Изобретение относится к области неразрушающего контроля, конкретно к области ультразвукового контроля сварных швов труб.
Известен способ ультразвукового контроля труб, включающий заполнение иммерсионной ванны водой, при помощи, например, пьезоэлектрических преобразователей, перемещение труб через ванну, согласно которому поверхностный слой воды, заполняющий иммерсионную ванну и соприкасающийся с контролируемой поверхностью трубы, перемещают путем подачи в иммерсионную ванну дополнительно струи воды при помощи сопла, установленного эквидистантно поверхности контролируемой трубы, погруженного в воду до уровня поверхностного слоя воды, через которое подается в иммерсионную ванну вода по ходу движения трубы со скоростью Vв, превышающей скорость перемещения трубы Vтр и скорости Vн всех остальных слоев воды через иммерсионную ванну на всю ее глубину Н для исключения заполнения водой внутренней полости трубы. Известное устройство для ультразвукового контроля труб, содержащее иммерсионную ванну, механизм заполнения иммерсионной ванны водой и пьезоэлектрические преобразователи, содержит сопло, установленное эквидистантно поверхности контролируемой трубы, погруженное в воду до уровня поверхностного слоя воды, через которое дополнительно подается в иммерсионную ванну вода по ходу движения трубы со скоростью и давлением, достаточным для перемещения поверхностного слоя воды со скоростью Vв, превышающей скорость Vтр движения трубы через иммерсионную ванну и скорости Vм всех остальных слоев воды на всю глубину Н иммерсионной ванны для исключения заполнения водой внутренней полости трубы.
Недостатком известного способа является низкая производительность ультразвукового контроля, обусловленная низкой скоростью движения трубы в ванне, перемещаемой по поверхности воды [1].
Известна установка для ультразвукового контроля сварных труб, содержащая подвижно установленную на направляющих ходовую тележку с приводом, размещенный на ней подъемник, соединенную с подъемником подвеску с ультразвуковыми преобразователями, световыми указателями и краскоотметчиком дефектных участков, в которой, с целью снижения трудоемкости контроля сварных швов, подвеска выполнена в виде четырехзвенного шарнирного параллелограмма, закрепленных на расположенной в плоскости четырехзвенного шарнирного параллелограмма оси коромысел, установленных перпендикулярно к коромыслам с возможностью перемещения по ним щек, каждая из которых снабжена кронштейном с шарнирным креплением ультразвукового преобразователя и установленными симметрично оси ультразвукового преобразователя базирующими роликами.
К недостатку известной установки следует отнести высокую сложность настройки ультразвуковых преобразователей для осуществления ультразвукового контроля торцов трубы и отсутствие надежной системы автоматического управления процессом контроля [2].
Известна ультразвуковая система с набором фазированных решеток и способ контроля спиралевидных сварных швов, предназначенный для контроля спиралевидных сварных швов в HSAW для всех стандартных типов дефектов за один проход сканирования, расположенных как на внутренней, так и на внешней поверхности трубы и исключения необходимости создания механической регулировки преобразователей в процессе сканирования. Способ включает в себя использование по меньшей мере одного линейного преобразователя, по крайней мере одной пары преобразователей для сканирования продольных дефектов и по меньшей мере двух пар преобразователей для сканирования поперечных дефектов.
Известный способ состоит из следующих этапов:
a) с использованием по меньшей мере одного преобразователя (слой 1), расположенного над сварным швом и перекрывающего осевую линию трубы для контроля дефектов расслоения, которые расположены в сварном шве;
b) с использованием по меньшей мере двух пар преобразователей (слой 2), установленных параллельно оси трубы и размещенных на противоположных сторонах сварного шва таким образом, что позволяет обратить их лицом друг к другу и ориентировать на ту же самую общую область сварного шва одновременно для полного контроля стандартно известных типов продольных дефектов, расположенных на сварном шве;
c) с использованием по меньшей мере третьей и четвертой пар (слой 3), соответственно размещенных симметрично на противоположных сторонах шва таким образом, что позволяет соответствующие пары по принципу фокусировки обратить лицом друг к другу и ориентировать на ту же самую общую область сварного шва одновременно, для полного контроля стандартно известных типов продольных дефектов, расположенных на сварном шве, и где контроль осуществляется за один проход сканирования над спиралевидным сварным швом.
