ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к авиационной технике, в частности к средствам и способам для визуализации изображений в воздухе, а именно к системе и способу для визуализации изображения, основанных на использовании управляемых беспилотных летательных аппаратов, а также к беспилотному летательному аппарату, который может быть использован в составе таких системы и способа для визуализации изображения.
УРОВЕНЬ ТЕХНИКИ
В настоящее время широко распространены пилотируемые и беспилотные летательные аппараты с различными конструкциями и движителями, используемые в уровне техники для визуализации изображений в воздухе. В частности, известны дроны, самолеты, вертолеты, планеры, аэростаты и иные виды воздушных судов, которые способны в той или иной мере осуществлять визуализацию изображений в воздухе, в частности способны нести дисплеи для отображения изображения, экраны для проецирования на них изображения, различные источники света для излучения света с разной длиной волны и/или способны распылять в воздухе различные аэрозоли или взвеси для проецирования на них изображения, и/или т.п.
Беспилотные летательные аппараты имеют следующие основные преимущества в сравнении с иными видами воздушных транспортных средств, которые могут быть использованы для визуализации изображения в воздухе: (i) возможность размещения таких беспилотных летательных аппаратов в непосредственной близости от области пространства, в которой предполагается использовать эти беспилотные летательные аппараты для визуализации изображений, что позволяет им оперативно занять надлежащие пространственные местоположения в заданной области пространства; (ii) возможность получения согласования от территориальных представителей власти (местной администрации) на использование таких беспилотных летательных аппаратов в городской черте для визуализации изображений, например рекламных статических или динамических изображений; (iii) возможность визуализации изображений в воздухе с использованием таких беспилотных летательных аппаратов на небольшом удалении от поверхности земли и, следовательно, зрителей, что позволяет зрителям четко разглядеть визуализируемые изображения; (iv) меньшая вероятность нанесения серьезных травм зрителям, наблюдающих визуализируемые изображения, или угроз жизни таких зрителей при возникновении неполадок в работе таких беспилотных летательных аппаратов, поломок таких беспилотных летательных аппаратов или непредвиденных столкновений беспилотных летательных аппаратов с иными воздушными или наземными объектами; и (v) меньшее шумовое загрязнение области пространства, в которой визуализируют изображения с использованием таких беспилотных летательных аппаратов, вследствие работы их воздушных движителей.
Применение же иных типов воздушных транспортных средств, таких как, например, самолеты, вертолеты, планеры, аэростаты или т.п., в ряде областей пространства, в особенности в городских условиях, для визуализации изображений имеет существенные ограничения. В частности, самолеты, вертолеты и иные аналогичные воздушные транспортные средства требуют наличия соответствующих взлетно-посадочных площадок, которые занимают существенную площадь, требуют получения разрешения территориальных представителей власти на использование таких воздушных транспортных средств в городской черте для визуализации изображений и могут быть значительно удалены от области пространства, в которой предполагается визуализировать изображения с использованием таких воздушных транспортных средств. Кроме того, габаритные размеры большинства воздушных транспортных средств, скорость их перемещения в воздухе и шум от их двигателей или воздушных движителей исключают возможность их использования в городской черте на небольшом удалении от зрителей, наблюдающих изображения, визуализируемые с использованием таких воздушных транспортных средств.
Например, в патенте США №10303415 (далее US 10303415), опубликованном 28 мая 2019 года, описана система для визуализации изображения, в состав которой входят беспилотные летательные аппараты, снабженные каждый отдельными средствами для визуализации изображения, и управляющее устройство, соединенное проводным или беспроводным образом с возможностью обмена данными с беспилотными летательными аппаратами и выполненное с возможностью направления указанных беспилотных летательных аппаратов в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении для формирования в воздухе составного дисплея из указанных дисплеев. Следует отметить, в системе для визуализации изображения, раскрытой в US 10303415, не предусмотрена возможность хранения или парковки беспилотных летательных аппаратов, используемых для визуализации изображения, в непосредственной близости от области пространства, в которой предполагается визуализировать указанное изображение в воздухе, что также усложняет задачу доставки беспилотных летательных аппаратов в указанную область пространства, усложняет задачу замены или восполнения запаса хода беспилотных летательных аппаратов, задействованных в осуществлении процесса визуализации изображения, и удлиняет по времени процесс формирования составного дисплея в воздухе с использованием таких беспилотных летательных аппаратов.
Таким образом, для массового внедрения беспилотных летательных аппаратов для визуализации изображений в заданной области пространства, в особенности в городской черте, необходимо по меньшей мере решить актуальную задачу, связанную с хранением или парковкой таких беспилотных летательных аппаратов в непосредственной близости от области пространства (в том числе в области пространства пределах городской черты), в которой предполагается визуализировать изображение в воздухе с использованием таких беспилотных летательных аппаратов, или с доставкой таких беспилотных летательных аппаратов в указанную область пространства.
Так, в патенте США №10370101 (далее US 10370101), опубликованном 18 мая 2017 года, описана система для визуализации изображения, в состав которой входят беспилотные летательные аппараты, снабженные каждый отдельными средствами визуализации изображения, парковочные станция, в которых размещены указанные беспилотные летательные аппараты, и управляющее устройство, соединенное с возможностью обмена данными с беспилотными летательными аппаратами и выполненное с возможностью направления указанных беспилотных летательных аппаратов в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении для формирования в воздухе составного дисплея из указанных дисплеев.
Несмотря на то, что в системе для визуализации изображения, раскрытой в US 10370101, по меньшей мере частично решена вышеописанная задача хранения или парковки беспилотных летательных аппаратов, используемых для визуализации изображения, указанные беспилотные летательные аппараты согласно US 10370101 способны лишь зависать в воздухе с обеспечением сохранения своих пространственных положений в воздухе и, следовательно, сохранения пространственного положения составного дисплея с визуализируемым на нем изображением, что усложняет возможность замены по меньшей мере одного из беспилотных летательных аппаратов, средства визуализации изображения которых задействованы в визуализации изображения на составном дисплее, без ухудшения качества визуализируемого изображения (в частности, например, без временного пропадания по меньшей мере части визуализируемого изображения, соответствующей средствам визуализации изображения, относящимся к заменяемому беспилотному летательному аппарату), и/или усложняет возможность перемещения составного дисплея в воздухе без ухудшения качества визуализируемого изображения (в частности, например, без временного пропадания по меньшей мере части визуализируемого изображения, соответствующей средствам визуализации изображения, относящимся к перемещаемым беспилотным летательным аппаратам, или без временного прерывания показа визуализируемого изображения на период времени, соответствующий времени перестроения беспилотных летательных аппаратов для изменения пространственного положения составного дисплея, образованного из их средств визуализации изображения).
Таким образом, основной недостаток известной системы для визуализации изображения, раскрытой в US 10370101, заключается в возможности потери качества изображения, визуализируемого на составной дисплее, при осуществлении замены по меньшей мере одного из беспилотных летательных аппаратов, средства визуализации изображения которых задействованы в визуализации изображения на составном дисплее, и/или в случае возникновения необходимости в перемещении в воздухе составного дисплея и, следовательно, изображения, визуализируемого на указанном составном дисплее.
Таким образом, очевидна потребность в дальнейшем совершенствовании известных систем для визуализации изображений, в частности для сохранения качества изображения, визуализируемого на составном дисплее, формируемом из средств визуализации изображения отдельных беспилотных летательных аппаратов, при перемещении в воздухе указанного составного дисплея и визуализируемого на нем изображения и при замене по меньшей мере одного из указанных беспилотных летательных аппаратов.
Следовательно, техническая проблема, решаемая настоящим изобретением, состоит в создании системы для визуализации изображения, в которой по меньшей мере частично устранен хотя бы один из обозначенных выше недостатков известной системы для визуализации изображения, заключающихся в повышенной вероятности ухудшения качества изображения при осуществлении замены по меньшей мере одного из беспилотных летательных аппаратов, средства визуализации изображения которых задействованы в визуализации изображения на составном дисплее, и/или при перемещении указанного составного дисплея с визуализируемым на нем изображением в воздухе.
РАСКРЫТИЕ
Задача настоящего изобретения состоит в создании системы для визуализации изображения, решающей по меньшей мере одну из обозначенных выше проблем известного уровня техники, а также в расширении арсенала средств для визуализации изображений.
Поставленная задача решена в первом аспекте настоящего изобретения благодаря тому, что в предложенной системе для визуализации изображения, содержащей: (i) одну или более парковочных станций; (ii) беспилотные летательные аппараты, которые размещены в парковочных станциях и каждый из которых снабжен по меньшей мере одним дисплеем; и (iii) управляющее устройство, соединенное с возможностью обмена данными с беспилотными летательными аппаратами и выполненное с возможностью направления по меньшей мере части из указанных беспилотных летательных аппаратов по меньшей мере из одной парковочной станции из указанных парковочных станций в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с заданной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного составного дисплея из указанных дисплеев, при этом (a) управляющее устройство выполнено с возможностью выдачи данных об изображении на указанные направленные беспилотные летательные аппараты с обеспечением возможности отображения указанного изображения на указанном составном дисплее, а (b) беспилотные летательные аппараты, дисплеи который формируют указанный составной дисплей, образуют по меньшей мере одну подвижную цепочку беспилотных летательных аппаратов в составе указанного составного дисплея.
Кроме того, поставленная задача решена во втором аспекте настоящего изобретения благодаря тому, что предложенная система для визуализации изображения содержит: (i) одну или более парковочных станций; (ii) беспилотные летательные аппараты, используемые указанным транспортным средством; (iii) управляющее устройство, соединенное с возможностью обмена данными с беспилотными летательными аппаратами и выполненное с возможностью направления по меньшей мере части из указанных беспилотных летательных аппаратов из парковочных станций в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с заданной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного дисплея из указанных источников света, при этом (a) каждый из источников света соответствует по меньшей мере одному пикселу указанного дисплея, (b) управляющее устройство выполнено с возможностью выдачи данных об изображении на беспилотные летательные аппараты с обеспечением возможности изменения длины волны излучения источников света указанных беспилотных летательных аппаратов для отображения указанного изображения на указанном сформированном дисплее, а (c) беспилотные летательные аппараты, экраны которых формируют указанный составной экран, образуют по меньшей мере одну подвижную цепочку беспилотных летательных аппаратов в составе указанного сформированного дисплея.
Кроме того, поставленная задача решена в третьем аспекте настоящего изобретения благодаря тому, что предложенная система для визуализации изображения содержит: (i) одну или более парковочных станций; (ii) беспилотные летательные аппараты, которые размещены в парковочных станциях и каждый из которых снабжен по меньшей мере одним экраном; (iii) проекционное устройство; и (iv) управляющее устройство, соединенное с возможностью обмена данными с беспилотными летательными аппаратами и выполненное с возможностью направления по меньшей мере части из указанных беспилотных летательных аппаратов по меньшей мере из одной парковочной станции из указанных парковочных станций в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с заданной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного составного экрана из указанных экранов, при этом (a) управляющее устройство выполнено с возможностью выдачи данных об изображении на указанное проекционное устройство с обеспечением возможности проецирования указанного изображения на указанном составном экране, а (b) беспилотные летательные аппараты, экраны которых формируют указанный составной экран, образуют по меньшей мере одну подвижную цепочку беспилотных летательных аппаратов в составе указанного составного экрана.
Кроме того, поставленная задача решена в четвертом аспекте настоящего изобретения благодаря тому, что предложенная система для визуализации изображения содержит: (i) одну или более парковочных станций; (ii) беспилотные летательные аппараты, которые размещены в парковочных станциях и каждый из которых имеет корпус или каркас; (iii) проекционное устройство; (iv) управляющее устройство, соединенное с возможностью обмена данными с беспилотными летательными аппаратами и выполненное с возможностью направления по меньшей мере части из указанных беспилотных летательных аппаратов по меньшей мере из одной парковочной станции из указанных парковочных станций в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с заданной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного экрана из указанных корпусов или каркасов беспилотных летательных аппаратов, при этом (a) управляющее устройство выполнено с возможностью выдачи данных об изображении на указанное проекционное устройство с обеспечением возможности проецирования указанного изображения на указанном сформированном экране, а (b) беспилотные летательные аппараты, корпус или каркасы которых формируют указанный экран, образуют по меньшей мере одну подвижную цепочку беспилотных летательных аппаратов в составе указанного сформированного экрана.
Кроме того, поставленная задача решена в пятом аспекте настоящего изобретения благодаря тому, что предложенная система для визуализации изображения содержит: (i) одну или более парковочных станций; (ii) беспилотные летательные аппараты, которые размещены в парковочных станциях и каждый из которых снабжен по меньшей мере одним источником белого света, выполненным с возможностью излучения света белого цвета, и по меньшей мере одним управляемым источником света, выполненным с возможностью излучения света с изменяемой длиной волны; и (iii) управляющее устройство, соединенное с возможностью обмена данными с беспилотными летательными аппаратами и выполненное с возможностью направления по меньшей мере части из указанных беспилотных летательных аппаратов из парковочных станций в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с заданной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного дисплея из указанных источников света, при этом (a) каждый из источников света соответствует по меньшей мере одному пикселу указанного сформированного дисплея, (b) управляющее устройство выполнено с возможностью выдачи данных об изображении на беспилотные летательные аппараты с обеспечением возможности излучения света белого цвета указанным источником белого света и возможности изменения длины волны излучения указанных управляемых источников света беспилотных летательных аппаратов для отображения указанного изображения на указанном дисплее, а (c) беспилотные летательные аппараты, источники света которых формируют указанный дисплей, образуют по меньшей мере одну подвижную цепочку беспилотных летательных аппаратов в составе указанного сформированного дисплея.
Кроме того, поставленная задача решена в шестом аспекте настоящего изобретения благодаря тому, что предложенная система для визуализации изображения содержит: (i) одну или более парковочных станций; (ii) беспилотные летательные аппараты, которые размещены в парковочных станциях и каждый из которых снабжен по меньшей мере одним экраном и проекционным устройством; и (iii) управляющее устройство, соединенное с возможностью обмена данными с беспилотными летательными аппаратами и выполненное с возможностью направления по меньшей мере части из указанных беспилотных летательных аппаратов по меньшей мере из одной парковочной станции из указанных парковочных станций в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с заданной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного составного экрана из указанных экранов, при этом (a) управляющее устройство выполнено с возможностью выдачи данных об изображении на указанные проекционные устройства беспилотных летательных аппаратов с обеспечением возможности проецирования указанного изображения на указанном составном экране, а (b) беспилотные летательные аппараты, экраны которых формируют указанный составной экран, образуют по меньшей мере одну подвижную цепочку беспилотных летательных аппаратов в составе указанного составного экрана.
Кроме того, поставленная задача решена в седьмом аспекте настоящего изобретения благодаря тому, что предложенная система для визуализации изображения содержит: (i) одну или более парковочных станций; (ii) беспилотные летательные аппараты, которые размещены в парковочных станциях, причем каждый из указанных беспилотных летательных аппаратов имеет корпус или каркас и снабжен проекционным устройством; и (iii) управляющее устройство, соединенное с возможностью обмена данными с беспилотными летательными аппаратами и выполненное с возможностью направления по меньшей мере части из указанных беспилотных летательных аппаратов по меньшей мере из одной парковочной станции из указанных парковочных станций в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с заданной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного экрана из указанных корпусов или каркасов беспилотных летательных аппаратов, при этом (a) управляющее устройство выполнено с возможностью выдачи данных об изображении на указанные проекционные устройства беспилотных летательных аппаратов с обеспечением возможности проецирования указанного изображения на указанном сформированном экране, а (b) беспилотные летательные аппараты, корпус или каркасы которых формируют указанный экран, образуют по меньшей мере одну подвижную цепочку беспилотных летательных аппаратов в составе указанного сформированного экрана.
Кроме того, поставленная задача решена в восьмом аспекте настоящего изобретения благодаря тому, что предложенный способ визуализации изображения включает следующие этапы, согласно которым: (i) выдают навигационные команды и заданную модель построения беспилотных летательных аппаратов на беспилотные летательные аппараты, каждый из которых снабжен по меньшей мере одним дисплеем; (ii) в ответ на указанные навигационные команды направляют указанные беспилотные летательные аппараты в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с указанной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного составного дисплея из указанных дисплеев; (iii) выдают данные о статическом или динамическом изображении на беспилотные летательные аппараты с обеспечением возможности отображения указанного изображения на указанном составном дисплее; и (iv) выдают навигационные команды на указанные беспилотные летательные аппараты, дисплеи которых формируют указанный составной дисплей, с обеспечением возможности их перемещения в составе указанного составного дисплея с образованием по меньшей мере одной подвижной цепочки беспилотных летательных аппаратов.
Кроме того, поставленная задача решена в девятом аспекте настоящего изобретения благодаря тому, что предложенный способ визуализации изображения включает следующие этапы, согласно которым: (i) выдают навигационные команды и заданную модель построения беспилотных летательных аппаратов на беспилотные летательные аппараты, каждый из которых снабжен по меньшей мере двумя управляемыми источниками света, каждый из которых выполнен с возможностью излучения света с изменяемой длиной волны; (ii) в ответ на указанные навигационные команды направляют указанные беспилотные летательные аппараты в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с указанной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного дисплея из указанных источников света, каждый из которых соответствует по меньшей мере одному пикселу указанного дисплея; (iii) выдают данные о статическом или динамическом изображении на беспилотные летательные аппараты с обеспечением возможности изменения длины волны излучения источников света указанных беспилотных летательных аппаратов для отображения указанного изображения на указанном сформированном дисплее; и (iv) выдают навигационные команды на указанные беспилотные летательные аппараты, источники света которых формируют указанный дисплей, с обеспечением возможности их перемещения в составе указанного сформированного дисплея с образованием по меньшей мере одной подвижной цепочки беспилотных летательных аппаратов.
Кроме того, поставленная задача решена в десятом аспекте настоящего изобретения благодаря тому, что предложенный способ визуализации изображения включает следующие этапы, согласно которым: (i) выдают навигационные команды и заданную модель построения беспилотных летательных аппаратов на беспилотные летательные аппараты, каждый из которых снабжен по меньшей мере одним источником белого света, выполненным с возможностью излучения света белого цвета, и по меньшей мере одним управляемым источником света, выполненным с возможностью излучения света с изменяемой длиной волны; (ii) в ответ на указанные навигационные команды направляют указанные беспилотные летательные аппараты в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с указанной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного дисплея из указанных источников света, каждый из которых соответствует по меньшей мере одному пикселу указанного дисплея; (iii) выдают данные о статическом или динамическом изображении на беспилотные летательные аппараты с обеспечением возможности излучения света белого цвета указанным источником белого света и возможности изменения длины волны излучения указанных управляемых источников света беспилотных летательных аппаратов для отображения указанного изображения на указанном сформированном дисплее; и (iv) выдают навигационные команды на указанные беспилотные летательные аппараты, источники света которых формируют указанный дисплей, с обеспечением возможности их перемещения в составе указанного сформированного дисплея с образованием по меньшей мере одной подвижной цепочки беспилотных летательных аппаратов.
Кроме того, поставленная задача решена и в одиннадцатом аспекте настоящего изобретения благодаря тому, что предложенный беспилотный летательный аппарат содержит: (i) корпус, в котором установлен по меньшей мере один воздушный движитель, обеспечивающий возможность перемещения беспилотного летательного аппарата по воздуху; (ii) по меньшей мере два управляемых источника света, которые установлены в корпусе и каждый из которых выполнен с возможностью излучения света с изменяемой длиной волны с обеспечением возможности подсвечивания или освещения указанного корпуса; и (iii) модуль управления, функционально соединенный с указанными источниками света с обеспечением возможности изменения длины волны излучения указанных источников света для отображения по меньшей мере части статического или динамического изображения посредством указанных источников света, при этом (a) модуль управления обеспечивает возможность приема навигационных команд перемещения указанного беспилотного летательного аппарата в составе подвижной цепочки беспилотных летательных аппаратов.
Кроме того, поставленная задача решена в двенадцатом аспекте настоящего изобретения благодаря тому, что предложенный способ визуализации изображения включает следующие этапы, согласно которым: (i) выдают навигационные команды и заданную модель построения беспилотных летательных аппаратов на беспилотные летательные аппараты, каждый из которых снабжен по меньшей мере одним экраном; (ii) в ответ на указанные навигационные команды направляют указанные беспилотные летательные аппараты по меньшей мере из одной парковочной станции в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с указанной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного составного экрана из указанных экранов; (iii) выдают данные о статическом или динамическом изображении на проекционное устройство с обеспечением возможности проецирования указанного изображения на указанном составном экране; и (iv) выдают навигационные команды на указанные беспилотные летательные аппараты, экраны которых формируют указанный составной экран, с обеспечением возможности их перемещения в составе указанного составного экрана с образованием по меньшей мере одной подвижной цепочки беспилотных летательных аппаратов.
Кроме того, поставленная задача решена в тринадцатом аспекте настоящего изобретения благодаря тому, что предложенный способ визуализации изображения включает следующие этапы, согласно которым: (i) выдают навигационные команды и заданную модель построения беспилотных летательных аппаратов на беспилотные летательные аппараты, каждый из которых снабжен корпусом или каркасом; (ii) в ответ на указанные навигационные команды направляют указанные беспилотные летательные аппараты по меньшей мере из одной парковочной станции в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с указанной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного экрана из указанных корпусов или каркасов; (iii) выдают данные о статическом или динамическом изображении на проекционное устройство с обеспечением возможности проецирования указанного изображения на указанном экране; и (iv) выдают навигационные команды на указанные беспилотные летательные аппараты, корпуса или каркасы которых формируют указанный экран, с обеспечением возможности их перемещения в составе указанного сформированного экрана с образованием по меньшей мере одной подвижной цепочки беспилотных летательных аппаратов.
Кроме того, поставленная задача решена в четырнадцатом аспекте настоящего изобретения благодаря тому, что предложенный способ визуализации изображения включает следующие этапы, согласно которым: (i) выдают навигационные команды и заданную модель построения беспилотных летательных аппаратов на беспилотные летательные аппараты, каждый из которых снабжен по меньшей мере одним источником белого света, выполненным с возможностью излучения света белого цвета, и по меньшей мере одним управляемым источником света, выполненным с возможностью излучения света с изменяемой длиной волны; (ii) в ответ на указанные навигационные команды направляют указанные беспилотные летательные аппараты по меньшей мере из одной парковочной станции в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с указанной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного дисплея из указанных источников света; (iii) выдают данные о статическом или динамическом изображении на указанные беспилотные летательные аппараты с обеспечением возможности излучения света белого цвета указанными источниками белого света и возможности изменения длины волны излучения указанных управляемых источников света беспилотных летательных аппаратов для отображения указанного изображения на указанном дисплее; и (iv) выдают навигационные команды на указанные беспилотные летательные аппараты, источники света которых формируют указанный дисплей, с обеспечением возможности их перемещения в составе указанного сформированного дисплея с образованием по меньшей мере одной подвижной цепочки беспилотных летательных аппаратов.
Кроме того, поставленная задача решена в пятнадцатом аспекте настоящего изобретения благодаря тому, что предложенный способ визуализации изображения включает следующие этапы, согласно которым: (i) выдают навигационные команды и заданную модель построения беспилотных летательных аппаратов на беспилотные летательные аппараты, каждый из которых снабжен по меньшей мере одним экраном и проекционным устройством; (ii) в ответ на указанные навигационные команды направляют указанные беспилотные летательные аппараты по меньшей мере из одной парковочной станции в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с указанной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного составного экрана из указанных экранов; (iii) выдают данные о статическом или динамическом изображении на проекционные устройства беспилотных летательных аппаратов с обеспечением возможности проецирования указанного изображения на указанном составном экране; и (iv) выдают навигационные команды на указанные беспилотные летательные аппараты, экраны которых формируют указанный составной экран, с обеспечением возможности их перемещения в составе указанного составного экрана с образованием по меньшей мере одной подвижной цепочки беспилотных летательных аппаратов.
Кроме того, поставленная задача решена в шестнадцатом аспекте настоящего изобретения благодаря тому, что предложенный способ визуализации изображения включает следующие этапы, согласно которым: (i) выдают навигационные команды и заданную модель построения беспилотных летательных аппаратов на беспилотные летательные аппараты, каждый из которых снабжен корпусом или каркасом и проекционным устройством; (ii) в ответ на указанные навигационные команды направляют указанные беспилотные летательные аппараты по меньшей мере из одной парковочной станции в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с указанной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного экрана из указанных корпусов или каркасов беспилотных летательных аппаратов; (iii) выдают данные о статическом или динамическом изображении на проекционные устройства беспилотных летательных аппаратов с обеспечением возможности проецирования указанного изображения на указанном экране; и (iv) выдают навигационные команды на указанные беспилотные летательные аппараты, корпуса или каркасы которых формируют указанный экран, с обеспечением возможности их перемещения в составе указанного сформированного экрана с образованием по меньшей мере одной подвижной цепочки беспилотных летательных аппаратов.
Система для визуализации изображения согласно первому аспекту настоящего изобретения, система для визуализации изображения согласно второму аспекту настоящего изобретения, система для визуализации изображения согласно третьему аспекту настоящего изобретения, система для визуализации изображения согласно четвертому аспекту настоящего изобретения, система для визуализации изображения согласно пятому аспекту настоящего изобретения, система для визуализации изображения согласно шестому аспекту настоящего изобретения, система для визуализации изображения согласно седьмому аспекту настоящего изобретения, система для визуализации изображения согласно восьмому аспекту настоящего изобретения, способ визуализации изображений согласно девятому аспекту настоящего изобретения, способ визуализации изображений согласно девятому аспекту настоящего изобретения, способ визуализации изображений согласно десятому аспекту настоящего изобретения, беспилотный летательный аппарат согласно одиннадцатому аспекту настоящего изобретения, способ визуализации изображений согласно двенадцатому аспекту настоящего изобретения, способ визуализации изображений согласно тринадцатому аспекту настоящего изобретения, способ визуализации изображений согласно четырнадцатому аспекту настоящего изобретения, способ визуализации изображений согласно пятнадцатому аспекту настоящего изобретения и способ визуализации изображений согласно шестнадцатому аспекту настоящего изобретения обеспечивают каждый технический результат, заключающийся в разработке универсального средства визуализации изображений, обеспечивающего масштабируемость, возможность формирования изображений как в помещении, так и на открытом воздухе, удобство транспортировки, возможность автоматического разворачивания и сворачивания конструкции. Указанные преимущества заявляемого технического решения не являются ограничивающими. Дополнительные преимущества технического решения и отдельных вариантов его осуществления будут ясны специалисту из представленного далее подробного описания и прилагаемых чертежей.
Кроме того, система для визуализации изображения согласно первому аспекту настоящего изобретения, система для визуализации изображения согласно второму аспекту настоящего изобретения, система для визуализации изображения согласно третьему аспекту настоящего изобретения, система для визуализации изображения согласно четвертому аспекту настоящего изобретения, система для визуализации изображения согласно пятому аспекту настоящего изобретения, система для визуализации изображения согласно шестому аспекту настоящего изобретения, система для визуализации изображения согласно седьмому аспекту настоящего изобретения, система для визуализации изображения согласно восьмому аспекту настоящего изобретения, способ визуализации изображений согласно девятому аспекту настоящего изобретения, способ визуализации изображений согласно девятому аспекту настоящего изобретения, способ визуализации изображений согласно десятому аспекту настоящего изобретения, беспилотный летательный аппарат согласно одиннадцатому аспекту настоящего изобретения, способ визуализации изображений согласно двенадцатому аспекту настоящего изобретения, способ визуализации изображений согласно тринадцатому аспекту настоящего изобретения, способ визуализации изображений согласно четырнадцатому аспекту настоящего изобретения, способ визуализации изображений согласно пятнадцатому аспекту настоящего изобретения и способ визуализации изображений согласно шестнадцатому аспекту настоящего изобретения обеспечивают каждый дополнительный технический результат, заключающийся расширении арсенала средств для визуализации изображений. Дополнительный технический результат заключается в разработке универсального средства визуализации изображений, обеспечивающего масштабируемость, возможность формирования изображений как в помещении, так и на открытом воздухе, удобство транспортировки, возможность автоматического разворачивания и сворачивания конструкции. Указанные преимущества заявляемого технического решения не являются ограничивающими. Дополнительные преимущества технического решения и отдельных вариантов его осуществления будут ясны специалисту из представленного далее подробного описания и прилагаемых чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прилагаемые чертежи, которые приведены для обеспечения лучшего понимания сущности настоящего изобретения, составляют часть настоящего документа и включены в него для иллюстрации нижеописанных вариантов реализации и аспектов настоящего изобретения. Прилагаемые чертежи в сочетании с приведенным ниже описанием служат для пояснения сущности настоящего изобретения. На чертежах:
на фиг. 1 схематично показан один из иллюстративных вариантов реализации системы для визуализации изображения согласно настоящему изобретению;
на фиг. 2 схематично показан первый иллюстративный вариант реализации беспилотного летательного аппарата, используемого в составе системы для визуализации изображения, показанной на фиг. 1;
на фиг. 3 схематично показан иллюстративный вариант реализации многослойного составного дисплея, сформированного с использованием беспилотных летательных аппаратов по фиг. 2;
на фиг. 4 схематично показан второй иллюстративный вариант реализации беспилотного летательного аппарата, используемого в составе системы для визуализации изображения, показанной на фиг. 1;
на фиг. 5 схематично показан третий иллюстративный вариант реализации беспилотного летательного аппарата, используемого в составе системы для визуализации изображения, показанной на фиг. 1;
на фиг. 6 схематично показан четвертый иллюстративный вариант реализации беспилотного летательного аппарата, используемого в составе системы для визуализации изображения, показанной на фиг. 1;
на фиг. 7 схематично показан пятый иллюстративный вариант реализации беспилотного летательного аппарата, используемого в составе системы для визуализации изображения, показанной на фиг. 1;
на фиг. 8 схематично показан шестой иллюстративный вариант реализации беспилотного летательного аппарата, используемого в составе системы для визуализации изображения, показанной на фиг. 1;
на фиг. 9 схематично показан седьмой иллюстративный вариант реализации беспилотного летательного аппарата, используемого в составе системы для визуализации изображения, показанной на фиг. 1;
на фиг. 10 схематично показан восьмой иллюстративный вариант реализации беспилотного летательного аппарата, используемого в составе системы для визуализации изображения, показанной на фиг. 1;
на фиг. 11 схематично показан иллюстративный вариант реализации многослойного составного дисплея, сформированного с использованием беспилотных летательных аппаратов по фиг. 10;
на фи. 12 показана блок-схема первого варианта реализации способа визуализации изображения;
на фиг. 13 показана блок-схема второго варианта реализации способа визуализации изображения;
на фиг. 14 показана блок-схема третьего варианта реализации способа визуализации изображения;
на фиг. 15 показана блок-схема четвертого варианта реализации способа визуализации изображения;
на фиг. 16 показана блок-схема пятого варианта реализации способа визуализации изображения;
на фиг. 17 показана блок-схема шестого варианта реализации способа визуализации изображения;
на фиг. 18 показана блок-схема седьмого варианта реализации способа визуализации изображения; и
на фиг. 19 показана блок-схема восьмого варианта реализации способа визуализации изображения.
