Изобретение относится к эксплуатации и строительству сооружений, в частности к системам, позволяющим следить за состоянием элементов конструкций, их местоположением, состоянием сооружений, включающих такие элементы, а также вести мониторинг местоположения сооружений, в которых установлена такая система, относительно заданной системы координат.
В настоящее время известны системы, описанные в патентах RU 2140625 C1, RU 2163009 С2 и RU 2557343 С1, принцип работы которых основан на использовании микросейсмических данных. Эти системы позволяют вести наблюдение за вибрациями элементов конструкций и за счет системы математических алгоритмов делать вычисления, на основании которых можно делать выводы о состоянии как контролируемых элементов конструкции, так и всего сооружения.
Основными недостатками таких систем является невозможность наблюдения за медленными линейными и угловыми движениями элементов конструкций и самих сооружений.
Отсутствие таких данных не позволяет контролировать изменения в состоянии конструкции, которые происходят, например, при воздействии климатических условий, таких как увеличение циклов замораживания и оттаивания за год. Между тем, такие воздействия приводят к искажению геометрических форм элементов, например, изгибу или набуханию, что сказывается на их прочности. Или влиянию кратковременных динамических нагрузок, таких как прохождение поездов метрополитена под зданием, на геометрическое положение его элементов.
Известные системы не реагируют на медленное движение грунтов под сооружением, которое также приводит к смещению элементов конструкции. Особенно важен такой фактор в условиях плотной городской застройки с огромным множеством коммуникаций и подземных сооружений, расположенных как под зданием, так и в вблизи него.
В современном городе практически вся поверхность закрыта асфальтовым или гранитным покрытием. Это приводит к разжижению и размыванию грунтов, вследствие чего образуются карстовые ямы и начинают двигаться фундаменты зданий. Учитывая, что под зданиями находятся такие сооружения, как метрополитен, недопустимое смещение здания может привести к перераспределению нагрузки и обрушению его конструкций.
Известные системы не позволяют контролировать смещение элементов относительно их проектных положений. Особенно важен такой контроль в тоннелях в местах прохождения русел рек и обводненных грунтов.
Заявленная группа изобретений позволяет решить задачи при организации мониторинга большинства возможных изменений в конструкциях сооружений, а также создать системы глобального слежения за подвижками сооружений, в которых они установлены. Это позволит достичь таких технических результатов, как повышение безопасности эксплуатации зданий и сооружений, обеспечение возможности своевременного реагирования на изменения в конструкциях и их ремонта, сбор статистических данных о динамических нагрузках и подвижках грунтов для последующего их учета при проектировании.
Заявленные технические результаты достигаются способом неразрушающего контроля состояния конструкций, включающим измерение параметров движения, по меньшей мере, части контролируемого элемента конструкции и съем информации о таких движениях. Информация поступает, по меньшей мере, от одного измерительного модуля, установленного на элементе конструкции, обеспечивающего возможность измерения угловых и линейных смещений контролируемого элемента, после чего полученные данные анализируют на соответствие заданным параметрам.
Заданные параметры представляют собой допустимые значения смещения элемента.
В случае несоответствия полученных данных заданным значениям формируется сигнал, управляющий системой отключения устройства и/или устройств, вызывающих движение контролируемого элемента конструкции, и/или сигналом, управляющим системой оповещения о достижении заданных значений и/или превышении их, и/или системой закрытия доступа на сооружение, в котором контролируется элемент конструкции.
По меньшей мере, один модуль устанавливают в том месте элемента конструкции, где возможно наибольшее движение элемента конструкции, или в том месте, где движение элемента конструкции вызовет наибольшие риски нарушения целостности этого элемента конструкции или сооружения, в котором использован этот элемент. Место установки модуля выбирается или прогнозируется с учетом возможных факторов воздействия и/или реальных факторов воздействия.
Модулей устанавливают такое количество, которое позволяет контролировать все ответственные элементы конструкции или весь периметр контролируемого сооружения, или целостность всего сооружения, или смещение элемента конструкции или всего сооружения относительно земной поверхности или смещение элемента конструкции или всего сооружения относительно заданной системы координат.
Данные поступают постоянно или в только случае изменения контролируемых параметров.
Линейные и/или угловые смещения элемента конструкции измеряют относительно заданной системы координат.
