Изобретение относится к области механических измерений, в частности к измерению углового ускорения, применительно к стендам для определения моментов инерции тел.
В настоящее время силами специалистов ЦАГИ разработаны стенды для измерения массы, координат центра масс и моментов инерции изделий машиностроения различного назначения (Богданов В.В., Веселов Н.В., Панченко И.Н. и др. Стенд для измерения массы, координат центра масс и тензора инерции изделия. // Датчики и системы, 2010, №6, с. 24-28), (Богданов В.В., Веселов Н.В., Панченко И.Н. и др. // Патент 2358880 РФ, Стенд для измерения массы, координат центра масс и тензора инерции изделия), (Богданов В.В., Панченко И.Н., Някк В.А., Чумаченко Е.К. // Патент 2434213 РФ, Стенд для измерения массы, координат центра масс и тензора инерции изделия), (Богданов В.В., Панченко И.Н. К теории измерения массы, координат центра масс и моментов инерции тел.// Датчики и системы, 2013, №8, с. 12-15), (Богданов В.В., Панченко И.Н., Чумаченко Е.К. Цифровая обработка сигналов и результаты тестирования стенда. // Датчики и системы, 2010, №5, с. 29-33).
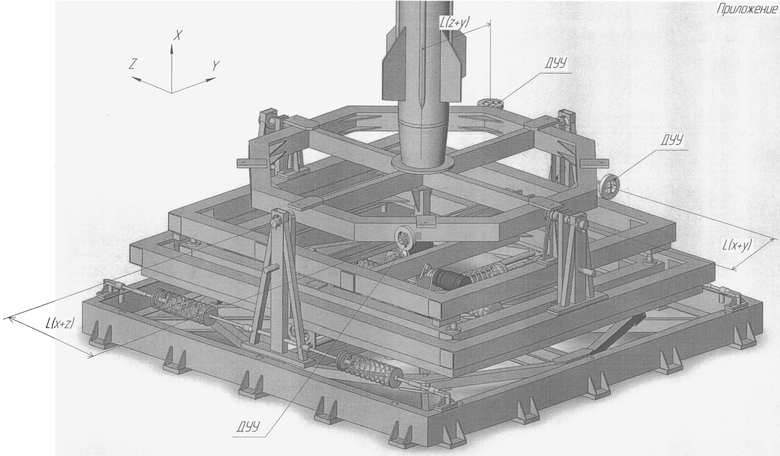
При измерении моментов инерции изделию задают угловые колебания вокруг неподвижных осей стенда. По параметрам, полученным от датчиков момента и датчиков угловых ускорений, вычисляют моменты инерции изделий. На практике из-за компоновки изделия на стенде не удается расположить датчики угловых ускорений на осях, вокруг которых происходит колебания, и их устанавливают на некотором расстоянии L от оси вращения (см. приложение), тогда датчик, кроме углового ускорения, испытывает и линейное ускорение. Для измерения углового ускорения разработан датчик углового ускорения (ДУУ), позволяющий с высокой точностью селектировать сигналы углового ускорения из смеси линейного и углового ускорений, одновременно действующих на датчик.
Применяемые на стендах ДУУ периодически калибруют.
Известен способ воспроизведения и передачи рабочим средствам измерения (в том числе датчикам) размера единицы постоянного углового ускорения (см. Государственный первичный эталон и общесоюзная поверочная схема для средств измерений постоянного углового ускорения в диапазоне  , ГОСТ 8.289-78). В качестве образцовых средств измерений применяют образцовые меры, работающие на принципах: падающего в аэростатическом подвесе винта, блока с падающим грузом, управляемых электродвигателей. Образцовые средства измерений применяют для проверки рабочих угловых акселерометров методом прямых измерений. В качестве рабочих средств измерений применяют угловые акселерометры, допускаемые относительные погрешности которых доходят 15%.
, ГОСТ 8.289-78). В качестве образцовых средств измерений применяют образцовые меры, работающие на принципах: падающего в аэростатическом подвесе винта, блока с падающим грузом, управляемых электродвигателей. Образцовые средства измерений применяют для проверки рабочих угловых акселерометров методом прямых измерений. В качестве рабочих средств измерений применяют угловые акселерометры, допускаемые относительные погрешности которых доходят 15%.
Недостаток указанных способов для калибровки ДУУ заключается в следующем. В системе стенда для определения моментов инерции ДУУ измеряют переменное угловое ускорение на некоторой фиксированной частоте колебаний ƒ0. Калибровка датчика на постоянном угловом ускорении не позволяет учесть динамическую погрешность датчика, возникающую при измерении переменного ускорения. Кроме того, остается открытым вопрос о влиянии линейного ускорения на показания датчика.
Наиболее близким к предлагаемому решению является способ калибровки датчика переменного углового ускорения, используемый при измерении динамических моментов в электроприводах (см. Соколов М.М., Масандилов Л.Б. Измерение динамических моментов в электроприводах переменного тока, стр. 154…156 // Издательство «Энергия», Москва. 1975 г.)
Датчик углового ускорения устанавливают на вал электродвигателя, при этом совмещают ось ДУУ с осью вращения вала электродвигателя и на валу устанавливают штатный датчик угловой скорости ω0. ДУУ подвергают действию известного углового ускорения и путем обработки выходного сигнала ДУУ находят коэффициент преобразования углового ускорения в электрический сигнал.
Выходной сигнал датчика углового ускорения:

