачи
46 - участок
47 - траектория
48 - участок
49 - корпус
50 - защитная пластина
51 - уплотнение
52 - втулка
53 - полый вал
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТРАНСПОРТИРОВКИ ИЗДЕЛИЙ ИЗ ФИКСИРОВАННОГО ПОЛОЖЕНИЯ НА ДВИЖУЩИЙСЯ КОНВЕЙЕР | 2003 |
|
RU2330818C2 |
| Устройство для завертывания прямоугольных предметов | 1981 |
|
SU977287A1 |
| Устройство для автоматической сборки составных частей химических источников тока | 1991 |
|
SU1790016A1 |
| Толкатель для загрузки печи | 1977 |
|
SU737760A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ КОНДИТЕРСКИХ ПЛАСТОВ | 1994 |
|
RU2101957C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДВИГАНИЯ СТЕКЛЯННЫХ ПРЕДМЕТОВ НА ТРАНСПОРТЕРНУЮ ЛЕНТУ | 2011 |
|
RU2495835C1 |
| УСТРОЙСТВО ТРАНСПОРТИРОВАНИЯ ИЗДЕЛИЯ | 2007 |
|
RU2351524C1 |
| Захватное устройство для поддонов с зацепами | 1989 |
|
SU1726323A1 |
| Устройство для формирования слоя изделий | 1991 |
|
SU1828429A3 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОДНОВРЕМЕННОЙ ТРАНСПОРТИРОВКИ СОВОКУПНОСТИ ИЗДЕЛИЙ | 2003 |
|
RU2321554C2 |
Настоящее изобретение относится к устройству для выталкивания стеклянных изделий с приемного стола стеклоформующей машины на ленту конвейера. Техническим результатом изобретения является обеспечение оптимальной траектории перемещения толкателя. Устройство для выталкивания стеклянных изделий с приемного стола (39) секции секционной стеклоформующей машины на движущуюся ленту (42) конвейера посредством толкателя (18), который выполнен с возможностью выталкивания стеклянных изделий и установлен на одном конце рычага с возможностью поворота вокруг вертикальной оси (19). Причем другой конец рычага соединен с вертикально проходящим валом (14), который установлен с возможностью поворота вокруг вертикальной оси (23), при этом вал (14) расположен с возможностью эксцентричного поворота вокруг позиционно закрепленной, вертикально проходящей оси (8). Устройство содержит первый электродвигатель (1), выполненный с возможностью создания вращательного движения вала (14) вокруг оси (8), второй электродвигатель (12), выполненный с возможностью создания вращательного движения вала (14) вокруг оси (23), и третий электродвигатель (13), выполненный с возможностью создания вращательного движения толкателя (18) вокруг оси (19) относительно упомянутого рычага, при этом второй электродвигатель (12) и третий электродвигатель (13) удерживаются на кронштейне (4), установленном с возможностью вращения вокруг оси (8). Кронштейн (4) соединен с вертикально проходящим приводным валом (3) первого позиционно закрепленного электродвигателя (1) при закреплении с возможностью вращения, причем упомянутым рычагом является плечо (17) кривошипа, соединенное с валом (14) при закреплении с возможностью вращения. Один конец толкающего стержня (28) шарнирно соединен с толкателем (18) при расположении на расстоянии относительно оси (19) с возможностью поворота вокруг вертикальной оси (29), а другой конец толкающего стержня соединен с возможностью приведения в движение с третьим электродвигателем (13) через вертикальную ось (27) и образует цепь из четырех штанг с плечом (17) кривошипа и толкателем (18). Элемент (9) для вмещения, выполненный с двумя приемными гнездами (10, 11), неподвижно соединен с кронштейном (4), второй электродвигатель (12) и третий электродвигатель (13) удерживаются в приемных гнездах (10, 11) эксцентрически относительно оси (8), при этом элемент (9) для вмещения закрыт на верхней стороне крышкой (35). Выступающая часть (20), проходящая соосно относительно оси (23), выступает от крышки (35), а полый вал (24) установлен в выступающей части (20) с возможностью поворота вокруг оси (23) и соединен с кольцеобразным элементом (26), с которым обращенный к нему конец толкающего стержня (28) соединен шарнирно с возможностью поворота вокруг оси (27). 15 з.п. ф-лы, 4 ил.
