Изобретение относится к области механики, в частности к вакуумной технике, и может быть использовано для позиционирования двух объектов вдоль одной координаты в разных направлениях с одинаковым шагом перемещения.
Известен прецизионный привод линейного перемещения [патент RU № 2644409, МПК: H01L41/08, H02N2/04, патентообладатель ПАО КМЗ, г. Красногорск, дата публик.: 12.02.2018 г., авторы: Пронин Р.И. и др.], содержащий основание и механизм перемещения подвижной платформы с позиционируемым объектом с помощью пьезоактуатора. Подвижная платформа с позиционируемым объектом установлена на основной подвижной платформе основании посредством упругих подвесов, механизм перемещения основной подвижной платформы выполнен в виде связки шарико-винтовой передачи и вентильного двигателя, при этом шарико-винтовая передача выполнена в виде механического привода, преобразующего вращательное движение в линейное перемещение, а к ходовой гайке шарико-винтовой передачи жестко прикреплена основная подвижная платформа, прецизионный привод дополнен системой управления, использующейся для формирования и коррекции управляющих сигналов для вентильного двигателя и пьезоактуатора, включающей устройства обратной связи, связанных с блоком управления, первое из которых - магнитный энкодер, предназначенный для определения положения основной подвижной платформы с микрометровой точностью, и второе - встроенный в пьезоактуатор тензодатчик для контроля положения подвижной платформы с позиционируемым объектом с нанометровой точностью.
Известное техническое решение выбрано в качестве наиболее близкого по технической сущности аналога, но оно предназначено для позиционирования только одного объекта и в одном направлении и не решает задач позиционирования двух объектов их синхронности и разнонаправленного перемещения относительно друг друга.
Технический результат изобретения заключается в расширении функциональных возможностей за счет добавления дополнительного механизма перемещения с позиционируемым объектом.
Указанный технический результат достигается тем, что для соединенной между собой системы управления, связанной с электродвигателем, блоком управления и устройством обратной связи и основным механизмом перемещения с платформой, на который установлен позиционируемый объектом с возможностью линейного перемещения вдоль основания, новым является то, что содержит также установленный с возможностью линейного перемещения вдоль основания дополнительный механизм перемещения с платформой с позиционируемым объектом, при этом механизмы перемещения размещены соосно и выполнены в виде шарико-винтовой передачи или трапецеидальной резьбы с гайкой, одинаковым шагом и с противоположными направлениями винтовой канавки или резьбы соответственно, и соединены через муфту или составляют единую конструкцию, в качестве устройства обратной связи используют энкодер в составе электродвигателя, либо размещенный на его валу, или датчик линейного перемещения, расположенный на основании.
Влияние отличительных признаков формулы изобретения на вышеуказанный технический результат
Содержание в приводе закрепленного с возможностью линейного перемещения вдоль основания дополнительного механизма перемещения с платформой с позиционируемым объектом позволяет обеспечить синхронное перемещение двух объектов позиционирования за счет одного электродвигателя.
Размещение механизмов соосно и выполнение в виде шарико-винтовой передачи или трапецеидальной резьбы с гайкой позволяет выбрать оптимальное соотношение цены и точности перемещений.
Наличие одинакового шага и противоположных направлений винтовой канавки или резьбы соответственно позволяет обеспечить симметричность позиционирования объектов.
Соединение основного и дополнительного механизмов через муфту или выполнение их в виде единой конструкции позволяет выбрать оптимальную технологичность изделия в зависимости от возможностей предприятия-изготовителя.
Использование в качестве устройства обратной связи энкодера, в составе электродвигателя, либо отдельно размещенного на его валу, или датчика линейного перемещения, расположенного на основании, позволяет подобрать оптимальное решение в зависимости от требуемой точности позиционирования объекта.