где: k - коэффициент преобразования углового ускорения в электрический сигнал;
 - мгновенное значение углового ускорения.
- мгновенное значение углового ускорения.
Электропривод разгоняют, на вал действует угловое ускорение и угловая скорость растет.
Для определенного интервала кривой разгона записывают интеграл от левой и правой частей формулы (1):

где: t1 и t2- границы интервала кривой углового ускорения;
ω1 и ω2 - границы интервала кривой угловой скорости.
Откуда: 
где:  - площадь под кривой сигнала датчика ускорения на интервале времени с границами t1 и t2.
- площадь под кривой сигнала датчика ускорения на интервале времени с границами t1 и t2.
Δω - интервал угловых скоростей с границами ω1 и ω2.
Основной недостаток данного способа калибровки ДУУ заключается в том, что он не пригоден для знакопеременных ускорений. Если ускорение изменяется по периодическому закону, что имеет место на стендах, измеряющих моменты инерции, интегралы (2) обращаются в ноль, либо имеют слишком малую величину, непригодную для дальнейшей обработки. Кроме того, указанный способ не позволяет производить калибровку датчика при одновременном действии углового и линейного ускорений.
Задачей данного изобретения является предложение способа калибровки, при котором датчик первоначально подвергают действию только углового ускорения (без действия линейного ускорения), а затем действию такого же углового ускорения и линейного ускорения одновременно.
Техническим результатом предлагаемого способа является повышение точности калибровки ДУУ в условиях, максимально приближенных к условиям его работы на стенде для измерения моментов инерции, определение коэффициента преобразования углового ускорения в выходной сигнал датчика и определение влияния вектора линейного ускорения на этот коэффициент.
Технический результат достигается тем, что в способе калибровки датчика углового ускорения его (датчик углового ускорения) устанавливают на вал, подвергают его действию известного углового ускорения и путем обработки выходного сигнала датчика находят коэффициент преобразования углового ускорения в электрический сигнал, при этом датчик углового ускорения устанавливают на маятнике, его ось совмещают с осью вращения маятника, а ось динамического аналога датчика - с точкой маятника, отстоящей от его оси вращения на заданном расстоянии, маятник отклоняют на допустимый по условию изохронности угол φ(t=0)≤8° и отпускают, производят дискретные отсчеты сигналов датчика угла α(n) и углового ускорения  , по дискретным отсчетам сигнала датчика угла рассчитывают коэффициенты цифрового режекторного фильтра, которые используют для определения собственной круговой частоты колебаний маятника:
, по дискретным отсчетам сигнала датчика угла рассчитывают коэффициенты цифрового режекторного фильтра, которые используют для определения собственной круговой частоты колебаний маятника:
 ,
,
где: ω1 - собственная круговая частота колебаний маятника;
 - угол поворота собственного вектора характеристического уравнения;
- угол поворота собственного вектора характеристического уравнения;
а1 и а2 - коэффициенты цифрового фильтра;
 - оптимальное целое число шагов задержки сигнала в цифровом фильтре;
- оптимальное целое число шагов задержки сигнала в цифровом фильтре;
 - частота дискретизации сигнала;
- частота дискретизации сигнала;
 - коэффициент затухания колебаний;
- коэффициент затухания колебаний;
по дискретным отсчетам сигналов датчиков угла и углового ускорения рассчитывают коэффициент преобразования углового ускорения в выходной электрический сигнал датчика:
 ,
,
где: s - коэффициент преобразования, размерностью  ;
;
 - собственная недемпфированная частота колебаний; при этом на величину коэффициента затухания колебаний маятника накладывают ограничение: β≤0,01, после чего датчик углового ускорения и динамический аналог датчика меняют местами и снова определяют коэффициент преобразования датчика в условиях действия на него углового ускорения и вектора линейного ускорения.
- собственная недемпфированная частота колебаний; при этом на величину коэффициента затухания колебаний маятника накладывают ограничение: β≤0,01, после чего датчик углового ускорения и динамический аналог датчика меняют местами и снова определяют коэффициент преобразования датчика в условиях действия на него углового ускорения и вектора линейного ускорения.
Для более подробного пояснения предлагаемого изобретения рассмотрим схему стенда, его конструкцию и принцип действия.
На фиг. 1 показана аксонометрическая проекция стенда для калибровки ДУУ;
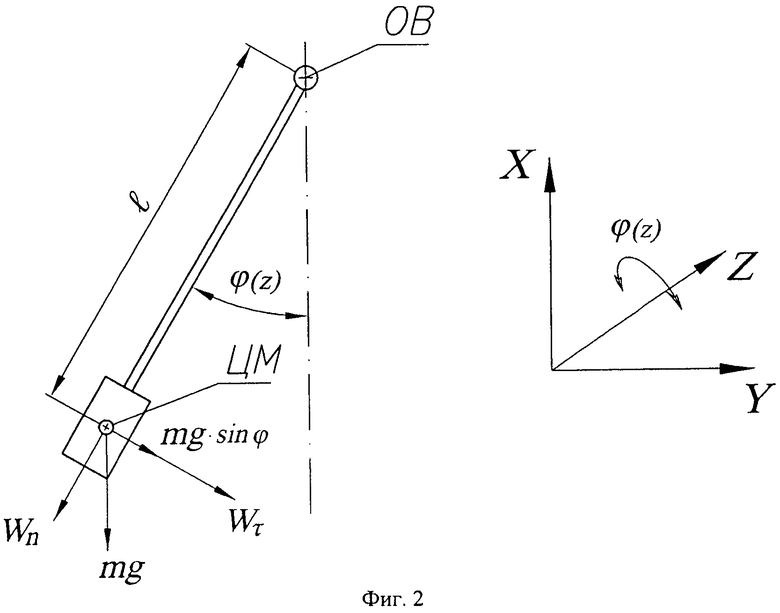
На фиг. 2 показаны векторы ускорений, действующие на маятник;
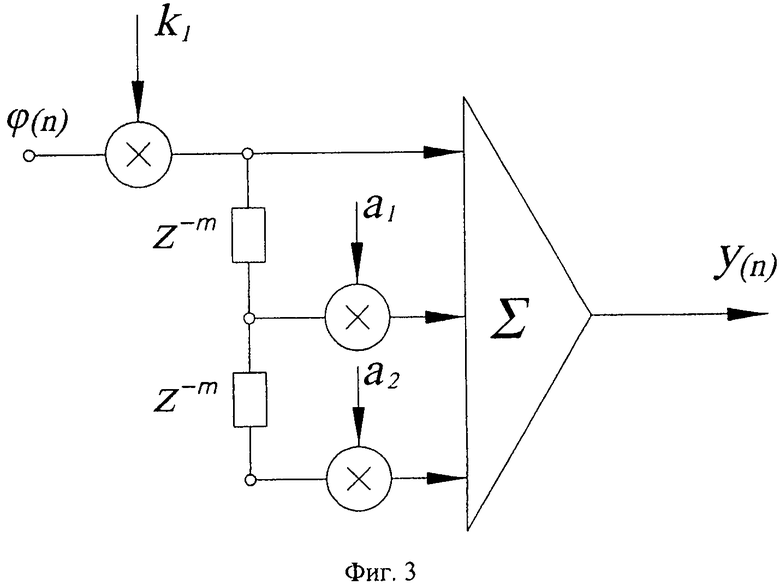
На фиг. 3 приведена структурная схема режекторного (нерекурсивного) цифрового фильтра.
Стенд (см. фиг. 1) состоит из станины 1, на которой закреплен узел поворота 2, на его валу с одной стороны установлен датчик угла 3, а на другой - стержень 4, к которому закреплен груз 5. Стержень и груз образуют маятник. На стержне 4 устанавливают ДУУ 6 и динамический аналог датчика (ДАД) 7, имеющий такие же, как у ДУУ, массу, момент инерции и угловую жесткость. Если на оси вращения устанавливают