ОСУЩЕСТВЛЕНИЕ
Ниже со ссылкой на прилагаемые чертежи описаны некоторые примеры возможных вариантов реализации настоящего изобретения, при этом не следует считать, что приведенное ниже описание определяет или ограничивает объем настоящего изобретения.
В приведенном ниже описании хорошо известные функции или конструкции не описаны подробно, поскольку это может завуалировать неважными сведениями сущность настоящего изобретения.
Следует понимать, что в приведенном далее описании термины, такие как «первый», «второй», «верхний», «нижний», «боковой», «передний», «задний» и т.п., использованы исключительно для удобства, при этом их не следует толковать как ограничительные термины. В частности, в контексте настоящего изобретения, если в описании настоящего документа явно не указано иное, термины «первый», «второй», «третий» или т.п. использованы для того, чтобы отличать друг от друга элементы, компоненты, части, узлы, модули, блоки, варианты реализации или т.п., к которым они относятся, а не для целей описания какой-либо конкретной взаимосвязи между ними. Так, например, следует иметь в виду, что использование терминов «первая группа» беспилотных летательных аппаратов и «вторая группа» беспилотных летательных аппаратов не подразумевает какого-либо порядка, отнесения к определенному типу, хронологии, иерархии или ранжирования групп беспилотных летательных аппаратов во множестве беспилотных летательных аппаратов, равно как и их использование (само по себе) не исключает, что дополнительно могут существовать «третья группа» беспилотных летательных аппаратов, «четвертая группа» беспилотных летательных аппаратов и т.п. В дальнейшем, как указано здесь в других контекстах, упоминание «первой группы» и «второй группы» в настоящем документе не исключает возможности того, что в состав этих групп входят одинаковые элементы. Так, например, в некоторых случаях беспилотные летательные аппараты в «первой группе» беспилотных летательных аппаратов и «второй группе» беспилотных летательных аппаратов могут совпадать по конструкции, а в других случаях могут и отличаться по конструкции.
Следует понимать при упоминании объекта в единственном числе возможно и наличие множества таких объектов и наоборот, если явно не указано иное или иное явным образом не следует из контекста.
Грамматические связи выражают любые или все альтернативные и объединенные сочетания связанных пунктов, предложений, слов и т.п., если только явно не указано иное или иное явным образом не следует из контекста. Таким образом следует понимать, что термин «или» в целом означает «и/или» и т.п.
Перечисление диапазонов значений в данном документе не является ограничением, поскольку ссылается в индивидуальном порядке на любые или все значения, попадающие в диапазон, если иное не указано в данном документе, при этом каждое отдельное значение в таком диапазоне включено в описание так, как если бы оно было отдельно приведено в данном документе.
Слова «приблизительно», «примерно» или т.п. в сочетании с числовым значением следует толковать как указывающие на возможное отклонение, которое по мнению специалиста в области техники обеспечивало бы надлежащее функционирование для решения необходимой задачи. Диапазоны значений и/или числовые значения приведены в данном документе исключительно в качестве примеров и не ограничивают объем описанных вариантов реализации.
Все примеры, приведенные в данном документе, или по меньшей мере часть из них, равно как и соответствующие слововыражения («например», «такой как», «в частности» или т.п.), по существу использованы для улучшения понимания сущности настоящего изобретения и обеспечения полноты раскрытия настоящего изобретения, однако эти слововыражения не накладывают каких-либо ограничений на варианты реализации настоящего изобретения, для описания которых они использованы в настоящем документе, в частности не ограничивают практические варианты реализации элементов, компонентов, частей, узлов, модулей, блоков, устройств, средств и/или т.п., используемых для раскрытия особенностей конструкции и функционирования настоящего изобретения.
Термины и определения, примененные в описании данного документа
Термин «иллюстративный» означает неограничивающий пример, вариант или иллюстрацию. Аналогичным образом, термины «например» и «в качестве примера», использованные в данном документе, задают перечни из одного или более неограничивающих примеров, вариантов или иллюстраций. Как использовано в данном документе, схема «выполнена с возможностью» осуществлять функцию во всех случаях, когда эта схема содержит необходимые аппаратные средства и код (если какой-либо код необходим) для осуществления функции независимо от того, является ли исполнение этой функции заблокированным или запрещенным (например, посредством заданной оператором настройки, заводской настройки и т.п.).
В контексте настоящего изобретения термин «соответствие» и его производные (т.е. прилагательное, глагол, наречие) не обязательно означает точную согласованность или точное равенство в чем-либо, чему-либо или между чем-либо в каком-либо отношении, а может подразумевать отхождение или отклонение от указанного равенства в заданных пределах. Например, термин «соответствующие координаты», если из описания настоящего документа явно не следует иное, означает не только, что эти координаты могут быть точно равны друг другу или могут точно совпадать, но и подразумевает, что указанное равенство или совпадение координат может быть установлено с некоторой погрешностью (например, с погрешностью работы GPS-системы) или в рамках заданной географической области, окружающей точную географическую точку или область, на которую указывают эти координаты, или точное географическое место, на которое указывают эти координаты.
В контексте настоящего изобретения термин «беспилотный летательный аппарат» (БПЛА), если из описания настоящего документа явно не следует иное, относится к беспилотному воздушному транспортному средству, которое выполнено с возможностью полета или которое способно осуществлять перемещение по воздуху в автоматическом режиме, т.е. без участия человека или внешних источников управления, или способно осуществлять перемещение по воздуху в полуавтоматическом режиме, т.е. получать по меньшей мере часть управляющих команд от человека (например, пилота, оператора и т.п.) или внешнего источника (например, сервера управления или управляющего устройства) по заданным каналам связи. Неограничивающими примерами БПЛА являются различные мультироторные БПЛА (например, мультикоптерные дроны), однороторные БПЛА (например, беспилотный вертолет), гибридные БПЛА (например, дроны с роторами и крыльями) и т.п.
В контексте настоящего изобретения термин «фюзеляж», если из описания настоящего документа явно не следует иное, относится к корпусу или каркасу беспилотного летательного аппарата, при этом тип, форма, габаритные размеры, конструктивные особенности и материал такого корпуса никак конкретно не ограничены.
В контексте настоящего изобретения термин «модуль», если из описания настоящего документа явно не следует иное, относится к функциональному элементу или совокупности функциональных элементов устройства в виде детали, узла, блока или др. сборочной единицы, которая выполняет определенные технические функции, обеспечивающие выполнение функций устройства. Модуль в целом может быть реализован на практике с использованием сочетания известных конструктивных элементов, сочетания известных конструктивных элементов и известных аппаратных средств, сочетания известных конструктивных элементов и известных программно-аппаратных средств или сочетания известных аппаратных средств и известных программных средств. Так, например, модуль управления может быть реализован с использованием программно-аппаратных средств. В контексте настоящего изобретения модуль управления может представлять собой физическое устройство, аппарат или множеством модулей, выполненных с использованием аппаратного обеспечения, например, с помощью, интегральной схемы специального назначения (ASIC) или программируемой логической интегральной схемы (FPGA), или же комбинации аппаратного и программного обеспечения, например, с помощью микропроцессорной системы и набора инструкций, реализующих функциональные возможности модуля управления, которые (при выполнении) трансформируют микропроцессорную систему в устройство или систему специального назначения (например, автопилот). Кроме того, каждый из модулей или по меньшей мере один из них также может быть реализован в виде комбинации аппаратного и программного обеспечения, при этом одни функциональные возможности, описанные в настоящем документе в отношении одного из модулей, могут быть реализованы только за счет аппаратного обеспечения, а другие функциональные возможности, описанные в настоящем документе в отношении того же самого модуля или иного модуля, могут быть реализованы путем использования аппаратного обеспечения в сочетании с программным обеспечением.
В контексте настоящего изобретения термин «навигационная команда», если из описания настоящего документа явно не следует иное, относится к инструкции, направляемой беспилотным летательным аппаратам, входящим в состав системы для визуализации изображения. Навигационные команды могут быть выданы или обеспечены системой управления полетом беспилотного летательного аппарата в виде цифровых или аналоговых данных инструкций или управляющих сигналов. Навигационные команды могут быть первоначально сгенерированы, без ограничения, автооператором, оператором (как локально, так и удаленно) и/или системой обхода препятствий. Навигационные команды могут быть сообщены, например, модулю управления для управления беспилотным летательным аппаратом или системе управления направлением перемещения беспилотного летательного аппарата.
В контексте настоящего изобретения термин «ручное управление», если из описания настоящего документа явно не следует иное, относится не только к управлению исключительно с помощью рук человека, но и с помощью ног, пальцев, голоса, зрачков человека или их любого подходящего сочетания. Таким образом, в контексте настоящего изобретения термин «орган ручного управления» относится по меньшей мере к одному из следующего: кнопки, рычаги, джойстики, тумблеры, педали, сенсорный экран, сенсоры для управления жестами, сканеры для отслеживания движения зрачков, микрофон и/или т.п.
В контексте настоящего изобретения термин «зарядное устройство», если из описания настоящего документа явно не следует иное, относится к устройству для восполнения запаса хода беспилотного летательного аппарата путем подзарядки его аккумуляторной батареи и/или путем восполнения его запаса топлива.
В контексте настоящего изобретения термин «база данных», если из описания настоящего документа явно не следует иное, подразумевает под собой любой структурированный набор данных, не зависящий от конкретной структуры, программного обеспечения по управлению базой данных, аппаратного обеспечения компьютера, на котором данные хранятся, используются или иным образом оказываются доступны для использования. База данных может находиться на том же оборудовании, выполняющем процесс, который сохраняет или использует информацию, хранящуюся в базе данных, или же она может находиться на отдельном оборудовании, например, выделенном сервере или на множестве серверов.
В контексте настоящего изобретения термин «стыковочное место», если из описания настоящего документа явно не следует иное, означает участок поверхности или область пространства, в которой осуществляется сцепление беспилотного летательного аппарата с тяговым сцепным элементом.
В контексте настоящего изобретения термин «парковочная станция», если из описания настоящего документа явно не следует иное, означает неподвижную или подвижную конструкцию, приспособленную для размещения, хранения и/или восполнения запаса хода (например, подзарядки) в ней беспилотных летательных аппаратов.
В контексте настоящего изобретения термин «управляющее устройство» относится к вычислительному оборудованию, исполняющему компьютерную программу для обеспечения возможности получения запросов (например, от других вычислительных устройств) по сети связи, возможности выполнения или обработки таких запросов и/или возможности отправки таких запросов по сети связи (например, на другие вычислительные устройства). Вычислительное оборудование, исполняющее компьютерную программу, может представлять собой, без ограничения, один физический компьютер или одну физическую компьютерную систему. В контексте настоящего изобретения использование термина «управляющее устройство» не означает, что каждая вычислительная задача (например, полученные инструкции или команды) или любая иная конкретная задача будут получены, выполнены или послужат причиной выполнения одним и тем же управляющим устройством (т.е. одним и тем же программным и/или аппаратным обеспечением), что означает, что любое количество элементов программного обеспечения или аппаратного обеспечения может быть вовлечено в получение/отправку, выполнение или может послужить причиной для выполнения любой задачи или запроса, или последствий любой задачи или запроса, при этом всё это программное и аппаратное обеспечение может быть реализовано в виде одного или нескольких управляющим устройств.
Система для визуализации изображения
На фиг. 1 схематично показан обобщенный вариант реализации системы 500 для визуализации изображения согласно настоящему изобретению, которой лежит в основе каждого из частных или альтернативных вариантов реализации системы 500 для визуализации изображения, описанных ниже в данном документе. Система 500 может обеспечивать возможность визуализации в воздухе статического изображения, динамического изображения или их любого сочетания. В частности, система 500 может обеспечивать возможность визуализации в воздухе, в частности в заданной или выбранной пользователем области пространства, двухмерного (2D) или трехмерного (3D) изображения, состоящего только из статических (неподвижных) элементов изображения, состоящего только из динамических (подвижных) элементов изображения или состоящего из заданной комбинации статических (неподвижных) элементов изображения и динамических (подвижных) элементов изображения.
Следует также отметить, что система 500 для визуализации изображения, показанная на фиг. 1, и ее частные или альтернативные варианты реализации, описанные ниже в данном документе, в целом имеют схожую или аналогичную структуру или архитектуру, в связи с чем схожие или идентичные функциональные компоненты, входящие в состав этих систем 500 для визуализации изображения, обозначены на фиг. 1-6 и в тексте данного документа с использованием одних и тех же ссылочных номеров. Для удобства повествования все разновидности систем 500 для визуализации изображения, описанные в данном документе со ссылкой на фиг. 1-5, обозначены в тексте данного документа с использованием ссылочного номера (500).
Как показано на фиг. 1, система 500 для визуализации изображения содержит три парковочные станции 100-1, 100-2, 100-3, которые для удобства повествования обозначены в данном документе с использованием ссылочного номера (100), и беспилотные летательные аппараты 200, которые первоначально размещены, хранятся или припаркованы в парковочных станциях 100. Кроме того, в состав системы 500 для визуализации изображения также входит управляющее устройство (не показано), соединенное, посредством сети связи (не показана), с парковочными станциями 100 и с беспилотными летательными аппаратами 200 с возможностью обмена с ними данными и возможностью управления их работой.
Управляющее устройство (не показано), входящее в состав системы 500 для визуализации изображений, показанной на фиг. 1, выполнено с возможностью получения и обработки данных от беспилотных летательных аппаратов 200 и парковочных станций 100, а также выполнено с возможностью генерирования управляющих инструкций/команд или навигационных инструкций/команд на основании указанных полученных данных и результатов их обработки с обеспечением возможности выдачи или направления таких сгенерированных управляющих или навигационных команд по меньшей мере на один из беспилотных летательных аппаратов 200 и/или на по меньшей мере на одну из парковочных станций 100, в том числе в ответ на запрос указанного беспилотного летательного аппарата 200 и/или запрос указанной парковочной станции 100.
В некоторых вариантах реализации настоящего изобретения протоколы передачи данных и/или технические средства, используемые для передачи данных между управляющим устройством (не показано), беспилотными летательными аппаратами 200 и парковочными станциями 100, могут по меньшей мере частично отличаться или могут совпадать. Кроме того, для обмена данными могут быть одновременно использованы один или более протоколов связи и соответствующих технических средств связи.
В других вариантах реализации настоящего изобретения для обмена данными между управляющим устройством (не показано), беспилотными летательными аппаратами 200 и парковочными станциями 100 в системе 500 могут быть использованы одно или более средств связи из группы средств связи, содержащей: радиоантенны КВ диапазона, радиоантенны УКВ диапазона, радиоантенны СВЧ диапазона, модуль оптической связи, модуль спутниковой связи полудуплекс/симплекс, модуль сотовой связи 2G/3G/4G/LTE/5G, модуль сетевой беспроводной или проводной связи.
Управляющее устройство (не показано) в системе 500 представляет собой одиночный сервер, который может быть выполнен в виде, например, сервера Dell™ PowerEdge™, на котором может быть использована операционная система Ubuntu Server или Windows Server. В некоторых вариантах реализации настоящего изобретения управляющее устройство (не показано) в системе 500 может представлять собой любое другое подходящее аппаратное и/или прикладное программное, и/или системное программное обеспечение или их комбинацию. В других вариантах реализации настоящего изобретения функции управляющего устройства (не показано) в системе 500 могут быть разделены между несколькими компьютерными устройствами, например могут быть выполнены с помощью нескольких связанных между собой серверов. Кроме того, управляющее устройство (не показано) в системе 500 может иметь доступ по меньшей мере к одной базе данных по сети связи или иным способом, либо может содержать по меньшей мере одну локальную базу данных, хранящуюся на запоминающем устройстве такого управляющего устройства.
В отдельных вариантах реализации настоящего изобретения управляющее устройство (не показано) в системе 500 может быть выполнено с возможностью организации движения и возможностью обеспечения безопасности при перемещении беспилотных летательных аппаратов 200 по воздуху, в частности при нахождении беспилотных летательных аппаратов 200 в заданной области пространства, в которую указанные беспилотные летательные аппараты 200 могут быть направлены указанным управляющим устройством. Кроме того, управляющее устройство системы 500 может быть выполнено с возможностью приема и обработки запроса на направление беспилотных летательных аппаратов 200 из одной и более парковочных станций 100 в заданную географическую область или заданную область пространства и запроса на размещение каждого из указанных направленных беспилотных летательных аппаратов 200 в заданном пространственном местоположении в соответствии с заданной моделью построения беспилотных летательных аппаратов 200, которая может быть доступна управляющему устройству системы 500 и которая может быть выдана на управляющее устройство системы 500 от внешнего источника данных (не показан), при этом указанные запросы могут быть выданы каждый на управляющее устройство системы 500 с использованием, например, пользовательского устройства, выполненного с возможностью установления связи с управляющим устройством системы 500.
Сеть связи (не показана), с которой предпочтительно соединены с возможностью обмена данными управляющее устройство (не показано), парковочные станции 100 и беспилотные летательные аппараты 200, по сути позволяет управляющему устройству, парковочным станциям 100 и беспилотным летательным аппаратам 200 обмениваться друг с другом системными и/или рабочими данными, которые они используют для реализации своих функций или функциональных возможностей, описанных в данном документе. В качестве такой сети связи может быть использована любая подходящая линия беспроводной связи, известная в уровне техники, например, линия связи на основе технологии беспроводной связи «WiFi», линия связи на основе технологии беспроводной связи «2G», «3G», «4G» или «5G», сеть связи на основе технологии «LTE» или т.п.
В одном из вариантов реализации настоящего изобретения в состав системы 500 для визуализации изображений могут входить две и более сетей беспроводной связи, выполненных каждая аналогично вышеописанной сети связи (не показана), для осуществления обмена данными между парковочными станциями 100, беспилотными летательными аппаратами 200 и управляющим устройством (не показано) в режиме реального времени или в реальном времени.
В одном из вариантов реализации настоящего изобретения в состав системы 500 для визуализации изображения могут входить по меньшей мере одна парковочная станция 100 или одна и более парковочных станций 100 (например, одна, две, три, четыре, пять, шесть, семь, восемь, девять, десять и более парковочных станций 100). Следует отметить, что в случае использования только одной парковочной станции 100 она должна быть выполнена с возможностью размещения, парковки или хранения в ней всех беспилотных летательных аппаратов 200, входящих в состав системы 500. Следует также отметить, что в случае использования двух и более парковочных станций 100 каждая из этих парковочных станций должна быть выполнена с возможностью размещения, парковки или хранения в ней по меньшей мере заданной части беспилотных летательных аппаратов из числа беспилотных летательных аппаратов 200, входящих в состав системы 500, при этом количество беспилотных летательных аппаратов 200, размещаемых в таких парковочных станциях 100, равно как и их формы, размеры, типы, технические характеристики и т.п. таких беспилотных летательных аппаратов 200, могут быть как одинаковыми, так и различными.
Парковочные станции 100, входящие в состав системы 500 для визуализации изображений, показанной на фиг. 1, предназначены каждая для размещения, хранения или парковки в них беспилотных летательных аппаратов 200. Следует отметить, что для визуализации изображения система 500 может вообще не задействовать парковочные станции 100 (в частности, может по меньшей мере частично задействовать беспилотные летательные аппараты 200, находящиеся в воздухе на заданном расстоянии от области пространства, в которой предполагается визуализировать изображение, или же беспилотные летательные аппараты 200, используемые для визуализации других изображений в близлежащих областях пространства, удаленных от указанной области пространства на расстояние в пределах порогового значения), может задействовать всего одну парковочную станцию 100 или может задействовать две и более парковочных станций 100 (т.е. три, четыре, пять, шесть, семь, восемь, девять, десять и более), которые географически удалены друг от друга или расположены на расстоянии друг от друга и которые находятся в пределах зоны, окружающей область пространства, в которой предполагается визуализировать изображение. Например, парковочные станции 100 могут быть расположены на расстоянии несколько метров, десятков метров, сотен метров друг от друга или несколько километров друг от друга. Следует отметить, что географическое расположение парковочных станций 100 должно обеспечивать возможность своевременной замены одного или нескольких беспилотных летательных аппаратов 200, в том числе в случае необходимости перемещения визуализируемого изображения в воздухе в различных направлениях и на различные расстояния по отношению к области пространства, в которой указанное изображение было изначально или первоначально визуализировано. Например, парковочные станции 100 могут быть расположены через каждые 10 м, 100 м, 500 м, 1 км или через каждые 10 км и т.п. Для специалиста в данной области техники должно быть очевидно, что количество парковочных станций 100 и их взаимное расположение могут отличаться в зависимости от конкретных географических локаций (в частности, в зависимости от того, находится ли область пространства, в которой предполагается визуализировать изображение, на открытом воздухе, в городской черте или за ее пределами или изображение формируется внутри здания, например в зале кинотеатра или в комнате). В частности, в крупных городах может быть востребовано большее количество парковочных станций 100 на меньшем расстоянии друг от друга, чем в небольших городах, между городами или в иных возможных локациях за пределами города. Для визуализации изображения внутри здания может быть достаточно как одной парковочной станции 100, так и нескольких парковочных станций 100.
Любая из парковочных станций 100, показанных на фиг. 1, представляет собой стационарную конструкцию, снабженную отсеками для размещения в них беспилотных летательных аппаратов 200. В одном из вариантов реализации настоящего изобретения парковочная станция 100 может быть реализована в виде отдельно стоящего строения или может быть выполнена в виде корпуса, установленного на здании или внутри здания, или ином сооружении или ином стационарном объекте. В другом варианте реализации настоящего изобретения парковочная станция 100 может быть реализована в виде специального корпуса или конструкции, приспособленной для размещения, хранения или парковки в ней одного или более беспилотных летательных аппаратов 200 и установленной на подвижной платформе, например в кузове грузовика, на пароме, самолете, аэростате или ином транспортном средстве, которое обеспечивает возможность изменения географического местоположения парковочной станции 100, что позволяет оперативно размещать парковочные станции, используемые в составе системы 500, в надлежащем количестве (в том числе в дополнение к имеющимся стационарным парковочных станциям) в непосредственной близости от области пространства, в которой предполагается визуализировать изображение. Еще в одном варианте реализации настоящего изобретения парковочная станция 100 может представлять собой переносной корпус, выполненный, например в виде рюкзака, чемодана или сумки на колесах, который может перемещаться человеком без использования вспомогательных технических средств. Еще в одном варианте реализации настоящего изобретения парковочная станция 100 может быть реализована в виде подвижной конструкции или специального транспортного средства, кузов которого может быть приспособлен для размещения, хранения или парковки в нем одного или более беспилотных летательных аппаратов 200. Подвижные парковочные станции 100 могут перемещаться между различными географическими локациями с учетом наиболее востребованных локаций для визуализации изображения с помощью беспилотных летательных аппаратов 200 и с учетом потребностей в оптимизации замен беспилотных летательных аппаратов 200, используемых для визуализации изображения. Для специалиста в данной области техники должно быть очевидно, что некоторые стационарные или подвижные парковочные станции могут совместно использоваться двумя и более системами для визуализации изображений, выполненных каждая аналогично системе 500.
Следует отметить, что система 500 для визуализации изображения может содержать парковочные станции любого типа (например, наземные стационарные, водные стационарные, воздушные стационарные, наземные подвижные, водные подвижные, воздушные подвижные парковочные станции и/или т.п.), выполненные каждая с возможностью парковки или временного хранения по меньшей мере одного беспилотного летательного аппарата 200, входящего в состав по меньшей мере одной системы 500 или совместно используемого системой 500 и по меньшей мере одной другой системой для визуализации изображения, подобной системе 500.
Кроме того, каждая из парковочных станций 100, входящих в состав системы 500 для визуализации изображения, показанной на фиг. 1, может быть снабжена источником питания (не показан), который может представлять собой одну или более аккумуляторных батарей, генератор на основе двигателя внутреннего сгорания, генератор на основе водородного двигателя, солнечную батарею и любой иной подходящий источник энергии, известный в уровне техники, и может быть снабжена одним или более зарядными устройствами (не показаны), электрически соединенными каждый с указанным источником питания и обеспечивающими каждое возможность подключения к нему по меньшей мере одного из беспилотных летательных аппаратов 200, помещаемых на хранение или паркуемых в парковочной станции 100, с обеспечением возможности подзарядки, дозарядки или восполнения запаса хода указанного беспилотного летательного аппарата 200. Следует отметить, что каждое из зарядных устройств (не показаны) парковочной станции 100 может представлять собой беспроводное зарядное устройство, проводное зарядное устройство или зарядную док-станцию. В частности, каждое зарядное устройство, которым может быть снабжена по меньшей мере одна из парковочных станций 100, входящих в состав системы 500, может быть выполнено, например, в виде устройства для подачи электрической энергии, устройства для подачи жидкого или газообразного топлива и/или т.п. В одном из вариантов реализации настоящего изобретения по меньшей мере одно из зарядных устройств (не показаны), которыми может быть снабжена любая из парковочных станций 100, входящих в состав системы 500, может быть гидравлически соединено с помощью насоса, соединенного гидравлической линией с резервуаром или емкостью с топливом с возможностью забора этого топлива из указанной емкости, с обеспечением возможности подачи указанного забранного объема топлива в топливный бак беспилотного летательного аппарата 200, гидравлически соединенный с работающим на топливе двигателем беспилотного летательного аппарата 200, для восполнения запаса его хода (в частности, благодаря по меньшей мере частичному восполнению объема топлива в топливном баке беспилотного летательного аппарата 200).
В некоторых вариантах реализации настоящего изобретения по меньшей мере часть беспилотных летательных аппаратов 200, используемых для визуализации изображения, может входить в состав системы 500 для визуализации изображения, показанной на фиг. 1, а другая часть беспилотных летательных аппаратов 200, используемых для визуализации изображения, может и не входить в состав этой системы 500, при этом каждая из парковочных станций 100, входящих в состав системы 500, может быть адаптирована или приспособлена для размещения в ней беспилотных летательных аппаратов 200 с различными модификациями, габаритами, силовыми установками и/или т.п., известными в уровне техники.
Следует отметить, что к беспилотным летательным аппаратам 200, входящим в состав системы 500 для визуализации изображений, показанной на фиг. 1, следует относить как беспилотные летательные аппараты 200, которые могут находиться в воздухе в заданной области пространства или могут быть направлены в указанную область пространства, так и беспилотные летательные аппараты 200, размещенные в парковочных станциях 100 или на них, а также любые иные беспилотные летательные аппараты 200, которые могут быть дополнительно направлены (например, в качестве заменяющих или дополнительных беспилотных летательных аппаратов 200) в указанную область пространства или по меньшей мере в одну из указанных парковочных станций 100 по меньшей мере из одной другой системы для визуализации изображения, аналогичной системе 500, при этом специалисту в данной области техники должно быть очевидно, что по меньшей мере часть из беспилотных летательных аппаратов 200, входящих в состав системы 500, могут иметь разные типы, модификации, конструкции, габариты, массы, силовые установки и/или т.п.
Каждый из беспилотных летательных аппаратов 200, показанных на фиг. 1 в составе системы 500, содержит корпус, кузов или фюзеляж 210 любого подходящего типа, а также содержит два движителя 220, каждый из которых выполнен в виде винта и которые размещены или установлены на фюзеляже 210 с его внешней стороны, и модуль управления (не показан), установленный внутри фюзеляжа 210 и выполненный с возможностью управления работой беспилотного летательного аппарата 200, в том числе работой его движителей 220. Кроме того, в состав каждого из беспилотных летательных аппаратов 200 может входить по меньшей мере одно из следующих средств беспроводной связи: радиоантенна КВ диапазона, радиоантенна УКВ диапазона, радиоантенна СВЧ диапазона, модуль оптической связи, модуль спутниковой связи полудуплекс/симплекс, модуль сотовой связи 2G/3G/4G/LTE/5G, модуль сетевой беспроводной связи между несколькими беспилотными летательными аппаратами и/или ретрансляторами и т.п.
Модуль управления (не показан), входящий в состав каждого из беспилотных летательных аппаратов 200, показанных на фиг. 1, соединен посредством вышеописанной сети связи (не показана) с управляющим устройством (не показано) с возможностью обмена с ним данными, что позволяет указанному модулю управления принимать и обрабатывать навигационные команды и/или управляющие команды от указанного управляющего устройства с обеспечением возможности управления работой указанного беспилотного летательного аппарата 200 в зависимости от указанных навигационных команд и/или управляющих команд. В частности, в ответ на навигационные команды и/или управляющие команды от управляющего устройства (не показано), входящего в состав системы 500, модуль управления (не показан) беспилотного летательного аппарата 200 может обеспечивать, например, возможность изменения скорости или направления полета беспилотного летательного аппарата 200, направление беспилотного летательного аппарата 200 из одной из парковочной станций 100, в которой он был изначально размещен, в заданную область пространства, возврат беспилотного летательного аппарата 200 на одну из парковочных станций 100 для хранения и/или восполнения запаса хода, направления беспилотного летательного аппарата 200 из одной заданной области пространства в другую заданную область пространства и/или т.п. Следует отметить, что области пространства, в которых может быть визуализировано изображение с использованием беспилотных летательных аппаратов 200, входящих в состав системы 500, показанной на фиг. 1, могут быть предварительно известны управляющему устройству (не показано), входящему в состав системы 500 (например, координаты таких областей пространства могут быть предварительно записаны в память управляющего устройства), или могут быть сообщены указанному управляющему устройству от внешнего источника данных (например, от базы данных, сервера, пользовательского устройства и т.п.). В частности, область пространства, в которой должно быть визуализировано заданное изображение, может быть выбрана или задана пользователем с использованием средств ввода-вывода (например, кнопки, экранные кнопки или экранная клавиатура на сенсорном экране, средства голосового ввода данных и т.п.) своего пользовательского устройства, которое может быть выполнено в виде мобильного телефона, смартфона, ноутбука, персонального компьютера или любого иного подходящего для этих целей вычислительного устройства, известного в уровне техники, и которое может устанавливать связь с управляющим устройством системы 500 с использованием вышеописанной или иной сети связи для передачи на управляющее устройство системы 500 данных о выбранной пользователем области пространства, в которой должно быть визуализировано изображение, или данных о введенных или выбранных пользователем координатах такой области пространства.
