Изобретение относится к области робототехники и может быть использовано для автономного управления стабилизацией шагающего робота и экзоскелета в условиях естественной среды.
Известно создание робота Athlete с человекообразной искусственной скелетно-мышечной системой японским изобретателем Руяма Ниияма. Ноги робота содержат по семь наборов искусственных мускулов, приводимых в действие шестью пневматическими цилиндрами.
Каждый из этих искусственных мускулов имеет полный аналог в анатомии человеческого тела. Контактные датчики и тензорезисторы на ногах робота дают ему информацию о положении и состоянии его ног-пружин. К недостаткам относится не эффективная работа системы стабилизации в виде инерционных датчиков, установленных в верхней части корпуса робота, даже на ровной поверхности.
Источник информации: научная статья «A Biomechanical Approach for Open-loop Bipedal Running with a Musculoskeletal Athlete Robot», Руяма Ниияма, журнал "Cutting Edge of Robotics in Japan".
Известно создание робота BigDog американской компанией Boston Dinamics, имеющего четыре несущие конечности исполнительной механической системы. Робот BigDog способен перемещаться по пересеченной местности с грузом весом 50 килограммов.
Система стабилизации состоит из гироскопа, акселерометров и датчиков положения конечностей. Способ управления стабилизацией заключается в симметричном расположении стоп и их коррекции при нежелательном повышении скорости перемещения корпуса с учетом значений гироскопа. Недостатком является необходимость определения массы груза для равномерного его распределения по корпусу для равномерного распределения нагрузки по всем несущим конечностям.
Источник информации: научная статья «BigDog, the Rough-Terrain Quaduped Robot», компания Boston Dinamics, США, 08.04.2008 г.
Задачей изобретения является определение и коррекция положения центра масс для сохранения стабилизированного положения шагающего робота.
Это достигается тем, что разделяют управление расположением центра масс несущей механической системы и управление распределением центра масс по несущим конечностям исполнительной механической системы, определяют и корректируют центры масс при помощи тактильных датчиков, расположенных по периметру тактильных платформ.
На чертеже показана схема шагающего робота, содержащего несущую механическую систему 1, опирающуюся на тактильную платформу 2 при помощи шарнирного соединения 3. Тактильная платформа снабжена тактильными датчиками 4 по периметру. Положение несущей механической системы относительно тактильной платформы корректируется приводами 5. Тактильная платформа расположена на нижней части исполнительной механической части 6. Стопы нижних конечностей исполнительной механической части опираются на тактильные платформы 7, снабженные тактильными датчиками 8 по периметру. Положение нижних конечностей исполнительной механической части корректируется приводами 9. Управление роботом осуществляется блоком центрального программного управления 10, который направляет команды в блок управления стабилизацией несущей механической системы 11 и в блок управления стабилизацией исполнительной механической системы 12. Управление стабилизацией шагающего робота работает следующим образом. Блок управления стабилизацией несущей механической системы 11 и блок управления стабилизацией исполнительной механической системы 12 работают независимо, согласование их действий осуществляется блоком центрального программного управления 10.
Управление расположением центра масс несущей механической системы 11 начинается с ее настройки. Для этого устанавливаем под контролем измерительных устройств несущую механическую систему 11 в вертикальное положение. Полученные результаты с датчиков 4 тактильной платформы 2 вносятся в программу блока управления стабилизацией несущей механической системы 11, как постоянные значения F. При этом точка опоры шарнирного соединения 3 совпадает с центром масс несущей механической системы 12. При манипуляциях грузом верхними конечностями исполнительной механической системы или прикреплении груза к корпусу центр масс несущей механической системы смещается в сторону расположения груза. Значения датчиков 4 тактильной платформы 2, в направлении которых сместился центр масс несущей механической системы 11, уменьшаются. Корректируют положение несущей механической системы 11 относительно тактильной платформы 2 в направлении, противоположном направлению смещения центра масс несущей механической системы 11, до получения значений датчиков 4, равных постоянным значениям F. Таким образом, центр масс несущей механической системы 11 совпадет с точкой опоры шарнирного соединения 3.