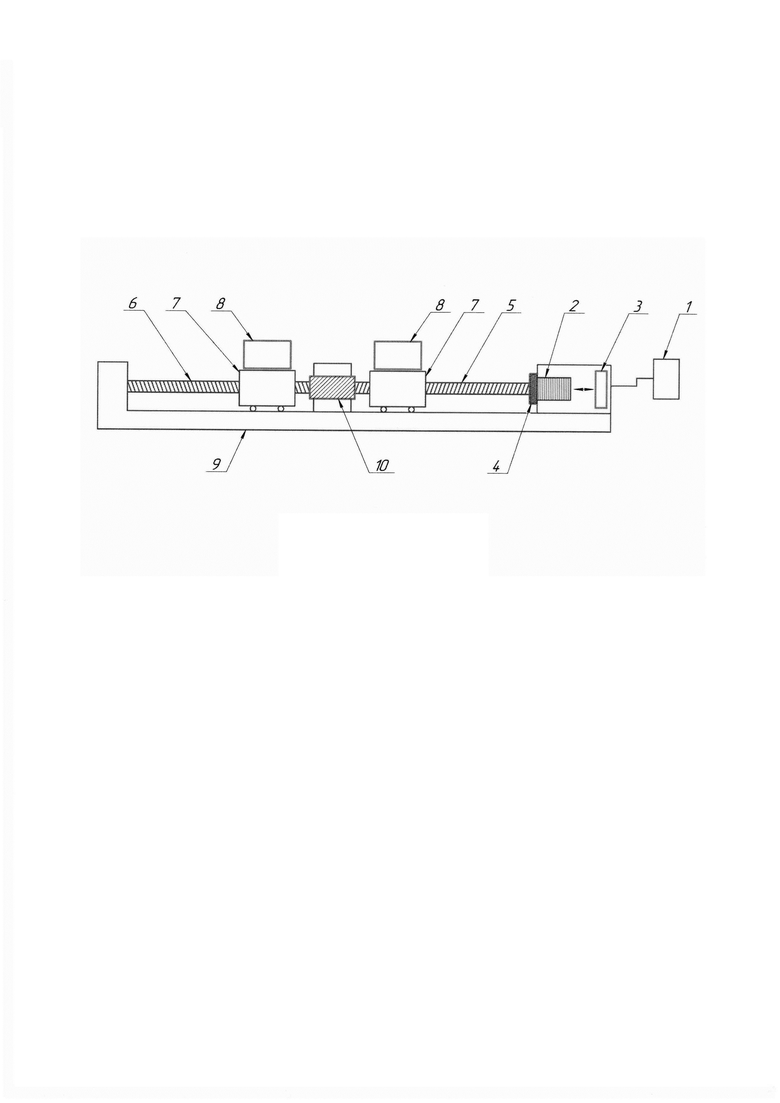
Рассмотрим реализацию предлагаемого изобретения, представленного на функциональной схеме привода на чертеже, где позициями обозначены: 1 - система управления, 2 - электродвигатель, 3 - блок управления, 4 - устройство обратной связи, 5 - основной механизм перемещения, 6 - дополнительный механизм перемещения, 7 - платформа, 8 - позиционируемый объект, 9 - основание, 10 - муфта соединительная.
Привод линейного перемещения содержит соединенную между систему управления 1 связанную с электродвигателем 2, блоком управления 3 и устройством обратной связи 4 и установленные с возможностью линейного перемещения вдоль основания 9 основной 5 и дополнительный 6 механизмы перемещения с позиционируемыми объектами 8. При этом основной и дополнительный механизмы перемещения 5,6 размещены соосно и выполнены в виде шарико-винтовой передачи, а в другом варианте реализации - в виде трапецеидальной резьбы с гайкой. Причем винтовая канавка или резьба выполнены с одинаковым шагом и с противоположными направлениями и соединены через муфту 10, а в другом варианте реализации составляют единую конструкцию.
В качестве устройства обратной связи 4 используют энкодер, в составе электродвигателя, либо размещенный на его валу, или датчик линейного перемещения, расположенный на основании (на схеме не показан).
Привод линейного перемещения работает следующим образом.
Основной и дополнительный механизмы перемещения 5, 6 синхронно приводятся в действие электродвигателем 2 системы управления 1. После приведения в действие шарико-винтовых передач происходит синхронное перемещение платформ 7 с объектом позиционирования 8, установленном на платформе, вдоль оси. От устройства обратной связи 4 магнитного энкодера или датчика линейного перемещения на блок управления 3 передаются данные о текущем положении платформ 7 относительно жесткого основания 9.
Полученные блоком управления 3 данные передаются на систему управления 1, в которой возможно управление как в автоматическом, по заданной программе, так и в ручном режиме.
Муфта соединительная 10 обеспечивает соединение основного и дополнительного механизмов перемещения 5, 6 для обеспечения синхронного перемещения платформ 7.