Фюзеляж 210 любого из беспилотных летательных аппаратов 200, входящих в состав системы 500, показанной на фиг. 1, может иметь любые подходящие форму и габаритные размеры, которые придают в уровне техники любому известному беспилотному летательному аппарату, и может быть выполнен из любого подходящего материала, известного в уровне техники и обычно используемого для изготовления корпусов беспилотных летательных аппаратов (например, из композитного материала). Таким образом, тип, форма, габаритные размеры и материал фюзеляжа 210 в беспилотном летательном аппарате 200 никак конкретно не ограничены в рамках настоящего изобретения. В частности, фюзеляж 210 может иметь форму, схожую с корпусом вертолета, однако специалисту в данной области техники должно быть очевидно, что фюзеляж 210 может иметь любую другую форму, похожую на любой другой летательный аппарат, например на самолет, шаттл, дельтаплан, параплан или любой другой летательный аппарат, известный в уровне техники. Кроме того, фюзеляж 210 может иметь форму подобную птице или насекомому и представлять собой орнитоптер или энтомоптер (также известный как махолет).
В одном из вариантов реализации настоящего изобретения фюзеляж 210 любого из беспилотных летательных аппаратов 200, входящих в состав системы 500, показанной на фиг. 1, может представлять собой каркас или несущую раму, на которой закреплена обшивка или которая может быть по меньшей мере частично окружена оболочкой, при этом фюзеляж 210 может быть дополнительно снабжен оперением, крылом, крыльями, винтом, силовой установкой и/или т.п. в зависимости от конкретного варианта исполнения фюзеляжа 210.
В другом варианте реализации настоящего изобретения фюзеляж 210 любого из беспилотных летательных аппаратов 200, входящих в состав системы 500, показанной на фиг. 1, может быть выполнен из металла, пластика, композитного материала (например, из композитных сэндвич-панелей), алюминиевого материала (например, из алюминиевых сэндвич-панелей), титанового материала (например, из сэндвич-панелей из титана) или любого иного подходящего материала, известного в уровне техники, в том числе с использованием любого подходящего сочетания перечисленных материалов (например, сэндвич панель из титана с алюминиевым сотовым сердечником). Материал изготовления фюзеляжа 210 в любом из беспилотных летательных аппаратов 200 никак конкретно не ограничен в настоящем изобретении.
Еще в одном варианте реализации настоящего изобретения фюзеляж 210 любого из беспилотных летательных аппаратов 200, входящих в состав системы 500, показанной на фиг. 1, может представлять собой экзоскелет или иную несущую конструкцию, которая может быть прикреплена к пользователю или пилоту указанного беспилотного летательного аппарата 200 или может быть надета на него.
В некоторых вариантах реализации настоящего изобретения фюзеляж 210 любого из беспилотных летательных аппаратов 200, входящих в состав системы 500, показанной на фиг. 1, может быть дополнительно снабжен шасси (не показано), которое по сути представляет собой систему опор, которая может быть необходима по меньшей мере для размещения указанного беспилотного летательного аппарата 200 в одной из парковочных станций 100, или представляет собой по меньшей мере одну опору, которой снабжен фюзеляж 210. В частности, шасси беспилотного летательного аппарата 200 может иметь полозковый тип, колесный тип, поплавковый тип или любой другой тип, известный в уровне техники. Тип, форма, габаритные размеры и материал шасси беспилотного летательного аппарата 200 никак конкретно не ограничены в рамках настоящего изобретения.
Следует отметить, что шасси беспилотного летательного аппарата 200 в зависимости от его конкретного варианта исполнения может по меньшей мере обеспечивать (i) восприятие статического нагружения от собственного веса при стоянке беспилотного летательного аппарата 200 в одной из парковочных систем 100; и (ii) амортизацию динамических нагрузок, возникающих при посадке беспилотного летательного аппарата 200 (в том числе аварийной) в одной из парковочных систем 100.
В одном из вариантов реализации настоящего изобретения беспилотные летательные аппараты 200 в системе 500 для визуализации изображения могут и не быть снабжены шасси вообще. В одной из разновидностей такого варианта реализации настоящего изобретения днище фюзеляжа 210 в любом из беспилотных летательных аппаратов 200, входящих в состав системы 500, показанной на фиг. 1, может быть снабжено амортизирующей подложкой (не показана) из упругого материала (например, из резины), которая может быть скреплена с указанным днищем с его наружной стороны, или любой иной подходящей опорой, известной в уровне техники и используемой для беспилотных летательных аппаратов (в частности, для дронов) в уровне техники.
В другом варианте реализации настоящего изобретения фюзеляж 210 в любом из беспилотных летательных аппаратов 200, входящих в состав системы 500 для визуализации изображения, показанной на фиг. 1, может быть дополнительно снабжен по меньшей мере одним крылом (не показано), которое может быть выполнено за одно целое с фюзеляжем 210, может быть прикреплено к фюзеляжу 210 с его наружной стороны или по меньшей мере частично вделано или встроено в фюзеляж 210, при этом указанное крыло может первоначально находиться в сложенном состоянии или задвинутом состоянии (исходное положение) и может быть выполнено с возможностью его развертывания соответственно в разложенное или выдвинутое состояние (рабочее положение) под управлением вышеописанного управляющего устройства (не показано), входящего в состав системы 500. Следует отметить, что количество крыльев, которыми может быть снабжен фюзеляж 210, может быть подобрано с учетом массогабаритных показателей и конструкционных особенностей фюзеляжа 210 для создания дополнительной подъемной силы в полете и снижения нагрузки на беспилотные летательные аппараты 200 при их перемещении по воздуху. Следует также отметить, что по меньшей мере одно из крыльев, которыми может быть снабжен фюзеляж 210 в любом из беспилотных летательных аппаратов 200, входящих в состав системы 500, может быть выполнено складным, телескопическим, выдвижным или т.п. для уменьшения габаритных размеров указанного беспилотного летательного аппарата 200 в парковочном положении, в котором он находится при его размещении в одной из парковочных станций 100, при этом развертывание указанного крыла может осуществляться под управлением вышеописанного управляющего устройства (не показано), входящего в состав системы 500, при взлете этого беспилотного летательного аппарата 200 из парковочной станции 100, в которой он был размещен.
В ином варианте реализации настоящего изобретения фюзеляж 210 в любом из беспилотных летательных аппаратов 200, входящих в состав системы 500 для визуализации изображения, показанной на фиг. 1, может быть дополнительно снабжен крыльями для создания дополнительной подъемной силы в полете и по меньшей мере одним авиационным двигателем (не показан), а предпочтительно двумя авиационными двигателями, для обеспечения возможности перемещения беспилотного летательного аппарата 200 по воздуху (в том числе в аварийной ситуации, например в случае повреждения, выхода из строя и/или разрядки беспилотного летательного аппарата 200, используемого для визуализации изображения) или повышения скорости перемещения беспилотного летательного аппарата 200 по воздуху (т.е. обеспечение возможности работы авиационных двигателей в дополнение к движителям 220, используемым для перемещения беспилотного летательного аппарата 200 по воздуху в стандартной ситуации, или вместо них). Следует отметить, что в качестве каждого такого авиационного двигателя может быть использован, например, винтовой двигатель, реактивный двигатель, комбинированный авиационный двигатель или любой другой подходящий авиационный двигатель, известный в уровне техники. Следует также отметить, что в случае использования в беспилотном летательном аппарате 200 двух авиационных двигателей их конструкции и/или типы могут совпадать или отличаться друг от друга. Каждый такой авиационный двигатель, которым может быть дополнительно снабжен фюзеляж 210, может работать под управлением нижеописанного модуля управления (не показан), который может выдавать управляющие команды на драйвер управления двигателем с обеспечением возможности запуска, остановки или изменения режима работы указанного авиационного двигателя (изменение рабочих параметров авиационного двигателя).
В некотором другом варианте реализации настоящего изобретения фюзеляж 210 в любом из беспилотных летательных аппаратов 200, входящих в состав системы 500 для визуализации изображения, показанной на фиг. 1, может быть дополнительно снабжен по меньшей мере одним дополнительным несущим винтом (не показан) или винтовым движителем любого подходящего типа, известного в уровне техники, для обеспечения возможности перемещения беспилотного летательного аппарата 200 по воздуху (в том числе в аварийной ситуации, например в случае повреждения, выхода из строя и/или полной разрядки беспилотного летательного аппарата 200, используемого для визуализации изображения) или повышения скорости перемещения беспилотного летательного аппарата 200 по воздуху (т.е. обеспечение возможности работы несущего винта или винтового движителя в дополнение к движителям 220, используемым для перемещения беспилотного летательного аппарата 200 по воздуху в стандартной ситуации, или вместо них). Кроме того, в данном варианте реализации настоящего изобретения фюзеляж 210 в беспилотном летательном аппарате 200 может дополнительно содержать силовую установку (не показана), которая может быть образована, например, из одного или двух турбовальных двигателей и которая может быть функционально соединена с каждым из несущих винтов беспилотного летательного аппарата 200 с обеспечением возможности подачи на них мощности для приведения их в действие. Каждая такая силовая установка беспилотного летательного аппарата 200, функционально соединенная с несущими винтами, которыми может быть дополнительно снабжен фюзеляж 210, с обеспечением передачи на них приводного усилия, может работать под управлением нижеописанного модуля управления (не показан), который может выдавать управляющие команды на драйвер управления силовой установкой с обеспечением возможности запуска, остановки или изменения режима работы указанной силовой установки (изменение рабочих параметров силовой установки), с обеспечением возможности изменения состояния этих несущих винтов.
В других вариантах реализации настоящего изобретения фюзеляж 210 в любом из беспилотных летательных аппаратов 200, входящих в состав системы 500 для визуализации изображения, показанной на фиг. 1, может быть дополнительно снабжен измерительными датчиками (не показаны) для измерения параметров полета беспилотного летательного аппарата 200, а нижеописанный модуль управления (не показан) беспилотного летательного аппарата 200 может быть соединен с возможностью обмена данными с указанными измерительными датчиками и с управляющим устройством системы 500 с обеспечением возможности выдачи в реальном времени указанных измеренных параметров полета беспилотного летательного аппарата 200 на указанное управляющее устройство и может быть дополнительно выполнен с возможностью приема навигационных команд от управляющего устройства системы 500, сгенерированных управляющим устройством системы 500 в ответ на указанные измеренные параметры полета беспилотного летательного аппарата 200. В ответ на навигационные команды, принятые модулем управления (не показан) беспилотного летательного аппарата 200 от управляющего устройства системы 500, указанный модуль управления генерирует и выдает свои управляющие команды, обеспечивающие изменение параметров работы указанного беспилотного летательного аппарата 200. В частности, в данном варианте реализации настоящего изобретения управляющее устройство системы 500 может быть дополнительно выполнено с возможностью выдачи навигационных команд на каждый из беспилотных летательных аппаратов 200, входящих в состав системы 500, показанной на фиг. 1, для изменения его курса перемещения и/или режима работы в случае, если по меньшей мере один из его параметров полета, измеряемых с помощью вышеописанных измерительных датчиков, не соответствует пороговому значению или выходит за пределы диапазона пороговых значений. Следует отметить, что в качестве измерительных датчиков для измерения параметров полета беспилотного летательного аппарата 200 могут быть использованы, например, барометрические высотометры, индикаторы воздушной скорости и числа Маха, вариометры, приемники воздушного давления, централизованные системы воздушных сигналов, манометры, тахометры, термометры, системы управления движителями, авиагоризонты, курсовые приборы и автоматы углов атаки и сигнализации перегрузок.
В иных вариантах реализации настоящего изобретения фюзеляж 210 в любом из беспилотных летательных аппаратов 200, входящих в состав системы 500 для визуализации изображения, показанной на фиг. 1, может быть дополнительно снабжен измерительными датчиками для измерения параметров состояния указанного фюзеляжа 210, а нижеописанный модуль управления (не показан) указанного беспилотного летательного аппарата 200 может быть соединен с возможностью обмена данными с указанными измерительными датчиками и с управляющим устройством системы 500 с обеспечением возможности выдачи в реальном времени указанных измеренных параметров состояния фюзеляжа 210 беспилотного летательного аппарата 200 на указанное управляющее устройство и может быть дополнительно выполнен с возможностью приема навигационных команд от управляющего устройства системы 500, сгенерированных управляющим устройством системы 500 в ответ на указанные измеренные параметры состояния фюзеляжа 210 беспилотного летательного аппарата 200. В ответ на навигационные команды, принятые модулем управления (не показан) беспилотного летательного аппарата 200 от управляющего устройства системы 500, указанный модуль управления выполнен с возможностью генерирования и выдачи своих управляющих команд, обеспечивающих возможность замены указанного беспилотного летательного аппарата 200 на другой беспилотный летательный аппарат из беспилотных летательных аппаратов 200, входящих в состав системы 500 и размещенных в соответствующих парковочных станциях 100. В частности, в данном варианте реализации настоящего изобретения управляющее устройство системы 500 может быть дополнительно выполнено с возможностью выдачи навигационных команд на каждый из беспилотных летательных аппаратов 200, по меньшей мере один из параметров состояния фюзеляжа 210 которого не соответствует пороговому значению или выходит за пределы диапазона пороговых значений, и с возможностью выдачи навигационных команд на другой беспилотный летательный аппарат, размещенный в одной из парковочных станций 100, входящих в состав системы 100, с обеспечением возможности его направления из указанной парковочной станции 100 в пространственную область, в которой находится указанный подлежащий замене беспилотный летательный аппарат 200, для осуществления замены подлежащего замене беспилотного летательного аппарата 200 на указанный другой беспилотный летательный аппарат 200. Следует отметить, что в качестве датчиков для измерения параметров состояния фюзеляжа 210 беспилотного летательного аппарата могут быть использованы, например, датчики вибрации, тензорезисторы, датчики силы и т.п.
В некоторых иных вариантах реализации настоящего изобретения фюзеляж 210 в любом из беспилотных летательных аппаратов 200, входящих в состав системы 500 для визуализации изображения, показанной на фиг. 1, может быть дополнительно снабжен измерительными датчиками для измерения параметров состояния конструкции указанного беспилотного летательного аппарата 200, а нижеописанный модуль управления (не показан) указанного беспилотного летательного аппарата 200 может быть соединен с возможностью обмена данными с указанными измерительными датчиками и с управляющим устройством системы 500 с обеспечением возможности выдачи в реальном времени указанных измеренных параметров состояния конструкции беспилотного летательного аппарата 200 на указанное управляющее устройство и может быть дополнительно выполнен с возможностью приема навигационных команд от управляющего устройства системы 500, сгенерированных управляющим устройством системы 500 в ответ на указанные измеренные параметры состояния конструкции беспилотного летательного аппарата 200. В ответ на навигационные команды, принятые модулем управления (не показан) беспилотного летательного аппарата 200 от управляющего устройства системы 500, указанный модуль управления выполнен с возможностью генерирования и выдачи своих управляющих команд, обеспечивающих возможность замены указанного беспилотного летательного аппарата 200 на другой беспилотный летательный аппарат из беспилотных летательных аппаратов 200, входящих в состав системы 500 и размещенных в соответствующих парковочных станциях 100. В частности, в данном варианте реализации настоящего изобретения управляющее устройство системы 500 может быть дополнительно выполнено с возможностью выдачи навигационных команд на каждый из беспилотных летательных аппаратов 200, по меньшей мере один из параметров состояния конструкции которого не соответствует пороговому значению или выходит за пределы диапазона пороговых значений, и с возможностью выдачи навигационных команд на другой беспилотный летательный аппарат, размещенный в одной из парковочных станций 100, входящих в состав системы 100, с обеспечением возможности его направления из указанной парковочной станции 100 в пространственную область, в которой находится указанный подлежащий замене беспилотный летательный аппарат 200, для осуществления замены подлежащего замене беспилотного летательного аппарата 200 на указанный другой беспилотный летательный аппарат 200. Следует отметить, что в качестве датчиков для измерения параметров состояния конструкции беспилотного летательного аппарата могут быть использованы, например, датчики вибрации, тензорезисторы, датчики силы и т.п.
В некоторых вариантах реализации настоящего изобретения фюзеляж 210 в любом из беспилотных летательных аппаратов 200, входящих в состав системы 500 для визуализации изображения, показанной на фиг. 1, может представлять собой каркас (т.е. остов из скрепленных между собой несущих конструктивных элементов, который не снабжен ни крышей, ни стенами, ни полом), на котором смонтированы или установлены по меньшей мере нижеописанный модуль управления (не показан) беспилотного летательного аппарата 200, движители 220 и/или т.п.
Модуль управления (не показан), входящий в состав каждого из беспилотных летательных аппаратов 200, показанных на фиг. 1, может представлять собой совокупность аппаратных и программных средств, обеспечивающих выполнение заданных функциональных возможностей, описанных в данном документе. В частности, модуль управления (не показан) беспилотного летательного аппарата 200 может представлять собой процессорное или вычислительное устройство, выполненное с возможностью получения доступа к управляющим программным инструкциям с обеспечением возможности их исполнения для осуществления релевантных функциональных возможностей, описанных в данном документе.
Кроме того, модуль управления (не показан) в каждом из беспилотных летательных аппаратов 200, входящих в состав системы 500 для визуализации изображения, может быть выполнен с возможностью получения доступа к управляющим программным инструкциям с обеспечением возможности их исполнения для осуществления одной из следующих операций: (i) управление работой беспилотного летательного аппарата 200 в полностью автоматическом режиме (автопилот), (ii) управление работой беспилотного летательного аппарата 200 в полуавтоматическом режиме, предусматривающем получение по меньшей части управляющих команд от оператора, который может находиться в удаленном пункте управления (например, в мобильном или стационарном пункте управления полетом беспилотных летательных аппаратов) и который может вводить указанные управляющие команды посредством по меньшей мере одного из устройств ввода команд, входящих в состав органов управления в указанном пункте управления, или (iii) управление работой беспилотного летательного аппарата 200 в автоматическом режиме при получении по меньшей части управляющих команд от внешнего источника управления (например, от управляющего устройства, входящего в состав системы 500, одной из парковочных станций 100, управляющего устройства, входящего в состав другой системы для визуализации изображения, аналогичной системе 500, спутника, диспетчерской вышки и/или т.п.) по каналу беспроводной передачи данных, установленному между указанным модулем управления беспилотного летательного аппарата 200 и указанным внешним источником управления.
Любой из беспилотных летательных аппаратов 200, входящих в состав системы 500 для визуализации изображения, показанной на фиг. 1, может быть направлен или перемещен по воздуху, посредством модуля управления (не показан) этого беспилотного летательного аппарата 200, из одной из парковочных станций 100 в конкретную географическую область или заданную область пространства как в автоматическом режиме (автопилот без вмешательства оператора) в ответ на управляющие или навигационные команды указанного модуля управления или одного из вышеописанных внешних источников управления (например, управляющего устройства, входящего в состав системы 500), так и в полуавтоматическом режиме (автопилот с вмешательством оператора) в ответ на управляющие команды оператора, введенные указанным оператором с помощью вышеописанных органов управления, находящихся в удаленном пункте управления (не показан). Другими словами, возможен случай, когда решение о направлении или перемещении по воздуху каждого из беспилотных летательных аппаратов 200, входящих в состав системы 500, в отдельности в конкретную географическую область или заданную область пространства, может быть принято оператором этого беспилотного летательного аппарата 200, который может выдать, посредством вышеописанных органов управления, в модуль управления беспилотного летательного аппарата 200 соответствующую управляющую команду, сформированную оператором с помощью указанных органов управления путем выбора одной из предварительно заданных областей пространства, доступных для визуализации в них заданного изображения, или путем задания координат указанной области пространства, при этом указанная область пространства может находиться рядом с одной или более из парковочных станций 100, входящих в состав системы 500.
Следует отметить, управление полетом каждого из беспилотных летательных аппаратов 200, входящих в состав системы 500, может быть осуществлено, например, с использованием стандартных программно-аппаратных средств, используемых в уровне технике для управления беспилотными летательными аппаратами, подобными беспилотным летательным аппаратам 200, и поставляемых вместе с такими беспилотными летательными аппаратами 200. В частности, в качестве беспилотных летательных аппаратов 200 могут быть использованы имеющиеся на рынке беспилотные летательные аппараты 200 любого типа и любой модификации, снабженные встроенной функцией автопилота и/или встроенной функцией дистанционного ручного или автоматического управления.
Модуль управления (не показан) в любом из беспилотных летательных аппаратов 200, входящих в состав системы 500 для визуализации изображения, может содержать один или несколько интерфейсов передачи данных для отправки и/или получения сигналов/команд/запросов/инструкций. Следует отметить, что сами интерфейсы передачи данных, базы данных и иное аппаратное обеспечение могут либо входить в состав указанного модуля управления, либо могут быть реализованы в виде отдельных модулей или блоков, соединенных с указанным модулем управления с возможностью обмена данными.
В настоящем изобретении модуль управления (не показан) в каждом из беспилотных летательных аппаратов 200, входящих в состав системы 500 для визуализации изображения, показанной на фиг. 1, может быть соединен по сети связи (не показана) с внешним источником управления в виде вышеописанного управляющего устройства, входящего в состав системы 500, с обеспечением возможности обмена с ним данными. В частности, модуль управления (не показан) в каждом из беспилотных летательных аппаратов 200 предварительно запрограммирован обмениваться данными с управляющим устройством (не показано), входящим в состав системы 500, для получения или приема от него управляющих или навигационных команд и предварительно запрограммирован исполнять указанные принятые навигационные или управляющие команды для обеспечения надлежащего функционирования указанного беспилотного летательного аппарата 200 в соответствии с поставленной задачей, в частности для изменения параметров работы такого беспилотного летательного аппарата 200, изменения направления полета (перемещения по воздуху) такого беспилотного летательного аппарата 200, изменения или смещения пространственного местоположения такого беспилотного летательного аппарата 200 и/или т.п.
В частности, модуль управления каждого из беспилотных летательных аппаратов 200, может содержать процессор, выполненный с возможностью исполнения машиночитаемых управляющих команд или навигационных команд в автоматическом режиме или по меньшей мере частично на основе команд, принимаемых от оператора или иного внешнего источника управления по меньшей мере по одному каналу беспроводной связи.
Таким образом, в настоящем изобретении управляющее устройство (не показано), которое входит в состав системы 500 и которое соединено с возможностью обмена данными с беспилотными летательными аппаратами 200, входящими в состав системы 500, по сути выполнено с возможностью направления всех беспилотных летательных аппаратов 200 или по меньшей мере части из них по меньшей мере из одной парковочной станции из парковочных станций 100, входящих в состав системы 500, в область пространства, ограниченную или заданную конкретными географическими координатами, с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов 200 в заданном пространственном местоположении в соответствии с заданной моделью построения беспилотных летательных аппаратов 200 в воздухе.
Модель построения беспилотных летательных аппаратов, используемая для построения беспилотных летательных аппаратов 200 в заданной области пространства, в которую направляют эти беспилотные летательные аппараты 200, может быть приведена в соответствие с заданной областью пространства, в частности может задаваться автоматически в зависимости от предварительно заданной или выбранной пользователем области пространства, в которой необходимо визуализировать изображение. В качестве альтернативы модель построения беспилотных летательных аппаратов 200 может быть выбрана или задана пользователем отдельно от области пространства, в которой необходимо визуализировать изображение, с использованием, например, вышеописанного пользовательского устройства. Следует также отметить, что каждое из пространственных местоположений, соответствующих конкретной модели построения беспилотных летательных аппаратов, имеет заданные географические координаты, заданное расстояние от поверхности земли, воды или иного объекта местности, а также имеет иные параметры, дополнительно характеризующие указанное пространственное местоположение (например, заданное смещение по отношению ко всем смежным пространственным местоположениям, в которых должны быть размещены остальные беспилотные летательные аппараты 200 в соответствии с конкретной моделью построения беспилотных летательных аппаратов 200).
Модель построения беспилотных летательных аппаратов содержит по меньшей мере данные типах и/или технических характеристиках беспилотных летательных аппаратов 200, которые могут быть использованы для ее реализации, данные о форме, размерах и/или геометрии двухмерного (2D) или трехмерного (3D) объекта, который может быть сформирован в воздухе при надлежащем размещении беспилотных летательных аппаратов 200 и который предполагается использовать для визуализации изображения тем или ином образом (см. приведенное ниже описание), данные о взаимном расположении беспилотных летательных аппаратов 200 в заданной области пространства при формировании двухмерного или трехмерного объекта в воздухе в соответствии с указанной моделью построения беспилотных летательных аппаратов, данные о пространственных местоположениях, которые должны занять беспилотные летательные аппараты 200 для формирования двухмерного или трехмерного объекта в воздухе, данные о взаимном положении беспилотных летательных аппаратов 200 в составе формируемого в воздухе двухмерного или трехмерного объекта, данные об особенностях местности, в которой может быть сформирован двухмерный или трехмерный объект в воздухе в соответствии с указанной моделью построения беспилотных летательных аппаратов, данных о свободном пространстве, требуемом для формирования двухмерного или трехмерного объекта в воздухе в соответствии с указанной моделью построения беспилотных летательных аппаратов, и/или т.п.
Кроме того, модель построения беспилотных летательных аппаратов может предполагать непрерывное или периодическое перемещение двухмерного или трехмерного объекта, формируемого в воздухе с использованием беспилотных летательных аппаратов 200, по отношению к области пространства, в которой указанных объект был первоначально сформирован. Кроме того, модель построения беспилотных летательных аппаратов может предполагать непрерывное или периодическое перемещение по меньшей мере одной части или нескольких частей двухмерного или трехмерного объекта, формируемого в воздухе с использованием беспилотных летательных аппаратов 200, в области пространства, в которой указанных объект был первоначально сформирован.
Кроме того, модуль управления (не показан) в каждом из беспилотных летательных аппаратов 200, входящих в состав системы 500 для визуализации изображения, показанной на фиг. 1, может иметь доступ к одной или нескольким локальным или удаленным базам данных (не показаны), измерительным устройствам или датчикам (не показаны), установленным с внешней и внутренней сторон фюзеляжа 210 и/или бортовым системам контроля и управления указанного беспилотного летательного аппарата 200.
Модулю управления (не показан) в каждом из беспилотных летательных аппаратов 200, входящих в состав системы 500 для визуализации изображения, показанной на фиг. 1, могут быть первоначально сообщены по меньшей мере следующие данные, используемые этим модулем управления при осуществлении своих функций: (a) географические координаты каждой из областей пространства, в которых могут быть визуализированы изображения; (b) изображения, которые могут быть визуализированы с использованием беспилотных летательных аппаратов 200, входящих в состав системы 500; и (c) модели построения беспилотных летательных аппаратов, каждая из которых поставлена в соответствие с одним из визуализируемых изображений и каждая из которых предусматривает размещение беспилотных летательных аппаратов 200 в заданных пространственных местоположениях по отношению друг к другу. Следует отметить, что вышеуказанные данные могут быть сообщены модулю управления беспилотного летательного аппарата 200 путем их ввода вручную оператором с обеспечением их записи в локальную базу данных беспилотного летательного аппарата 200, путем их передачи в виде пакета данных от внешнего источника управления (например, от управляющего устройства, входящего в состав системы 500) по каналу беспроводной передачи данных, установленному между модулем управления беспилотного летательного аппарата 200 и этим внешним источником управления, или могут быть получены модулем связи беспилотного летательного аппарата 200 из удаленного хранилища данных (например, из сайта, базы данных, сервера данных и т.п.), к которому этот модуль связи может иметь доступ, в ответ на запрос, полученный от модуля связи беспилотного летательного аппарата 200, или т.п.
При формировании двухмерного (2D) или трехмерного (3D) объекта с использованием беспилотных летательных аппаратов 200, направленных управляющим устройством (не показано), входящим в состав системы 500, с обеспечением их надлежащего размещения в заданной пространственной области, в соответствии с заданной моделью построения беспилотных летательных аппаратов каждый из беспилотных летательных аппаратов 200 в ответ на навигационные команды от указанного управляющего устройства (не показано) может входить в разъемное взаимодействие по меньшей мере с одним другим беспилотным летательным аппаратом из беспилотных летательных аппаратов 200, используемых для формирования указанного объекта. Таким образом, беспилотные летательные аппараты 200 должны быть снабжены каждый средствами взаимодействия или по меньшей мере одним средством взаимодействия для обеспечения возможности разъемного взаимодействия друг с другом при формировании требуемого двухмерного или трехмерного объекта в воздухе.
В качестве альтернативы при формировании двухмерного (2D) или трехмерного (3D) объекта с использованием беспилотных летательных аппаратов 200, направленных управляющим устройством (не показано), входящим в состав системы 500, с обеспечением их надлежащего размещения в заданной пространственной области, в соответствии с заданной моделью построения беспилотных летательных аппаратов каждый из беспилотных летательных аппаратов 200 в ответ на навигационные команды от указанного управляющего устройства (не показано) может занимать и поддерживать в течение заданного периода времени строго заданное пространственное положение, в котором этот беспилотный летательный аппарат 200 физически не взаимодействует ни с одним из остальных беспилотных летательных аппаратов 200, используемых для формирования указанного объекта в воздухе. В таком альтернативном варианте реализации настоящего изобретения беспилотные летательные аппараты 200 могут дополнительно содержать по меньшей мере сенсор обнаружения препятствий (например, лидар, УЗ-датчик, ИК-сенсор, радар, видеосенсор и т.п.), сенсор позиционирования (например, гиросенсор, GPS, Глонасс, радар и т.п.) и/или иные аналогичные сенсоры для предотвращения столкновений таких беспилотных летательных аппаратов 200 в воздухе в процессе формирования требуемого двухмерного или трехмерного объекта, который предполагается использовать для визуализации изображения, и в процессе нахождения этих беспилотных летательных аппаратов 200 в составе сформированного в воздухе объекта.
