Изобретение относится к области рычажных механизмов шагающих устройств.
Известны несколько типов механизмов для шагающих устройств.
Известен механизм Кланна, описание которого приведено в патенте: US 6260862 B1, Walking device, Joseph C. Klann. Механизм Кланна состоит из двух кривошипов, двух шатунов, коромысла и корпуса. Это шестизвенный механизм. Недостатком механизма Кланна является искусственная, а не природная траектория движения опоры, имеющая сложный геометрический вид. Траектория движения опоры в механизме Кланна характерна для цепляющих механизмов и насекомых, например, пауков, а не для шагающих машин в природном понимании траектории движения стопы человека или копыта животного. Шагающая машина с механизмом Кланна не будет совершать поступательного движения, будет резко вибрировать в вертикальном и горизонтальном направлениях, создавая дискомфорт для находящихся в ней людей и подвергая детали повышенным нагрузкам.
Известен механизм Тео Янсена, состоящий из двенадцати рычагов, который автор демонстрировал на своей лекции «Искусственные формы жизни» 21 мая 2014 года в рамках программы «Политех на Стрелке». Электронный ресурс: https://theoryandpractice.ru/videos/711-teo-yansen-iskusstvennye-formy-zhizni. Этот механизм тоже нельзя считать шагающим, потому что в траектории движения опоры отсутствует прямолинейный участок относительного перемещения, характерный для траектории стопы человека или копыта животного. Криволинейные траектории опоры характерны для насекомых, а с точки зрения механики являются цепляющими, а не шагающими. Основные назначения механизма Тео Янсена - реклама, развлечения, шоу бизнес, обучение моделированию, изучение сложного движения, но не создание промышленных образцов шагающей техники.
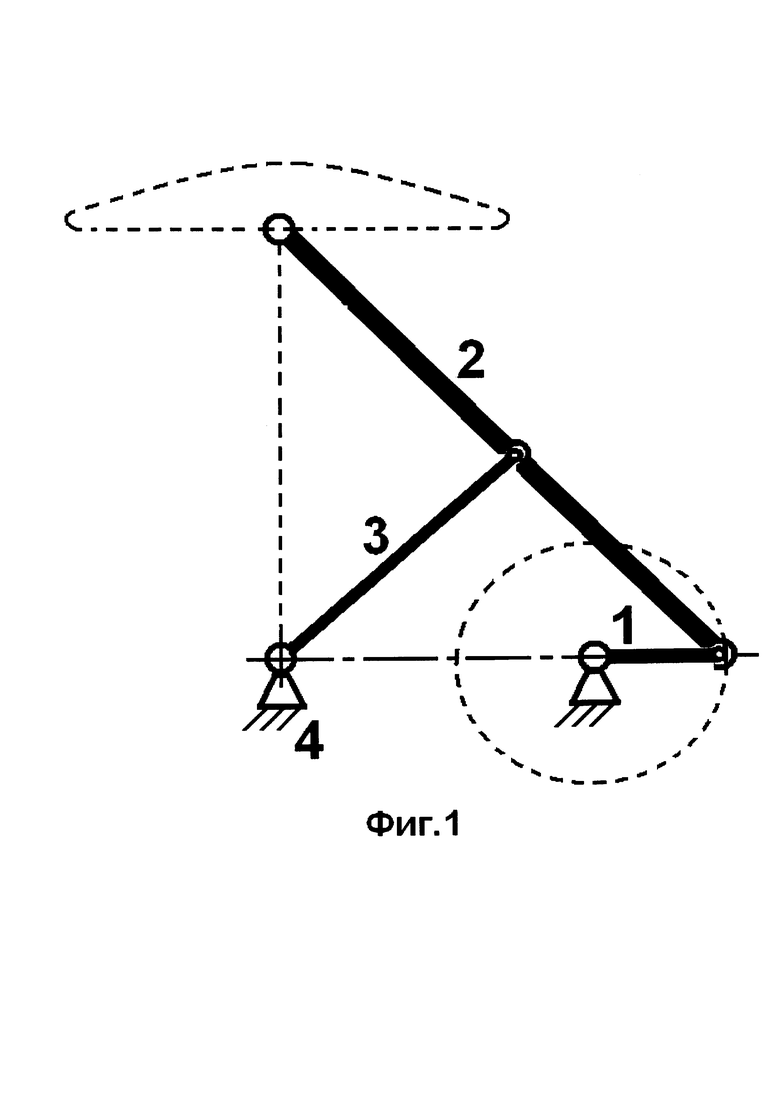