ДУУ 6, то на расстоянии L от оси вращения закрепляют ДАД 7, причем ось ДУУ 6 совмещают с осью вращения маятника, а ось ДАД 7 - с точкой маятника, отстоящей от оси вращения на заданное расстояние. При установке ДУУ 6 на расстоянии L, на оси вращения устанавливают ДАД 7. Перемещением груза 5 по стержню 4 подбирают необходимую частоту колебаний маятника. ДУУ 6 подвергают действию известного углового ускорения путем колебательных движений маятника. Маятник отклоняют на допустимый по условию изохронности угол φ(t=0)≅8° (см. фиг. 2) от положения равновесия и отпускают.
Производят дискретные отсчеты сигналов датчика угла α(n) и углового ускорения  , по дискретным отсчетам сигнала датчика угла рассчитывают коэффициенты цифрового режекторного фильтра, которые используют для определения собственной круговой частоты колебаний маятника:
, по дискретным отсчетам сигнала датчика угла рассчитывают коэффициенты цифрового режекторного фильтра, которые используют для определения собственной круговой частоты колебаний маятника:
 ,
,
где: ω1 - собственная круговая частота колебаний маятника;
 - угол поворота собственного вектора характеристического уравнения;
- угол поворота собственного вектора характеристического уравнения;
а1 и а2 - коэффициенты цифрового фильтра;
 - оптимальное целое число шагов задержки сигнала в цифровом фильтре;
- оптимальное целое число шагов задержки сигнала в цифровом фильтре;
- частота дискретизации сигнала;
 - коэффициент затухания колебаний;
- коэффициент затухания колебаний;
по дискретным отсчетам сигналов датчиков угла и углового ускорения рассчитывают коэффициент преобразования углового ускорения в выходной электрический сигнал датчика:
 ,
,
где: s - коэффициент преобразования, размерностью  ;
;
 - собственная недемпфированная частота колебаний; при этом на величину коэффициента затухания колебаний маятника накладывают ограничение: β≤0,01, после чего датчик углового ускорения и динамический аналог датчика меняют местами и снова определяют коэффициент преобразования датчика в условиях действия на него углового ускорения и вектора линейного ускорения.
- собственная недемпфированная частота колебаний; при этом на величину коэффициента затухания колебаний маятника накладывают ограничение: β≤0,01, после чего датчик углового ускорения и динамический аналог датчика меняют местами и снова определяют коэффициент преобразования датчика в условиях действия на него углового ускорения и вектора линейного ускорения.
Дифференциальное уравнение свободных колебаний маятника вокруг оси вращения (ОВ), параллельной оси Ζ (фиг. 2).