Неограничивающими примерами средств для обеспечения разъемного взаимодействия беспилотных летательных аппаратов 200 друг с другом при формировании двухмерного или трехмерного объекта (например, нижеописанного составного дисплея 300), который предполагается использовать для визуализации изображения, являются следующие соединительные элементы, которыми должен быть снабжен фюзеляж 220 каждого из беспилотных летательных аппаратов 200 в соответствующих стыковочных местах: различные подходящие механические соединительные или крепежные средства (кронштейны, захваты, крепежи, монтажные пазы, зацепы, крюки, защелки, соединения типа выступ-паз и т.д.), электромеханические средства под управлением модуля управления (например, электромеханические средства стыковки для стыковки ответным пристыковываемым элементом, электромеханические средства захвата для захвата ответного захватываемого элемента, или т.п.), электромагнитные средства под управлением модуля управления, магнитные средства, вакуумные захваты под управлением модуля управления и/или т.д. Следует отметить, что если первый беспилотный летательный аппарат 200 снабжен любым соединительным элементом из вышеперечисленных механических соединительных или крепежных средств, электромеханических средств, электромагнитных средств, магнитных средств и вакуумных захватов, то второй беспилотный летательный аппарат 200 для разъемного взаимодействия с первым беспилотным летательным аппаратом 200 должен быть снабжен ответным соединительным элементом подходящего типа, обеспечивающим возможность формирования разъемного соединения с соединительным элементом первого беспилотного летательного аппарата 200.
В одном из вариантов реализации настоящего изобретения средства для обеспечения разъемного взаимодействия беспилотных летательных аппаратов 200 друг с другом при формировании двухмерного или трехмерного объекта (например, нижеописанного составного дисплея 300), могут быть выполнены в виде вышеописанных соединительных или крепежных средств, при этом крепежные средства в каждом из беспилотных летательных аппаратов 200 могут быть выполнены с возможностью их развертывания, раскладывания или раздвижения для обеспечения возможности взаимного разъемного соединения указанных беспилотных летательных аппаратов 200. В одной из разновидностей данного варианта реализации настоящего изобретения крепежные средства в беспилотных летательных аппаратах 200, входящих в состав системы 500, могут быть выполнены с возможностью их выдвижения из соответствующих фюзеляжей 210 этих беспилотных летательных аппаратов 200 для обеспечения взаимного разъемного соединения указанных беспилотных летательных аппаратов 200.
В некоторых вариантах реализации настоящего изобретения система 500 для визуализации изображения может дополнительно содержать летательную решетчатую конструкцию (не показана), выполненную с возможностью размещения на ней беспилотных летательных аппаратов 200, направленных управляющим устройством в указанную область пространства, с обеспечением формирования двухмерного или трехмерного объекта (например, нижеописанного составного дисплея 300). Таким образом, в данном варианте реализации настоящего изобретения летательная решетчатая конструкция может лежать в основе двухмерного или трехмерного объекта (например, нижеописанного составного дисплея 300), формируемого из беспилотных летательных аппаратов 200. В одной из разновидностей данного варианта реализации решетчатая летательная конструкция системы 500 может быть снабжена посадочными площадками, выполненными с возможностью размещения на них беспилотных летательных аппаратов 200, направленных управляющим устройством системы 500 в заданную пространственную область, при формировании заданного двухмерного или трехмерного объекта (например, нижеописанного составного дисплея 300). В другой разновидности данного варианта реализации настоящего изобретения решетчатая летательная конструкция системы 500 может быть снабжена крепежными средствами, выполненными с возможностью взаимодействия с беспилотными летательными аппаратами 200, направленными управляющим устройством системы 500 в заданную пространственную область, при формировании заданного двухмерного или трехмерного объекта (например, нижеописанного составного дисплея 300). Еще в одной разновидности данного варианта реализации настоящего изобретения каждый из беспилотных летательных аппаратов 200, направленных управляющим устройством системы 500 в заданную пространственную область для формирования двухмерного или трехмерного объекта (например, нижеописанного составного дисплея 300), может быть снабжен крепежными средствами, выполненными с возможностью взаимодействия с решетчатой летательной конструкцией системы при формировании указанного двухмерного или трехмерного объекта.
Кроме того, фюзеляж 210 в каждом из беспилотных летательных аппаратов 200, входящих в состав системы 500, показанной на фиг. 1, снабжен одним или более бортовыми источниками питания (не показан), каждый из которых может представлять собой одну или более аккумуляторных батарей и которые могут быть установлены на фюзеляже 210 или внутри него. Следует отметить, что движители 220 в каждом из беспилотных летательных аппаратов 200, входящих в состав системы 500, показанной на фиг. 1, электрически соединены с источником питания (не показан) для приведения их в действие с обеспечением возможности перемещения беспилотного летательного аппарата 200 по воздуху.
В одном из вариантов реализации настоящего изобретения фюзеляж 210 в каждом из беспилотных летательных аппаратов 200, входящих в состав системы 500, показанной на фиг. 1, может содержать два и более отдельных или электрически связанных между собой бортовых источников питания, каждый из которых содержит одну или более аккумуляторных батарей. В другом варианте реализации настоящего изобретения каждый источник питания (не показан) может представлять собой по меньшей мере одно из группы, содержащей: генератор на основе двигателя внутреннего сгорания, генератор на основе водородного двигателя, солнечную батарею и любой иной подходящий источник энергии, известный в уровне техники и размещенный на фюзеляже 210 или внутри него. Еще в одном варианте реализации настоящего изобретения источник питания (не показан) может быть выполнен с возможностью его подключения к внешнему источнику питания (не показан), например к электрической сети.
Таким образом, при размещении любого из разряженных беспилотных летательных аппаратов 200, входящих в состав системы 500 для визуализации изображения, показанной на фиг. 1, в одной из парковочных станций 100, входящих в состав системы 500, источник питания указанного беспилотного летательного аппарата 200 может быть подключен к источнику питания указанной парковочной станции 100 с использованием зарядного устройства (не показано) этой парковочной станции 100, электрически соединенного с указанным источником питания парковочной станции 100, с обеспечением зарядки или восполнения запаса хода указанного беспилотного летательного аппарата 200.
Другими словами, управляющее устройство системы 500 может быть дополнительно выполнено с возможностью направления каждого разряженного беспилотного летательного аппарата из беспилотных летательных аппаратов 200, используемых для визуализации изображения, на одну из парковочных станций 100 с обеспечением возможности его подключения к одному из зарядных устройств, которыми может быть снабжена указанная парковочная станция 100, для восполнения запаса хода разряженного беспилотного летательного аппарата. Кроме того, при расформировании двухмерного или трехмерного объекта управляющее устройство системы 500 также может быть дополнительно выполнено с возможностью направления каждого беспилотного летательного аппарата 200, который был использован для формирования указанного двухмерного или трехмерного объекта в воздухе, на одну из парковочных станций 100 с обеспечением возможности его подключения к одному из зарядных устройств, которыми может быть снабжена указанная парковочная станция 100, при размещении направленного беспилотного летательного аппарата 100 в указанной парковочной станции 100 или на ней, что позволяет восполнить запас хода указанного беспилотного летательного аппарата 200. Кроме того, управляющее устройство системы 500 может быть дополнительно выполнено с возможностью выдачи навигационных команд на беспилотные летательные аппараты 200, использованные для формирования в воздухе двухмерного или трехмерного объекта, по истечению заданного периода времени с обеспечением возможности направления указанных беспилотных летательных аппаратов 200 на соответствующие парковочные станции 100, в том числе для восполнения их запаса хода вышеописанным образом.
Следует отметить, что любой из источников питания в любом из беспилотных летательных аппаратов 200, входящих в состав системы 500 для визуализации изображения, показанной на фиг. 1, может быть использован не только для подачи энергии питания на движители 220 указанного беспилотного летательного аппарата 200 для его перемещения по воздуху, но и для подачи питания на модуль управления (не показан) этого беспилотного летательного аппарата 200, различные датчики и измерительные устройства, используемые в этом беспилотном летательном аппарате 200 и описанные в данном документе, и на иные подвижные и/или электронные компоненты, используемые в беспилотном летательном аппарате 200 и описанные в данном документе, однако специалисту в данной области техники должно быть очевидно, что указанные компоненты могут иметь каждый и свой источник питания, установленный каждый внутри корпуса соответствующего компонента.
В одном из вариантов реализации настоящего изобретения по меньшей мере одна из парковочных станций 100, входящих в состав системы 500 для визуализации изображения, может быть снабжена зарядным устройством, выполненным, например, в виде устройства для подачи электрической энергии, устройства для подачи жидкого или газообразного топлива и/или подобного устройства для восполнения запаса хода беспилотного летательного аппарата 200, а беспилотные летательные аппараты 200, входящие в состав системы 500, могут быть выполнены с возможностью последовательного или параллельного функционального соединения друг с другом (например, электрически и/или посредством линии для подачи топлива) при размещении в указанной парковочной станции или на ней с обеспечением возможности их подключения к указанному зарядному устройству (не показано) для их по существу одновременной зарядки (например, зарядки или дозарядки аккумуляторных батарей в таких беспилотных летательных аппаратах 200) и/или по существу одновременного восполнения их запаса хода (например, зарядки аккумуляторных батарей и/или дозаправки топливом топливных баков в таких беспилотных летательных аппаратах 200).
Кроме того, каждый из беспилотных летательных аппаратов 200, входящих в состав системы 500, может дополнительно содержать по меньшей мере один из следующих сенсоров: сенсор обнаружения препятствий (лидар, УЗ-датчик, ИК-сенсор, радар, видеосенсор и т.п.), сенсор позиционирования (гиросенсор, GPS, Глонасс, радар и т.п.) и иные подходящие сенсоры, известные в уровне техники, при этом каждый из указанных сенсоров может быть выполнен с возможностью выдачи своих показаний в реальном времени на модуль управления (не показан) указанного беспилотного летательного аппарата 200 или управляющее устройство (не показано), входящее в состав системы 500. Кроме того, каждый из беспилотных летательных аппаратов 200, входящих в состав системы 500, может дополнительно содержать датчик уровня заряда батареи, выполненный с возможностью определения запаса заряда батареи беспилотного летательного аппарата 200 и с возможностью выдачи в реальном времени указанного запаса заряда батареи на модуль управления (не показан) указанного беспилотного летательного аппарата 200 или управляющее устройство (не показано), входящее в состав системы 500.
В ином варианте реализации настоящего изобретения каждый из беспилотных летательных аппаратов 200, входящих в состав системы 500, может быть снабжен по меньшей мере одним источником питания и может быть дополнительно выполнен с возможностью выдачи в реальном времени данных о запасе хода на управляющее устройство системы 500 или модуль управления указанного беспилотного летательного аппарата 200, а указанный модуль управления или указанное управляющее устройство может быть дополнительно выполнено с возможностью приема в реальном времени данных об уровне заряда батареи от каждого из беспилотных летательных аппаратов 200 с обеспечением возможности замены по меньшей мере одного из указанных беспилотных летательных аппаратов 200 по меньшей мере на один из беспилотных летательных аппаратов 200, размещенных в парковочных станциях 100, в случае, если запас заряда каждого заменяемого беспилотного летательного аппарата 200 ниже заданного порогового значения.
В одном из вариантов реализации настоящего изобретения модуль управления (не показан) в каждом из беспилотных летательных аппаратов 200, используемых для формирования двухмерного или трехмерного объекта, который предполагается использовать для визуализации изображения, может быть выполнен с возможностью приема данных о запасе хода указанного беспилотного летательного аппарата 200 и может обеспечивать возможность выхода указанного беспилотного летательного аппарата 200 из взаимодействия по меньшей мере с одним другим беспилотным летательным аппаратом из числа беспилотных летательных аппаратов 200, используемых для формирования двухмерного или трехмерного объекта, в случае, если запас хода указанного беспилотного летательного аппарата 200 ниже заданного порогового значения (т.е. аккумуляторная батарея беспилотного летательного аппарата 200 полностью разряжена или имеет недостаточный уровень заряда, меньший заданного порогового значения, и/или в топливном баке беспилотного летательного аппарата 200 нет топлива или имеется недостаточный уровень топлива, меньший заданного порогового значения) с обеспечением возможности его направления на одну из парковочных станций 100, соответствующих заданной пространственной области, в которой был сформирован указанный двухмерный или трехмерный объект.
Следует отметить, что в данном варианте реализации настоящего изобретения при размещении на парковочной станции 100 или в ней источник питания (не показан) разряженного беспилотного летательного аппарата 200 может быть электрически подключен к зарядному устройству, которым может быть снабжена указанная парковочная станция 100, для восполнения запаса хода этого беспилотного летательного аппарата 200, например путем восполнения заряда аккумуляторной батареи беспилотного летательного аппарата 200, восполнения топлива в топливном баке беспилотного летательного аппарата 200, восполнения рабочей среды (жидкой, твердой или газообразной), используемой в генераторе беспилотного летательного аппарата 200, работающем с использованием указанной рабочей среды, и/или т.п.
Следует также отметить, что в данном варианте реализации настоящего изобретения модуль управления (не показан) разряженного беспилотного летательного аппарата 200 может быть дополнительно выполнен с возможностью выдачи запроса на управляющее устройство (не показано), входящее в состав системы 500, на подзарядку или восполнение запаса хода указанного разряженного беспилотного летательного аппарата 200. Управляющее устройство системы 500 в свою очередь в ответ на запрос о подзарядке или восполнении запаса хода разряженного беспилотного летательного аппарата 200, полученный от модуля управления (не показан) указанного разряженного беспилотного летательного аппарата 200, может быть дополнительно выполнено с возможностью выдачи запроса на парковочные станции 100, входящие в состав системы 500, для установления свободного зарядного устройства, а каждая из парковочных станций 100, входящих в состав системы 500, может быть выполнена с возможностью выдачи данных о свободных зарядных устройствах на управляющее устройство системы 500 в ответ на указанный запрос для установления свободного зарядного устройства. В ответ на данные о свободных зарядных устройствах от парковочных станций 100, входящих в состав системы 500, управляющее устройство системы 500 может быть дополнительно выполнено с возможностью выдачи управляющих инструкций на модуль управления разряженного беспилотного летательного аппарата 200 с обеспечением возможности направления указанного разряженного (требующего подзарядки или восполнения запаса хода) беспилотного летательного аппарата 200 под управлением модуля управления беспилотного летательного аппарата 200 или управляющего устройства системы 500 к одному из выявленных свободных зарядных устройств (не показаны) при размещении разряженного беспилотного летательного аппарата 200 в парковочной станции 100 с указанным свободным зарядным устройством.
В одном из вариантов реализации настоящего изобретения фюзеляж 220 в каждом из беспилотных летательных аппаратов 200, входящих в состав системы, показанной на фиг. 1, может быть дополнительно снабжен модулем определения местоположения (например, GPS-системой, Глонасс-системой, Beidou-системой или любой иной подходящей системой определения местоположения, известной в уровне техники), выполненным с возможностью определения пространственных координат указанного беспилотного летательного аппарата 200 в реальном времени, и может быть выполнен с возможностью выдачи определенных пространственных координат на управляющее устройство системы 500 в реальном времени, а управляющее устройство системы 500 в свою очередь может быть дополнительно выполнено с возможностью выдачи навигационных команд на беспилотные летательные аппараты 200 в реальном времени для изменения их курса перемещения в случае установления на основании их пространственных координат, что расстояние между ними меньше заданного порогового значения, что предотвращает или исключает возможность столкновения беспилотных летательных аппаратов 200 друг с другом при их направлении в заданную область пространства, при их размещении в соответствующих пространственных местоположениях в указанной пространственной области в соответствии с конкретной моделью построения беспилотных летательных аппаратов 200 и/или при их возврате из указанной пространственной области в соответствующие парковочные станции 100.
В другом варианте реализации настоящего изобретения фюзеляж 220 в каждом из беспилотных летательных аппаратов 200, входящих в состав системы 500, показанной на фиг. 1, может быть дополнительно снабжен устройством обнаружения (не показано), выполненным с возможностью выявления или обнаружения в области действия по меньшей мере одного другого беспилотного летательного аппарата из беспилотных летательных аппаратов 200, используемых в заданной пространственной области для формирования требуемого двухмерного или трехмерного объекта, который предполагается в дальнейшем использовать для визуализации изображения одним из способов, описанных в данном документе, и с возможностью определения расстояния до каждого из указанных обнаруженных беспилотных летательных аппаратов 200. В таком варианте реализации настоящего изобретения устройство обнаружения (не показано) может быть дополнительно соединено с модулем управления (не показан) воздушного летательного аппарата 200 с возможностью выдачи на него данных об обнаруженных беспилотных летательных аппаратах, попавших в поле зону действия устройства обнаружения, и данных о расстояниях от обнаруженных беспилотных летательных аппаратов 200 до указанного воздушного летательного аппарата 200, а модуль управления в свою очередь может быть дополнительно выполнен с возможностью изменения пространственного местоположения, курса перемещения и/или режима работы указанного воздушного летательного аппарата 200 в случае, если расстояние хотя бы до одного из обнаруженных беспилотных летательных аппаратов 200 меньше заданного порогового значения. В качестве альтернативы в настоящем варианте реализации модуль управления (не показан) воздушного летательного аппарата 200 может быть выполнен с возможностью выдачи данных об обнаруженных беспилотных летательных аппаратах, попавших в поле зону действия устройства обнаружения, и данных о расстояниях от обнаруженных беспилотных летательных аппаратов 200 до указанного воздушного летательного аппарата 200, на управляющее устройство системы 500, а указанное управляющее устройство в свою очередь может быть дополнительно выполнено с возможностью изменения пространственного местоположения, курса перемещения и/или режима работы указанного воздушного летательного аппарата 200 в случае, если расстояние хотя бы до одного из обнаруженных беспилотных летательных аппаратов 200 меньше заданного порогового значения. Следует отметить, что в данном варианте реализации настоящего изобретения в качестве устройства обнаружения (не показано) может быть использована фотокамера, видеокамера, лидар, радар, ИК-сенсор, УЗ-датчик, RFID-метка и т.п. В одной из разновидностей данного варианта реализации настоящего изобретения устройство обнаружения может быть выполнено в виде устройства фиксации изображений, выполненного с возможностью фиксации изображений в поле обзора в реальном времени с обеспечением возможности выявления в указанном поле обзора по меньшей мере одного другого беспилотного летательного аппарата из беспилотных летательных аппаратов 200, используемых в заданной пространственной области для формирования требуемого двухмерного или трехмерного объекта, который предполагается в дальнейшем использовать для визуализации изображения одним из способов, описанных в данном документе, и с возможностью определения расстояния до каждого из указанных обнаруженных беспилотных летательных аппаратов 200. В данной разновидности варианта реализации настоящего изобретения модуль управления воздушного летательного аппарата 200 или управляющее устройство системы 500 могут аналогичным образом обеспечивать возможность изменения пространственного местоположения, курса перемещения и/или режима работы указанного воздушного летательного аппарата 200 в случае, если расстояние хотя бы до одного из обнаруженных беспилотных летательных аппаратов 200 меньше заданного порогового значения, при этом в качестве такого устройства фиксации изображений (не показано) может быть использована фотокамера, видеокамера, видеорегистратор, видеорадар и т.п.
Еще в одном варианте реализации настоящего изобретения фюзеляж 220 в каждом из беспилотных летательных аппаратов 200, входящих в состав системы 500, показанной на фиг. 1, может быть дополнительно снабжен по меньшей мере одним роботизированным захватным манипулятором или захватом (не показан), находящимся под управлением модуля управления (не показан) указанного беспилотного летательного аппарата 200, при этом фюзеляж 210 может быть дополнительно снабжен устройством фиксации изображений (не показано), выполненным с возможностью фиксации изображений в поле обзора в реальном времени с обеспечением возможности выявления в указанном поле обзора по меньшей мере одного из беспилотных летательных аппаратов 200, находящихся в заданной пространственной области, и дополнительно соединенным с указанным модулем управления с возможностью выдачи на него данных о выявленных беспилотных летательных аппаратах, а модуль управления в свою очередь может быть дополнительно выполнен с возможностью приведения в действие указанного захвата в ответ на указанные данные о выявленных беспилотных летательных аппаратах, полученные от указанного захвата, с обеспечением возможности осуществления разъемного захвата указанного выявленного беспилотного летательного аппарата 200. Следует отметить, что в данном варианте реализации настоящего изобретения в качестве такого устройства фиксации изображений может быть использована фотокамера, видеокамера, видеорегистратор, видеорадар или т.п. Следует также отметить, что в данном варианте реализации настоящего изобретения к беспилотным летательным аппаратам, захватываемых захватом, могут относиться беспилотные летательные аппараты 200, выпущенные по меньшей мере из одной из парковочных станций 100, входящих в состав системы 500, и направленные в заданную пространственную область, беспилотные летательные аппараты из парковочных станций, входящих в состав других систем для визуализации изображения, аналогичных системе 500, и/или любые иные беспилотные летательные аппараты, которые могут быть направлены в заданную область пространства для формирования в ней требуемого двухмерного или трехмерного объекта в рамках предлагаемой технологии, описанной в данном документе.
В одном из вариантов реализации настоящего изобретения по меньшей мере два из беспилотных летательных аппаратов 200, входящих в состав системы 500, показанной на фиг. 1, могут быть выполнены с возможностью механического соединения друг с другом с образованием составного беспилотного летательного аппарата. Такие составные беспилотные летательные аппараты выполнены каждый с возможностью разъемного взаимодействия между собой и/или по меньшей мере с одним из остальных беспилотных летательных аппаратов 200. Следует отметить, что такой составной беспилотный летательный аппарат (не показан), образованный из нескольких беспилотных летательных аппаратов 200, механически соединенных между собой, может быть изначально размещен в собранном или состыкованном состоянии в одной из парковочных станций 100 или же может быть из отдельных беспилотных летательных аппаратов 200, направленных из соответствующих парковочных станций 100 в заданную пространственную область. Следует отметить, что беспилотные летательные аппараты 200, образующие такой составной беспилотный летательный аппарат (не показан), могут быть механически соединены друг с другом в горизонтальной плоскости и/или вертикальной плоскости с образованием летательной конструкции из соединенных между собой беспилотных летательных аппаратов 200, имеющей любые форму и геометрические размеры, подходящие для взаимодействия такого составного беспилотного летательного аппарата (не показан) по меньшей мере с одним другим подобных составным беспилотным летательным аппаратом и/или по меньшей мере с одним отдельным беспилотным летательным аппаратом 200, подходящие для свободного перемещения такого составного беспилотного летательного аппарата (не показан) в одной из парковочных станций 100 и подходящие для свободного перемещения такого составного беспилотного летательного аппарата (не показан) по воздуху в отдельности или в составе двухмерного или трехмерного объекта, используемого для визуализации изображения. Такой составной беспилотный летательный аппарат (не показан) может реагировать на управляющие или навигационные инструкции/команды как единое целое, т.е. работа беспилотных летательных аппаратов 200 в таком составном беспилотном летательном аппарате может быть синхронизирована (например, с помощью управляющего устройства системы 500 или модуля управления одного из беспилотных летательных аппаратов 200, образующих такой составной беспилотный летательный аппарат). Кроме того, беспилотные летательные аппараты 200, образующие такой составной беспилотный летательный аппарат (не показан), могут быть электрически соединены друг с другом с образованием единой схемы питания и составного источника питания (например, составной источник питания может быть образован из аккумуляторных батарей соединяемых между собой беспилотных летательных аппаратов 200), подающего питание или питающего все указанные беспилотные летательные аппараты 200 по существу одновременно, что позволяет говорить о запасе хода не каждого такого беспилотного летательного аппарата 200 в отдельности, а о запасе хода составного беспилотного летательного аппарата (не показан) в целом. Следует также отметить, что процесс взаимного механического соединения беспилотных летательных аппаратов 200 может быть начат или запущен в ответ на управляющие команды, выданные управляющим устройством системы 500 для визуализации изображения или модулем управления одного из беспилотных летательных аппаратов 200, образующих такой составной беспилотный летательный аппарат, на указанные беспилотные летательные аппараты 200. Кроме того, взаимное механическое соединение между беспилотными летательными аппаратами 200, образующими составной беспилотный летательный аппарат (не показан), может быть реализовано как непосредственно между корпусами или телами соединяемых беспилотных летательных аппаратов 200, так и посредством соединительной конструкции (не показана), с которой могут быть скреплены или соединены указанные соединяемые беспилотные летательные аппараты 200 (например, с использованием крепежных или соединительных средств, известных в уровне техники) и которую указанные соединяемые беспилотные летательные аппараты 200 в совокупности способны переносить по воздуху. Такая соединительная конструкция может быть выполнена в виде наземной конструкции, с которой соединяемые между собой беспилотные летательные аппараты 200 могут быть скреплены или соединены при ее нахождении на поверхности земли, при этом указанная соединительная конструкция может быть выполнена раздвижной или развертываемой, что позволяет указанным беспилотным летательным аппаратам 200 раздвигать или развертывать указанную соединительную конструкцию как на поверхности земли, так и в воздухе при приложении к ней тяговых усилий со стороны беспилотных летательных аппаратов 200. Кроме того, такая соединительная конструкция может быть выполнена в виде летательной конструкции, которая выполнена с возможностью независимого перемещения или полета в воздухе и с которой соединяемые между собой беспилотные летательные аппараты 200 могут быть скреплены или соединены при ее нахождении в воздухе, при этом указанная соединительная конструкция может быть выполнена раздвижной или развертываемой, что позволяет указанным беспилотным летательным аппаратам 200 раздвигать или развертывать указанную соединительную конструкцию в воздухе при приложении к ней тяговых усилий со стороны беспилотных летательных аппаратов 200.
Следует также отметить, что вышеописанный составной беспилотный летательный аппарат (не показан) может быть образован из беспилотных летательных аппаратов 200, размещенных по меньшей мере из одной парковочной станции из парковочных станций 100, входящих в состав системы 500, беспилотных летательных аппаратов 200, направленных в заданную пространственную область по меньшей мере из одной из парковочных станций 100, входящих в состав системы 500, беспилотных летательных аппаратов 200, находящихся в заданной пространственной области в составе двухмерного или трехмерного объекта, используемого для визуализации изображения, и/или беспилотных летательных аппаратов, выпущенных по меньшей мере из одной из парковочных станций, входящих в состав по меньшей мере одной другой системы для визуализации изображения, схожей с системой 500.
При разрядке составной беспилотный летательный аппарат (не показан), входящий в состав сформированного двухмерного или трехмерного объекта, используемого для визуализации изображения, может быть заменен в воздухе на другой (заряженный) составной беспилотный летательный аппарат в процессе визуализации изображения или в процессе размещения указанного разряженного составного беспилотного летательного аппарата в одной из парковочных станций 100. При замене разряженного составного беспилотного летательного аппарата (не показан) на заряженный составной беспилотный летательный аппарат указанный разряженный составной беспилотный летательный аппарат может быть направлен на одну из парковочных станций 100 для размещения в ней или на ней с обеспечением возможности дальнейшего хранения в указанной парковочной станции 100 и/или возможности восполнения запаса хода такого составного беспилотного летательного аппарата. В качестве альтернативы при замене разряженного составного беспилотного летательного аппарата (не показан) на заряженный составной беспилотный летательный аппарат беспилотные летательные аппараты 200, входящие в состав указанного разряженного составного беспилотного летательного аппарата (не показан), вышедшего из состава двухмерного или трехмерного объекта, сформированного в воздухе в заданной пространственной области, могут быть выведены из взаимодействия друг с другом (т.е. могут разлететься в стороны с обеспечением расформирования такого составного беспилотного летательного аппарата на отдельные беспилотные летательные аппараты 200) с обеспечением возможности направления каждого из них на одну из парковочных станций 100, что позволяет разместить разряженные беспилотные летательные аппараты 200 в парковочных станциях 200 с обеспечением возможности их дальнейшего хранения в этих парковочных станции 100 и/или возможности восполнения запаса хода по меньшей мере одного из этих беспилотных летательных аппаратов 200.
Первый вариант реализации беспилотного летательного аппарата
На фиг. 2 схематично показан один из иллюстративных вариантов реализации (первый вариант реализации) беспилотного летательного аппарата, в виде которого может быть реализован каждый из вышеописанных беспилотных летательных аппаратов 200, используемых в составе системы 500 для визуализации изображения, показанной на фиг. 1.
Беспилотный летательный аппарат 200, показанный на фиг. 2, содержит фюзеляж 210 и два движителя 220, установленных или закрепленных на фюзеляже 210, и снабжен отображающим устройством или дисплеем 230, который выполнен с возможностью отображения статического или динамического изображения и соединен с возможностью обмена данными с модулем управления (не показан) беспилотного летательного аппарата 200, который в свою очередь выполнен с возможностью установления соединения с обеспечением возможности обмена данными с вышеописанным управляющим устройством (не показано), входящим в состав системы 500, при этом указанный модуль управления дополнительно выполнен с возможностью управления работой дисплея 230, в том числе в ответ на данные или управляющие инструкции, принимаемые от управляющего устройства системы 500.
В одном из вариантов реализации настоящего изобретения беспилотный летательный аппарат 200, показанный на фиг. 2, может быть снабжен по меньшей мере одним дисплеем 230, в частности может быть снабжен двумя, тремя, четырьмя, пятью, шестью, семью, восемью, девятью, десятью или большим количеством дисплеев 230, выполненных каждый с возможностью отображения статического или динамического изображения при его включении или приведении в действие, при этом указанные дисплеи 230 могут быть закреплены на фюзеляже 210 таким образом, что между ними отсутствуют какие-либо промежутки или что они расположены на заданном расстоянии друг от друга. Следует отметить, что в таком варианте реализации настоящего изобретения дисплеи 230 в каждом беспилотном летательном аппарате 200, показанном на фиг. 2, могут быть расположены в одной плоскости с одной из сторон фюзеляжа 230, могут быть расположены под углом по отношению друг к другу с одной из сторон фюзеляжа 230 или могут быть расположены с разных сторон фюзеляжа 230.