Заявленные технические результаты достигаются системой неразрушающего для контроля состояния конструкций, включающей, по меньшей мере, один инерциальный измерительный модуль, предназначенный для установки на контролируемый элемент конструкции, позволяющий измерить угловые и линейные перемещения, по меньшей мере, того места, в котором смонтирован этот модуль, и обеспечивающий возможность передачи снятых данных, блок приема данных, на который поступают данные от, по меньшей мере, одного измерительного модуля, блок анализа поступивших данных на соответствие заданным параметрам, блок формирования сигнала, управляющего системой отключения устройства и/или устройств, вызывающих движение контролируемого элемента конструкции, и/или сигналом, управляющим системой оповещения о достижении заданных значений и/или превышении их, и/или системой закрытия доступа по меньшей мере на часть сооружения, в котором контролируется, по меньшей мере, один элемент конструкции в случае достижения и/или превышения заданных параметров.
Параметры движения определяют как линейные и/или угловые смещения элемента конструкции, характеризующиеся временными трендами, амплитудами и частотами.
Заданные параметры представляют собой допустимые значения смещения элемента.
По меньшей мере, один измерительный модуль устанавливают на ответственном элементе конструкции и/или, по меньшей мере, один измерительный модуль устанавливают в том месте элемента конструкции, в котором возможно наибольшее движение элемента конструкции и/или в том месте, где движение элемента конструкции вызовет наибольшие риски нарушения целостности этого элемента конструкции или сооружения, в котором использован этот элемент.
Место установки модуля выбирается с учетом возможных факторов воздействия и/или реальных факторов воздействия.
Модулей устанавливают такое количество, которое позволяет контролировать все ответственные элементы конструкции контролируемого сооружения или весь объем сооружения или целостность сооружения.
Блок анализа поступивших данных на соответствие заданным параметрам, обеспечивает возможность анализа информации, поступающей от нескольких модулей. При ее анализе учитывают погрешность показаний и/или дополнительные факторы, влияющие на параметры движения.
Данные в блок анализа поступают постоянно или в только случае изменения контролируемых параметров.
Данные от измерительного модуля передают по проводным и/или беспроводным каналам обмена информацией.
Инерциальный измерительный модуль представляет собой комбинацию из трех гироскопов и трех акселерометров, жестко закрепленных на общем корпусе таким образом, что их оси чувствительности образуют взаимно ортогональные трехгранники.
Гироскопы представляют собой лазерные гироскопы с вибрационной частотной подставкой или микромеханические гироскопы.
Акселерометры представляют собой кварцевые акселерометры.
Сервисная электроника модуля обеспечивает его функционирование и предварительную обработку информации.
Заявленные технические результаты достигаются способом слежения за местоположением сооружения, включающим измерение смещения контролируемого сооружения, входящего в состав сооружения, и съем информации о таких смещениях. Информация поступает, по меньшей мере, от одного измерительного модуля, установленного на элементе, входящем в состав сооружения, смещение которого указывает на смещение всего сооружения относительно первоначального положения в заданной системе координат, обеспечивающего возможность измерения линейных смещений относительно заданной системы координат, или обеспечивающего возможность измерения угловых смещений относительно заданной системы координат, или обеспечивающего возможность измерения линейных и угловых смещений относительно заданной системы координат, затем осуществляют обработку полученных данных с целью установления смещения сооружения относительно первоначального положения или относительно рядом расположенных сооружений или относительно заданных координат.
Измерительный модуль представляет собой инерциальный модуль, состоящий из, по меньшей мере, одного гироскопа.
Измерительных модулей установлено столько, что обеспечивается контроль положения сооружения в пространстве.
Заявленные технические результаты достигаются системой слежения за местоположением сооружения, включающей, по меньшей мере, один инерциальный измерительный модуль, предназначенный для установки, по меньшей мере, на одном элементе, входящим в состав сооружения, смещение которого указывает на смещение всего сооружения относительно первоначального положения в заданной системе координат, обеспечивающего возможность измерения линейных смещений относительно заданной системы координат, или обеспечивающего возможность измерения угловых смещений относительно заданной системы координат, или обеспечивающего возможность измерения линейных и угловых смещений относительно заданной системы координат, и обеспечивающий возможность передачи снятых данных, блок приема данных, на который поступают данные, по меньшей мере, от одного измерительного модуля, блок анализа поступивших данных, обеспечивающий обротку поступивших данных с целью установления смещения сооружения относительно первоначального положения или относительно рядом расположенных сооружений или относительно заданных координат.