Управление распределением центра масс по нижним конечностям исполнительной механической системы заключается в определении суммы значений V тактильных датчиков 8 тактильных платформ 7 стоп нижних конечностей. Данный результат делится на количество нижних конечностей, тем самым определяется значение L, которое должно быть распределено равномерно на обе конечности. Для равномерного распределения нагрузки по поверхности стоп значение L делится на количество тактильных датчиков 8 и производится коррекция приводами 9. Таким образом, центр масс по нижним конечностям исполнительной механической системы совпадет точкой опоры шарнирного соединения 3 несущей механической системы 1. Для выполнения шага роботу необходимо освободить от нагрузки одну ногу, для чего сумму значений V делят только на количество датчиков 8 одной стопы, производится коррекция приводами 9.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕСОПРОМЫШЛЕННЫЙ РОБОТ | 2003 |
|
RU2247019C2 |
| Способ управления движением четырехногого шагающего робота по пересеченной местности | 2023 |
|
RU2832498C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОДОЛЕНИЯ ПРЕПЯТСТВИЙ | 2014 |
|
RU2554270C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТОЧКИ НУЛЕВОГО МОМЕНТА ПРИ ХОДЬБЕ БЕЗ СГИБАНИЯ СТОПЫ | 2015 |
|
RU2638083C2 |
| НОГА ШАГАЮЩЕГО АППАРАТА | 2014 |
|
RU2594316C2 |
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ ДВИЖУЩЕЙСЯ СРЕДЫ | 2014 |
|
RU2599097C2 |
| ШАГАЮЩИЙ РОБОТ-НАНОПОЗИЦИОНЕР И СПОСОБ УПРАВЛЕНИЯ ЕГО ПЕРЕДВИЖЕНИЕМ | 2010 |
|
RU2540283C2 |
| ВЗРЫВОЗАЩИЩЕННЫЙ ШАГАЮЩИЙ РОБОТ | 2023 |
|
RU2832153C1 |
| Аппарат ортопедический на нижнюю конечность с микропроцессорным управлением | 2021 |
|
RU2793532C1 |
| Мобильный шагающий робот | 2023 |
|
RU2834558C1 |
Изобретение относится к области робототехники и может быть использовано для автономного управления стабилизацией шагающего робота и экзоскелета в условиях естественной среды. Способ заключается в том, что разделяют управление расположением центра масс несущей механической системы и управление распределением центра масс по несущим конечностям исполнительной механической системы, определяют и корректируют положение центра масс для сохранения стабилизированного положения шагающего робота с применением тактильных датчиков без использования гироскопа. 1 ил.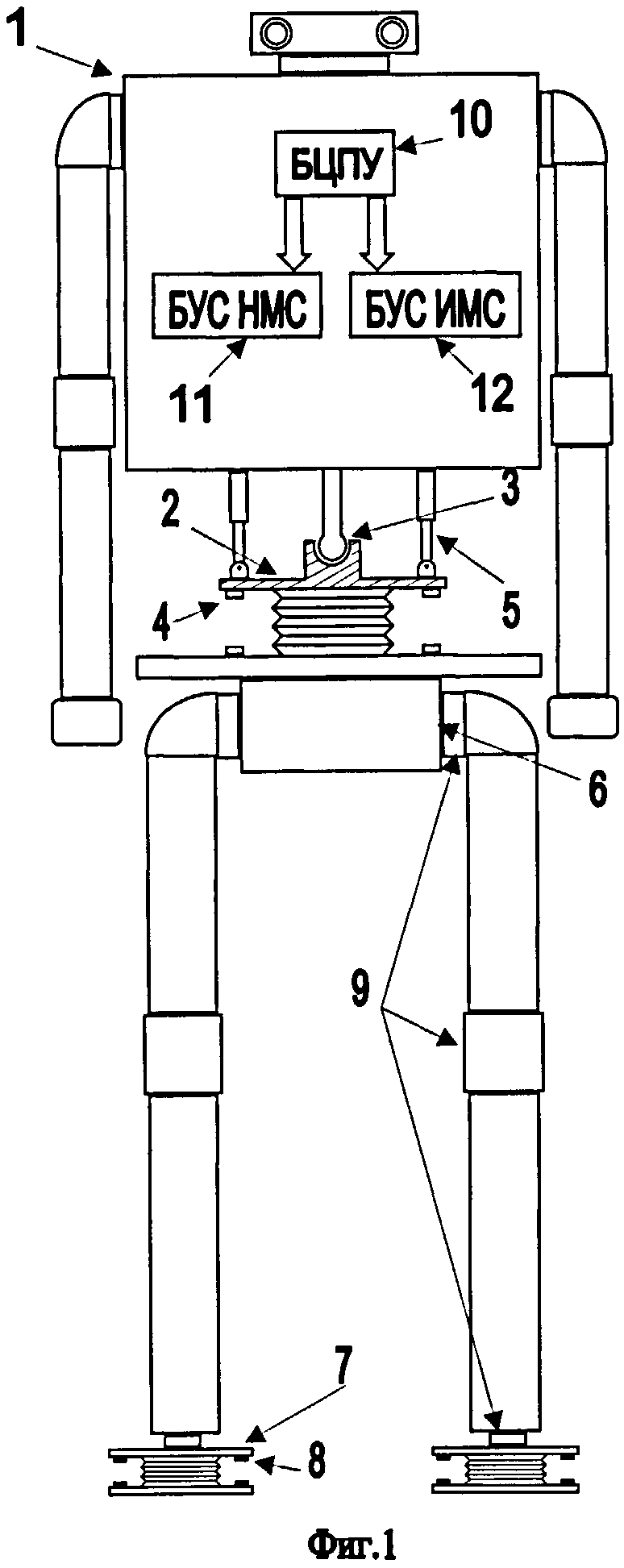
Способ управления стабилизацией шагающего робота, включающий осуществление настройки несущей механической системы робота и корректировку ее положения при смещении центра масс, отличающийся тем, что при настройке несущей механической системы ее устанавливают в вертикальное положение, и точка опоры шарнирного соединения, при помощи которого несущая механическая система опирается на тактильную платформу с расположенными по ее периметру тактильными датчиками, совпадает с центром масс несущей механической системы, осуществляют раздельное управление положением центра масс несущей механической системы робота и распределением центра масс по несущим конечностям исполнительной механической системы робота при согласовании их действий блоком центрального программного управления, при этом при смещении центра масс несущей механической системы корректируют ее положение относительно тактильной платформы, на которую она опирается, в направлении, противоположном направлению смещения до совпадения центра масс несущей механической системы с точкой опоры шарнирного соединения, а управление распределением центра масс по несущим конечностям исполнительной механической системы осуществляют равномерным распределением веса робота по поверхностям стоп несущих конечностей, опирающихся на тактильные платформы с расположенными по их периметру тактильными датчиками, до совпадения центра масс по несущим конечностям исполнительной механической системы с точкой опоры шарнирного соединения несущей механической системы, при этом для выполнения шага вес робота распределяют по несущим конечностям, не используемым для выполнения шага.
| Способ получения желатинообразных веществ в форме зерен или порошка | 1926 |
|
SU7262A1 |
| Шагающее устройство | 1981 |
|
SU1028550A1 |
| Способ сварки в стык | 1947 |
|
SU87719A1 |