При направлении беспилотных летательных аппаратов 200 по фиг. 2 в заданную пространственную область управляющее устройство системы 500, управляющее работой этих беспилотных летательных аппаратов 200 путем выдачи управляющих и/или навигационных команд на их модули управления, обеспечивает возможность размещения каждого из указанных направленных беспилотных летательных аппаратов 200 в заданном пространственном местоположении в соответствии с заданной моделью построения беспилотных летательных аппаратов (описана выше), известной управляющему устройству системы 500, для формирования в воздухе по меньшей мере одного составного дисплея 300, показанного на фиг. 1, из дисплеев 230, каждый из которых соответствует одному из этих беспилотных летательных аппаратов 200, при этом указанный сформированный составной дисплей 300 по сути является одним из конкретных вариантов реализации вышеописанного двухмерного или трехмерного объекта, формируемых в воздухе при реализации вышеописанной системы 500 для визуализации изображения. Таким образом, в заданной пространственной области в воздухе может быть параллельно или последовательно сформировано два и более составных дисплеев 300 с использованием дисплеев 230, входящих в состав беспилотных летательных аппаратов 200, направленных управляющим устройством системы 500 из соответствующих парковочных станций 100 в указанную пространственную область.
В одном из вариантов реализации настоящего изобретения беспилотные летательные аппараты 200, дисплеи 230 которых используются для формирования составного дисплея 300, могут быть размещены в воздухе в своих заданных пространственных местоположениях, соответствующих конкретной модели построения беспилотных летательных аппаратов, таким образом, что указанные дисплеи 230 могут находиться на расстоянии друг от друга (т.е. с образованием между ними промежутков, в которых исключена возможность визуализации изображения) или могут быть расположены вплотную друг к другу с образованием в целом непрерывной отображающей или дисплейной области для визуализации изображения.
В другом варианте реализации настоящего изобретения беспилотные летательные аппараты 200, дисплеи 230 которых используются для формирования составного дисплея 300, могут быть размещены в воздухе в своих заданных пространственных местоположениях, соответствующих конкретной модели построения беспилотных летательных аппаратов, таким образом, что указанные дисплеи 230 могут формировать в воздухе по существу двухмерный составной дисплей 300, в котором беспилотные летательные аппараты 200 находится в одной и той же плоскости и который имеет в целом форму известного двухмерного геометрического объекта (например, форму прямоугольника, квадрата, треугольника, трапеции, параллелограмма, круга, овала или т.п.) или любую иную подходящую двухмерную форму, или трехмерный дисплей, который имеет в целом форму известного трехмерного геометрического объекта (например, форму куба, пирамиды, параллелепипеда, сферы и т.п.) или любую иную подходящую трехмерную форму.
Еще в одном варианте реализации настоящего изобретения беспилотные летательные аппараты 200, дисплеи 230 которых используются для формирования составного дисплея 300, могут быть размещены в воздухе в своих заданных пространственных местоположениях, соответствующих конкретной модели построения беспилотных летательных аппаратов, таким образом, что указанные дисплеи 230 могут формировать в воздухе составной дисплей 300, имеющий любую криволинейную форму, выгнутую форму, выпуклую форму, неправильную форму или т.п.
В некотором другом варианте реализации настоящего изобретения беспилотные летательные аппараты 200, дисплеи 230 которых используются для формирования составного дисплея 300, могут быть размещены в воздухе в своих заданных пространственных местоположениях, соответствующих конкретной модели построения беспилотных летательных аппаратов, таким образом, что указанные дисплеи 230, формирующие в воздухе составной дисплей 300, смещены в пространстве по отношению друг к другу по меньшей мере по одной из трех координатных осей (x,y,z), например по одной из двух координатных осей, соответствующих вертикали и горизонтали, или по обеим этим координатным осям одновременно, так что что составной дисплей 300 может иметь вогнутую форму, выпуклую форму, неправильную или криволинейную форму.
В некоторых вариантах реализации настоящего изобретения каждый из беспилотных летательных аппаратов 200 может быть дополнительно выполнен с возможностью выдачи в реальном времени данных о работе своего дисплея 230 на управляющее устройство системы 500 с обеспечением возможности его замены по меньшей мере на один другой беспилотный летательный аппарат 200, входящий в состав системы 500, по меньшей мере из одной из парковочных станций 100, входящих в состав системы 500, в случае поломки или выхода из строя указанного дисплея 230, при этом указанный процесс замены может быть по существу осуществлен аналогично вышеописанному процессу замены разряженного беспилотного летательного аппарата 200 на заряженный беспилотный летательный аппарат 200.
Каждый из дисплеев 230 в беспилотных летательных аппаратах 200 может представлять собой один из группы дисплеев, содержащей: LCD-дисплей, LED-дисплей, OLED-дисплей, AMOLED-дисплей, DLP-дисплей, TFT-дисплей, IPS-дисплей, TN-дисплей, STN-дисплей, CSTN-дисплей, FSTN-дисплей, DSTN-дисплей, DLP-дисплей, TFD-дисплей, LTPS-дисплей, UFB-дисплей, CRT-дисплей, PDP-дисплей, лазерный дисплей и т.п.
Управляющее устройство (не показано) системы 500 выполнено с возможностью выдачи данных об изображении на беспилотные летательные аппараты 200, которые были направлены в заданную пространственную область и дисплеи 230 которых используются для формирования составного дисплея 300, с обеспечением возможности отображения изображения 400 по меньшей мере на части указанного составного дисплея 300. Следует отметить, в зависимости от предварительно заданных особенностей или параметров изображения 400 оно может быть отображено как на всей отображающей или дисплейной области составного дисплея 300, образованной всеми дисплеями 230, входящими в состав составного дисплея 300, так и только на части отображающей или дисплейной области составного дисплея 300, образованной частью дисплеев 230, входящих в состав составного дисплея 300.
В одном из вариантов реализации настоящего изобретения управляющее устройство (не показано) системы 500 может быть дополнительно выполнено с возможностью выдачи навигационных команд на беспилотные летательные аппараты 200, дисплеи 230 которых формируют составной дисплей 400, для совместного перемещения указанных беспилотных летательных аппаратов 200 в воздухе с обеспечением сохранения заданной модели построения беспилотных летательных аппаратов, что позволяет равномерно перемещать в воздухе сформированное изображение 400 без его нарушения или ухудшения его качества.
Каждое изображение 400, которое может быть визуализировано на составном дисплее 300, может быть приведено в соответствие с конкретной моделью построения беспилотных летательных аппаратов. В частности, визуализируемое изображение 400 может быть задано автоматически в зависимости от предварительно заданной или выбранной пользователем моделью построения беспилотных летательных аппаратов и/или предварительно заданной или выбранной пользователем пространственной областью, в которой необходимо визуализировать изображение указанное изображение 400. В качестве альтернативы изображение 400, которое должно быть визуализировано на составном дисплее 300, может быть выбрано или задано пользователем отдельно от области пространства, в которой необходимо визуализировать изображение, и/или отдельно от модели построения беспилотных летательных аппаратов, в частности с использованием, например, вышеописанного пользовательского устройства. Следует отметить, что изображение 400, которое должно быть визуализировано на составном дисплее 300 и которое управляющее устройство системы 500 выдает в составе данных об изображении на модули управления беспилотных летательных аппаратов 200, дисплеи 230 которых формируют составной дисплей 300, может быть предварительно загружено или записано оператором в локальную базу данных, входящую в состав управляющего устройства системы 500, или может быть передано в виде пакета данных от внешнего источника данных (например, из сайта, базы данных, сервера данных и т.п.) по каналу беспроводной передачи данных, установленному между управляющим устройством системы 500 и этим внешним источником данных, в ответ на запрос управляющего устройства системы 500, который в свою очередь может быть сгенерирован, например, в ответ на запрос пользовательского устройство, с помощью которого пользователь может выбрать указанное изображение в списке доступных для выбора изображений, которые могут быть визуализированы на составном дисплее 300.
Изображение 400, отображаемое на составном дисплее 400, может представлять собой неподвижное или статическое изображение (например, фотография, чертеж, рисунок и т.п.). Кроме того, изображение 400, отображаемое на составном дисплее 400, может представлять собой и подвижное или динамическое изображение (например, клип, презентация, видеофильм, анимированное изображение и т.п.). Кроме того, изображение 400, отображаемое на составном дисплее 400, может представлять собой любую комбинацию из статического изображения и динамического изображения.
Изображение 400, отображаемое на составном дисплее 400, может представлять собой двухмерное изображение, трехмерное изображение или их комбинацию, при этом такое двухмерное или трехмерное изображение может быть по меньшей мере частично подвижным.
Кроме того, изображение 400 может представлять собой комбинацию или сочетание из нескольких разных или одинаковых отдельных изображений, при этом часть из указанных отдельных изображений может соответствовать основному изображению, а остальная часть указанных отдельных изображений может соответствовать фону для указанного основного изображения.
Как показано на фиг. 1, беспилотные летательные аппараты 200, дисплеи 230 который формируют составной дисплей 300, образуют одну подвижную цепочку беспилотных летательных аппаратов, в которой указанные беспилотные летательные аппараты 200 перемещаются друг за другом по предварительно заданной траектории, при этом начало указанной подвижной цепочки соответствует точке входа беспилотного летательного аппарата 200 в совокупность беспилотных летательных аппаратов, формирующих составной дисплей 300 (например, в процессе первоначального формирования указанного составного дисплея 300, в процессе добавлении нового беспилотного летательного аппарата 200 для изменения формы или размеров составного дисплея 300 или в процессе замены разряженного беспилотного летательного аппарата 200 на заряженный беспилотный летательный аппарат 200), а конец указанной цепочки соответствует точке выхода беспилотного летательного аппарата 200 из совокупности беспилотных летательных аппаратов, формирующих составной дисплей 300 (например, в процессе расформирования указанного составного дисплея 300, в процессе удаления беспилотного летательного аппарата 200 для изменения формы или размеров составного дисплея 300 или в процессе направления разряженного беспилотного летательного аппарата 200 на одну из парковочных станций 100).
В частности, как показано на фиг. 1, беспилотные летательные аппараты 200, дисплеи 230 которых формируют составной дисплей 300, образуют заданное количество последовательно расположенных горизонтальных или вертикальных рядов (т.е. матрицу беспилотных летательных аппаратов 200), в каждом из которых беспилотные летательные аппараты 200 совершают перемещение друг за другом в сторону конца ряда с обеспечением возможности перехода на следующий ряд при достижении конца предыдущего ряда, при этом при достижении конца последнего ряда (т.е. конечного положения в последнем ряду), соответствующего точке выхода, управляющее устройство системы 500 обеспечивает возможность направления каждого беспилотного летательного аппарата 200 на одну из парковочных станций 100, а одновременно с выходом беспилотного летательного аппарата 200 через точку выхода управляющее устройство системы 500 обеспечивает возможность размещения другого беспилотного летательного аппарата, направленного в заданную область пространства, в которой сформирован указанный составной дисплей 300, из одной из парковочных станций 100, в начале первого ряда, соответствующего точке входа. Следует отметить, что модуль управления беспилотного летательного аппарата 200 или управляющее устройство системы 500 обеспечивает возможность включения дисплея 230, относящегося к указанному беспилотному летательному аппарату 200, в момент времени, когда указанный беспилотный летательный аппарат 200 занимает начальное положение в своей подвижной цепочке при входе через точку входа, и возможность выключения указанного дисплея 230 в момент времени, когда указанный беспилотный летательный аппарат 200 выходит из своей подвижной цепочки через точку выхода.
Кроме того, как показано на фиг. 1, беспилотные летательные аппараты 200 с восполненным запасом хода могут вылетать с соответствующих парковочных станций 100, входящих в состав системы 500, по существу одновременно или последовательно с небольшими интервалами времени с образованием в воздухе группы из двух, трех и более бесплотных летательных аппаратов, при этом управляющее устройство системы 500 обеспечивает возможность последовательного выстраивания бесплотных летательных аппаратов 200 с восполненным запасом хода из указанной группы в цепочку бесплотных летательных аппаратов с восполненным запасом хода, направленную к точке входа в совокупность беспилотных летательных аппаратов, формирующих составной дисплей 300 в заданной области пространства.
Кроме того, как показано на фиг. 1, заменяемые беспилотные летательные аппараты 200 (т.е. беспилотные летательные аппараты 200 с недостаточным запасом хода или разряженные беспилотные летательные аппараты 200) могут последовательно вылетать из совокупности беспилотных летательных аппаратов, формирующих составной дисплей 300 в заданной области пространства, через точку выхода последовательно с заданными интервалами времени с образованием в воздухе цепочки заменяемых бесплотных летательных аппаратов, направленной в сторону парковочных станций 100, входящих в состав системы 500, при этом при подлете к указанным парковочным станциям 100 бесплотные летательные аппараты 200 из указанной цепочки заменяемых бесплотных летательных аппаратов могут выходить из состава этой цепочки с образованием группы из двух, трех и более бесплотных летательных аппаратов, при этом управляющее устройство системы 500 обеспечивает возможность по существу одновременного или последовательного направления заменяемых бесплотных летательных аппаратов 200 из указанной группы в соответствующие парковочные станции 100 со свободными или незанятыми зарядными устройствами.
В одном из вариантов реализации настоящего изобретения беспилотные летательные аппараты 200, дисплеи 230 который формируют составной дисплей 300, могут образовывать одну или более подвижных цепочек беспилотных летательных аппаратов (например, две, три, четыре, пять, шесть, семь, восемь, девять, десять и более таких цепочек беспилотных летательных аппаратов), в каждой из которой указанные беспилотные летательные аппараты 200 перемещаются друг за другом по предварительно заданной траектории, при этом каждая из указанных подвижных цепочек может иметь свое начало, соответствующее точке входа беспилотного летательного аппарата 200 в указанную подвижную цепочку, и свой выход, соответствующий точке выхода беспилотного летательного аппарата 200 из указанной подвижной цепочки. Следует отметить, что в одной из разновидностей такого варианта реализации настоящего изобретения по меньшей мере часть из подвижных цепочек беспилотных летательных аппаратов может иметь общие точку входа и/или точку выхода. В этих вариантах реализации настоящего изобретения подвижные цепочки беспилотных летательных аппаратов могут как частично пересекаться друг с другом, так и не пересекаться друг с другом, при этом указанные подвижные цепочки могут быть скомбинированы друг с другом таким образом, что дисплеи 230, входящие в состав этих подвижных цепочек беспилотных летательных аппаратов и формирующие составной дисплей 300, могут обеспечивать отображение цельного изображения 400 (т.е. без каких-либо затемненных промежутков между различными частями изображения 400), могут обеспечивать отображение изображения 400 с затемненными промежутками между различными частями изображения 400 или могут обеспечивать два и более одинаковых или разных изображений, аналогичных каждое изображению 400.
В ином варианте реализации настоящего изобретения управляющее устройство системы 500 может быть дополнительно выполнено с возможностью остановки подвижной цепочки беспилотных летательных аппаратов на заданный период времени (например, одна, две, три, пять, десять секунд), достаточный для экстренного вывода по меньшей мере одного из беспилотных летательных аппаратов 200, образующих указанную подвижную цепочку, в месте или точке этой подвижной цепочке, соответствующей текущему пространственному местоположению указанного по меньшей мере одного беспилотного летательного аппарата 200 и отличной от вышеописанных точки входа и точки выхода, в случае получения от указанного по меньшей мере одного беспилотного летательного аппарата 200 данных о поломке или неисправности дисплея 230, преждевременном исчерпании запаса хода, стремительном уменьшении запаса хода, поломке или неисправности по меньшей мере одного из движителей 220, неполадках программной системы управления беспилотным летательным аппаратом 200, непредвиденном столкновении беспилотного летательного аппарата 200 с другим объектом и/или т.п.
В другом варианте реализации настоящего изобретения каждый из беспилотных летательных аппаратов 200, используемых для формирования составного дисплея 300, может быть снабжен двумя дисплеями, каждый из которых может быть выполнен аналогично вышеописанному дисплею 230 и которые могут быть размещены на указанном беспилотном летательном аппарате 200 таким образом, что они обращены в противоположные стороны по отношению друг к другу, при этом при формировании составного дисплея 300 один из указанных дисплеев 230 может образовывать одну из двух противоположных сторон составного дисплея 300, а другой из указанных дисплеев 230 может образовывать другую сторону составного дисплея 300. В таком варианте реализации настоящего изобретения управляющее устройство системы 500 может обеспечивать возможность отображения одного и того же изображения 400 с обеих сторон составного дисплея 300, отображения изображения 400 только с одной из сторон составного дисплея 300 или отображения разных изображений 400 на противоположных сторонах составного дисплея 300.
Еще в одном варианте реализации настоящего изобретения каждый из беспилотных летательных аппаратов 200, используемых для формирования составного дисплея 300, может быть снабжен двумя и более дисплеями, каждый из которых может быть выполнен аналогично вышеописанному дисплею 230 и которые могут быть размещены на указанном беспилотном летательном аппарате 200 таким образом, что они обращены в разные стороны по отношению друг к другу, при этом при формировании составного дисплея 300 каждый из указанных дисплеев 230 может образовывать одну из сторон составного дисплея 300. В таком варианте реализации настоящего изобретения управляющее устройство системы 500 может обеспечивать возможность отображения одного и того же изображения 400 с разных сторон составного дисплея 300, отображения изображения 400 только с одной из сторон составного дисплея 300 или отображения разных изображений 400 на разных сторонах составного дисплея 300.
Согласно одному из вариантов реализации настоящего изобретения беспилотные летательные аппараты 200, дисплеи 230 которых формируют составной дисплей 300, могут образовывать заданное количество последовательно расположенных горизонтальных или вертикальных рядов, в каждом из которых беспилотные летательные аппараты 200 могут совершать перемещение друг за другом в сторону конца ряда с обеспечением возможности возврата в начало указанного ряда при выходе за его пределы указанного конца ряда, при этом перемещающиеся друг за другом беспилотные летательные аппараты 200 и соответствующие возвращающиеся беспилотные летательные аппараты образуют отдельную замкнутую цепочку беспилотных летательных аппаратов, а управляющее устройство системы 500 обеспечивает возможность отображения соответствующей части изображения 400 на дисплеях 230 перемещающихся друг за другом беспилотных летательных аппаратов и возможность выключения или затемнения дисплеев 230 возвращающихся беспилотных летательных аппаратов 200. Другими словами, перемещающиеся друг за другом беспилотные летательные аппараты 200 по сути соответствуют видимой части подвижной цепочки (т.е. дисплеи 230 включены), а соответствующие возвращающиеся беспилотные летательные аппараты 200 по сути соответствуют невидимой части подвижной цепочки (т.е. дисплеи 230 выключены или затемнены). Следует отметить, что беспилотные летательные аппараты 200 с выключенными или затемненными дисплеями 230 могут возвращаться в начало своих рядов со стороны составного дисплея 300, на которой не предусмотрена возможность отображения изображения 400, при этом как только беспилотный летательный аппарат 200 входит через точку входа в начало своего ряда, то управляющее устройство системы 500 обеспечивает возможность включения его дисплея 230 с обеспечением отображения на нем соответствующей части изображения, а как только беспилотный летательный аппарат 200 выходит из конца своего ряда через точку выхода, то управляющее устройство системы 500 обеспечивает возможность выключения его дисплея 230 (т.е. дисплей 230 прекращает участвовать в отображении изображения 400 или его части до момента входа этого беспилотного летательного аппарата 200 в начало своего ряда через точку входа). В одной из разновидностей данного варианта реализации настоящего изобретения управляющее устройство системы 500 может дополнительно обеспечивать возможность замены каждого разряженного беспилотного летательного аппарата 200 на заряженный беспилотный летательный аппарат 200 из одной из парковочных станций, входящих в состав системы 500, при возврате разряженного беспилотного летательного аппарата 200 в начало соответствующего одного из рядов беспилотных летательных аппаратов, использованных для формирования составного дисплея 300, т.е. в период времени, когда разряженный беспилотный летательный аппарат 200 находится в составе невидимой части своей подвижной цепочки, при этом указанная невидимая часть подвижной цепочки может иметь по меньшей мере одно место выхода для направления разряженного беспилотного летательного аппарата 200 на одну из парковочных станций 100 для восполнения его запаса хода и по меньшей мере одно место входа для возврата указанного беспилотного летательного аппарата 200 с восполненным запасом хода (т.е. в заряженном состоянии).
Согласно другому варианту реализации настоящего изобретения управляющее устройство системы 500 может дополнительно обеспечивать возможность направления каждого разряженного беспилотного летательного аппарата 200 на одну из парковочных станций 100 для восполнения его запаса хода с использованием зарядного устройства на указанной парковочной станции 100 и возможность возврата указанного беспилотного летательного аппарата 200 с восполненным запасом хода с обеспечением замены одного из других разряженных беспилотных летательных аппаратов 200.
Согласно еще одному варианту реализации настоящего изобретения управляющее устройство системы 500 может обеспечивать возможность замены каждого разряженного беспилотного летательного аппарата 200, находящегося в составе составного дисплея 300, на заряженный беспилотный летательный аппарат 200 (т.е. на беспилотный летательный аппарат 200 с полным запасом хода или по меньшей мере частично восполненным запасом хода) при нахождении указанного разряженного беспилотного летательного аппарата 200 в пространственном местоположении в заданной пространственной области, расположенном на наименьшем расстоянии от места его зарядки, в частности до одной из парковочных станций 100 со свободным зарядным устройством.
Согласно иному варианту реализации настоящего изобретения управляющее устройство системы 500 может быть дополнительно выполнено с возможностью выдачи навигационных команд на беспилотные летательные аппараты 200, дисплеи 230 которых формируют составной дисплей 300, с обеспечением возможности перестроения в воздухе этих беспилотных летательных аппаратов 200 для изменения формы и/или размера составного дисплея 300.
Согласно другим вариантам реализации настоящего изобретения беспилотные летательные аппараты 200, дисплеи 230 которых формируют составной дисплей 300, могут быть разделены по меньшей мере на две группы, при этом беспилотные летательные аппараты 200 в одной из указанных по меньшей мере двух групп могут иметь скорость перемещения и/или направление перемещения, отличные от беспилотных летательных аппаратов 200 в другой группе из указанных по меньшей мере двух групп.
Согласно иным вариантам реализации настоящего изобретения беспилотные летательные аппараты 200, дисплеи 230 которых формируют составной дисплей 300, могут быть разделены по меньшей мере на две группы, при этом дисплеи 230, которыми снабжены беспилотные летательные аппараты 200 в одной из указанных по меньшей мере двух групп, могут иметь разные габаритные размеры, частоту обновления и/или яркость, отличные от дисплеев 230 беспилотных летательных аппаратов 200 в другой группе из указанных по меньшей мере двух групп.
Согласно некоторым вариантам реализации настоящего изобретения беспилотные летательные аппараты 200, дисплеи 230 которых формируют составной дисплей 300, могут сохранять свое пространственное местоположение в течение заданного периода времени, в частности в течение периода времени, соответствующего продолжительности отображения изображения 400 или продолжительности отображения по меньшей мере части указанного изображения 400.
Согласно некоторым иным вариантам реализации настоящего изобретения беспилотные летательные аппараты 200, дисплеи 230 которых формируют составной дисплей 300, могут быть разделены по меньшей мере на две группы, а управляющее устройство системы 500 может обеспечивать возможность отображения на части составного дисплея 300, образованной из дисплеев 230 беспилотных летательных аппаратов 200, относящихся к одной из указанных по меньшей мере двух групп, изображения, отличного от изображения, отображаемого на другой части составного дисплея 300, образованной из дисплеев 230 беспилотных летательных аппаратов 200, относящихся к другой группе из указанных по меньшей мере двух групп.
Согласно некоторым другим вариантам реализации настоящего изобретения беспилотные летательные аппараты 200, дисплеи 230 которых формируют составной дисплей 300, могут быть разделены по меньшей мере на две группы, а управляющее устройство системы 500 может обеспечивать возможность отображения одного и того же изображения 400 на одной части составного дисплея 300, образованной из дисплеев 230 беспилотных летательных аппаратов 200, относящихся к одной из указанных по меньшей мере двух групп, и на другой части составного дисплея 300, образованной из дисплеев 230 беспилотных летательных аппаратов 200, относящихся к другой группе из указанных по меньшей мере двух групп.
Согласно различным вариантам реализации настоящего изобретения по меньшей мере два из беспилотных летательных аппаратов 200, направляемых в заданную область пространства для формирования составного дисплея 300, могут быть выполнены с возможностью механического соединения друг с другом с образованием составного беспилотного летательного аппарата (не показан), выполненного с возможностью разъемного взаимодействия по меньшей мере с одним другим беспилотным летательным аппаратом из указанных беспилотных летательных аппаратов 200, входящих в состав системы 500, при формировании составного дисплея 300 и/или возможность разъемного соединения по меньшей мере с одним другим составным беспилотным летательным аппаратом при формировании составного дисплея 300, при этом управляющее устройство может обеспечивать возможность формирования составного дисплея 300 из дисплеев 230 указанных составных беспилотных летательных аппаратов и/или из комбинации дисплеев 230 указанных составных беспилотных летательных аппаратов с дисплеями 230 отдельных беспилотных летательных аппаратов 200.
В одном из вариантов реализации настоящего изобретения управляющее устройство системы 500 может обеспечивать возможность направления заряженных беспилотных летательных аппаратов 200 в заданную область пространства в количестве, соответствующем количеству беспилотных летательных аппаратов 200, дисплеи 230 которых формируют составной дисплей 300, с обеспечением возможности их по существу одновременной замены на указанные заряженные беспилотные летательные аппараты 200. В частности, в данном варианте реализации настоящего изобретения управляющее устройство системы 500 может дополнительно обеспечивать возможность формирования в заданной области пространства подменного составного дисплея из заряженных беспилотных летательных аппаратов 200, являющегося копией заменяемого составного дисплея, с обеспечением возможности замены заменяемого составного дисплея на подменный составной дисплей, при этом управляющее устройство системы 500 может по существу одновременно выдавать управляющие команды на беспилотные летательные аппараты 200, дисплеи 230 которых формируют заменяемый составной дисплей, с обеспечением выключения, затемнения или сокрытия этих дисплеев 230 и по существу одновременно выдавать управляющие команды на беспилотные летательные аппараты 200, дисплеи 230 которых формируют подменный составной дисплей, с обеспечением включения этих дисплеев 230, что либо вообще исключает перерывы в отображении изображения 400 на составном дисплее 300, либо минимизирует их длительность. В одной из разновидностей данного варианта реализации настоящего изобретения управляющее устройство системы 500 может дополнительно обеспечивать возможность отображения на подменном составном дисплее изображения 400, совпадающего с изображением 400, отображаемым замененным составным дисплеем, или изображения, являющегося продолжением визуального ряда изображения 400, отображаемого замененным составным дисплеем. В другой разновидности данного варианта реализации настоящего изобретения управляющее устройство системы 500 может дополнительно обеспечивать возможность замены заменяемого составного дисплея на подменный составной дисплей по истечению заданного периода времени.
В другом варианте реализации настоящего изобретения беспилотные летательные аппараты 200, дисплеи 230 которых формируют составной дисплей 300, могут быть разделены по меньшей мере на две группы, в каждой из которых дисплеи беспилотных летательных аппаратов формируют одну из частей составного дисплея, при этом управляющее устройство дополнительно обеспечивает возможность формирования в указанной области пространства по меньшей мере одной подменной части составного дисплея из заряженных беспилотных летательных аппаратов, направленных в указанную область пространства, с обеспечением возможности замены заменяемой части составного дисплея на указанную подменную часть составного дисплея. При замене заменяемой части составного дисплея на подменную часть составного дисплея управляющее устройство по существу одновременно выдает управляющие команды на беспилотные летательные аппараты, дисплеи которых формируют заменяемую часть составного дисплея, с обеспечением выключения, затемнения или сокрытия этих дисплеев и управляющие команды на беспилотные летательные аппараты, дисплеи которых формируют подменную часть составного дисплея, с обеспечением включения этих дисплеев.
Еще в одном варианте реализации настоящего изобретения каждый из беспилотных летательных аппаратов 200 может быть снабжен по меньшей мере одним источником питания и может быть дополнительно выполнен с возможностью выдачи в реальном времени данных о запасе хода на управляющее устройство системы 500, что обеспечивает возможность направления (например, в ответ на навигационные команды управляющего устройства системы 500) каждого разряженного беспилотного летательного аппарата из беспилотных летательных аппаратов 200, дисплеи которых формируют составной дисплей 300, на одну из парковочных станций 100, входящих в состав системы 500, и дополнительно обеспечивает возможность перестроения оставшихся беспилотных летательных аппаратов 200, дисплеи 230 которых задействованы в формировании составного дисплея 300, для изменения или сохранения формы и/или размера составного дисплея 300.
В ином варианте реализации настоящего изобретения управляющее устройство системы 500 может быть дополнительно выполнено с возможностью направления в заданную область пространства дополнительных беспилотных летательных аппаратов 200 по меньшей мере из одной из парковочных станций 100, входящих в состав системы 500, с обеспечением возможности их встраивания в структуру составного дисплея 300 для изменения формы и/или размера этого составного дисплея 300.
В некотором варианте реализации настоящего изобретения беспилотные летательные аппараты 200, дисплеи 230 которых формируют составной дисплей 300, могут быть разделены на группы, в каждой из которых дисплеи 230 беспилотных летательных аппаратов 200 могут формировать одну из частей составного дисплея 300, при этом при формировании составного дисплея 300 управляющее устройство системы 500 может обеспечивать возможность построения указанных беспилотных летательных аппаратов 200 таким образом, что по меньшей мере одна из указанных частей составного дисплея 300 может форму и/или размеры, отличные от остальных частей составного дисплея 300.
В некотором ином варианте реализации настоящего изобретения каждый из беспилотных летательных аппаратов 200 может быть снабжен по меньшей мере одним источником питания, а указанная система 500 может дополнительно содержать лазерную установку (не показана), выполненную с возможностью излучения лазерного луча, при этом каждый из беспилотных летательных аппаратов 200 может быть снабжен приемником-преобразователем лазерного излучения (не показан), электрически соединенным с источником питания и выполненным с возможностью преобразования принятого лазерного луча в электрический ток с обеспечением возможности зарядки указанного источника питания. В данном варианте реализации настоящего изобретения каждый из беспилотных летательных аппаратов 200 может быть дополнительно выполнен с возможностью выдачи в реальном времени данных о запасе хода на управляющее устройство системы 500, а управляющее устройство системы 500 в свою очередь может быть дополнительно выполнено с возможностью управления работой лазерной установки (не показана) с обеспечением возможности направления лазерного луча на беспилотный летательный аппарат 200, запас хода которого ниже заданного порогового значения.