Кроме того, известен случай, по которому комплект преобразователей может перемещаться только вдоль сварного шва и фиксироваться в любых других направлениях, кроме параллели сварному шву.
Известна система преобразователей с фазированными решетками, которая предназначена для выполнения следующих задач:
а) для расчет удельного пути ультразвука, возникающего из отверстия на одном конце одного из третьей пары преобразователей, который достигает самой дальней стороны сварного шва, на которой, возможно, располагается один из поперечных дефектов, с возвращающимся лучом, который заканчивается на приемном отверстии преобразователя, путь звука включает в себя использование по меньшей мере одного механического угла и углов поворотов;
a) для оценки, находится ли возвращающийся луч в пределах заданного допуска расстояния;
b) для вычисления максимальной контролируемой ширины шва, которая должна быть больше, чем заданная ширина шва по условиям контроля;
c) для определения эксплуатационных параметров, включая соответствующие позиции третьей или четвертой пары преобразователей, механического угла, углов поворота преобразователей для контроля поперечных дефектов.
К недостатку известного способа и известной системы преобразователей с фазированной решеткой относится относительная сложность автоматического управления процессом контроля при сканировании линейных сварных швов, параллельных оси трубы и необходимость особо точной симметричной установки (фокусировки) лицом друг к другу комплектов преобразователей для непрерывного сканирования одновременно с двух противоположных сторон сварного шва на всю его глубину. Данный недостаток усложняет процесс и препятствует максимальному увеличению производительности УЗК сварных прямолинейных швов на трубах [3].
Принятые обозначения в описании процесса УЗК сварных швов труб:
- УЗК - ультразвуковой контроль;
- ПР - поворотные ролики;
- УВК - Управляющий Вычислительный комплекс;
- УП - ультразвуковой преобразователь;
- ИМ - измерительный модуль;
- ПУС - программа управления сканированием;
- L1M - длина измерительного модуля вдоль трубы;
- L1 - расстояние от торцов трубы до заднего конца измерительного модуля в крайнем левом положении относительно трубы;
- Δ=L1-L1M - расстояние от торца трубы до заднего конца измерительного модуля в крайнем левом положении ИМ.
Δ=L1M-L2 - расстояние от торца трубы до заднего конца измерительного модуля в крайнем правом положении ИМ.
- ДПБ1 и ДПБ2 - дополнительные программные блоки в ПУС и УВК;
- L3 - безопасное положение ИМ после окончания сканирования шва первой части трубы
- Тр - контролируемая труба
Из техники ультразвукового контроля известны установки для УЗК труб, которые контролируют область сварного шва в одном направлении.
Известный процесс контроля включает следующие операции:
1. Труба транспортируется в зону контроля с помощью рольганга или транспортной тележки.
2. Труба поворачивается с помощью ПР таким образом, что шов занимает определенное положение, например 12 часов.
3. УВК с помощью ПУС осуществляет перемещение ИМ относительно трубы (либо трубы относительно ИМ) на небольшой скорости V0. УВК управляет посадкой ультразвуковых преобразователей: УП один за другим осуществляют посадку на трубу как можно ближе к ее торцу (чтобы минимизировать УП неконтролируемые зоны).
4. После того как все УП завершили посадку на трубу, УВК увеличивает скорость сканирования до номинального значения VN. Сканирование зоны шва каждым УП завершается при достижении им второго торца трубы, после чего соответствующий УП отводится в безопасное положение.
К недостаткам приведенных выше аналогов также относятся:
- Низкая производительность ультразвукового контроля, обусловленная тем, что посадка УП осуществляется на сравнительно низкой скорости V0 и требует значительного времени, особенно в случае большого числа УП и связанной с этим значительной длины ИМ.
- Значительные неконтролируемые зоны в области первого торца, обусловленные тем, что при посадке каждого УП последнему требуется некоторое время (как правило, не менее 1 с) для создания надежного акустического контакта с трубой.
- Высокий риск повреждения оборудования при посадке УП. Этот риск обусловлен требованием минимизации неконтролируемых зон. В случае если один из УП совершил посадку несколько раньше, чем под ним появилась труба, то ее торец неминуемо повредит УП и элементы его подвески.
Целью настоящего изобретения является повышение производительности ультразвукового контроля, сокращение неконтролируемых зон в области обоих торцов трубы и повышение уровня технологической безопасности УЗК.