1. Устройство для выталкивания стеклянных изделий с приемного стола (39) секции секционной стеклоформующей машины I.S. (отдельная секция) на ленту (42) конвейера, перемещающуюся в направлении (41), посредством толкателя (18), который выполнен с возможностью выталкивания стеклянных изделий и установлен на одном конце рычага с возможностью поворота вокруг вертикальной оси (19), причем другой конец рычага соединен с вертикально проходящим валом (14), который установлен с возможностью поворота вокруг вертикальной оси (23), причем вал (14) расположен с возможностью эксцентричного поворота вокруг позиционно закрепленной, вертикально проходящей оси (18), содержащее первый электродвигатель (1), выполненный с возможностью создания вращательного движения вала (14) вокруг оси (8), второй электродвигатель (12), выполненный с возможностью создания вращательного движения вала (14) вокруг оси (23), и третий электродвигатель (13), выполненный с возможностью создания вращательного движения толкателя (18) вокруг оси (19) относительно упомянутого рычага, отличающееся тем, что второй электродвигатель (12) и третий электродвигатель (13) удерживаются на кронштейне (4), установленном с возможностью вращения вокруг оси (8), кронштейн (4) соединен с вертикально проходящим приводным валом (3) первого позиционно закрепленного электродвигателя (1) при закреплении с возможностью вращения, упомянутым рычагом является плечо (17) кривошипа, соединенное с валом (14) при закреплении с возможностью вращения, один конец толкающего стержня (28) шарнирно соединен с толкателем (18) при расположении на расстоянии относительно оси (19) с возможностью поворота вокруг вертикальной оси (29), причем другой конец толкающего стержня соединен с возможностью приведения в движение с третьим электродвигателем (13) через вертикальную ось (27) и образует цепь из четырех штанг с плечом (17) кривошипа и толкателем (18), элемент (9) для вмещения, выполненный с двумя приемными гнездами (10, 11), неподвижно соединен с кронштейном (4), второй электродвигатель (13) и третий электродвигатель (13) удерживаются в приемных гнездах (10, 11) эксцентрически относительно оси (8), элемент (9) для вмещения закрыт на верхней стороне крышкой (35), выступающая часть (20), проходящая соосно относительно оси (23), выступает от крышки (35), полый вал (24) установлен в выступающей части (20) с возможностью поворота вокруг оси (23) и соединен с кольцеобразным элементом (26), с которым обращенный к нему конец толкающего стержня (28) соединен шарнирно с возможностью поворота вокруг оси (27).
2. Устройство по п.1, отличающееся тем, что полый вал (24) соединен с возможностью приведения в движение с третьим электродвигателем (13) через прямозубую цилиндрическую зубчатую передачу.
3. Устройство по п.1 или 2, отличающееся тем, что корпус (49) вмещает, по меньшей мере, электродвигатели (1, 12, 13) и содержит на верхней стороне крышку (37), выполненную с выемкой (38), причем размеры и положение выемки (38) приспособлены для вращения при возвратно-поступательном движении во время рабочего цикла устройства выступающей части (20) вокруг оси (8).
4. Устройство по п.3, отличающееся тем, что защитная пластина (50), расположенная на крышке (37), содержит отверстие для уплотнения сквозного отверстия выступающей части (20) и направлена к стороне кромки при уплотнении при вставке в крышку (37) для вращения с выступающей частью (20) вокруг оси (8).
5. Устройство по п.3, отличающееся тем, что электродвигатель (1) удерживается на раме (2), закрепленной на корпусе.
6. Устройство по п.4, отличающееся тем, что электродвигатель (1) удерживается на раме (2), закрепленной на корпусе.
7. Устройство по п.1, отличающееся тем, что перпендикулярно проходящий полый цилиндр (5) расположен на кронштейне (4), причем кронштейн (4) установлен на полом цилиндре с возможностью вращения вокруг оси (8).
8. Устройство по п.2, отличающееся тем, что перпендикулярно проходящий полый цилиндр (5) расположен на кронштейне (4), причем кронштейн (4) установлен на полом цилиндре с возможностью вращения вокруг оси (8).
9. Устройство по п.3, отличающееся тем, что перпендикулярно проходящий полый цилиндр (5) расположен на кронштейне (4), причем кронштейн (4) установлен на полом цилиндре с возможностью вращения вокруг оси (8).
10. Устройство по п.4, отличающееся тем, что перпендикулярно проходящий полый цилиндр (5) расположен на кронштейне (4), причем кронштейн (4) установлен на полом цилиндре с возможностью вращения вокруг оси (8).
11. Устройство по п.7, отличающееся тем, что полая втулка (52), на которой установлен полый цилиндр (5), установлена с возможностью вращения вокруг оси (8), и в которой проходит приводной вал (3) первого электродвигателя (1).
12. Устройство по п.3, отличающееся тем, что корпус (49) расположен под плоскостью приемного стола (39).
13. Устройство по п.4, отличающееся тем, что корпус (49) расположен под плоскостью приемного стола (39).
14. Устройство по п.5, отличающееся тем, что корпус (49) расположен под плоскостью приемного стола (39).
15. Устройство по п.6, отличающееся тем, что корпус (49) расположен под плоскостью приемного стола (39).
16. Устройство по п.11, отличающееся тем, что корпус (49) расположен под плоскостью приемного стола (39).
| ВЫТАЛКИВАЮЩЕЕ УСТРОЙСТВО ДЛЯ СЕКЦИОННОЙ СТЕКЛОФОРМОВОЧНОЙ МАШИНЫ | 2001 |
|
RU2241687C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ СЕКЦИОННОЙ МАШИНЫ | 2005 |
|
RU2384529C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПНЕВМАТИЧЕСКОЙ МАШИНЫ ДЛЯ МАШИНЫ СЕКЦИОННОГО ТИПА | 2000 |
|
RU2237026C2 |
| DE 102008027911 A1, 17.12.2009 | |||
| EP 1886977 A1, 13.02.2008 | |||