Известен четырехзвенный, если считать неподвижный корпус, лямбдаобразный механизм П.Л. Чебышева, состоящий из ведущего кривошипа 1, шатуна 2, коромысла 3 и корпуса 4, схема которого показана на фиг. 1. Описание этого механизма приведено в книге: Полное собрание сочинений П.Л. Чебышева. Том. 4. Теория механизмов. - Москва-Ленинград: Издательство Академии наук СССР, 1948 г. - С. 165, в статье П.Л. Чебышева в этой книге «О преобразовании вращательного движения в движение по некоторым линиям» на стр. 161-165, к которой имеется электронный режим доступа http://www.tcheb.ru/1. На фиг. 1 представлена кинематическая схема четырехзвенного лямбдаобразного механизма П.Л. Чебышева. Этот механизм позволяет получить природную траекторию движения стопы человека или копыта животного, однако недостатком этого механизма является верхнее расположение точки шатуна, которая описывает эту природную траекторию. Нельзя перевернуть механизм для получения нижнего расположения природной траектории, потому что рабочий прямолинейный участок траектории относительного движения опоры тоже перевернется и займет верхнее положение над дугообразным участком переноса стопы-опоры в процессе шага.
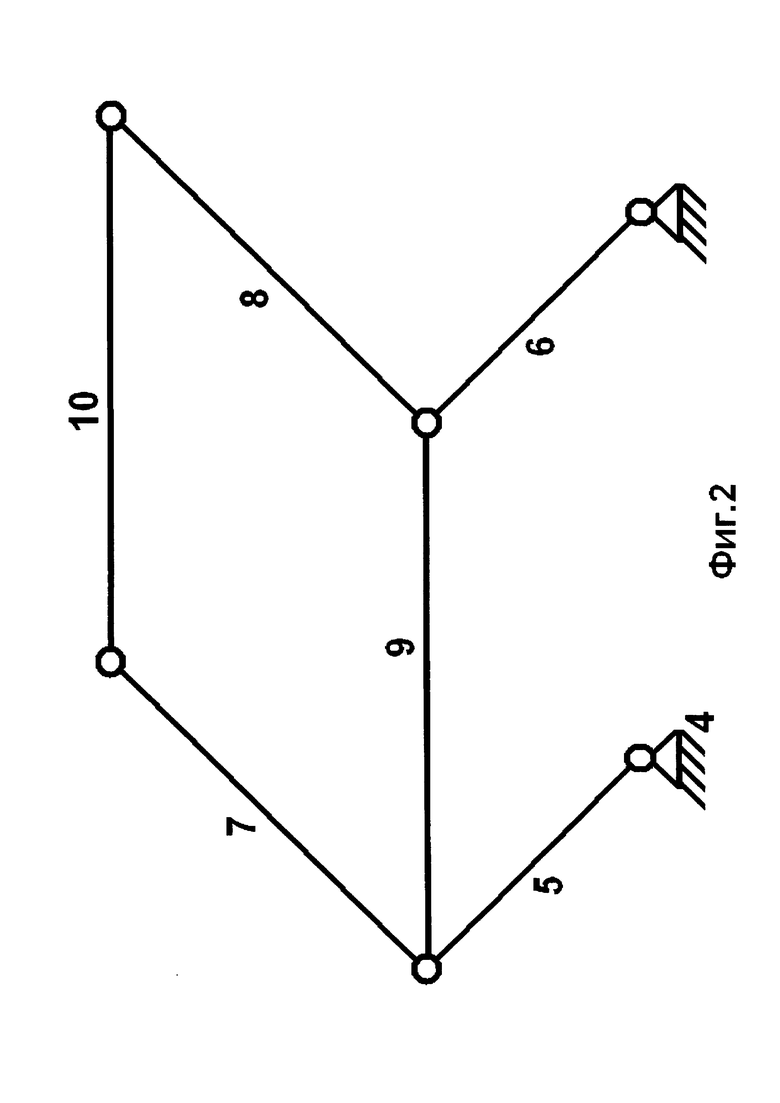
Известен механизм двойного шарнирного параллелограмма (Электронный ресурс «Математические этюды»: http://www.etudes.ru/ru/etudes/translation-rotation/), схема которого показана на фиг. 2. Этот механизм состоит из трех пар параллельных рычагов. Параллельные коромысла 5 и 6 закреплены одними концами шарнирно на неподвижном корпусе 4, а к другим концам коромысел шарнирно прикреплен шатун 9, параллельно которому с помощью шатунов 7 и 8 установлен на шарнирах шатун 10. Механизм двойного параллелограмма позволяет выполнять параллельный перенос траектории движения точки, потому что траектории концов шатунов 9 и 10 одинаковые.