Указанная выше цель достигается тем, что в способе ультразвукового контроля сварных швов труб, включающем транспортировку трубы в зону контроля с помощью рольганга или транспортной тележки, измерительный модуль с комплектом ультразвуковых преобразователей, сканирующий сварной шов и вычислительный комплекс, управляющий процессом контроля, перед началом процесса контроля труба поворачивается с помощью ПР таким образом, что
a) сварной шов занимает рабочее положение, например 12 часов, после чего:
b) УВК с помощью ПУС и содержащегося в нем дополнительного программного блока ДПБ1 осуществляет практически одновременное опускание всех УП на трубу в зоне, как правило отстоящей от любого из торцов на расстояние L1>LIM, где LIM - длина ИМ вдоль трубы, если необходимо, делается короткая пауза для обеспечения акустического контакта УП с трубой, и ИМ начинает рабочее движение и осуществляет сканирование со скоростью V1 в направлении одного из торцов либо труба приводится в движение относительно ИМ;
c) после того как все УП, принимающие участие в контроле, поднялись в рабочее положение, контроль первой части трубы завершается, ИМ возвращается в положение, которое несколько ближе к торцу проконтролированной части трубы, чем LIM, чтобы обеспечить некоторое перекрытие, УВК с помощью ПУС и содержащегося в нем программного дополнительного блока ДПБ1 опять осуществляет практически одновременное опускание всех УП на трубу, при этом расстояние L2 от первого торца до ИМ должно удовлетворять условию: L2≤LIM, если необходимо, делается короткая пауза для обеспечения акустического контакта УП с трубой и ИМ начинает рабочее движение и осуществляет сканирование в обратном направлении со скоростью V2, УВК управляет подъемом ультразвуковых преобразователей в безопасное положение при их достижении соответствующим УП торца трубы или даже несколько позже, позволяя УП «соскакивать» с трубы, минимизируя таким образом неконтролируемые зоны, при этом УВК, дополнительно содержащий программный блок ДПБ2, позволяет по ходу сканирования «сшивать» данные и демонстрировать результаты контроля на общей дефектограмме, где каждая обнаруженная несплошность или иная особенность состояния участка трубы имеет однозначно определяемую протяженность и координату, независимо от того, в каком направлении сканирования она была зарегистрирована, после чего контроль сварного шва и околошовной зоны трубы завершается.
Кроме того, в способе ультразвукового контроля сварных швов труб выполняется условие V2=-|V1|, в направлении второго торца, либо труба приводится в движение относительно ИМ, при возвращении ИМ от второго торца трубы сканирование осуществляется с ускорением при условии: V2>V1.
Система для осуществления способа УЗК сварных швов труб, содержащая измерительный модуль ИМ с находящимся на нем ультразвуковыми преобразователями УП, поворотные ролики ПР и систему автоматического управления процессом контроля, в свою очередь включающую программу управления сканированием ПУС и Управляющий Вычислительный Комплекс УВК, позволяющий, в частности, обрабатывать, демонстрировать и архивировать результаты ультразвукового контроля, отличающаяся тем, что ПУС для сканирования сварного шва дополнительно содержит программный блок ДПБ1, позволяющий часть трубы сканировать в одном направлении, а другую часть - в противоположном направлении, причем УВК дополнительно содержит программный блок ДПБ2, позволяющий «сшивать» данные и демонстрировать результаты контроля на общей дефектограмме, где каждая обнаруженная несплошность или иная особенность состояния участка трубы имеет однозначно определяемую протяженность и координату, независимо от того, в каком направлении сканирования она была зарегистрирована.
Описание предлагаемого ультразвукового способа (технологии) контроля сварного шва трубы.