Измерительные модули устанавливают, по меньшей мере, на двух рядом стоящих сооружениях.
Блок анализа поступивших данных, обеспечивает возможность анализа данных поступающих от нескольких измерительных модулей.
Данные от измерительного модуля передают по проводным и/или беспроводным каналам обмена информацией.
Инерциальный измерительный модуль представляет собой комбинацию из трех гироскопов и трех акселерометров жестко, закрепленных на общем корпусе, таким образом, что их оси чувствительности образуют взаимно ортогональные трехгранники.
Гироскопы представляют собой лазерные гироскопы с вибрационной частотной подставкой или микромеханические гироскопы.
Акселерометры представляют собой кварцевые акселерометры.
Сервисная электроника модуля обеспечивает его функционирование и предварительную обработку информации.
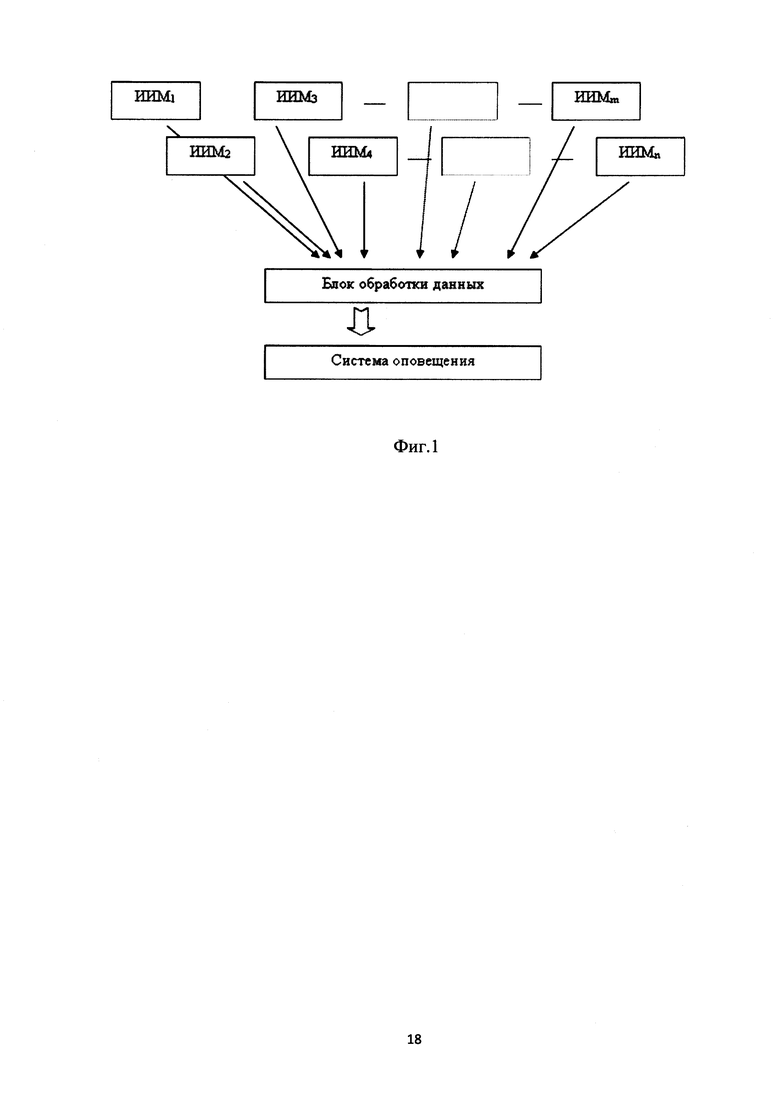
Фиг. 1 - Схема системы неразрушающего контроля состояния конструкций.
Изобретение осуществляют следующим образом.