где: Jz - момент инерции маятника относительно оси Z;
l - расстояние между центром масс (ЦМ) маятника и ОВ;
g - ускорение свободного падения;
φ - угол поворота маятника.
Уравнение (3) позволяет найти собственную частоту колебаний маятника, которая в силу нелинейности уравнения зависит от амплитуды угла поворота.
Для малых углов поворота собственная частота маятника определяется зависимостью (см. Маркеев А.П. Теоретическая механика. // М. «Наука», 1990, стр. 155):

где:  - приведенная длина маятника:
- приведенная длина маятника:  ;
;
φm = максимальный угол поворота маятника.
Поскольку маятник совершает затухающие колебания, то в соответствии с уравнением (4) по мере уменьшения угла поворота частота маятника будет меняться (расти), по этой причине колебания маятника становятся неизохронными.
В результате возникает ошибка в определении частоты, обусловленная неизохронностью колебаний.
Так, для максимального угла отклонения φm=8° ошибка составляет 0,12%, а для φ=6° соответственно 0,068%.
Дифференциальное уравнение колебаний маятника с учетом малости угла отклонения и сопротивлении потерь, пропорционального скорости:

где: h - коэффициент сопротивления.
Уравнение (5) путем несложных преобразований приводится к виду:

где: ω0 - собственная недемпфированная круговая частота маятника:
 :
:
β - коэффициент затухания колебаний: 
Если задать маятнику малое начальное отклонение φm, из уравнения (6) получим следующий закон изменения угла поворота по времени:

где: ω1 - собственная демпфированная круговая частота колебаний:  ;
;
Ψ - фазовый угол:  .
.
Закон изменения по времени углового ускорения:

Как видно из уравнения (8), для воспроизведения углового ускорения необходимо знание амплитуды φm, собственной круговой частоты ω0 и коэффициента затухания колебаний β.
Центральной задачей является определение собственной частоты колебаний по дискретным отсчетам сигнала датчика угла α(n).
Для ее решения цифровую последовательность угла поворота φ(n) пропускают через режекторный (нерекурсивный) цифровой фильтр (фиг. 3) с передаточной функцией:

где: z - оператор дискретного преобразования Лапласа;
m - коэффициент задержки сигнала в цифровом фильтре - целое число больше единицы (вводится с целью повышения точности измерения частоты колебаний);
К - масштабирующий коэффициент:
 .
.
Ζ - преобразование дискретной цифровой последовательности сигнала угла поворота:

После перехода в уравнении (7) к дискретному времени t=m·(n·Δt) и выполнения необходимых преобразований получают:

где: Δt- временной шаг дискретизации сигнала;
R - модуль корней характеристического уравнения, определяется коэффициентами b1,bn.
Выражение (11) является общим для класса сигналов, описываемых уравнением (7).
Для определения неизвестных коэффициентов b1 и b2 коэффициенты фильтра a1 и a2 настраивают таким образом, чтобы выполнялись условия:

при реализации которых фильтр «запирается», в результате чего выходная последовательность фильтра y(n) обращается в ноль.
Подбор коэффициентов a1 и a2 осуществляется следующим образом.
В соответствии с передаточной функцией (9) выходная цифровая последовательность фильтра:

Дисперсия y(n) (см. Марпл М.Л. и Марпл С.Л. Цифровой спектральный анализ и его приложения. // Пер. с англ. М., Мир, 1990):
где: N - общее количество отсчетов сигнала.
Для определения коэффициентов имеем два условия:
 ,
,
которые приводят к системе N-2m линейных уравнений, решаемых методом наименьших квадратов.
В результате получают (см. Худсон К. Статистика для физиков. // М., Мир, 1970, стр. 152):

где: а - вектор-столбец искомых коэффициентов:
 ;
;
φ, s - одностолбцовая и двухстолбцовая матрицы:


Τ - оператор транспонирования матриц.
Корни характеристического уравнения фильтра:

где: 
Частота запирания фильтра равна частоте колебаний маятника:

Входящий в выражение (16) угол α определяют коэффициентами a1 и а2 цифрового фильтра.
Поскольку коэффициенты содержат погрешности измерений, частота ω1 также будет измеряться с погрешностью.
Среднеквадратическая погрешность измерения частоты:

где:  и
и - среднеквадратические погрешности коэффициентов а1 и а2.
- среднеквадратические погрешности коэффициентов а1 и а2.