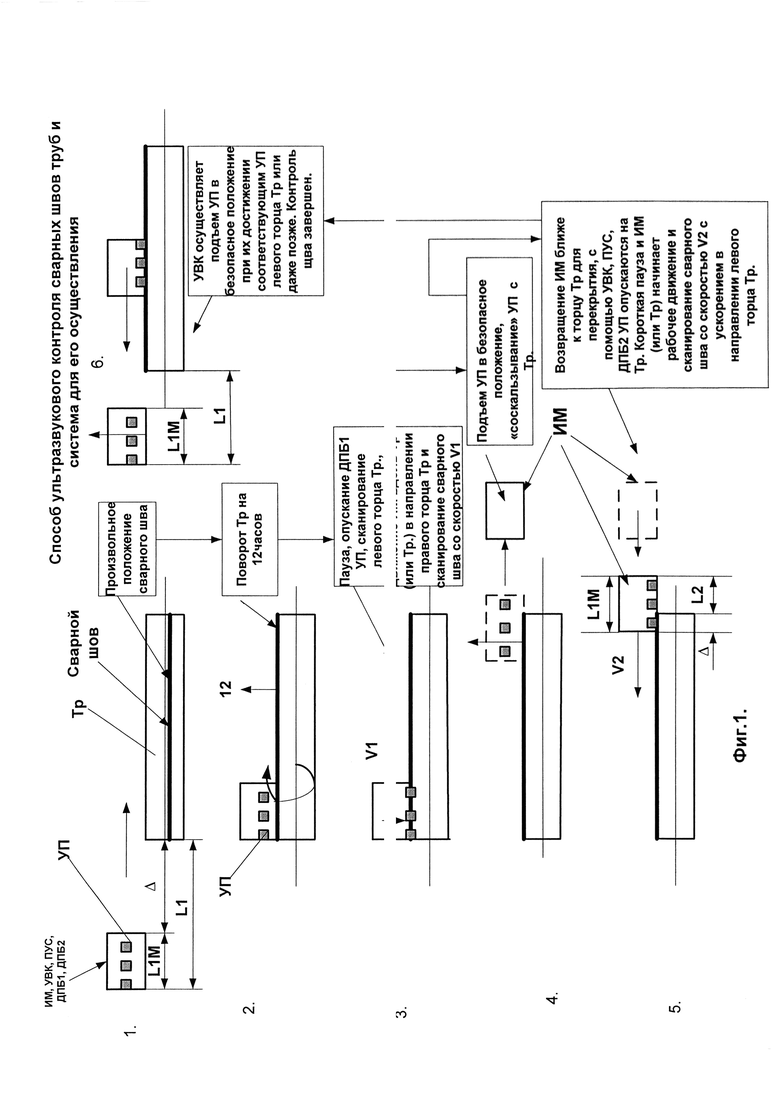
Алгоритм процесса (схема на фиг. 1, фото на фиг. 2 - опытная установка для реализации способа и системы управления процессом - момент сканирования прямолинейного сварного шва при помощи измерительного модуля ИМ).
1. Труба транспортируется в зону контроля с помощью рольганга или транспортной тележки (фиг. 1, положение 1).
2. Труба поворачивается с помощью ПР таким образом, что шов занимает рабочее положение, например 12 часов (фиг. 1, положение 2).
3. УВК с помощью ПУС и содержащегося в нем дополнительного блока осуществляет практически одновременное опускание всех УП на трубу в зоне, как правило отстоящей от любого из торцов на расстояние L1>LIM, где LIM - длина ИМ вдоль трубы, если необходимо, делается короткая пауза для обеспечения акустического контакта УП с трубой и ИМ начинает рабочее движение и осуществляет сканирование со скоростью V1 в направлении одного из торцов либо труба приводится в движение относительно ИМ (фиг. 1, положение 3).
4. УВК управляет подъемом ультразвуковых преобразователей в безопасное положение при их достижении соответствующим УП торца трубы или даже несколько позже, позволяя УП «соскакивать» с трубы, минимизируя таким образом неконтролируемые зоны (фиг. 1, положение 4)
5. После того как все УП, принимающие участие в контроле, поднялись в рабочее положение, контроль первой части трубы завершен. ИМ возвращается в положение, которое несколько ближе к торцу проконтролированной части трубы, чем LIM, чтобы обеспечить некоторое перекрытие. УВК с помощью ПУС и содержащегося в нем дополнительного блока опять осуществляет практически одновременное опускание всех УП на трубу. Теперь расстояние от первого торца до ИМ L2 должно удовлетворять условию: L2≤LIM. Опять, если необходимо, делается короткая пауза для обеспечения акустического контакта УП с трубой, и ИМ начинает рабочее движение и осуществляет сканирование в обратном направлении со скоростью V2 (имеет смысл, чтобы выполнялось равенство VN2=-|VN|, но это не является обязательным условием) в направлении второго торца (либо труба приводится в движение относительно ИМ) (фиг. 1, положение 5).