На ответственные элементы конструкции сооружения, в местах, где вероятны наибольшие подвижки или искажения, устанавливают инерциальные измерительные модули, каждый из которых включает:
- акселерометры,
- гироскопы,
- сервисную электронику, обеспечивающую их работу,
- блок обработки данных, осуществляющий определение параметров линейного и углового движения (амплитуды и частоты);
- блок передачи данных и/или индикации, который осуществляет передачу информации в систему контроля в случае использования модуля в системе и/или индикации проведенных измерений в случае использования модуля как автономного средства контроля. Такие модули позволяют получать данные об угловых и линейных смещениях элемента, на который они установлены, относительно его первоначального положения в заданной системе координат.
Затем полученные данные от модулей, входящих в систему мониторинга, передаются на сервер, где осуществляют их обработку на условие соответствия заданным значениям, которые представляют собой данные о проектном положении элемента и недопустимом отклонении элемента от проектного положения.
Если данные разняться, то система реагирует на такое несоответствие и формируются сигналы, характеризующие текущее состояние объекта контроля и оповещающие о необходимости ремонта, а в случае недопустимого отклонения - об эвакуации людей. Может быть внедрена система, блокирующая доступ на аварийный объект или на часть этого объекта.
Пример реализации инерциального измерительного модуля.
Инерциальный измерительный модуль представляет собой комбинацию из трех гироскопов, например, лазерных с вибрационной частотной подставкой ЛГ-1, и трех акселерометров, например, кварцевых типа АК-15, жестко закрепленных на общем корпусе, таким образом, что их оси чувствительности образуют взаимно ортогональные трехгранники. Сервисная электроника модуля обеспечивает его функционирование и предварительную обработку информации.
Однако могут быть использованы и другие типы гироскопов и акселерометров, например, микромеханические. Тип гироскопов и акселерометров определяется необходимой точностью измерений и стоимостью системы.
Следует отметить, что существующие методы и средства контроля позволяют только констатировать факт уже произошедших изменений, а не само постепенное или резкое смещение элементов конструкций относительно проектного положения и их целостность. Это приводит к значительным трудовым и финансовым затратам при ремонте и эксплуатации таких конструкций. Кроме того, в настоящее время, инспекция конструкций проходит по времени, которое определено нормативными актами. Такой контроль не позволяет своевременно реагировать на изменения в конструкции здания или сооружения произошедшие, например, под воздействием климатический условий (в настоящее время в Москве циклы замораживания-оттаивания за год постоянно увеличиваются) или под воздействием ЧС (ураган, взрывная волна и т.п.).
Использование заявленной системы позволит осуществить мониторинг ресурса конструкции, что позволит отойти от существующей системы контроля по времени, установленному нормативными актами, и внедрить систему объективного контроля на основании фактического состояния конструкций. Это снизит эксплуатационные расходы, трудозатраты и повысит безопасность зданий и сооружений.
Особенно актуальна эта проблема в условиях современно мегаполиса, когда контроль состояния сооружений возложен на управляющие компании, добросовестная работа которых взывает сомнения. Такая система позволит проверяющим органам снимать показания, записанные в память электронного носителя информации с защищенным доступом, и принимать решения о выборе наказания компании нарушителю на основании объективных данных, которые можно учитывать в судебном разбирательстве.
В случае, если система устанавливается на такие элементы как фундамент или несущие колонны, обеспечивается возможность регистрации данных о смещениях здания относительно первоначального положения. Это указывает на то, что произошли подвижки грунтов. Соответственно, если есть такая возможность, то необходимо принять меры по усилению грунта или перераспределению нагрузки от здания, путем внесения изменений в конструкцию здания или исключению фактора, вызывающего такие нагрузки, например, хождение высокоскоростного лифта, а если нет, то демонтировать здание. Причем данные о средствах, вызывающих возникновения нагрузок, также косвенно регистрируются системой, т.к. путем несложных алгоритмов определяется характер динамических воздействий от каждого средства.
Внедрение такой системы актуально, например, для таких объектов как МГУ или «Алые паруса», т.к. такая система позволит с высокой точностью регистрировать ускорение сползания комплекса к реке. Обладание такими сведениями позволит своевременно увеличивать мощность работы холодильных установок, расположенных под такими проблемными объектами.