Цель изобретения заключается в переносе траектории движения стопы-опоры шагающей машины из верхней части механизма в нижнюю часть.
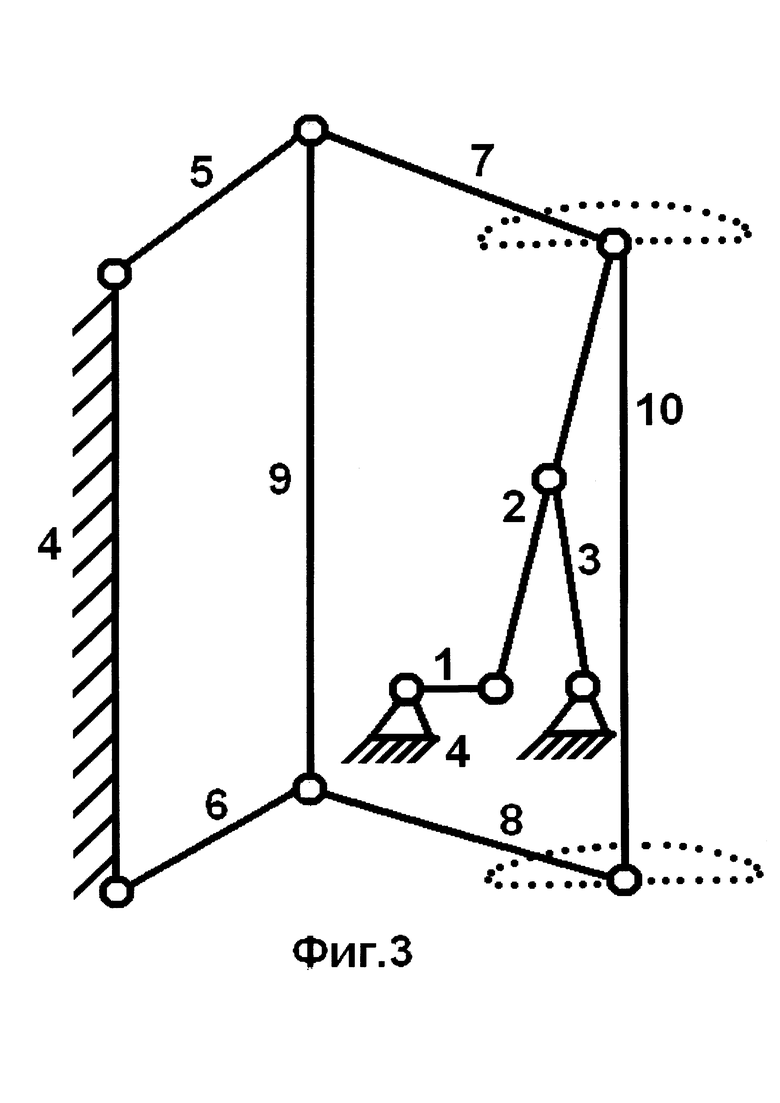
Основу предлагаемого устройства составляет известный лямбдаообразный механизм П.Л. Чебышева, состоящий из ведущего кривошипа 1, шатуна 2 и коромысла 3. Шатун 2 соединяется с коромыслом 3 в центральной части с помощью цилиндрического шарнира. Ведущий кривошип 1 и коромысло 3 закреплены шарнирно на неподвижном корпусе 4. При вращении ведущего кривошипа 1 верхняя точка шатуна 2 описывает природную траекторию движения стопы человека или копыта животного. Исключительно для реализации этой траектории П.Л. Чебышевым фактически был разработан этот четырехзвенный, если считать корпус 4, лямбдаобразный механизм. Четырехзвенный лямбдаобразный механизм П.Л. Чебышева выбран в качестве прототипа для предлагаемого нового устройства. Недостатком лямбдаобразного механизма П.Л. Чебышева является верхнее расположение природной траектории движения стопы-опоры шагающей машины. При этом самая простая схема шагающего механизма - это один лямбдаобразный механизм, в котором опора закрепляется в верхней части шатуна в его расчетной рабочей точке. Но на практике опора всегда должна располагаться снизу корпуса, под корпусом, причем значительно ниже корпуса шагающей машины. Получилось противоречие. С одной стороны, получена природная траектория движения стопы-опоры. С другой стороны, природная траектория движения стопы-опоры не может быть реализована на практике, потому что находится выше самой шагающей машины. Перенос природной траектории движения стопы-опоры ниже шагающей машины - это далеко не тривиальная задача. Например, в стопоходящей машине П.Л. Чебышева, показанной на Всемирной выставке в Париже в 1895 году, смещение природной траектории движения стопы-опоры на верхней точке шатуна лямбдаобразного механизма вниз выполнено добавлением еще одного такого же лямбдаобразного четырехзвенного механизма с последующей синхронизацией движения двух дополнительных удлиняющих вертикальных шатунов. Если учесть, что шагающая машина должна иметь не менее четырех опор, то необходимы четыре лямбдаобразных механизма, четыре вертикальных удлиняющих шатуна и пара связей этих шатунов для устранения дополнительной лишней степени свободы механизма. В новом устройстве предложено отказаться от второго лямбдаобразного механизма как необходимого дополнения к первому такому же механизму. В новом устройстве реализован перенос рабочей природной траектории стопы-опоры шагающей машины из верхней части машины в нижнюю часть машины с помощью