В некотором другом варианте реализации настоящего изобретения управляющее устройство системы 500 может быть выполнено с возможностью выдачи навигационных команд на беспилотные летательные аппараты 200, дисплеи 230 которых формируют составной дисплей 300, для их направления по меньшей мере на одну из парковочных станций 100, входящих в состав системы 500, по истечению заданного периода времени.
В других вариантах реализации настоящего изобретения управляющее устройство системы 500 может быть выполнено с возможностью по существу одновременной или последовательной выдачи навигационных команд на беспилотные летательные аппараты 200, дисплеи 230 которых формируют составной дисплей 300, для их направления по меньшей мере на одну из парковочных станций 100, входящих в состав системы 500.
В иных вариантах реализации настоящего изобретения управляющее устройство системы 500 может быть выполнено с возможностью выдачи навигационных команд на беспилотные летательные аппараты 200, дисплеи 230 которых формируют составной дисплей 300, для их направления группами или друг за другом меньшей мере на одну из парковочных станций 100, входящих в состав системы 500.
В некоторых вариантах реализации настоящего изобретения управляющее устройство системы 500 может быть дополнительно выполнено с возможностью выдачи навигационных команд на заряженные беспилотные летательные аппараты 200 (т.е. беспилотные летательные аппараты 200 с запасом хода, восполненным с использованием зарядных устройств на парковочных станциях 100) с обеспечением возможности их возврата в свои первоначальные пространственные местоположения для повторного формирования того же самого составного дисплея 300.
В некоторых иных вариантах реализации настоящего изобретения беспилотные летательные аппараты 200, дисплеи 230 которых формируют составной дисплей 300, могут быть выполнены с возможностью автоматического перемещения по меньшей мере на одну из парковочных станций, входящих в состав системы 500, по истечению заданного периода времени.
В некоторых других вариантах реализации настоящего изобретения беспилотные летательные аппараты 200, дисплеи 230 которых формируют составной дисплей 300, могут быть выполнены с возможностью автоматического перемещения по меньшей мере на одну из парковочных станций, входящих в состав системы 500, по существу одновременно или последовательно.
В различных вариантах реализации настоящего изобретения беспилотные летательные аппараты 200, дисплеи 230 которых формируют составной дисплей 300, могут быть выполнены с возможностью автоматического перемещения группами или друг за другом по меньшей мере на одну из парковочных станций, входящих в состав системы 500.
Согласно одному из вариантов реализации настоящего изобретения, заряженные беспилотные летательные аппараты 200 могут быть выполнены с возможностью автоматического возврата в свои первоначальные пространственные местоположения для повторного формирования того же самого составного дисплея 300.
Согласно другому варианту реализации настоящего изобретения, каждый из беспилотных летательных аппаратов 200 может быть снабжен по меньшей мере двумя дисплеями 230, размещенными на указанном беспилотном летательном аппарате 200 таким образом, что они расположены под углом по отношению друг к другу, при этом при формировании составного дисплея 300 указанные дисплеи 230 могут образовывать разные стороны составного дисплея 300.
Согласно иному варианту реализации настоящего изобретения, управляющее устройство системы 500 может обеспечивать возможность отображения одного и того же изображения 400 со всех сторон указанного составного дисплея 300, отображения изображения 400 по меньшей мере с одной из сторон указанного составного дисплея 300 или отображения разных изображений на разных сторонах указанного составного дисплея 300.
Согласно еще одному варианту реализации настоящего изобретения, управляющее устройство системы 500 может быть дополнительно выполнено с возможностью выдачи навигационных команд на беспилотные летательные аппараты 200, дисплеи 230 которых формируют составной дисплей 300, с обеспечением возможности перестроения этих беспилотных летательных аппаратов 200 для разделения указанного составного дисплея 300 по меньшей мере на две отдельных дисплейных части для визуализации изображения.
Согласно некоторому варианту реализации настоящего изобретения, управляющее устройство системы 500 может дополнительно обеспечивать возможность размещения беспилотных летательных аппаратов 200, направленных в заданную область пространства в ответ на навигационные команды управляющего устройства системы 500, в заданных пространственных местоположениях в соответствии с заданной моделью построения беспилотных летательных аппаратов с обеспечением возможности формирования в воздухе по меньшей мере двух составных дисплеев, каждый из которых может соответствовать вышеописанному составному дисплею 300. В одной из разновидностей данного варианта реализации настоящего изобретения управляющее устройство системы 500 может быть дополнительно выполнено с возможностью выдачи навигационных команд на беспилотные летательные аппараты 200, дисплеи 230 которых формируют по меньшей мере два составных дисплея 300, с обеспечением возможности перестроения этих беспилотных летательных аппаратов 200 для объединения указанных составных дисплеев 300 по меньшей мере в одну единую дисплейную часть для визуализации изображения.
На фиг. 3 схематично показан один из иллюстративных вариантов реализации многослойного составного дисплея 300, формируемого при реализации системы 500 для визуализации изображения, показанной на фиг. 1, с использованием вышеописанных беспилотных летательных аппаратов 200, показанных на фиг. 2.
Беспилотные летательные аппараты 200, направленные в заданную область пространства, могут быть разделены на две группы, при этом дисплеи 230 беспилотных летательных аппаратов 200 из первой группы могут формировать первый слой 310 составного дисплея 300, а дисплеи 230 беспилотных летательных аппаратов 200 из второй группы могут формировать второй слой 320 составного дисплея. В частности, первый слой 310 составного дисплея 300 может быть выполнен в целом параллельно второму слою 320 составного дисплея 300 (см. фиг. 3).
Кроме того, управляющее устройство системы 500 может обеспечивать возможность отображения на дисплеях 230 из первого слоя 310 составного дисплея 300 изображения, отличного от изображения, отображаемого на дисплеях 230 из второго слоя 320 составного дисплея 300, или совпадающего с ним. В альтернативном варианте управляющее устройство системы 500 может обеспечивать возможность отображения основного изображения на дисплеях 230 из первого слоя 310 составного дисплея 300 и может обеспечивать возможность отображения на дисплеях 230 из второго слоя 320 составного дисплея 300 другого изображения, являющегося фоновым для указанного основного изображения.
В одном из вариантов реализации настоящего изобретения беспилотные летательные аппараты 200, направляемые в заданную область пространства для формирования составного дисплея 300, могут быть разделены на группы, в каждой из которых дисплеи 230 беспилотных летательных аппаратов 200 могут формировать один из слоев составного дисплея, при этом управляющее устройство системы 500 могут дополнительно обеспечивать возможность отображения на каждом из указанных сформированных слоев составного дисплея 300 одной из составных частей трехмерного изображения, одного и того же двумерного изображения или разных двумерных изображений.
Второй вариант реализации беспилотного летательного аппарата
На фиг. 4 схематично показан еще один иллюстративный вариант реализации (второй вариант реализации) беспилотного летательного аппарата, в виде которого может быть реализован каждый из вышеописанных беспилотных летательных аппаратов 200, используемых в составе системы 500 для визуализации изображения, показанной на фиг. 1.
Беспилотный летательный аппарат 200, показанный на фиг. 4, содержит фюзеляж 210 и два движителя 220, установленных или закрепленных на фюзеляже 210, и снабжен двумя управляемыми источниками 240 света, каждый из которых выполнен с возможностью излучения света с изменяемой длиной волны и соединен с возможностью обмена данными с модулем управления (не показан) беспилотного летательного аппарата 200, который в свою очередь выполнен с возможностью установления соединения с обеспечением возможности обмена данными с вышеописанным управляющим устройством (не показано), входящим в состав системы 500, при этом указанный модуль управления дополнительно выполнен с возможностью управления работой источников 240 света, в том числе в ответ на данные или управляющие инструкции, принимаемые от управляющего устройства системы 500. Следует отметить, что в состав беспилотного летательного аппарата 200, показанного на фиг. 4, могут входить три и более управляемых источника 240 света (например, три, четыре, пять, шесть, семь, восемь, девять, десять и более управляемых источников 240 света), выполненных каждый с возможностью излучения света с изменяемой длиной волны. Следует также отметить, что источники 240 света могут быть установлены или закреплены как снаружи фюзеляжа 210 беспилотного летательного аппарата, так и внутри него, в том числе с использованием подходящих соединительных или крепежных средств, известных в уровне техники.
При использовании беспилотных летательных аппаратов 200, показанных на фиг. 4, в составе вышеописанной системы 500 для визуализации изображения управляющее устройство системы 500, соединенное с возможностью обмена данными с такими беспилотными летательными аппаратами 200, по сути аналогичным образом обеспечивает возможность направления по меньшей мере части из указанных беспилотных летательных аппаратов 200 из парковочных станций 100 в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов 200 в заданном пространственном местоположении в соответствии с заданной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного дисплея из указанных источников света, при этом каждый из источников света, формирующий указанный по меньшей мере один дисплей, соответствует по меньшей мере одному пикселу указанного дисплея. Кроме того, управляющее устройство системы 500 дополнительно выполнено с возможностью выдачи данных об изображении на беспилотные летательные аппараты 200 по фиг. 4 с обеспечением возможности изменения длины волны излучения источников света указанных беспилотных летательных аппаратов 200 для отображения указанного изображения на указанном дисплее. Таким образом, в заданной пространственной области в воздухе может быть параллельно или последовательно сформировано два и более дисплеев с использованием управляемых источников 240 света, входящих в состав беспилотных летательных аппаратов 200, направленных управляющим устройством системы 500 из соответствующих парковочных станций 100 в указанную пространственную область.
Кроме того, аналогично вышеописанным беспилотным летательным аппаратам 200, показанным на фиг. 2, беспилотные летательные аппараты 200 по фиг. 4, источники света которых формируют дисплей, образуют одну или более подвижных цепочек беспилотных летательных аппаратов, каждая из которых аналогичным образом имеет свое начало, соответствующее точке входа в совокупность беспилотных летательных аппаратов, образующих дисплей, и свой конец, соответствующий точке выхода из совокупности беспилотных летательных аппаратов, образующих дисплей. Для специалиста в данной области техники должно быть очевидно, что некоторые варианты реализации настоящего изобретения, описанные выше со ссылкой на фиг. 1, фиг. 2 и фиг. 3, применимы и к беспилотным летательным аппаратам 200, показанным на фиг. 4, и к системе 500 для визуализации изображения, в основе которой лежит использование этих беспилотных летательных аппаратов 200 по фиг. 4. Следует отметить, что управляющее устройство системы 500 может быть дополнительно выполнено с возможностью изменения длины волны, с которой излучают свет источники 240 света, формирующие дисплей, в реальном времени с обеспечением возможности отображения заданного статического или динамического изображения на указанном дисплее. Кроме того, каждый из источников 240 света, формирующих дисплей в каждом из беспилотных летательных аппаратов 200, может быть выполнен с возможностью излучения света белого цвета, света красного цвета, света зеленого цвета или света голубого цвета.
В одном из вариантов реализации настоящего изобретения каждый управляемый источник 240 света в каждом из беспилотных летательных аппаратов 200 по фиг. 4 может представлять собой многоцветный светодиодный модуль, выполненный с возможностью излучения света белого цвета, света красного цвета, света зеленого цвета или света голубого цвета или света, представляющего собой комбинацию двух или более из указанных цветов, или группу из четырех источников света, выполненных каждый с возможностью излучения света белого цвета, света красного цвета, света зеленого цвета или света голубого цвета или света, представляющего собой комбинацию двух или более из указанных цветов.
В другом варианте реализации настоящего изобретения управляемые источники 240 света могут быть размещены в каждом беспилотном летательном аппарате 200, показанном на фиг. 4, таким образом, что они излучают свет в противоположных направлениях, разных направлениях или в одном и том же направлении.
Еще в одном варианте реализации настоящего изобретения управляемые источники 240 света могут быть размещены в каждом беспилотном летательном аппарате 200, показанном на фиг. 4, таким образом, что они излучают свет в попарно противоположных направлениях, разных направлениях или в одном и том же направлении.
В ином варианте реализации настоящего изобретения управляемые источники 240 света могут быть размещены в каждом беспилотном летательном аппарате 200, показанном на фиг. 4, таким образом, что они излучают свет под заданными углами или каждый из них излучает свет в одном из следующих направлений: по направлению вверх, по направлению вниз, по направлению влево и по направлению вправо.
В некотором варианте реализации настоящего изобретения управляемые источники 240 света в каждом из беспилотных летательных аппаратов 200 по фиг. 4 могут быть выполнены с возможностью подсвечивания или освещения фюзеляжа 210. В одной из разновидностей данного варианта реализации фюзеляж 210 беспилотного летательного аппарата 200, подсвечиваемый или освещаемый источниками 240 света, может иметь форму шара или представляет собой шарообразный каркас. В другой разновидности данного варианта реализации фюзеляж 210 беспилотного летательного аппарата 200, подсвечиваемый или освещаемый источниками 240 света, может иметь форму сфероида или может представлять собой каркас в виде сфероида, при этом в качестве дополнения указанный каркас может быть снабжен оболочкой и в указанном каркасе может быть установлен по меньшей мере один воздушный движитель (в частности, вместо движителей 220, вместо одного из движителей 220 или в дополнение к движителям 220).
В некотором ином варианте реализации настоящего изобретения по меньшей мере одна из парковочных станций 100 может быть снабжена по меньшей мере одним хранилищем (не показано), выполненным с возможностью размещения в нем беспилотных летательных аппаратов 200 по фиг. 4 с образованием стопы. В одной из разновидностей данного варианта хранилище (не показано) может быть снабжено беспроводным зарядным устройством (не показано), выполненным с возможностью заряда беспилотных летательных аппаратов 200, размещенных в хранилище. В другой разновидности данного варианта реализации хранилище (не показано) может быть снабжено зарядным устройством (не показано), а беспилотные летательные аппараты 200 по фиг. 4 могут быть дополнительно выполнены с возможностью последовательного или параллельного электрического соединения друг с другом при размещении в хранилище с обеспечением возможности их подключения к указанному зарядному устройству для одновременного восполнения их запаса хода. Еще в одной разновидности данного варианта реализации хранилище (не показано) может быть снабжено зарядными устройствами (не показаны), а каждый из беспилотных летательных аппаратов 200 по фиг. 4 может быть выполнен с возможностью подключения к одному из зарядных устройств при размещении в хранилище с обеспечением возможности каждый из беспилотных летательных аппаратов 200 по фиг. 4 может быть дополнительно снабжен гироскопом (не показан), выполненным с возможностью определения пространственного положения беспилотного летательного аппарата 200, и может быть выполнен с возможностью изменения своего пространственного положения в хранилище (не показано) в зависимости от показаний гироскопа.
Для специалиста в данной области техники должно быть очевидно, что некоторые варианты реализации настоящего изобретения, описанные выше со ссылкой на фиг. 1 и фиг. 4, применимы и к беспилотным летательным аппаратам 200, показанным на фиг. 2, и к системе 500 для визуализации изображения, которая показана на фиг. 1 и в основе которой лежит использование этих беспилотных летательных аппаратов 200 по фиг. 2.
Третий вариант реализации беспилотного летательного аппарата
На фиг. 5 схематично показан еще один иллюстративный вариант реализации (третий вариант реализации) беспилотного летательного аппарата, в виде которого может быть реализован каждый из вышеописанных беспилотных летательных аппаратов 200, используемых в составе системы 500 для визуализации изображения, показанной на фиг. 1.
Беспилотный летательный аппарат 200, показанный на фиг. 5, содержит фюзеляж 210 и два движителя 220, установленных или закрепленных на фюзеляже 210, и снабжен экраном 250, выполненным с возможностью проецирования на него изображения. Следует отметить, что в состав беспилотного летательного аппарата 200, показанного на фиг. 5, могут входить один и более экранов 250, в частности могут входить два, три, четыре, пять, шесть, семь, восемь, девять, десять и более экранов 250, выполненных каждый с возможностью проецирования на них изображения. Следует также отметить, что экран 250 может быть установлен или закреплен как снаружи фюзеляжа 210 беспилотного летательного аппарата по фиг. 5, так и внутри него, в том числе с использованием подходящих соединительных или крепежных средств, известных в уровне техники.
При использовании беспилотных летательных аппаратов 200, показанных на фиг. 5, в составе вышеописанной системы 500 для визуализации изображения управляющее устройство системы 500, соединенное с возможностью обмена данными с такими беспилотными летательными аппаратами 200, по сути аналогичным образом обеспечивает возможность направления по меньшей мере части из указанных беспилотных летательных аппаратов 200 из парковочных станций 100 в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов 200 в заданном пространственном местоположении в соответствии с заданной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного составного экрана из указанных отдельных экранов. Таким образом, в заданной пространственной области в воздухе может быть параллельно или последовательно сформировано два и более составных экранов с использованием экранов 250, входящих в состав беспилотных летательных аппаратов 200, направленных управляющим устройством системы 500 из соответствующих парковочных станций 100 в указанную пространственную область.
Кроме того, система 500 для визуализации изображения, в основе которой лежит использование беспилотных летательных аппаратов 200 по фиг. 5, дополнительно содержит проекционное устройство (не показано) для проецирования изображения, которое соединено с возможностью обмена данными с управляющим устройством системы 500, которое выполнено с возможностью управления работой проекционного устройства (не показано) и возможностью обмена данными с этим проекционным устройством (не показано).
Кроме того, управляющее устройство системы 500, в основе которой лежит использование беспилотных летательных аппаратов 200 по фиг. 5, дополнительно выполнено с возможностью выдачи данных об изображении на проекционное устройство (не показано) с обеспечением возможности проецирования указанного изображения на вышеописанном составном экране. Кроме того, аналогично вышеописанным беспилотным летательным аппаратам 200, показанным на фиг. 2, беспилотные летательные аппараты 200 по фиг. 5, экраны которых формируют составной экран, образуют одну или более подвижных цепочек беспилотных летательных аппаратов, каждая из которых аналогичным образом имеет свое начало, соответствующее точке входа в совокупность беспилотных летательных аппаратов, образующих составной экран, и свой конец, соответствующий точке выхода из совокупности беспилотных летательных аппаратов, образующих составной экран. Для специалиста в данной области техники должно быть очевидно, что некоторые варианты реализации настоящего изобретения, описанные выше со ссылкой на фиг. 1, фиг. 2, фиг. 3 и фиг. 4, применимы и к беспилотным летательным аппаратам 200, показанным на фиг. 5, и к системе 500 для визуализации изображения, в основе которой лежит использование этих беспилотных летательных аппаратов 200 по фиг. 5.
Четвертый вариант реализации беспилотного летательного аппарата
На фиг. 6 схематично показан еще один иллюстративный вариант реализации (четвертый вариант реализации) беспилотного летательного аппарата, в виде которого может быть реализован каждый из вышеописанных беспилотных летательных аппаратов 200, используемых в составе системы 500 для визуализации изображения, показанной на фиг. 1.
Беспилотный летательный аппарат 200, показанный на фиг. 6, содержит фюзеляж 210, выполненный в виде корпуса или каркаса, который выполняет функцию поверхности для проецирования на ней изображения, и два движителя 220, установленных или закрепленных на фюзеляже 210 или в нем. В частности, фюзеляж 210 в каждом из беспилотных летательных аппаратов 200 по фиг. 6, может быть выполнены из известного в уровне техники материала, подходящего для проецирования на нем изображения.
При использовании беспилотных летательных аппаратов 200, показанных на фиг. 6, в составе вышеописанной системы 500 для визуализации изображения управляющее устройство системы 500, соединенное с возможностью обмена данными с такими беспилотными летательными аппаратами 200, по сути аналогичным образом обеспечивает возможность направления по меньшей мере части из указанных беспилотных летательных аппаратов 200 из парковочных станций 100 в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов 200 в заданном пространственном местоположении в соответствии с заданной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного экрана из указанных отдельных фюзеляжей 210. Таким образом, в заданной пространственной области в воздухе может быть параллельно или последовательно сформировано два и более экранов с использованием фюзеляжей 210, входящих в состав беспилотных летательных аппаратов 200, направленных управляющим устройством системы 500 из соответствующих парковочных станций 100 в указанную пространственную область.
Кроме того, система 500 для визуализации изображения, в основе которой лежит использование беспилотных летательных аппаратов 200 по фиг. 6, дополнительно содержит проекционное устройство (не показано) для проецирования изображения, которое соединено с возможностью обмена данными с модулем управления (не показан) беспилотного летательного аппарата 200 по фиг. 6, который в свою очередь выполнен с возможностью установления соединения с обеспечением возможности обмена данными с вышеописанным управляющим устройством (не показано), входящим в состав системы 500, при этом указанный модуль управления дополнительно выполнен с возможностью управления работой проекционного устройства (не показано), в том числе в ответ на данные или управляющие инструкции, принимаемые от управляющего устройства системы 500.
Кроме того, управляющее устройство системы 500, в основе которой лежит использование беспилотных летательных аппаратов 200 по фиг. 6, дополнительно выполнено с возможностью выдачи данных об изображении на проекционное устройство (не показано) с обеспечением возможности проецирования указанного изображения на вышеописанном составном экране. Кроме того, аналогично вышеописанным беспилотным летательным аппаратам 200, показанным на фиг. 2, беспилотные летательные аппараты 200 по фиг. 6, фюзеляжи 210 которых формируют экран, образуют одну или более подвижных цепочек беспилотных летательных аппаратов, каждая из которых аналогичным образом имеет свое начало, соответствующее точке входа в совокупность беспилотных летательных аппаратов, образующих экран из своих фюзеляжей 210, и свой конец, соответствующий точке выхода из совокупности беспилотных летательных аппаратов, образующих экран из своих фюзеляжей 210. Для специалиста в данной области техники должно быть очевидно, что некоторые варианты реализации настоящего изобретения, описанные выше со ссылкой на фиг. 1, фиг. 2, фиг. 3 и фиг. 4, применимы и к беспилотным летательным аппаратам 200, показанным на фиг. 6, и к системе 500 для визуализации изображения, в основе которой лежит использование этих беспилотных летательных аппаратов 200 по фиг. 6.
Пятый вариант реализации беспилотного летательного аппарата
На фиг. 7 схематично показан еще один иллюстративный вариант реализации (пятый вариант реализации) беспилотного летательного аппарата, в виде которого может быть реализован каждый из вышеописанных беспилотных летательных аппаратов 200, используемых в составе системы 500 для визуализации изображения, показанной на фиг. 1.
Беспилотный летательный аппарат 200, показанный на фиг. 7, содержит фюзеляж 210 и два движителя 220, установленных или закрепленных на фюзеляже 210, и снабжен управляемым источником 240 света, который выполнен с возможностью излучения света с изменяемой длиной волны, и источником 260 белого света, выполненным с возможностью излучения света белого цвета, при этом управляемый источник 240 света и источник 260 белого света соединены с возможностью обмена данными с модулем управления (не показан) беспилотного летательного аппарата 200, который в свою очередь выполнен с возможностью установления соединения с обеспечением возможности обмена данными с вышеописанным управляющим устройством (не показано), входящим в состав системы 500, при этом указанный модуль управления дополнительно выполнен с возможностью управления работой управляемого источника 240 света и источника 260 белого света, в том числе в ответ на данные или управляющие инструкции, принимаемые от управляющего устройства системы 500. Следует отметить, что в состав беспилотного летательного аппарата 200, показанного на фиг. 7, могут входить один и более управляемых источников 240 света (например, два, три, четыре, пять, шесть, семь, восемь, девять, десять и более управляемых источников 240 света), выполненных каждый с возможностью излучения света с изменяемой длиной волны, и один и более источников 260 белого света (например, два, три, четыре, пять, шесть, семь, восемь, девять, десять и более источников 260 белого света), выполненных каждый с возможностью излучения света белого цвета. Следует также отметить, что управляемые источники 240 света и источники 260 белого света могут быть установлены или закреплены как снаружи фюзеляжа 210 беспилотного летательного аппарата, так и внутри него, в том числе с использованием подходящих соединительных или крепежных средств, известных в уровне техники.
При использовании беспилотных летательных аппаратов 200, показанных на фиг. 7, в составе вышеописанной системы 500 для визуализации изображения управляющее устройство системы 500, соединенное с возможностью обмена данными с такими беспилотными летательными аппаратами 200, по сути аналогичным образом обеспечивает возможность направления по меньшей мере части из указанных беспилотных летательных аппаратов 200 из парковочных станций 100 в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов 200 в заданном пространственном местоположении в соответствии с заданной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного дисплея из указанных источников света (то есть из сочетания или комбинации управляемых источников 240 света и источников 260 белого света), при этом каждый из указанных источников света, формирующих указанный по меньшей мере один дисплей, соответствует по меньшей мере одному пикселу указанного дисплея. Таким образом, в заданной пространственной области в воздухе может быть параллельно или последовательно сформировано два и более дисплеев с использованием управляемых источников 240 света и источников 260 белого света, входящих в состав беспилотных летательных аппаратов 200, направленных управляющим устройством системы 500 из соответствующих парковочных станций 100 в указанную пространственную область.
Кроме того, управляющее устройство системы 500 дополнительно выполнено с возможностью выдачи данных об изображении на беспилотные летательные аппараты 200 по фиг. 7 с обеспечением возможности излучения света белого цвета источниками 260 белого света и с обеспечением возможности изменения длины волны излучения управляемых источников 240 света указанных беспилотных летательных аппаратов 200 для отображения указанного изображения на дисплее, образованном из сочетания или комбинации управляемых источников 240 света и источников 260 белого света. Кроме того, аналогично вышеописанным беспилотным летательным аппаратам 200, показанным на фиг. 2, беспилотные летательные аппараты 200 по фиг. 7, источники света которых формируют дисплей, образуют одну или более подвижных цепочек беспилотных летательных аппаратов, каждая из которых аналогичным образом имеет свое начало, соответствующее точке входа в совокупность беспилотных летательных аппаратов, образующих дисплей, и свой конец, соответствующий точке выхода из совокупности беспилотных летательных аппаратов, образующих дисплей. Следует отметить, что управляющее устройство системы 500 может быть дополнительно выполнено с возможностью изменения длины волны, с которой излучают свет источники 240 света, формирующие дисплей, в реальном времени с обеспечением возможности отображения заданного статического или динамического изображения на указанном дисплее. Кроме того, каждый из управляемых источников 240 света, формирующих дисплей в каждом из беспилотных летательных аппаратов 200, может быть выполнен с возможностью излучения света белого цвета, света красного цвета, света зеленого цвета или света голубого цвета. Для специалиста в данной области техники должно быть очевидно, что некоторые варианты реализации настоящего изобретения, описанные выше со ссылкой на фиг. 1, фиг. 2 и фиг. 3, применимы и к беспилотным летательным аппаратам 200, показанным на фиг. 7, и к системе 500 для визуализации изображения, в основе которой лежит использование этих беспилотных летательных аппаратов 200 по фиг. 7.
Шестой вариант реализации беспилотного летательного аппарата
На фиг. 8 схематично показан еще один иллюстративный вариант реализации (шестой вариант реализации) беспилотного летательного аппарата, в виде которого может быть реализован каждый из вышеописанных беспилотных летательных аппаратов 200, используемых в составе системы 500 для визуализации изображения, показанной на фиг. 1.
Беспилотный летательный аппарат 200, показанный на фиг. 8, содержит фюзеляж 210 и два движителя 220, установленных или закрепленных на фюзеляже 210, и снабжен экраном 250, выполненным с возможностью проецирования на него изображения, и проектором или проекционным устройством 270, установленным или размещенным в фюзеляже 210 или на нем с возможностью проецирования изображения на экран 250. Следует отметить, что в состав беспилотного летательного аппарата 200, показанного на фиг. 8, могут входить один и более экранов 250, в частности могут входить два, три, четыре, пять, шесть, семь, восемь, девять, десять и более экранов 250, выполненных каждый с возможностью проецирования на них изображения, при этом для проецирования изображения на указанные экраны 250 может быть использовано одно и то же проекционное устройство 270 или два и более проекционных устройств 270. Следует также отметить, что в состав беспилотного летательного аппарата 200, показанного на фиг. 8, могут входить один и более проекционных устройств 270, в частности могут входить один, два, три, четыре, пять, шесть, семь, восемь, девять, десять и более проекционных устройств 270, выполненных каждый с возможностью проецирования изображения по меньшей мере на один из экранов 250, по меньшей мере на два экрана 250 или несколько экранов 250. Кроме того, экран 250 может быть установлен или закреплен как снаружи фюзеляжа 210 беспилотного летательного аппарата по фиг. 8, так и внутри него, в том числе с использованием подходящих соединительных или крепежных средств, известных в уровне техники.
При использовании беспилотных летательных аппаратов 200, показанных на фиг. 8, в составе вышеописанной системы 500 для визуализации изображения управляющее устройство системы 500, соединенное с возможностью обмена данными с такими беспилотными летательными аппаратами 200, по сути аналогичным образом обеспечивает возможность направления по меньшей мере части из указанных беспилотных летательных аппаратов 200 из парковочных станций 100 в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов 200 в заданном пространственном местоположении в соответствии с заданной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного составного экрана из указанных отдельных экранов. Таким образом, в заданной пространственной области в воздухе может быть параллельно или последовательно сформировано два и более составных экранов с использованием экранов 250, входящих в состав беспилотных летательных аппаратов 200, направленных управляющим устройством системы 500 из соответствующих парковочных станций 100 в указанную пространственную область.
Кроме того, проекционное устройство 270 в каждом из беспилотных летательных аппаратов 200, показанных на фиг. 8, соединено с возможностью обмена данными с модулем управления (не показан) этого беспилотного летательного аппарата 200 по фиг. 8, который в свою очередь выполнен с возможностью установления соединения с обеспечением возможности обмена данными с вышеописанным управляющим устройством (не показано), входящим в состав системы 500, при этом указанный модуль управления дополнительно выполнен с возможностью управления работой проекционного устройства (не показано), в том числе в ответ на данные или управляющие инструкции, принимаемые от управляющего устройства системы 500.