В настоящее время в Москве есть недостроенные объекты, которые невозможно довести до конца из-за отсутствия данных о возможных динамических воздействиях на конструкцию и их интенсивности. Система обеспечивает возможность получения данных о внешних динамических воздействиях, таких как ветровые возмущения и вибрация от проходящего транспорта, что особенно актуально в местах прохождения трамвайных путей и линий метрополитена. Причем система может одновременно накапливать данные о нагрузках, воздействующих на элемент, и геометрических искажениях контролируемых элементов и сооружений. На основании анализа этих данных формируются данные о кратковременных, среднесрочных и постоянных нагрузках, которые влияют на состояние элементов в этом районе. Учет таких данных при городском планировании и проектировании зданий позволит создать более надежную городскую систему и спланировать более комфортные условия для проживания жителей.
Кроме того, установка такой системы в подземных сооружениях позволит вести мониторинг за ее местоположением в пространстве, что обеспечит своевременное реагирование на смещения стыковочных узлов, например, таких, как коммуникационные отверстия или соединение мест переходов в подземных сооружениях.
Следует отметить, что все вышеперечисленные показатели система способна регистрировать постоянно и одновременно. Т.е. получаемый массив данных позволит постоянно наблюдать за происходящими изменениями. Это позволит реагировать на любую внештатную ситуацию в масштабах всего города и осуществлять прогноз последствий, вызванных внештатными ситуациями. Не говоря уже о том, что массив получаемой информации может быть использован для создания глобальной системы мониторинга за состоянием городских построек, с учетом влияния транспортных систем и других факторов, а также улучшить систему городского планирования, т.к. будут учтены воздействия, влияющие на комфортные условия нахождения в сооружениях людей.
В случае внедрения такой системы в большинство городских сооружений появится возможность снижения стоимости и материалоемкости строительства на основе определения реального коэффициента запаса прочности.
При создании системы связи между системами, установленными в разных городах, возможно измерение подвижек земной коры. Не исключена вероятность, что глобальная система мониторинга за подвижками контролируемых объектов будет способствовать прогнозированию землетрясений.
С помощью такой системы можно контролировать геометрическое положение элементов оборудования и машин, например, башенных кранов и аттракционов. Такой контроль позволит своевременно реагировать на нештатную ситуацию из-за чрезмерного их отклонения или внешнего воздействия.
Система применима для мониторинга зданий и сооружений, мостов, строительных кранов, аттракционов, военных объектов, объектов тепло-, газо-, электроснабжения, ядерных станций, плотин и других объектов.
Возможности предлагаемой системы не исчерпываются приведенным перечнем и сейчас изучены только те, которые были выявлены в процессе анализа существующих систем мониторинга состояния конструкций.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИЙ | 2017 |
|
RU2683369C2 |
| ИНЕРЦИАЛЬНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО С ЦИФРОВЫМ СРЕДСТВОМ УПРАВЛЕНИЯ | 2019 |
|
RU2731656C1 |
| СПОСОБ СБОРКИ КОЛЬЦЕВОГО РЕЗОНАТОРА ЛАЗЕРНОГО ГИРОСКОПА (ВАРИАНТЫ) | 2016 |
|
RU2626725C1 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ ПЕРЕМЕЩЕНИЙ И КОЛЕБАНИЙ ПОДВИЖНЫХ СТРУКТУР | 2014 |
|
RU2636412C2 |
| УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННЫХ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2403538C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2443978C1 |
| Устройство для оценки технического состояния конструкций | 2025 |
|
RU2839370C1 |
| СПОСОБ КОНТРОЛЯ ЛИНЕЙНЫХ И УГЛОВЫХ ОТКЛОНЕНИЙ ОТ ВЕРТИКАЛЬНОГО НАПРАВЛЕНИЯ ДЛЯ ДИСТАНЦИОННОГО МОНИТОРИНГА АНТЕННО-МАЧТОВЫХ СООРУЖЕНИЙ | 2011 |
|
RU2477454C1 |
| Бесплатформенная инерциальная навигационная система | 2021 |
|
RU2768616C1 |
| НАВИГАЦИОННАЯ СИСТЕМА И КОРПУС НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2430333C1 |
Изобретение относится к измерительной технике, а именно к средствам контроля состояния конструкций искусственных сооружений. Способ включает измерение параметров движения, по меньшей мере, части контролируемого элемента конструкции и съем информации о таких движениях. Информация поступает от, по меньшей мере, одного измерительного модуля, установленного на контролируемом элементе конструкции, обеспечивающего возможность измерения угловых и линейных смещений контролируемого элемента конструкции, затем полученные данные анализируют на соответствие заданным параметрам. При этом инерциальный измерительный модуль представляет собой комбинацию из трех гироскопов и трех акселерометров, жестко закрепленных на общем корпусе таким образом, что их оси чувствительности образуют взаимно ортогональные трехгранники, и включает блок обработки данных, осуществляющий определение параметров линейного и углового движения. Система включает по меньшей мере один инерциальный измерительный модуль, предназначенный для установки на контролируемый элемент конструкции, позволяющий измерить угловые и линейные перемещения по меньшей мере того места, в котором смонтирован этот модуль, и обеспечивающий возможность передачи снятых данных, блок приема данных, на который поступают данные от по меньшей мере одного измерительного модуля, блок анализа поступивших данных на соответствие заданным параметрам, блок формирования сигнала, управляющего системой отключения устройства и/или устройств, вызывающих движение контролируемого элемента конструкции, и/или сигналом, управляющим системой оповещения о достижении заданных значений и/или превышении их, и/или системой закрытия доступа по меньшей мере на часть сооружения, в котором контролируется по меньшей мере один элемент конструкции в случае достижения и/или превышения заданных параметров. Технический результат заключается в повышении безопасности эксплуатации зданий и сооружений, обеспечении возможности своевременного реагирования на изменения в конструкциях и их ремонта, сбор статистических данных о динамических нагрузках и подвижках грунтов для последующего их учета при проектировании. 2 н. и 19 з.п. ф-лы, 1 ил. 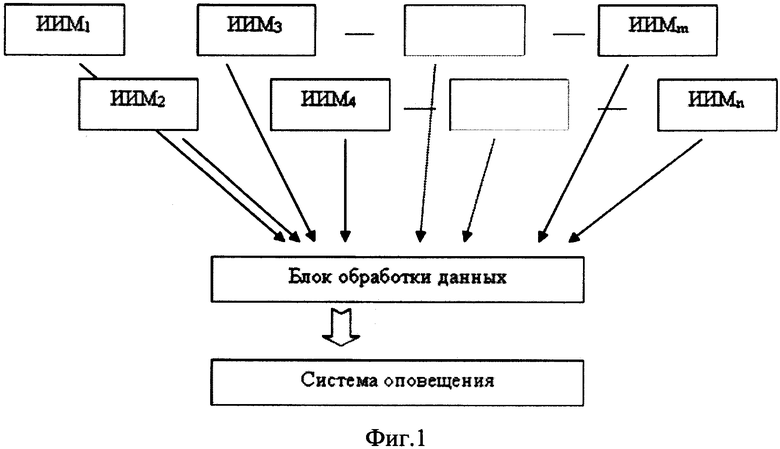
| Узловязатель | 1940 |
|
SU83617A2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРИЗНАКОВ И ЛОКАЛИЗАЦИИ МЕСТА ИЗМЕНЕНИЯ НАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ ЗДАНИЙ, СООРУЖЕНИЙ | 2014 |
|
RU2557343C1 |
| СИСТЕМА ВЫСОКОТОЧНОГО МОНИТОРИНГА СМЕЩЕНИЙ ИНЖЕНЕРНЫХ СООРУЖЕНИЙ | 2012 |
|
RU2496124C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЗАБОЙНЫХ СКВАЖИН | 2001 |
|
RU2204712C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕМПЕРАТУРНЫХ ЗАВИСИМОСТЕЙ МАСШТАБНЫХ КОЭФФИЦИЕНТОВ, СМЕЩЕНИЙ НУЛЯ И МАТРИЦ ОРИЕНТАЦИИ ОСЕЙ ЧУВСТВИТЕЛЬНОСТИ ЛАЗЕРНЫХ ГИРОСКОПОВ И МАЯТНИКОВЫХ АКСЕЛЕРОМЕТРОВ В СОСТАВЕ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА ПРИ СТЕНДОВЫХ ИСПЫТАНИЯХ | 2014 |
|
RU2566427C1 |
| СПОСОБ ВЫСТАВКИ ОСЕЙ ПОДВИЖНОГО ОБЪЕКТА | 2004 |
|
RU2320963C2 |