Выполняя дифференцирование уравнений (18), после несложных преобразований получают:

При  - погрешность достигает минимума:
- погрешность достигает минимума:
и

Подставляя в (16) оптимальное значение  , получим:
, получим:

где: ƒд - частота дискретизации сигнала:  ;
;
ƒ1 - частота колебаний маятника:  .
.
Коэффициент затухания β
В ряде случаев необходимо знать коэффициент затухания β. Такая необходимость возникает при измерении амплитуды угла поворота.
Из уравнения (15):

подставляют в уравнение (22):
 ,
,
и производя логарифмирование, после несложных преобразований получают:

Коэффициент преобразования датчика углового ускорения
Источником выходного сигнала ДУУ является тензометрический мост. Выходной сигнал моста, как принято, нормируют в относительных единицах.
В нашем случае:  ,
,
где:  - относительный выходной сигнал датчика;
- относительный выходной сигнал датчика;
ΔU - сигнальное напряжение;
Un - напряжение питания моста.
Между сигнальным напряжением и угловым ускорением существует линейная зависимость, которая подтверждается статической калибровкой датчика:  ,
,
где: s - коэффициент преобразования датчика.
Для определения коэффициента преобразования необходимо располагать опорным сигналом, который по форме совпадал бы с сигналом углового ускорения (8) (см. Хелстром К. Статистическая теория обнаружения сигналов. // М., Издательство иностранной литературы, 1963 г.) В качестве опорного берут сигнал угла поворота в уравнении (7).
Дисперсия разности сигналов с учетом дискретного времени:
 .
.
Полагая  , находят:
, находят:

По поводу выражения (24) необходимо сделать следующие замечания.
Дело в том, что сигналы угла поворота и ускорения отличаются по фазе. В первом случае фазовый угол +Ψ, а во втором -Ψ. При стремлении β→0 фазовый угол в соответствии с уравнением (7) стремится к  , и сигналы с точностью до знака совпадают по форме.
, и сигналы с точностью до знака совпадают по форме.
Обозначают погрешность измерения коэффициента s, обусловленную несовпадением формы сигналов, через  и подсчитывают зависимость δ% от коэффициента затухания β.
и подсчитывают зависимость δ% от коэффициента затухания β.
Результаты расчетов приведены в таблице №1.

Из таблицы №1 находим, что при:

погрешностью от несовпадения формы сигналов можно пренебречь.
Одновременно условие (25) обеспечивает с точностью 0,005% равенство частот ω0 и ω1, и, как следствие, частота ω0 перестает зависеть от коэффициента затухания β, который, в свою очередь, зависит от окружающей температуры, давления и других факторов.
Амплитуда угла поворота
Дискретный сигнал угла поворота:

С учетом малости коэффициента затухания колебаний β можно записать:

где: 
Дисперсия разности сигналов:
 .
.
Полагая:  , находим:
, находим:

Воспроизведение маятником линейного ускорения
При установке ДУУ на расстоянии lc от оси вращения маятника на ДУУ кроме углового ускорения действует и линейное ускорение. Чувствительность датчика к линейному ускорению объясняется некоторой остаточной несбалансированностью инерционной массы, выполненной в виде обода, насаженного на осесимметричный тензометрический элемент. Маятник позволяет выполнить, в случае необходимости, добалансировку ДУУ и тем самым свести к допустимому минимуму его чувствительность к линейному ускорению.
С этой целью ось ДУУ первоначально совмещают с осью маятника, где действует только угловое ускорение и отсутствует линейное ускорение.
После чего ДУУ и ДАД меняют местами, т.е. ось ДУУ будет находиться на расстоянии lc, от оси вращения маятника.
В общем случае вектор линейного ускорения в точке, смещенной на расстояние lc от оси вращения:

где: u - вектор скорости точки;
τ и ν - единичные взаимно перпендикулярные векторы.
Первый член уравнения (27) представляет центростремительное ускорение. При колебаниях датчика с круговой частотой ω0, центростремительное ускорение имеет частоту 2ω0 и при обработке сигнала датчика не учитывается.
Второй член является тангенциальным ускорением с амплитудой:

Маятник наиболее полно моделирует работу ДУУ в системе стенда при измерении моментов инерции, при этом точность калибровки повышается, если частота и амплитуда колебаний, при которых она проводится, близка или совпадает с ожидаемой частотой колебаний соответствующих рам стенда при измерении моментов инерции изделия.
На существующих стендах максимальное удаление датчика углового ускорения от оси вращения изделия составляет величину l≅0,5 м.
При φm=8°; ƒ0=0,8 Гц, aτ=1,76 м/сек2 или aτ=0,18·g.
Зная показания датчика при действии только углового ускорения и показания датчика при действии дополнительно линейного ускорения, при проведении измерений на стенде вводят поправки, позволяющие получить действующие значения углового ускорения с высокой точностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССО-ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК ИЗДЕЛИЯ | 2013 |
|
RU2562273C2 |
| СПОСОБ КАЛИБРОВКИ ВИДЕОГРАММЕТРИЧЕСКОЙ СИСТЕМЫ С ПОМОЩЬЮ МАЯТНИКА | 2023 |
|
RU2823551C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2008 |
|
RU2368880C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2010 |
|
RU2434213C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395061C1 |
| СПОСОБ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334198C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОТРОН | 2008 |
|
RU2403537C2 |
| Способ вычисления текущей разности фаз и частоты сигналов кориолисовых расходомеров | 2017 |
|
RU2687803C1 |
| Комплекс для определения инерционных характеристик с измерительной системой | 2017 |
|
RU2683800C2 |
| Универсальный прецизионный мехатронный стенд с инерциальными чувствительными элементами для контроля гироскопических измерителей угловой скорости | 2022 |
|
RU2804762C1 |
Изобретение относится к области измерительной техники, в частности к способам калибровки средств измерений, применяемых на стендах для определения моментов инерции изделий ракетной, авиационной и космической техники. Выходные параметры датчика снимают в двух положениях его установки на стенде для калибровки. Датчик углового ускорения устанавливают на оси подвески маятника, где он испытывает только угловое ускорение, и фиксируют его показания. При этом на расстоянии L от оси вращения на маятнике закреплен динамический аналог датчика. После выполнения измерений датчик и динамический аналог датчика меняют местами и опять фиксируют показания датчика при заданных амплитуде и частоте колебаний. Зная показания датчика при действии только углового ускорения и показания датчика при действии дополнительно линейного ускорения, при проведении измерений на стенде вводят поправки, позволяющие получить действующие значения углового ускорения с высокой точностью. 3 ил.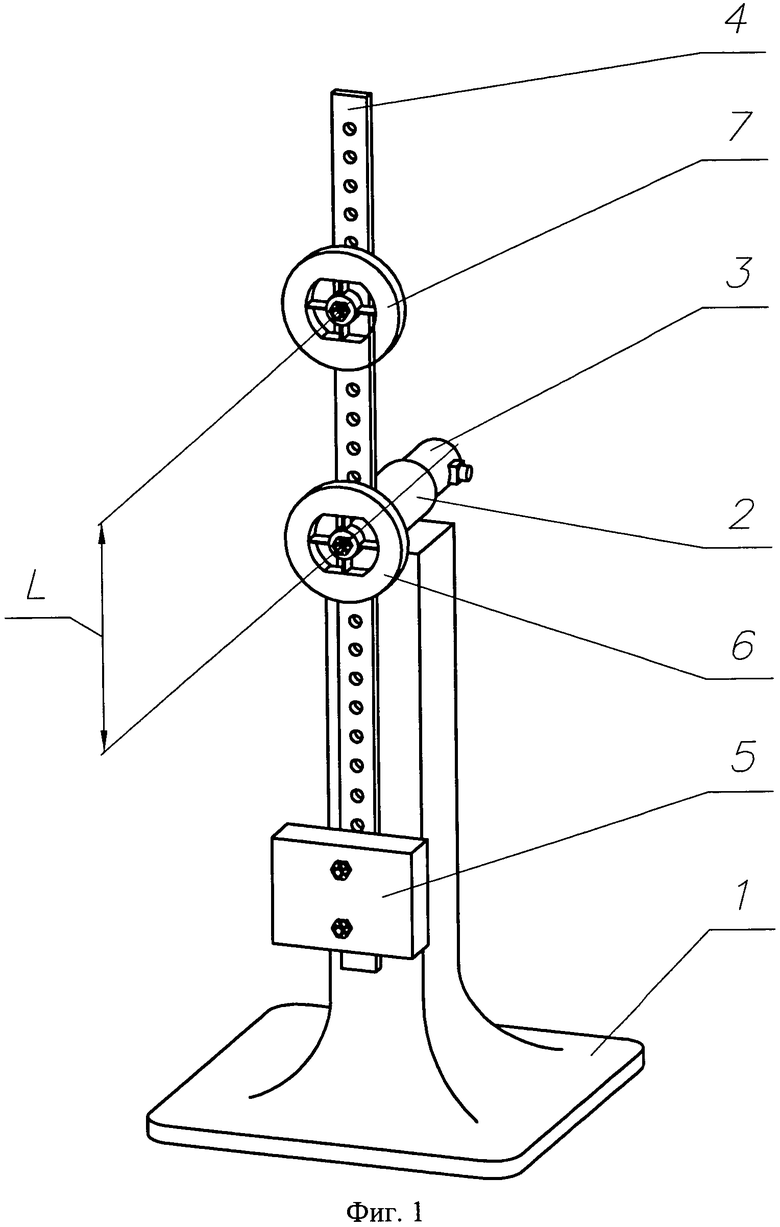