двойного параллелограмма, показанного на фиг. 2 и предназначенного именно для этой цели. На фиг. 3 показана кинематическая схема предлагаемого механизма шагающей машины. Верхний шарнир шатуна 10 двойного параллелограмма соединен с верхней рабочей точкой шатуна 2 лямбдаобразного механизма, которая описывает природную траекторию стопы-опоры шагающей машины. Одинаковые шатуны 7 и 8 одними концами шарнирно соединены соответственно с верхним и нижним концами шатуна 10, а другими концами также шарнирно соединены соответственно с шатуном 9. Шатун 9 имеет такие же размеры, как шатун 10. Пары противоположно расположенных шатунов 7 и 8, 9 и 10 образуют первый шарнирный параллелограмм, считая от ведущего лямбдаобразного механизма с рычагами 1, 2, 3. К верхнему концу шатуна 9 и одновременно к левому концу шатуна 7 шарнирно крепится коромысло 5. Шатуны 7, 9 и коромысло 5 могут свободно вращаться друг относительно друга вокруг общих шарнирных осей. Точно также к нижнему концу шатуна 9 и к левому концу шатуна 8 шарнирно крепится коромысло 6. Шатуны 8, 9 и коромысло 6 могут свободно вращаться друг относительно друга вокруг общих шарнирных осей. Два одинаковых коромысла 5 и 6 образуют верхнюю и нижнюю пару второго шарнирного параллелограмма. Правой и левой сторонами второго шарнирного параллелограмма являются шатун 9 и неподвижный корпус 4, на котором установлена пара шарниров на таком же расстоянии друг от друга, как и на шатуне 9. Лямбдаобразный механизм формирует на верхней точке шатуна 2 природную траекторию стопы-опоры шагающего механизма, а двойной шарнирный параллелограмм, составленный из шатунов 7, 8, 9, 10, коромысел 5 и 6, корпуса 4 и соответствующих шарнирных связей, переносит эту природную траекторию стопы-опоры шагающей машины в нижнюю часть шагающей машины на нижнюю точку шатуна 10 двойного шарнирного параллелограмма. Нижняя точка шатуна 10 двойного шарнирного параллелограмма полностью повторяет движение верхней точки шатуна 10 по свойству двойного шарнирного параллелограмма, то есть также описывает природную траекторию стопы-опоры шагающей машины. Величина смещения природной траектории шага стопы-опоры шагающего механизма определяется исключительно длинами шатунов 9, 10 и расстоянием между шарнирами на корпусе 4 - все они должны быть одинаковыми. Длины одинаковых шатунов 7, 8 и одинаковых коромысел 5, 6 определяют смещение природной траектории шага в продольном направлении шагающей машины, поэтому не являются критичными для достижения цели предлагаемого устройства, то есть для смещения природной траектории шага стопы-опоры вниз, под корпус шагающей машины.