Кроме того, управляющее устройство системы 500, в основе которой лежит использование беспилотных летательных аппаратов 200 по фиг. 8, дополнительно выполнено с возможностью выдачи данных об изображении на проекционное устройство 270 каждого из беспилотных летательных аппаратов 200 с обеспечением возможности проецирования указанного изображения на вышеописанном составном экране. Кроме того, аналогично вышеописанным беспилотным летательным аппаратам 200, показанным на фиг. 2, беспилотные летательные аппараты 200 по фиг. 8, экраны которых формируют составной экран, образуют одну или более подвижных цепочек беспилотных летательных аппаратов, каждая из которых аналогичным образом имеет свое начало, соответствующее точке входа в совокупность беспилотных летательных аппаратов, образующих составной экран, и свой конец, соответствующий точке выхода из совокупности беспилотных летательных аппаратов, образующих составной экран. Для специалиста в данной области техники должно быть очевидно, что некоторые варианты реализации настоящего изобретения, описанные выше со ссылкой на фиг. 1, фиг. 2, фиг. 3 и фиг. 4, применимы и к беспилотным летательным аппаратам 200, показанным на фиг. 8, и к системе 500 для визуализации изображения, в основе которой лежит использование этих беспилотных летательных аппаратов 200 по фиг. 8.
Седьмой вариант реализации беспилотного летательного аппарата
На фиг. 9 схематично показан еще один иллюстративный вариант реализации (седьмой вариант реализации) беспилотного летательного аппарата, в виде которого может быть реализован каждый из вышеописанных беспилотных летательных аппаратов 200, используемых в составе системы 500 для визуализации изображения, показанной на фиг. 1.
Беспилотный летательный аппарат 200, показанный на фиг. 9, содержит фюзеляж 210, выполненный в виде корпуса или каркаса, который выполняет функцию поверхности для проецирования на ней изображения, и два движителя 220, установленных или закрепленных на фюзеляже 210 или в нем. В частности, фюзеляж 210 в каждом из беспилотных летательных аппаратов 200 по фиг. 9, может быть выполнены из известного в уровне техники материала, подходящего для проецирования на нем изображения. Кроме того, в состав беспилотного летательного аппарата 200, показанного на фиг. 9, входит проектор или проекционное устройство 270, установленное или размещенное в фюзеляже 210 или на нем с возможностью проецирования изображения на фюзеляж 210 этого беспилотного летательного аппарата 200. Следует отметить, что в состав беспилотного летательного аппарата 200, показанного на фиг. 9, могут входить один и более проекционных устройств 270, в частности могут входить один, два, три, четыре, пять, шесть, семь, восемь, девять, десять и более проекционных устройств 270, выполненных каждый с возможностью проецирования изображения по меньшей мере на одну область фюзеляжа 210, по меньшей мере на две области фюзеляжа или несколько разных областей фюзеляжа 210.
При использовании беспилотных летательных аппаратов 200, показанных на фиг. 9, в составе вышеописанной системы 500 для визуализации изображения управляющее устройство системы 500, соединенное с возможностью обмена данными с такими беспилотными летательными аппаратами 200, по сути аналогичным образом обеспечивает возможность направления по меньшей мере части из указанных беспилотных летательных аппаратов 200 из парковочных станций 100 в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов 200 в заданном пространственном местоположении в соответствии с заданной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного экрана из фюзеляжей 210 указанных направленных беспилотных летательных аппаратов 200. Таким образом, в заданной пространственной области в воздухе может быть параллельно или последовательно сформировано два и более экранов с использованием фюзеляжей 210, входящих в состав беспилотных летательных аппаратов 200, направленных управляющим устройством системы 500 из соответствующих парковочных станций 100 в указанную пространственную область.
Кроме того, проекционное устройство 270 в каждом из беспилотных летательных аппаратов 200, показанных на фиг. 9, соединено с возможностью обмена данными с модулем управления (не показан) этого беспилотного летательного аппарата 200 по фиг. 8, который в свою очередь выполнен с возможностью установления соединения с обеспечением возможности обмена данными с вышеописанным управляющим устройством (не показано), входящим в состав системы 500, при этом указанный модуль управления дополнительно выполнен с возможностью управления работой проекционного устройства (не показано), в том числе в ответ на данные или управляющие инструкции, принимаемые от управляющего устройства системы 500.
Кроме того, управляющее устройство системы 500, в основе которой лежит использование беспилотных летательных аппаратов 200 по фиг. 9, дополнительно выполнено с возможностью выдачи данных об изображении на проекционное устройство 270 каждого из беспилотных летательных аппаратов 200 с обеспечением возможности проецирования указанного изображения на вышеописанном экране. Кроме того, аналогично вышеописанным беспилотным летательным аппаратам 200, показанным на фиг. 2, беспилотные летательные аппараты 200 по фиг. 9, фюзеляжи 210 которых формируют экран, образуют одну или более подвижных цепочек беспилотных летательных аппаратов, каждая из которых аналогичным образом имеет свое начало, соответствующее точке входа в совокупность беспилотных летательных аппаратов, образующих экран из своих фюзеляжей 210, и свой конец, соответствующий точке выхода из совокупности беспилотных летательных аппаратов, образующих экран из своих фюзеляжей 210. Для специалиста в данной области техники должно быть очевидно, что некоторые варианты реализации настоящего изобретения, описанные выше со ссылкой на фиг. 1, фиг. 2, фиг. 3 и фиг. 4, применимы и к беспилотным летательным аппаратам 200, показанным на фиг. 9, и к системе 500 для визуализации изображения, в основе которой лежит использование этих беспилотных летательных аппаратов 200 по фиг. 9.
Восьмой вариант реализации беспилотного летательного аппарата
На фиг. 10 схематично показан еще один иллюстративный вариант реализации (восьмой вариант реализации) беспилотного летательного аппарата, в виде которого может быть реализован каждый из вышеописанных беспилотных летательных аппаратов 200, используемых в составе системы 500 для визуализации изображения, показанной на фиг. 1.
Беспилотный летательный аппарат 200, показанный на фиг. 10, содержит внутренний корпус 215, который может быть выполнен в виде каркаса, рамы, остова или иной несущей конструкции, и два движителя 220, установленных или закрепленных на внутреннем корпусе 215 или в нем. В частности, внутренний корпус 215 в каждом из беспилотных летательных аппаратов 200 по фиг. 10, может быть выполнен из любого подходящего материала, известного в уровне техники, например из алюминия. Кроме того, беспилотный летательный аппарат 200, показанный на фиг. 10, может быть снабжен одним и более движителями 220, обеспечивающими возможность перемещения по воздуху или полета указанного беспилотного летательного аппарата 200, например одним, двумя, тремя, четырьмя, пятью, шестью, семью, восемью, девятью, десятью и большим количеством движителей 220, при этом количество движителей 220 может зависеть, например, от массы, формы и/или размера каждого конкретного беспилотного летательного аппарата 200 по фиг. 10 в отдельности.
Кроме того, беспилотный летательный аппарат 200, показанный на фиг. 10, содержит внешний корпус 280, в который по меньшей мере заключены вышеописанные внутренний корпус 215 и движители 220. Таким образом, как показано на фиг. 10, внешний корпус 280 по сути охватывает или окружает внутренний корпус 215 с движителями 220, так что внутренний корпус 215 и движители 220 находятся во внутреннем пространстве внешнего корпуса 280. Следует отметить, что внешний корпус 280 в беспилотном летательном аппарате 200 по фиг. 10 может по меньшей мере частично окружать внутренний корпус 215 с движителями 220 (т.е. может быть выполнен несплошным) или может полностью окружать внутренний корпус 215 с движителями 220 (т.е. может быть выполнен сплошным). Следует также отметить, что внешний корпус 280 в беспилотном летательном аппарате 200 по фиг. 10 может быть выполнен, например, в виде каркаса, каркаса, рамы, остова или любой иной подходящей конструкции, известной в уровне техники и используемой в качестве внешнего корпуса для беспилотных летательных аппаратов, подобных беспилотным летательным аппаратам 200, описанным в данном документе.
Кроме того, беспилотный летательный аппарат 200, показанный на фиг. 10, содержит два управляемых источника 240 света, каждый из которых выполнен с возможностью излучения света с изменяемой длиной волны с обеспечением возможности подсвечивания или освещения внешнего корпуса 280, в частности по меньшей мере одной части или одного участка этого внешнего корпуса 280. Таким образом, внешний корпус 280 в беспилотном летательном аппарате 200 по фиг. 10 по сути выполняет функцию поверхности для проецирования на ней изображения, в частности по меньшей мере части изображения 400. Следует отметить, что в состав беспилотного летательного аппарата 200, показанного на фиг. 4, могут входить три и более управляемых источника 240 света (например, три, четыре, пять, шесть, семь, восемь, девять, десять и более управляемых источников 240 света), выполненных каждый с возможностью излучения света с изменяемой длиной волны. Следует также отметить, что управляемые источники 240 света могут быть установлены или закреплены как снаружи внутреннего корпуса 215 беспилотного летательного аппарата, так и внутри него, в том числе с использованием подходящих соединительных или крепежных средств, известных в уровне техники. Кроме того, внешний корпус 280 в беспилотном летательном аппарате 200 по фиг. 10 может быть выполнен из любого известного в уровне техники материала, подходящего для проецирования на нем изображения.
Кроме того, в состав беспилотного летательного аппарата 200, показанного на фиг. 10, входит и модуль управления (не показан), который функционально соединен с управляемыми источниками 240 света с обеспечением возможности изменения длины волны излучения указанных источников 240 света для отображения по меньшей мере части статического или динамического изображения посредством указанных источников 240 света на поверхности внешнего корпуса 280. В одном из вариантов реализации настоящего изобретения на поверхность внешнего корпуса 280 каждого из беспилотных летательный аппаратов 200 может быть нанесено специальное покрытие, на которое управляемые источники 240 света этого беспилотного летательного аппарата 200 будут излучать или направлять пучки или лучи света с разной длиной волны с обеспечением проецирования заданного изображения на указанное покрытие. В другом варианте реализации настоящего изобретения к поверхности внешнего корпуса 280 каждого из беспилотных летательный аппаратов 200 может быть прикреплен или приделан с образованием единого целого специальный элемент или компонент (например, в виде пластины, полотна и т.п.) из любого известного в уровне техники подходящего материала, на который управляемые источники 240 света этого беспилотного летательного аппарата 200 будут излучать или направлять пучки или лучи света с разной длиной волны с обеспечением проецирования заданного изображения на указанное покрытие.
При использовании беспилотных летательных аппаратов 200, показанных на фиг. 10, в составе вышеописанной системы 500 для визуализации изображения управляющее устройство системы 500, соединенное с возможностью обмена данными с такими беспилотными летательными аппаратами 200, по сути аналогичным образом обеспечивает возможность направления по меньшей мере части из указанных беспилотных летательных аппаратов 200 из парковочных станций 100 в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов 200 в заданном пространственном местоположении в соответствии с заданной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного дисплея из внешних корпусов 280 указанных направленных беспилотных летательных аппаратов 200. Таким образом, в заданной пространственной области в воздухе может быть параллельно или последовательно сформировано два и более дисплеев с использованием внешних корпусов 280, входящих в состав беспилотных летательных аппаратов 200, направленных управляющим устройством системы 500 из соответствующих парковочных станций 100 в указанную пространственную область.
Кроме того, управляемые источники 240 света в каждом из беспилотных летательных аппаратов 200, показанных на фиг. 9, соединены каждый с возможностью обмена данными с модулем управления (не показан) этого беспилотного летательного аппарата 200 по фиг. 10, который в свою очередь выполнен с возможностью установления соединения с обеспечением возможности обмена данными с вышеописанным управляющим устройством (не показано), входящим в состав системы 500, при этом указанный модуль управления дополнительно выполнен с возможностью управления работой каждого из управляемых источников 240 света, в том числе в ответ на данные или управляющие инструкции, принимаемые от управляющего устройства системы 500.
Кроме того, аналогично вышеописанным беспилотным летательным аппаратам 200, показанным на фиг. 2, беспилотные летательные аппараты 200 по фиг. 10, внешние корпуса 280 которых формируют дисплей, образуют одну или более подвижных цепочек беспилотных летательных аппаратов, каждая из которых аналогичным образом имеет свое начало, соответствующее точке входа в совокупность беспилотных летательных аппаратов, образующих дисплей из своих внешних корпусов 280, и свой конец, соответствующий точке выхода из совокупности беспилотных летательных аппаратов, образующих дисплей из своих внешних корпусов 280.
В одном из вариантов реализации настоящего изобретения внешний корпус 280 в каждом из беспилотных летательных аппаратов 200 по фиг. 10, может иметь форму сферы, может представлять собой шарообразный каркас, который в качестве дополнения может быть снабжен оболочкой, выполненной с возможностью проецирования на нее изображения с помощью управляемых источников 240 света, зрительно видимого с внешней стороны указанной оболочки. В одной из разновидностей данного варианта реализации оболочка шарообразного каркаса, в виде которого может быть выполнен внешний корпус 280 в каждом беспилотном летательном аппарате 200 по фиг. 10, входящем в состав системы 500, может быть соединена с указанным каркасом с возможностью вращения по отношению к нему и с возможностью подсвечивания или освещения указанной оболочки управляемыми источниками 240 света указанного беспилотного летательного аппарата 200.
Для специалиста в данной области техники должно быть очевидно, что некоторые варианты реализации настоящего изобретения, описанные выше со ссылкой на фиг. 1, фиг. 2, фиг. 3 и фиг. 4, применимы и к беспилотным летательным аппаратам 200, показанным на фиг. 10, и к системе 500 для визуализации изображения, в основе которой лежит использование этих беспилотных летательных аппаратов 200 по фиг. 10.
На фиг. 11 схематично показан один из иллюстративных вариантов реализации многослойного составного дисплея 300, формируемого при реализации системы 500 для визуализации изображения, показанной на фиг. 1, с использованием вышеописанных беспилотных летательных аппаратов 200, показанных на фиг. 10.
Беспилотные летательные аппараты 200 по фиг. 10, направленные в заданную область пространства, могут быть разделены на две группы, при этом дисплеи 230 беспилотных летательных аппаратов 200 по фиг. 10 из первой группы могут формировать первый слой 310 составного дисплея 300, а дисплеи 230 беспилотных летательных аппаратов 200 по фиг. 10 из второй группы могут формировать второй слой 320 составного дисплея. В частности, первый слой 310 составного дисплея 300 может быть выполнен в целом параллельно второму слою 320 составного дисплея 300 (см. фиг. 11).
Кроме того, управляющее устройство системы 500 может обеспечивать возможность отображения на дисплеях 230 из первого слоя 310 составного дисплея 300 изображения, отличного от изображения, отображаемого на дисплеях 230 из второго слоя 320 составного дисплея 300, или совпадающего с ним. В альтернативном варианте управляющее устройство системы 500 может обеспечивать возможность отображения основного изображения на дисплеях 230 из первого слоя 310 составного дисплея 300 и может обеспечивать возможность отображения на дисплеях 230 из второго слоя 320 составного дисплея 300 другого изображения, являющегося фоновым для указанного основного изображения.
Функционирование системы для визуализации изображения
На фиг. 1 для наглядности также показаны шесть ключевых положений (A, B, C, D, E, F), которые может принимать каждый беспилотный летательный аппарат 200 в системе 500 для визуализации изображения в процессе его перемещения по воздуху или полета от начального пункта полета до конечного пункта полета в рамках одного цикла полета такого беспилотного летательного аппарата 200.
В положении (A) на фиг. 1 каждый из беспилотных летательных аппаратов 200, входящих в состав системы 500, размещен с целью парковки или восполнения запаса хода в соответствующей одной из парковочных станций 100, входящих в состав системы 500 и ожидает получения навигационных и/или управляющих команд от управляющего устройства, входящего в состав системы 500. Положение (А) по сути соответствует начальном пункту перемещения по воздуху или полета указанного беспилотного летательного аппарата 200 и соответствует началу цикла перемещения по воздуху или полета такого беспилотного летательного аппарата 200.
В положении (B) на фиг. 1, которое каждый из беспилотных летательных аппаратов 200, входящих в состав системы 500, может занять после нахождения в положении (A) в ответ на навигационные команды управляющего устройства системы 500, которые в свою очередь могут быть сформированы, например, в ответ на запрос пользовательского устройства, беспилотные летательные аппараты 200 с полным запасом хода (если используются впервые в рамках данного цикла) или восполненным запасом хода (если используются повторно в рамках данного цикла) в требуемом количестве, соответствующем заданной модели построения беспилотных летательных аппаратов и достаточном для формирования изображения 400, выпускают из соответствующих парковочных станций 100, при этом вылет беспилотных летательных аппаратов 200 из одной и той же парковочной станции 100 может происходить последовательно, а вылет беспилотных летательных аппаратов 200 из разных парковочных станций 100 может происходить по существу одновременно), что приводит к образованию в воздухе в области пространства, находящемся на некотором удалении от парковочных станций 100, группы из двух, трех и более бесплотных летательных аппаратов (см. слева на фиг. 1).
В положении (С) на фиг. 1, которое каждый из беспилотных летательных аппаратов 200, входящих в состав системы 500, может занять после нахождения в положении (B) в ответ на навигационные команды управляющего устройства системы 500, беспилотные летательные аппараты 200 из группы бесплотных летательных аппаратов, образованной в вышеописанном положении (B), последовательно или по очереди выстраиваются в цепочку подлетающих бесплотных летательных аппаратов, направленную или следующую в сторону точки входа в совокупность беспилотных летательных аппаратов, формирующих составной дисплей 300 в заданной области пространства.
В положении (D) на фиг. 1, которое каждый из беспилотных летательных аппаратов 200, входящих в состав системы 500, может занять после нахождения в положении (С) в ответ на навигационные команды управляющего устройства системы 500, каждый из беспилотных летательных аппаратов 200 из цепочки подлетающих бесплотных летательных аппаратов, формируемой в вышеописанном положении (C), входит через точку входа в совокупность беспилотных летательных аппаратов, формирующих составной дисплей 300 в заданной области пространства, с обеспечением сначала занятия пространственного местоположения, соответствующего началу самого первого ряда из совокупности рядов, формирующих матрицу беспилотных летательных аппаратов 200, используемых для формирования составного дисплея 300, и соответствующего началу подвижной цепочки беспилотных летательных аппаратов, в которой беспилотные летательные аппараты 200, формирующие составной дисплей 300, перемещаются друг за другом по заданной траектории в сторону конца самого последнего ряда из указанной совокупности рядов, формирующих матрицу беспилотных летательных аппаратов 200. Следует отметить, что модуль управления беспилотного летательного аппарата 200 или управляющее устройство системы 500 дополнительно выдает управляющие команды на дисплей 230 этого беспилотного летательного аппарата 200 для его включения в момент времени, когда указанный беспилотный летательный аппарат 200 занимает начальное положение в своей подвижной цепочке при входе через точку входа. В процессе перемещения в составе подвижной цепочки беспилотных летательных аппаратов в пределах контуров составного дисплея 300 каждый из беспилотных летательных аппаратов 200, формирующих составной дисплей 300, последовательно занимает новые пространственные местоположения в соответствии с заданной траекторией перемещения указанной подвижной цепочки с обеспечением перехода на следующий ряд при достижении конца предыдущего ряда до тех пор, пока указанный беспилотный летательный аппарат 200 не достигнет конца последнего ряда в матрице беспилотных летательных аппаратов 200, соответствующего точке выхода из совокупности беспилотных летательных аппаратов, формирующих составной дисплей 300 в заданной области пространства и соответствующего концу подвижной цепочки беспилотных летательных аппаратов, в которой беспилотные летательные аппараты 200 формируют составной дисплей 300.
В положении (E) на фиг. 1, которое каждый из беспилотных летательных аппаратов 200, входящих в состав системы 500, может занять после нахождения в положении (D) в ответ на навигационные команды управляющего устройства системы 500, беспилотные летательные аппараты 200, последовательно или по очереди выходящие через точку выхода из совокупности беспилотных летательных аппаратов, образующих составной дисплей 300, выстраиваются в цепочку бесплотных летательных аппаратов, направленную или следующую в сторону парковочных станций 100. Следует отметить, что модуль управления беспилотного летательного аппарата 200 или управляющее устройство системы 500 дополнительно выдает управляющие команды на дисплей 230 этого беспилотного летательного аппарата 200 для его включения или затемнения в момент времени, когда указанный беспилотный летательный аппарат 200 выходит из своей подвижной цепочки через точку выхода из совокупности беспилотных летательных аппаратов, формирующих составной дисплей 300.
В положении (F) на фиг. 1, которое каждый из беспилотных летательных аппаратов 200, входящих в состав системы 500, может занять после нахождения в положении (E) в ответ на навигационные команды управляющего устройства системы 500, беспилотные летательные аппараты 200 из цепочки возвращающихся беспилотных летательных аппаратов, образованной из беспилотных летательных аппаратов 200, вышедших через точку выхода из состава совокупности беспилотных летательных аппаратов, формирующих составной дисплей 300, при подлете к парковочным станциям 100 выходят из состава этой цепочки возвращающихся беспилотных летательных аппаратов с образованием по меньшей мере одной группы из двух, трех и более возвращающихся бесплотных летательных аппаратов 200.
В заключение, как показано на фиг. 1, управляющее устройство системы 500 обеспечивает возможность по существу одновременного или последовательного направления заменяемых бесплотных летательных аппаратов 200 из группы возвращающихся бесплотных летательных аппаратов, сформированных в вышеописанном положении (E), в соответствующие парковочные станции 100 со свободными или незанятыми зарядными устройствами. Таким образом, в заключение каждый из беспилотных летательных аппаратов 200 снова занимает положение (A), перед которым осуществляют отключение любых дополнительных авиационных двигателей или движителей (при наличии) и складывание крыла/крыльев (при наличии) с последующим переходом к осуществлению процесса посадки или приземления этого беспилотного летательного аппарата 200 в или на соответствующую одну из парковочных станций 100 и в котором указанный беспилотный летательный аппарат 200 находится в неподвижном состоянии с выключенными движителями 220. При занятии положения (A) блок питания беспилотного летательного аппарата 200 подключают к зарядному устройству парковочной станции 100 с обеспечением возможности восполнения запаса хода этого беспилотного летательного аппарата 200 и обеспечения возможности последующего хранения этого беспилотного летательного аппарата 200 в парковочной станции до момента получения от управляющего устройства системы 500 новых навигационных команд на вылет из своей парковочной станции 100 и направление в заданную область пространства для формирования в ней составного дисплея 300.
Способ визуализации изображения
На фиг. 12 показана блок-схема, иллюстрирующая основные операции способа 600 визуализации изображения, при этом способ 600 визуализации изображения, показанный на фиг. 12, может быть выполнен с использованием системы 500 для визуализации изображения, в основе которой лежит беспилотный летательный аппарат, показанный на фиг. 2, и которая может быть выполнена в соответствии с любым из релевантных вариантов реализации настоящего изобретения, описанных в данном документе (т.е. вариантов реализации настоящего изобретения, касающихся беспилотного летательного аппарата 200 по фиг. 2 и вариантов реализации системы 500 для визуализации изображения, в основе которой лежит использование беспилотных летательных аппаратов 200 по фиг. 2 для визуализации требуемого изображения).
В частности, способ 600 визуализации изображения, показанный на фиг. 12, включает следующие четыре основные операции или следующих четыре основных этапа 610, 620, 630 и 640, при этом на этапе 610 выдают навигационные команды и заданную модель построения беспилотных летательных аппаратов на беспилотные летательные аппараты 200, каждый из которых снабжен по меньшей мере одним дисплеем 230; на этапе 620 в ответ на указанные навигационные команды направляют указанные беспилотные летательные аппараты 200 по меньшей мере из одной парковочной станции 100 в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов 200 в заданном пространственном местоположении в соответствии с указанной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного составного дисплея 300 из указанных дисплеев 230; на этапе 630 выдают данные о статическом или динамическом изображении на беспилотные летательные аппараты 200 с обеспечением возможности отображения указанного изображения 400 на указанном составном дисплее 300; и на этапе 640 выдают навигационные команды на указанные беспилотные летательные аппараты 200, дисплеи 230 которых формируют указанный составной дисплей 300, с обеспечением возможности их перемещения в составе указанного составного дисплея с образованием по меньшей мере одной подвижной цепочки беспилотных летательных аппаратов.
В одном из вариантов реализации настоящего изобретения способ 600 визуализации изображения, показанный на фиг. 12, может включать дополнительные этапы, согласно которым: (i) принимают, посредством управляющего устройства системы 500, данные о запасе хода от каждого из беспилотных летательных аппаратов 200, дисплеи 230 которых формируют составной дисплей 300; (ii) выявляют, посредством управляющего устройства системы 500, каждый разряженный беспилотный летательный аппарат, запас хода которого меньше порогового значения, среди указанных беспилотных летательных аппаратах 200 на основании указанных данных о запасе хода; и (iii) направляют, посредством управляющего устройства системы 500, заряженный беспилотный летательные аппарат из парковочной станции 100 для замены указанного разряженного беспилотного летательного аппарата.
В другом варианте реализации в способе 600 визуализации изображения, показанном на фиг. 12, дополнительно направляют разряженный беспилотный летательный аппарат на парковочную станцию с обеспечением возможности восполнения его запаса хода. Кроме того, в способе 600 визуализации изображения, показанном на фиг. 12, дополнительно направляют беспилотный летательный аппарат с восполненным запасом хода в заданную область пространства с обеспечением возможности замены одного из разряженных беспилотных летательных аппаратов, дисплеи 230 которых формируют составной дисплей 300.
Еще в одном варианте реализации в способе 600 визуализации изображения, показанном на фиг. 12, дополнительно выдают, посредством управляющего устройства системы 500, навигационные команды на беспилотные летательные аппараты 200, дисплеи 230 которых формируют составной дисплей 300, с обеспечением возможности перестроения этих беспилотных летательных аппаратов 200 для изменения формы и/или размера составного дисплея 300.
В ином варианте реализации в способе 600 визуализации изображения, показанном на фиг. 12, дополнительно выдают, посредством управляющего устройства системы 500, навигационные команды на беспилотные летательные аппараты 200, дисплеи 230 которых формируют составной дисплей 300, с обеспечением возможности перестроения этих беспилотных летательных аппаратов 200 для разделения указанного составного дисплея 300 по меньшей мере на две отдельных дисплейных части для визуализации изображения.
В некотором варианте реализации в способе 600 визуализации изображения, показанном на фиг. 12, направленные беспилотные летательные аппараты 200 при размещении их в заданных пространственных местоположениях в соответствии с заданной моделью построения беспилотных летательных аппаратов формируют в воздухе по меньшей мере два составных дисплея 300.
В некотором ином варианте реализации в способе 600 визуализации изображения, показанном на фиг. 12, дополнительно выдают, посредством управляющего устройства системы 500, навигационные команды на беспилотные летательные аппараты 200, дисплеи 230 которых формируют составной дисплей 300, с обеспечением возможности перестроения этих беспилотных летательных аппаратов 200 для объединения двух и более (нескольких) составных дисплеев 300 по меньшей мере в одну единую дисплейную часть для визуализации изображения.
На фиг. 13 показана блок-схема, иллюстрирующая основные операции способа 650 визуализации изображения, при этом способ 650 визуализации изображения, показанный на фиг. 13, может быть выполнен с использованием системы 500 для визуализации изображения, в основе которой лежит беспилотный летательный аппарат, показанный на фиг. 4, и которая может быть выполнена в соответствии с любым из релевантных вариантов реализации настоящего изобретения, описанных в данном документе (т.е. вариантов реализации настоящего изобретения, касающихся беспилотного летательного аппарата 200 по фиг. 4 и вариантов реализации системы 500 для визуализации изображения, в основе которой лежит использование беспилотных летательных аппаратов 200 по фиг. 4 для визуализации требуемого изображения).
В частности, способ 650 визуализации изображения, показанный на фиг. 13, включает следующие четыре основные операции или следующих четыре основных этапа 660, 670, 680 и 690, при этом на этапе 660 выдают навигационные команды и заданную модель построения беспилотных летательных аппаратов на беспилотные летательные аппараты 200, каждый из которых снабжен по меньшей мере двумя управляемыми источниками 240 света, каждый из которых выполнен с возможностью излучения света с изменяемой длиной волны; на этапе 670 в ответ на указанные навигационные команды направляют указанные беспилотные летательные аппараты 200 по меньшей мере из одной парковочной станции 100 в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов 200 в заданном пространственном местоположении в соответствии с указанной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного дисплея из указанных управляемых источников 240 света, каждый из которых соответствует по меньшей мере одному пикселу указанного дисплея; на этапе 680 выдают данные о статическом или динамическом изображении на беспилотные летательные аппараты 200 с обеспечением возможности изменения длины волны излучения источников света указанных беспилотных летательных аппаратов 200 для отображения указанного изображения 400 на указанном дисплее; и на этапе 690 выдают навигационные команды на указанные беспилотные летательные аппараты 200, источники 240 света которых формируют указанный дисплей, с обеспечением возможности их перемещения в составе указанного дисплея с образованием по меньшей мере одной подвижной цепочки беспилотных летательных аппаратов.
На фиг. 14 показана блок-схема, иллюстрирующая основные операции способа 700 визуализации изображения, при этом способ 700 визуализации изображения, показанный на фиг. 14, может быть выполнен с использованием системы 500 для визуализации изображения, в основе которой лежит беспилотный летательный аппарат, показанный на фиг. 7, и которая может быть выполнена в соответствии с любым из релевантных вариантов реализации настоящего изобретения, описанных в данном документе (т.е. вариантов реализации настоящего изобретения, касающихся беспилотного летательного аппарата 200 по фиг. 7 и вариантов реализации системы 500 для визуализации изображения, в основе которой лежит использование беспилотных летательных аппаратов 200 по фиг. 7 для визуализации требуемого изображения).