На предприятии проведена конструкторская проработка. В данный момент изготавливается опытный образец. Таким образом, предлагаемое изобретение позволит расширить функциональные возможности устройства, и сократить количество электродвигателей, и синхронно спозиционировать два объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕЦИЗИОННЫЙ ПРИВОД ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2016 |
|
RU2644409C1 |
| СИСТЕМА ИМИТАЦИИ АКСЕЛЕРАЦИОННЫХ ВОЗДЕЙСТВИЙ ПОЛУНАТУРНОГО МОДЕЛИРУЮЩЕГО КОМПЛЕКСА ЭРГОНОМИЧЕСКОГО ПРОЕКТИРОВАНИЯ | 2024 |
|
RU2834755C1 |
| ФРЕЗЕРНЫЙ СТАНОК | 2019 |
|
RU2705482C1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2024 |
|
RU2835700C1 |
| МЕХАТРОННАЯ СИСТЕМА ФОРМИРОВАНИЯ ИНДИВИДУАЛЬНОГО ИНТРАОПЕРАЦИОННОГО ПОЛОЖЕНИЯ ПАЦИЕНТА | 2022 |
|
RU2803982C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Роботизированная хирургическая система транскатетерного протезирования клапана аорты | 2022 |
|
RU2789707C1 |
| НАГРУЖАЮЩИЙ МЕХАНИЗМ СТЕНДА ДЛЯ ИСПЫТАНИЙ ТРОСОВОГО ПРИВОДА | 2016 |
|
RU2649216C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА ПО ДВУМ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫМ НАПРАВЛЕНИЯМ | 2014 |
|
RU2579781C2 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
Изобретение относится к области механики, в частности к вакуумной технике, и может быть использовано для позиционирования двух объектов вдоль одной координаты в разных направлениях с одинаковым шагом перемещения. Привод линейного перемещения содержит соединенную между собой систему управления, связанную с электродвигателем, блоком управления и устройством обратной связи, и основной механизм перемещения с платформой, на который установлен позиционируемый объектом с возможностью линейного перемещения вдоль основания. Привод содержит также установленный с возможностью линейного перемещения вдоль основания дополнительный механизм перемещения с платформой с позиционируемым объектом, при этом механизмы перемещения размещены соосно и выполнены в виде шарико-винтовой передачи или трапецеидальной резьбы с гайкой, одинаковым шагом и с противоположными направлениями винтовой канавки или резьбы соответственно и соединены через муфту или составляют единую конструкцию. В качестве устройства обратной связи используют энкодер в составе электродвигателя, либо размещенный на его валу, или датчик линейного перемещения, расположенный на основании. Технический результат: расширение функциональных возможностей. 1 ил.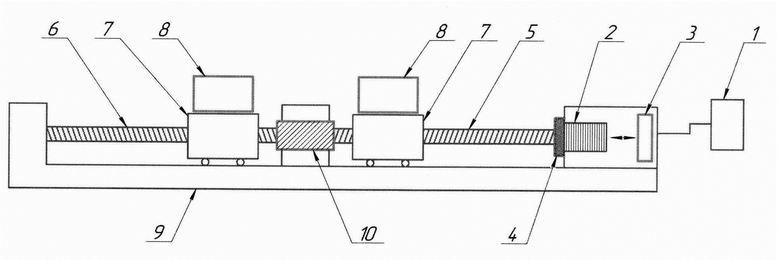
Привод линейного перемещения, содержащий соединенную между собой систему управления, связанную с электродвигателем, блоком управления и устройством обратной связи, и основной механизм перемещения с платформой, на который установлен позиционируемый объектом с возможностью линейного перемещения вдоль основания, отличающийся тем, что содержит также установленный с возможностью линейного перемещения вдоль основания дополнительный механизм перемещения с платформой с позиционируемым объектом, при этом механизмы перемещения размещены соосно и выполнены в виде шарико-винтовой передачи или трапецеидальной резьбы с гайкой, одинаковым шагом и с противоположными направлениями винтовой канавки или резьбы соответственно и соединены через муфту или составляют единую конструкцию, в качестве устройства обратной связи используют энкодер в составе электродвигателя, либо размещенный на его валу, или датчик линейного перемещения, расположенный на основании.
| ПРЕЦИЗИОННЫЙ ПРИВОД ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2016 |
|
RU2644409C1 |
| Привод каретки плосковязальной машины | 1990 |
|
SU1737045A1 |
| Линейный шаговый электродвигатель | 1991 |
|
SU1814165A1 |
| KR 1020190116981 A, 15.10.2019. | |||