Способ калибровки датчика углового ускорения, заключающийся в том, что датчик углового ускорения устанавливают на вал, подвергают его действию известного углового ускорения и путем обработки выходного сигнала датчика находят коэффициент преобразования углового ускорения в электрический сигнал, отличающийся тем, что датчик углового ускорения устанавливают на маятнике, его ось совмещают с осью вращения маятника, а ось динамического аналога датчика - с точкой маятника, отстоящей от его оси вращения на заданное расстояние, маятник отклоняют на допустимый по условию изохронности угол φ(t=0)≤8° и отпускают, производят дискретные отсчеты сигналов датчика угла α(n) и углового ускорения  , по дискретным отсчетам сигнала датчика угла рассчитывают коэффициенты цифрового режекторного фильтра, которые используют для определения собственной круговой частоты колебаний маятника:
, по дискретным отсчетам сигнала датчика угла рассчитывают коэффициенты цифрового режекторного фильтра, которые используют для определения собственной круговой частоты колебаний маятника:
 ,
,
где: ω1 - собственная круговая частота колебаний маятника;
 - угол поворота собственного вектора характеристического уравнения;
- угол поворота собственного вектора характеристического уравнения;
а1 и а2 - коэффициенты цифрового фильтра;
 - оптимальное целое число шагов задержки сигнала в цифровом фильтре;
- оптимальное целое число шагов задержки сигнала в цифровом фильтре;
 - частота дискретизации сигнала;
- частота дискретизации сигнала;
 - коэффициент затухания колебаний;
- коэффициент затухания колебаний;
по дискретным отсчетам сигналов датчиков угла и углового ускорения рассчитывают коэффициент преобразования углового ускорения в выходной электрический сигнал датчика:
 ,
,
где: s - коэффициент преобразования, размерностью  ;
;
 - собственная недемпфированная частота колебаний;
- собственная недемпфированная частота колебаний;
при этом на величину коэффициента затухания колебаний маятника накладывают ограничение: β≤0,01, после чего датчик углового ускорения и динамический аналог датчика меняют местами и снова определяют коэффициент преобразования датчика в условиях действия на него углового ускорения и вектора линейного ускорения.
| СОКОЛОВ М.М., МАСАНДИЛОВ Л.Б | |||
| ИЗМЕРЕНИЕ ДИНАМИЧЕСКИХ МОМЕНТОВ В ЭЛЕКТРОПРИВОДАХ ПЕРЕМЕННОГО ТОКА, СТР | |||
| Паровозный золотник (байпас) | 1921 |
|
SU153A1 |
| ИЗДАТЕЛЬСТВО "ЭНЕРГИЯ", МОСКВА | |||
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ УНИФИЦИРОВАННЫХ СИСТЕМ ПОЗИЦИОНИРОВАНИЯ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ АКСЕЛЕРОМЕТРОВ И ГИРОСКОПОВ И АВТОМАТИЗИРОВАННЫЙ СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2381511C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| WO 1994024571 A1, 27.10.1994. | |||