Существенным признаком предлагаемого устройства является совмещение лямбдаобразного механизма П.Л. Чебышева с двойным параллелограммом, позволяющее получить новый технический результат - перенос природной траектории шага стопы-опоры из верхней части механизма вниз на любое расстояние.
Технический результат заключается в точном переносе природной траектории движения стопы человека или копыта животного из верхней части лямбдаобразного четырехзвенного механизма П.Л. Чебышева в нижнюю часть механизма на произвольное расстояние, которое определяется конструкционными требования технического задания.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2801819C2 |
| Транспортное средство, в котором допускается возможность перевода движителя из дорожной конфигурации во внедорожную и наоборот | 2018 |
|
RU2734175C2 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2010 |
|
RU2422317C1 |
| НАПРАВЛЯЮЩИЙ РЫЧАЖНО-ШАРНИРНЫЙ МЕХАНИЗМ ДЛЯ ОДНОВРЕМЕННОГО ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ ДВУХ ТОЧЕК В ПРОТИВОПОЛОЖНЫХ НАПРАВЛЕНИЯХ | 2024 |
|
RU2840552C2 |
| Шагающий движитель транспортного средства | 1988 |
|
SU1625757A1 |
| САМОХОДНАЯ ШАГАЮЩАЯ ТЕЛЕЖКА МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНЫ | 2012 |
|
RU2496304C1 |
| ШАГАЮЩИЙ АППАРАТ НА ОСНОВЕ ПРЕОБРАЗОВАНИЯ ВОЗОБНОВЛЯЕМОЙ ЭНЕРГИИ В ЭНЕРГИЮ ДВИЖЕНИЯ | 2022 |
|
RU2800033C1 |
| СУДОВОЙ ВОЛНОВОЙ ДВИЖИТЕЛЬ | 2013 |
|
RU2542677C1 |
| Шагающий движитель транспортного средства | 1981 |
|
SU988635A1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2008 |
|
RU2368529C1 |
Изобретение относится к области рычажных механизмов шагающих устройств. Механизм шагающей машины содержит механизм формирования траектории шага стопы-опоры в верхней части механизма. С целью смещения траектории шага стопы-опоры из верхней части механизма в нижнюю часть механизма в него введен двойной шарнирный параллелограмм, два шарнира которого установлены на одной вертикали на общем корпусе с механизмом формирования траектории шага стопы-опоры на расстоянии, равном длине двух подвижных вертикальных шатунов двойного параллелограмма, а рабочая точка механизма формирования траектории шага стопы-опоры шарнирно соединена с верхним концом крайнего вертикального шатуна двойного параллелограмма. Обеспечивается точный перенос природной траектории шага стопы-опоры из верхней части механизма вниз на любое расстояние. 3 ил.
Механизм шагающей машины, содержащий механизм формирования траектории шага стопы-опоры в верхней части механизма, отличающийся тем, что с целью смещения траектории шага стопы-опоры из верхней части механизма в нижнюю часть механизма в него введен двойной шарнирный параллелограмм, два шарнира которого установлены на одной вертикали на общем корпусе с механизмом формирования траектории шага стопы-опоры на расстоянии, равном длине двух подвижных вертикальных шатунов двойного параллелограмма, а рабочая точка механизма формирования траектории шага стопы-опоры шарнирно соединена с верхним концом крайнего вертикального шатуна двойного параллелограмма.
| МНОГОКРАТНЫЙ ШАРНИРНЫЙ ПАРАЛЛЕЛОГРАММ | 2006 |
|
RU2331805C1 |
| САМОХОДНАЯ ШАГАЮЩАЯ ТЕЛЕЖКА МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНЫ | 2012 |
|
RU2496304C1 |
| ШАГАЮЩЕЕ УСТРОЙСТВО | 2016 |
|
RU2642020C2 |
| US 4527650 A1, 09.07.1985 | |||
| US 6478314 B1, 12.11.2002. | |||