6. УВК управляет подъемом ультразвуковых преобразователей в безопасное положение при их достижении соответствующим УП второго торца трубы, или даже несколько позже, позволяя УП «соскакивать» с трубы, минимизируя таким образом неконтролируемые зоны. Контроль сварного шва и околошовной зоны трубы завершен (фиг. 1, положение 6).
Источники информации
1. Патент РФ №2488814
2. Патент РФ №2008666
3. Патент США №9032802
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ НЕПРОВАРА В СВАРНЫХ ШВАХ ТОНКОСТЕННЫХ ИЗДЕЛИЙ | 2003 |
|
RU2256907C1 |
| СПОСОБ И УСТРОЙСТВО АКУСТИЧЕСКОЙ ДИАГНОСТИКИ СВАРНЫХ ШВОВ ТРУБОПРОВОДОВ | 2007 |
|
RU2325637C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ДЕФЕКТНОСТИ МЕТАЛЛИЧЕСКОГО ИЗДЕЛИЯ | 2019 |
|
RU2723368C1 |
| УСТРОЙСТВО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ СВАРНЫХ ШВОВ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ АВТОМАТИЧЕСКОЙ ЛИНИИ | 1999 |
|
RU2187103C2 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ИЗГОТОВЛЕНИЯ ОБОЛОЧКИ ТЕПЛОВЫДЕЛЯЮЩЕГО ЭЛЕМЕНТА | 2003 |
|
RU2244356C2 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ КАЧЕСТВА СВАРНЫХ ШВОВ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 2002 |
|
RU2233443C2 |
| Устройство для ультразвукового контроля сварных швов изделий | 1983 |
|
SU1107044A1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ СВАРНЫХ СОЕДИНЕНИЙ ТРУБ МАЛОГО ДИАМЕТРА | 2009 |
|
RU2394235C1 |
| Способ оценки работоспособности искательной системы дефектоскопических средств при высокоскоростном контроле рельсов | 2021 |
|
RU2758403C1 |
| Способ внутритрубного ультразвукового контроля сварных швов | 2016 |
|
RU2621216C1 |

Использование: для ультразвукового контроля сварных швов труб. Сущность изобретения заключается в том, что перед началом процесса контроля труба поворачивается с помощью ПР (поворотных роликов) таким образом, что a) сварной шов занимает рабочее положение, например 12 часов, после чего: b) УВК (управляющий вычислительный комплекс) с помощью ПУС (программы управления сканированием) и содержащегося в нем дополнительного программного блока ДПБ1 осуществляет практически одновременное опускание всех УП (ультразвуковых преобразователей) на трубу в зоне, как правило отстоящей от любого из торцов на расстояние L1>LIM, где LIM - длина ИМ (измерительного модуля) вдоль трубы, если необходимо, делается короткая пауза для обеспечения акустического контакта УП с трубой, и ИМ начинает рабочее движение и осуществляет сканирование со скоростью V1 в направлении одного из торцов (либо труба приводится в движение относительно ИМ); с) после того как все УП, принимающие участие в контроле, поднялись в рабочее положение, контроль первой части трубы завершается, ИМ возвращается в положение, которое несколько ближе к торцу проконтролированной части трубы, чем LIM, чтобы обеспечить некоторое перекрытие, УВК с помощью ПУС и содержащегося в нем дополнительного программного блока ДПБ1 опять осуществляет практически одновременное опускание всех УП на трубу, при этом расстояние L2 от первого торца до ИМ должно удовлетворять условию: L2≤LIM, если необходимо, делается короткая пауза для обеспечения акустического контакта УП с трубой и ИМ начинает рабочее движение и осуществляет сканирование в обратном направлении со скоростью V2, УВК управляет подъемом ультразвуковых преобразователей в безопасное положение при их достижении соответствующим УП торца трубы или даже несколько позже, позволяя УП «соскакивать» с трубы, минимизируя таким образом неконтролируемые зоны, при этом УВК, дополнительно содержащий программный блок ДПБ2, позволяет по ходу сканирования «сшивать» данные и демонстрировать результаты контроля на общей дефектограмме. Технический результат: повышение производительности ультразвукового контроля, сокращение неконтролируемых зон в области обоих торцов трубы и повышение уровня технологической безопасности ультразвукового контроля. 2 н. и 2 з.п. ф-лы, 2 ил.
