Область техники, к которой относится изобретение
Изобретение относится к области управления непрерывными технологическими процессами, в частности инерционными объектами с помощью вычислительных технических средств, и может быть использовано в химической, нефтехимической и других отраслях промышленности.
Уровень техники
Известен способ управления с использованием регулятора, в котором задающее воздействие (задание) изменяют на величину по модулю большую, чем требуемая, с чередованием значений больших, чем требуемое задающее воздействие и меньших, чем требуемое задающее воздействие или без такового, с последующей установкой задающего воздействия на требуемое значение (международная заявка, опубликованная в соответствии с договором о патентной кооперации, номер WO 2012/091634 A1, 05.07.2012, G05B 11/00).
Известный способ применительно к инерционным объектам не обеспечивает приемлемого качества управления, так как не предусматривает эффективные корректировки управляющего воздействия и не учитывает динамику объекта.
Известен также способ формирования ПИ-закона регулирования и диагностики автоматической системы, при котором входной сигнал, пропорциональный ошибке регулирования, интегрируют, получаемый при этом сигнал суммируют с входным сигналом и сумму масштабируют (формируют таким образом пропорционально-интегральное управляющее воздействие), определяют абсолютное значение входного сигнала и при превышении этим значением порогового уровня интегрируют разность входного сигнала и сигнала, пропорционального результату интегрирования, а с помощью анализа времен превышения порогового уровня формируют сигнал об аварийном состоянии системы (RU 2150727 C1, 16.06.1999, G05B 11/36) (прототип).
Недостатком известного способа является невысокое качество управления инерционным объектом вследствие неэффективного формирования управляющего воздействия как при отработке возмущений, так и при изменении задания.
Раскрытие изобретения
Цель изобретения - повышение качества управления инерционными объектами.
Указанная цель достигается тем, что в отличие от известного технического решения, в предлагаемом способе цифрового управления корректируют коэффициент пропорциональной составляющей управляющего воздействия в зависимости от знака сигнала ошибки регулирования и знака его производной, изменяют коэффициент интегральной составляющей управляющего воздействия в зависимости от абсолютного значения сигнала ошибки регулирования, к управляющему воздействию прибавляют импульсную компенсирующую составляющую, определяемую по производной задающего сигнала, а интервалы дискретности отдельных составляющих выбирают в зависимости от динамических свойств объекта управления.
Описание чертежей
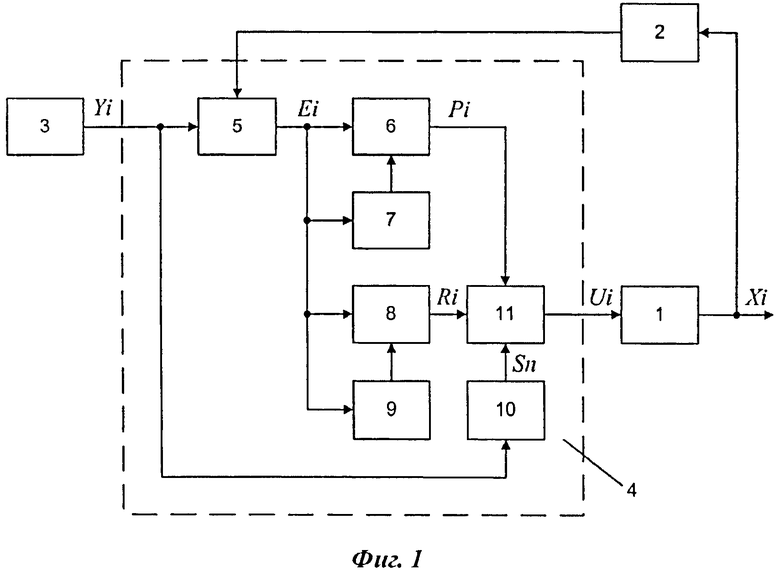
На фиг.1 представлена структурная схема системы, реализующей предлагаемый способ.
Осуществление изобретения
Система, реализующая предлагаемый способ, содержит (см. фиг.1)объект управления 1, датчик 2 регулируемой переменной, формирователь задания 3 и управляющий контроллер 4. Контроллер реализует функциональные блоки: блок сравнения 5, блок умножения 6, блок 7 коррекции пропорциональной составляющей, интегрирующий блок 8, блок 9 коррекции интегральной составляющей, блок 10 импульсной компенсации и сумматор 11.
Система, реализующая предлагаемый способ, работает следующим образом.
С помощью контроллера 4 осуществляется цифровое (с интервалом дискретности h0) регулирование переменной X объекта 1 по замеру от датчика 2 и получаемому заданию Y от блока 3. Ошибка регулирования E рассчитывается блоком 5:
Ei=Yi-Xi,
где i - номер цикла цифрового управления с интервалом дискретности h0.
С помощью блока 6 определяется пропорциональная составляющая Р управляющего воздействия U:
Pi=Kn·Ei,
где Kn - настроечный коэффициент, корректируемый с помощью блока 7 в n-м цикле с интервалом дискретности h1(h1≥h0):
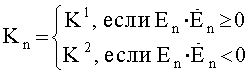
причем настраиваемые константы K1>K2.
С помощью блока 8 рассчитывается интегральная составляющая R управляющего воздействия U:
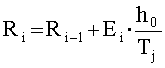
где Tj - настроечная постоянная времени интегрирования, корректируемая с помощью блока 9 j-м цикле с дискретностью h2(h2≥h0):
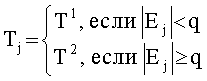
где q, T1, T2 - настраиваемые константы, причем T1<T2.
С помощью блока 10 выдается в n-м цикле с интервалом дискретности h1 компенсирующая составляющая управляющего воздействия U в виде импульсов следующей длительности:
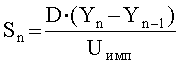
где Uимп - уровень импульса как допустимое значение компенсирующего воздействия;
D - настроечный коэффициент, зависящий от динамических свойств объекта 1.
Управляющее воздействие определяется с помощью блока 11:
Ui=Pi+Ri+Sn.
Увеличение пропорциональной составляющей при возрастании абсолютного значения ошибки (совпадении знаков ошибки и ее производной) позволяет уменьшить перерегулирования, снизить колебательность системы. Увеличение интегральной составляющей при малых значениях ошибки улучшает астатизм системы, снижает время регулирования. Импульсная компенсация изменений задающего сигнала существенно повышает быстродействие системы управления инерционным объектом. Сочетание всех составляющих цифрового управляющего воздействия, причем с разными интервалами дискретности, позволяет существенно повысить качественные характеристики управления инерционными объектами.
Для реализации способа может использоваться, например, управляющий контроллер БАЗИС-21.2ЦУ или другой из серии БАЗИС® производства ЗАО «Экоресурс».
Внедрение предлагаемого способа в серийно выпускаемых контроллерах серии БАЗИС® намечено на 2013 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КАСКАДНОГО ЦИФРОВОГО РЕГУЛИРОВАНИЯ | 2015 |
|
RU2600024C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ С РЕВЕРСИВНЫМ ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ | 2014 |
|
RU2568523C1 |
| СПОСОБ САМОНАСТРОЙКИ СИСТЕМЫ ПИД-РЕГУЛИРОВАНИЯ | 2014 |
|
RU2568386C2 |
| Система цифрового управления | 1981 |
|
SU970319A1 |
| Система автоматического управления для объектов с запаздыванием | 1984 |
|
SU1229726A1 |
| Система управления | 1977 |
|
SU705417A1 |
| Система управления нелинейным объектом | 1991 |
|
SU1833834A1 |
| Способ управления процессом выращивания монокристаллов под защитной жидкостью методом Чохральского и устройство для его осуществления | 1988 |
|
SU1745780A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| Система управления объекта с запаздыванием | 1984 |
|
SU1254435A1 |
Изобретение относится к области управления непрерывными технологическими процессами, в частности инерционными объектами с помощью вычислительных технических средств, и может быть использовано в химической, нефтехимической и других отраслях промышленности. Техническим результатом является повышение качества управления инерционными объектами. Способ заключается в формировании пропорциональной и интегральной составляющих управляющего воздействия с корректировкой их настроечных коэффициентов, выдаче компенсирующего воздействия на изменения задания, использовании различных интервалов дискретности для составляющих управляющего воздействия. 1 ил.
Способ цифрового управления инерционным объектом путем формирования по сигналу ошибки регулирования Ei пропорциональной Pi=Kn*Ei и интегральной Ri=Ri-1+Ei*h0/Tj составляющих управляющего воздействия, определения абсолютного значения ошибки регулирования, отличающийся тем, что дополнительно корректируют с дискретностью h1 коэффициент пропорциональной составляющей в зависимости от знаков ошибки и ее производной по формуле

изменяют с дискретностью h2 постоянную времени интегральной составляющей в зависимости от абсолютного значения ошибки по формуле

и к управляющему воздействию прибавляют с дискретностью h1 импульсную компенсирующую составляющую с шириной импульса, определяемой пропорционально производной задающего сигнала Y по формуле Sn=D*(Yn-Yn-1)/Uимп с настроечным коэффициентом D и допустимым уровнем импульса Uимп.
| Тепловая изоляция для паропроводов | 1936 |
|
SU49679A1 |
| СПОСОБ ФОРМИРОВАНИЯ ПИ-ЗАКОНА РЕГУЛИРОВАНИЯ И ДИАГНОСТИКИ АВТОМАТИЧЕСКОЙ СИСТЕМЫ | 1999 |
|
RU2150727C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ПЕРИОДА КОЛЕБАНИЙ КРУТИЛЬНОГО МАЯТНИКА | 1999 |
|
RU2157557C1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНЫХ СИГНАЛОВ | 1999 |
|
RU2156992C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ АСТАТИЧЕСКОГО ОБЪЕКТА | 1996 |
|
RU2103714C1 |
| US 3819999 A1, 25.06.1974 | |||
| US 4430698 A2, 07.02.1984 | |||