1. Способ ультразвукового контроля сварных швов труб, включающий транспортировку трубы в зону контроля с помощью рольганга или транспортной тележки, измерительный модуль с комплектом ультразвуковых преобразователей, сканирующий сварной шов и вычислительный комплекс, управляющий процессом контроля, отличающийся тем, что
a) перед началом процесса контроля труба поворачивается с помощью ПР таким образом, что сварной шов занимает рабочее положение, например, 12 часов, после чего:
b) УВК с помощью ПУС и содержащегося в нем дополнительного программного блока ДПБ1 осуществляет практически одновременное опускание всех УП на трубу в зоне, как правило отстоящей от любого из торцов на расстояние L1 > LIM, где LIM - длина ИМ вдоль трубы, если необходимо, делается короткая пауза для обеспечения акустического контакта УП с трубой, и ИМ начинает рабочее движение и осуществляет сканирование со скоростью V1 в направлении одного из торцов либо труба приводится в движение относительно ИМ;
c) после того как все УП, принимающие участие в контроле, поднялись в рабочее положение, контроль первой части трубы завершается, ИМ возвращается в положение, которое несколько ближе к торцу проконтролированной части трубы, чем LIM, чтобы обеспечить некоторое перекрытие, УВК с помощью ПУС и содержащегося в нем дополнительного программного блока ДПБ1 опять осуществляет практически одновременное опускание всех УП на трубу, при этом расстояние L2 от первого торца до ИМ должно удовлетворять условию: L2 ≤ LIM, если необходимо, делается короткая пауза для обеспечения акустического контакта УП с трубой и ИМ начинает рабочее движение и осуществляет сканирование в обратном направлении со скоростью V2, УВК управляет подъемом ультразвуковых преобразователей в безопасное положение при их достижении соответствующим УП торца трубы или даже несколько позже, позволяя УП «соскакивать» с трубы, минимизируя таким образом неконтролируемые зоны, при этом УВК, дополнительно содержащий программный блок ДПБ2, позволяет по ходу сканирования «сшивать» данные и демонстрировать результаты контроля на общей дефектограмме, где каждая обнаруженная несплошность или иная особенность состояния участка трубы имеет однозначно определяемую протяженность и координату, независимо от того, в каком направлении сканирования она была зарегистрирована, после чего контроль сварного шва и околошовной зоны трубы завершается.
2. Способ ультразвукового контроля сварных швов труб по п. 1, отличающийся тем, что выполняется условие V2=-|V1| в направлении второго торца либо труба приводится в движение относительно ИМ.
3. Способ ультразвукового контроля сварных швов труб по п. 1, отличающийся тем, что при возвращении ИМ от второго торца трубы сканирование осуществляется с ускорением при условии V2>V1.
4. Система для осуществления способа УЗК сварных швов труб, содержащая измерительный модуль ИМ с находящимся на нем ультразвуковыми преобразователями УП, поворотные ролики ПР и систему автоматического управления процессом контроля, в свою очередь включающую программу управления сканированием ПУС и Управляющий Вычислительный Комплекс УВК, позволяющий, в частности, обрабатывать, демонстрировать и архивировать результаты ультразвукового контроля, отличающаяся тем, что ПУС для сканирования сварного шва дополнительно содержит программный блок ДПБ1, позволяющий часть трубы сканировать в одном направлении, а другую часть - в противоположном направлении, причем УВК дополнительно содержит программный блок ДПБ2, позволяющий «сшивать» данные и демонстрировать результаты контроля на общей дефектограмме, где каждая обнаруженная несплошность или иная особенность состояния участка трубы имеет однозначно определяемую протяженность и координату, независимо от того, в каком направлении сканирования она была зарегистрирована.
| US 3828609A, 13.08.1974 | |||
| US 8746070B2, 10.06.2014 | |||
| US 8344725B2, 01.01.2013 | |||
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ТРУБ | 2003 |
|
RU2248568C1 |
| Устройство для ультразвукового контроля труб | 1988 |
|
SU1649417A1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ КАЧЕСТВА ТРУБ | 2001 |
|
RU2209426C2 |