В частности, способ 700 визуализации изображения, показанный на фиг. 14, включает следующие четыре основные операции или следующих четыре основных этапа 710, 720, 730 и 740, при этом на этапе 710 выдают навигационные команды и заданную модель построения беспилотных летательных аппаратов на беспилотные летательные аппараты 200, каждый из которых снабжен по меньшей мере одним источником 260 белого света, выполненным с возможностью излучения света белого цвета, и по меньшей мере одним управляемым источником 240 света, выполненным с возможностью излучения света с изменяемой длиной волны; на этапе 720 в ответ на указанные навигационные команды направляют указанные беспилотные летательные аппараты 200 по меньшей мере из одной парковочной станции 100 в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов 200 в заданном пространственном местоположении в соответствии с указанной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного дисплея из указанных источников 240, 250 света, каждый из которых соответствует по меньшей мере одному пикселу указанного дисплея; на этапе 730 выдают данные о статическом или динамическом изображении на беспилотные летательные аппараты 200 с обеспечением возможности излучения света белого цвета указанным источником 260 белого света и возможности изменения длины волны излучения указанных управляемых источников 240 света беспилотных летательных аппаратов 200 для отображения указанного изображения на указанном дисплее; и на этапе 740 выдают навигационные команды на указанные беспилотные летательные аппараты 200, источники 240, 260 света которых формируют указанный дисплей, с обеспечением возможности их перемещения в составе указанного дисплея с образованием по меньшей мере одной подвижной цепочки беспилотных летательных аппаратов.
На фиг. 15 показана блок-схема, иллюстрирующая основные операции способа 750 визуализации изображения, при этом способ 750 визуализации изображения, показанный на фиг. 15, может быть выполнен с использованием системы 500 для визуализации изображения, в основе которой лежит беспилотный летательный аппарат, показанный на фиг. 5, и которая может быть выполнена в соответствии с любым из релевантных вариантов реализации настоящего изобретения, описанных в данном документе (т.е. вариантов реализации настоящего изобретения, касающихся беспилотного летательного аппарата 200 по фиг. 5 и вариантов реализации системы 500 для визуализации изображения, в основе которой лежит использование беспилотных летательных аппаратов 200 по фиг. 5 для визуализации требуемого изображения).
В частности, способ 750 визуализации изображения, показанный на фиг. 15, включает следующие четыре основные операции или следующих четыре основных этапа 760, 770, 780 и 790, при этом на этапе 760 выдают навигационные команды и заданную модель построения беспилотных летательных аппаратов на беспилотные летательные аппараты 200, каждый из которых снабжен по меньшей мере одним экраном 250; на этапе 770 в ответ на указанные навигационные команды направляют указанные беспилотные летательные аппараты 200 по меньшей мере из одной парковочной станции 100 в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов 200 в заданном пространственном местоположении в соответствии с указанной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного составного экрана из указанных экранов 250; на этапе 780 выдают данные о статическом или динамическом изображении на проекционное устройство (не показано) с обеспечением возможности проецирования указанного изображения на указанном составном экране; и на этапе 790 выдают навигационные команды на указанные беспилотные летательные аппараты 200, экраны 250 которых формируют указанный составной экран, с обеспечением возможности их перемещения в составе указанного составного экрана с образованием по меньшей мере одной подвижной цепочки беспилотных летательных аппаратов.
На фиг. 16 показана блок-схема, иллюстрирующая основные операции способа 800 визуализации изображения, при этом способ 800 визуализации изображения, показанный на фиг. 16, может быть выполнен с использованием системы 500 для визуализации изображения, в основе которой лежит беспилотный летательный аппарат, показанный на фиг. 6, и которая может быть выполнена в соответствии с любым из релевантных вариантов реализации настоящего изобретения, описанных в данном документе (т.е. вариантов реализации настоящего изобретения, касающихся беспилотного летательного аппарата 200 по фиг. 6 и вариантов реализации системы 500 для визуализации изображения, в основе которой лежит использование беспилотных летательных аппаратов 200 по фиг. 6 для визуализации требуемого изображения).
В частности, способ 800 визуализации изображения, показанный на фиг. 16, включает следующие четыре основные операции или следующих четыре основных этапа 810, 820, 830 и 840, при этом на этапе 810 выдают навигационные команды и заданную модель построения беспилотных летательных аппаратов на беспилотные летательные аппараты 200, каждый из которых снабжен корпусом или каркасом в виде фюзеляжа 210; на этапе 820 в ответ на указанные навигационные команды направляют указанные беспилотные летательные аппараты 200 по меньшей мере из одной парковочной станции 100 в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов 200 в заданном пространственном местоположении в соответствии с указанной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного экрана из указанных корпусов или каркасов в виде фюзеляжа 210; на этапе 830 выдают данные о статическом или динамическом изображении на проекционное устройство (не показано), входящее в состав системы 500, с обеспечением возможности проецирования указанного изображения на указанном сформированном экране; и на этапе 840 выдают навигационные команды на указанные беспилотные летательные аппараты 200, корпуса или каркасы в виде фюзеляжа 210 которых формируют указанный экран, с обеспечением возможности их перемещения в составе указанного сформированного экрана с образованием по меньшей мере одной подвижной цепочки беспилотных летательных аппаратов.
На фиг. 17 показана блок-схема, иллюстрирующая основные операции способа 850 визуализации изображения, при этом способ 850 визуализации изображения, показанный на фиг. 17, может быть выполнен с использованием системы 500 для визуализации изображения, в основе которой лежит беспилотный летательный аппарат, показанный на фиг. 7, и которая может быть выполнена в соответствии с любым из релевантных вариантов реализации настоящего изобретения, описанных в данном документе (т.е. вариантов реализации настоящего изобретения, касающихся беспилотного летательного аппарата 200 по фиг. 7 и вариантов реализации системы 500 для визуализации изображения, в основе которой лежит использование беспилотных летательных аппаратов 200 по фиг. 7 для визуализации требуемого изображения).
В частности, способ 850 визуализации изображения, показанный на фиг. 17, включает следующие четыре основные операции или следующих четыре основных этапа 860, 870, 880 и 890, при этом на этапе 860 выдают навигационные команды и заданную модель построения беспилотных летательных аппаратов на беспилотные летательные аппараты 200, каждый из которых снабжен по меньшей мере одним источником 260 белого света, выполненным с возможностью излучения света белого цвета, и по меньшей мере одним управляемым источником 240 света, выполненным с возможностью излучения света с изменяемой длиной волны; на этапе 870 в ответ на указанные навигационные команды направляют указанные беспилотные летательные аппараты 200 по меньшей мере из одной парковочной станции 100 в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов 200 в заданном пространственном местоположении в соответствии с указанной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного дисплея из указанных источников 240, 260 света; на этапе 880 выдают данные о статическом или динамическом изображении на указанные беспилотные летательные аппараты 200 с обеспечением возможности излучения света белого цвета указанными источниками 260 белого света беспилотных летательных аппаратов 200 и возможности изменения длины волны излучения указанных управляемых источников 240 света беспилотных летательных аппаратов 200 для отображения указанного изображения на указанном сформированном дисплее; и на этапе 890 выдают навигационные команды на указанные беспилотные летательные аппараты 200, источники 240, 260 света которых формируют указанный дисплей, с обеспечением возможности их перемещения в составе указанного сформированного дисплея с образованием по меньшей мере одной подвижной цепочки беспилотных летательных аппаратов.
На фиг. 18 показана блок-схема, иллюстрирующая основные операции способа 900 визуализации изображения, при этом способ 900 визуализации изображения, показанный на фиг. 18, может быть выполнен с использованием системы 500 для визуализации изображения, в основе которой лежит беспилотный летательный аппарат, показанный на фиг. 8, и которая может быть выполнена в соответствии с любым из релевантных вариантов реализации настоящего изобретения, описанных в данном документе (т.е. вариантов реализации настоящего изобретения, касающихся беспилотного летательного аппарата 200 по фиг. 8 и вариантов реализации системы 500 для визуализации изображения, в основе которой лежит использование беспилотных летательных аппаратов 200 по фиг. 8 для визуализации требуемого изображения).
В частности, способ 900 визуализации изображения, показанный на фиг. 18, включает следующие четыре основные операции или следующих четыре основных этапа 910, 920, 930 и 940, при этом на этапе 910 выдают навигационные команды и заданную модель построения беспилотных летательных аппаратов на беспилотные летательные аппараты 200, каждый из которых снабжен по меньшей мере одним экраном 250 и проекционным устройством 270; на этапе 920 в ответ на указанные навигационные команды направляют указанные беспилотные летательные аппараты 200 по меньшей мере из одной парковочной станции 100 в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов 200 в заданном пространственном местоположении в соответствии с указанной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного составного экрана из указанных экранов 250; на этапе 930 выдают данные о статическом или динамическом изображении на проекционные устройства 270 беспилотных летательных аппаратов 200 с обеспечением возможности проецирования указанного изображения на указанном составном экране; и на этапе 940 выдают навигационные команды на указанные беспилотные летательные аппараты 200, экраны 250 которых формируют указанный составной экран, с обеспечением возможности их перемещения в составе указанного составного экрана с образованием по меньшей мере одной подвижной цепочки беспилотных летательных аппаратов.
На фиг. 19 показана блок-схема, иллюстрирующая основные операции способа 950 визуализации изображения, при этом способ 950 визуализации изображения, показанный на фиг. 19, может быть выполнен с использованием системы 500 для визуализации изображения, в основе которой лежит беспилотный летательный аппарат, показанный на фиг. 9, и которая может быть выполнена в соответствии с любым из релевантных вариантов реализации настоящего изобретения, описанных в данном документе (т.е. вариантов реализации настоящего изобретения, касающихся беспилотного летательного аппарата 200 по фиг. 9 и вариантов реализации системы 500 для визуализации изображения, в основе которой лежит использование беспилотных летательных аппаратов 200 по фиг. 9 для визуализации требуемого изображения).
В частности, способ 950 визуализации изображения, показанный на фиг. 19, включает следующие четыре основные операции или следующих четыре основных этапа 960, 990, 980 и 990, при этом на этапе 960 выдают навигационные команды и заданную модель построения беспилотных летательных аппаратов на беспилотные летательные аппараты 200, каждый из которых снабжен корпусом или каркасом в виде фюзеляжа 210 и проекционным устройством 270; на этапе 970 в ответ на указанные навигационные команды направляют указанные беспилотные летательные аппараты 200 по меньшей мере из одной парковочной станции 100 в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов 200 в заданном пространственном местоположении в соответствии с указанной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного экрана из указанных корпусов или каркасов в виде фюзеляжа 210 беспилотных летательных аппаратов 200; на этапе 980 выдают данные о статическом или динамическом изображении на проекционные устройства 270 беспилотных летательных аппаратов 200 с обеспечением возможности проецирования указанного изображения на указанном сформированном экране; и на этапе 990 выдают навигационные команды на указанные беспилотные летательные аппараты 200, корпуса или каркасы в виде фюзеляжа 210 которых формируют указанный экран, с обеспечением возможности их перемещения в составе указанного сформированного экрана с образованием по меньшей мере одной подвижной цепочки беспилотных летательных аппаратов.
Представленные иллюстративные варианты осуществления настоящего изобретения, примеры и описание служат лишь для обеспечения понимания сущности заявляемого изобретения и не являются ограничивающими. Иные возможные варианты осуществления настоящего изобретения, либо модификации или улучшения вышеописанных вариантов реализации настоящего изобретения будут ясны специалисту в данной области техники из представленного выше описания. Объем настоящего изобретения ограничен лишь прилагаемой формулой изобретения.
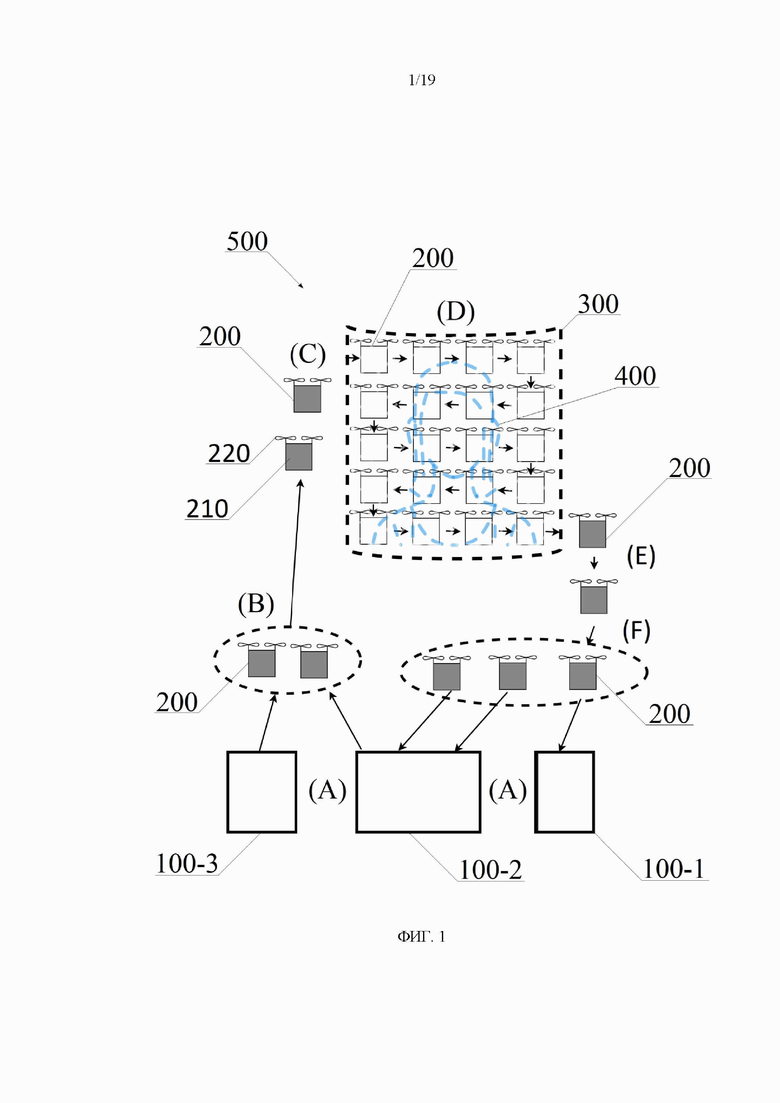


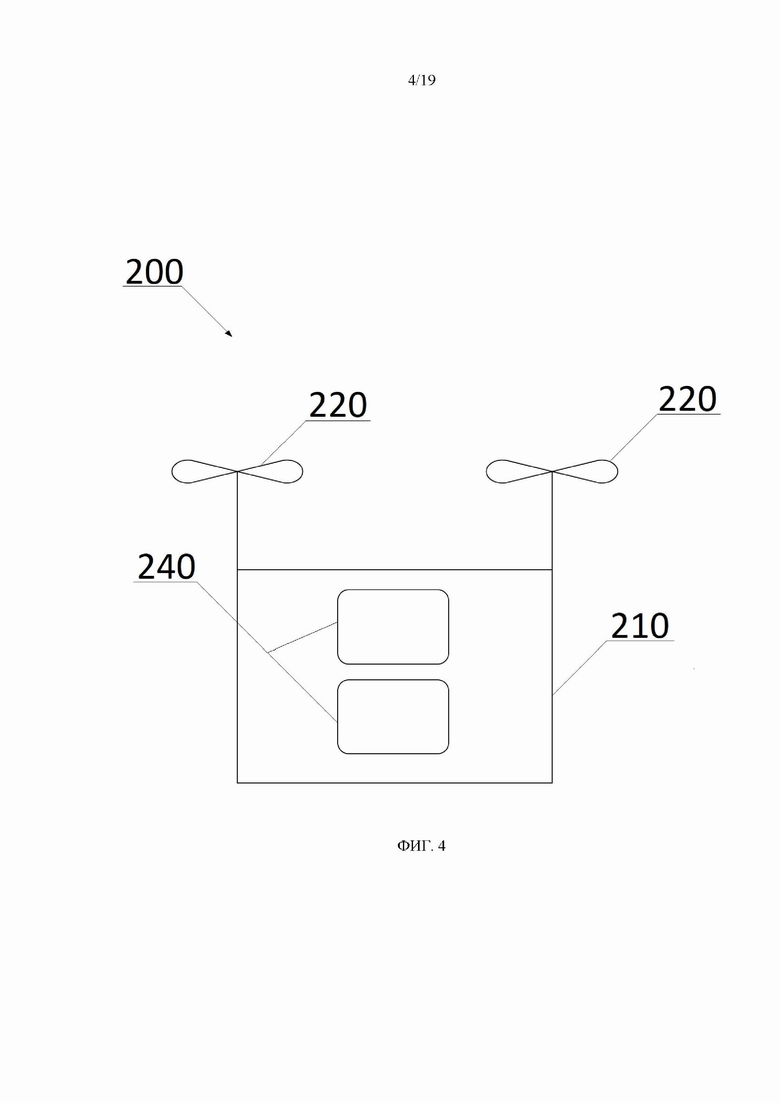




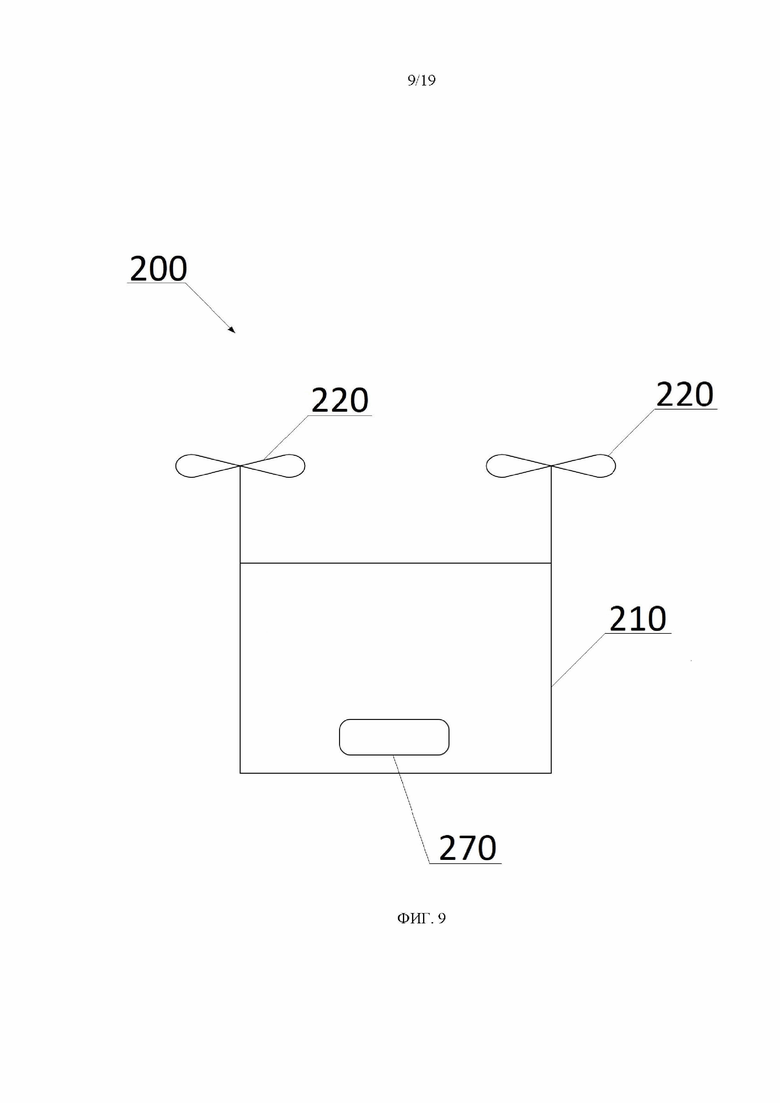


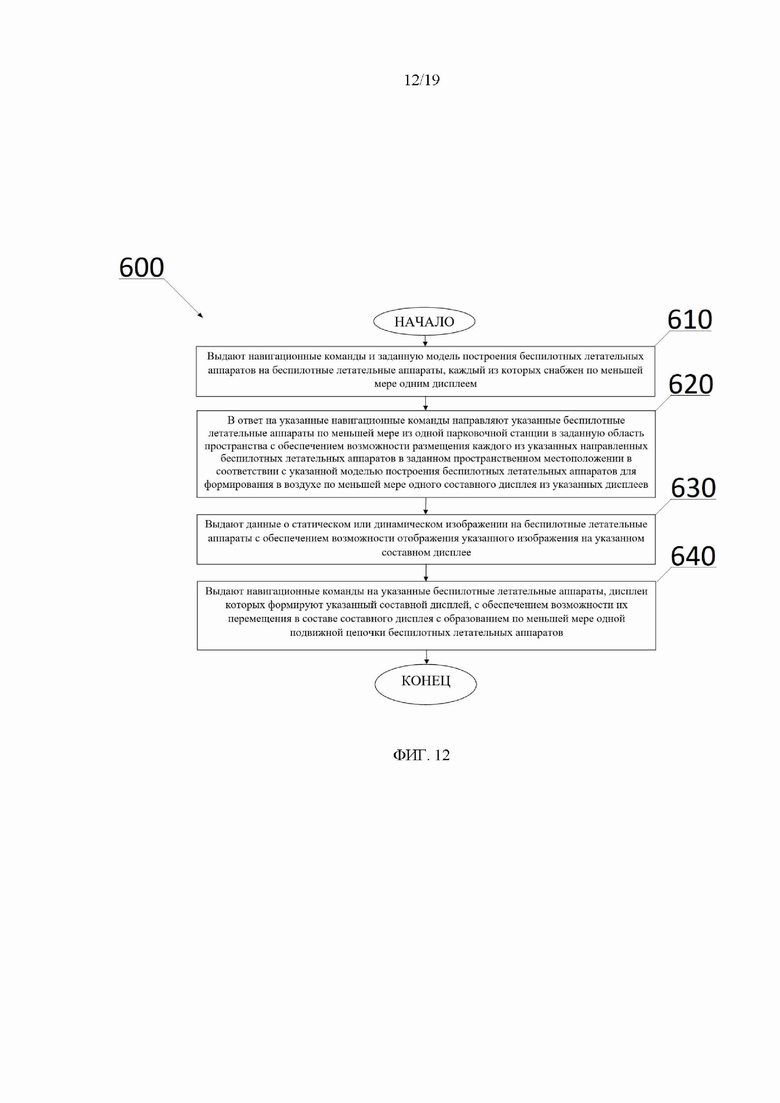
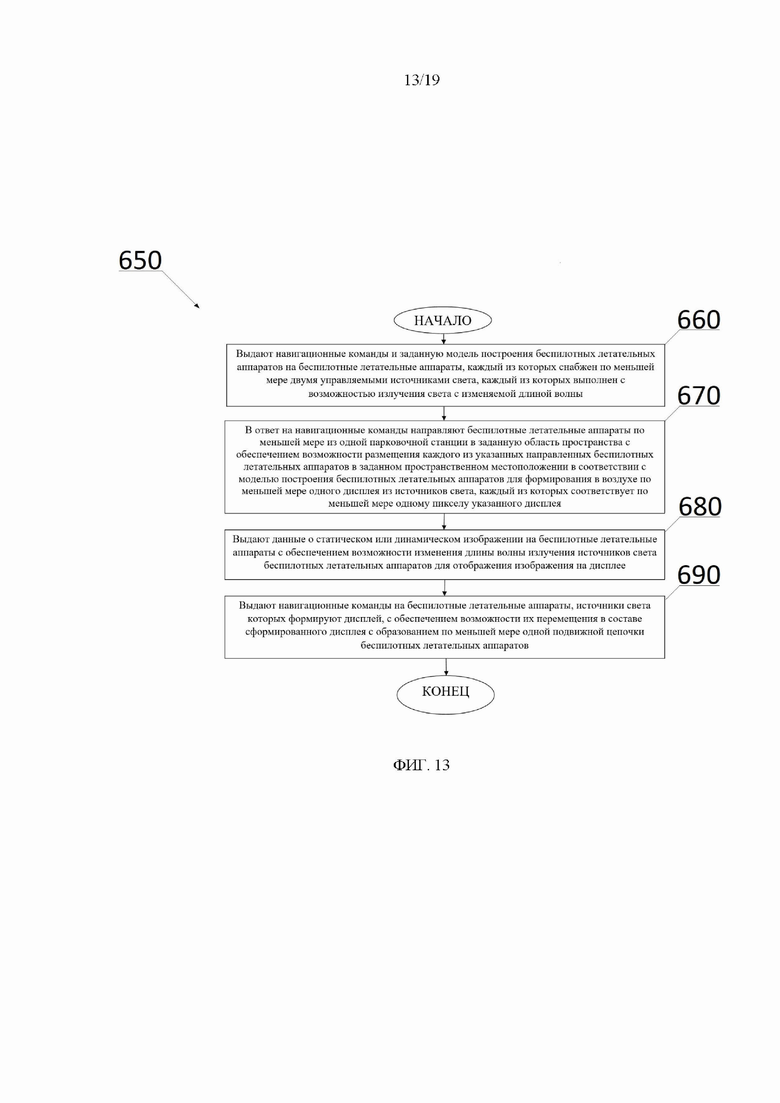


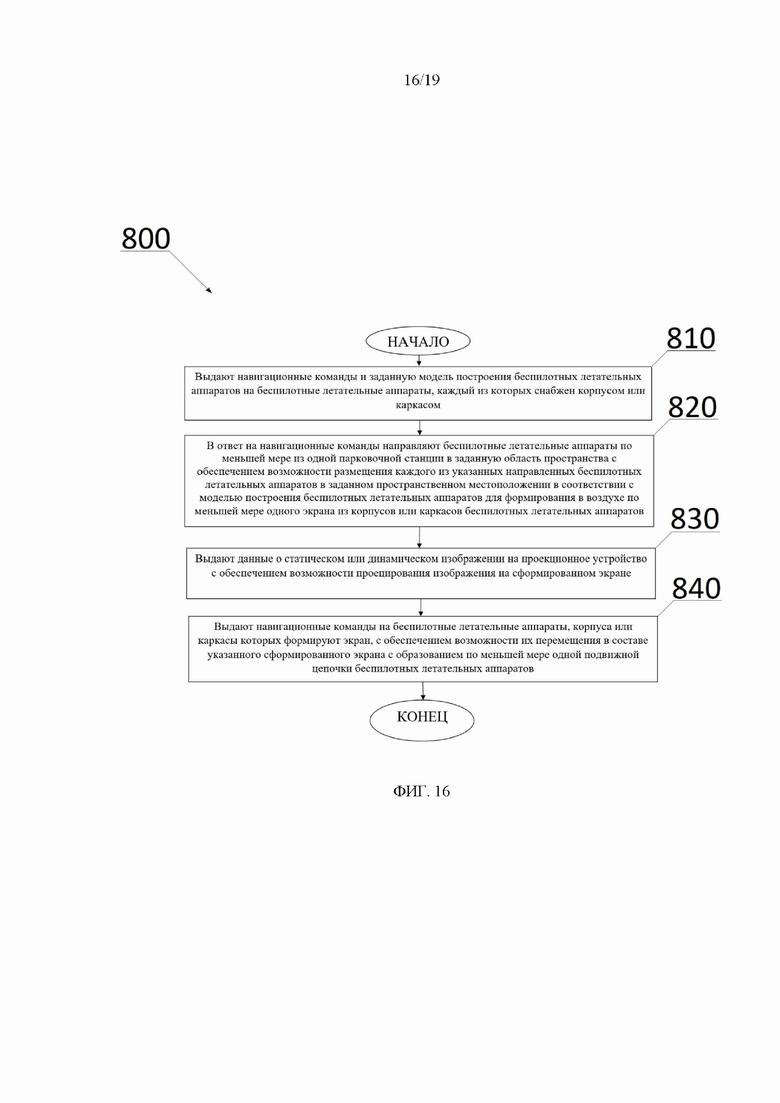

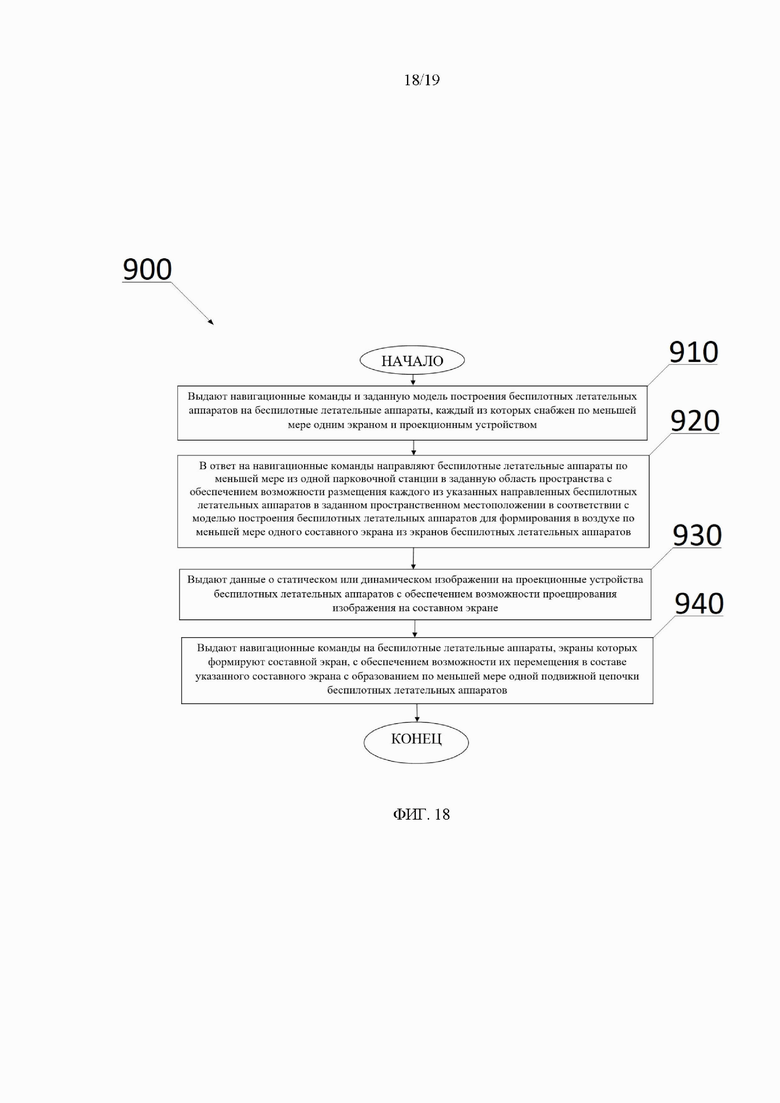
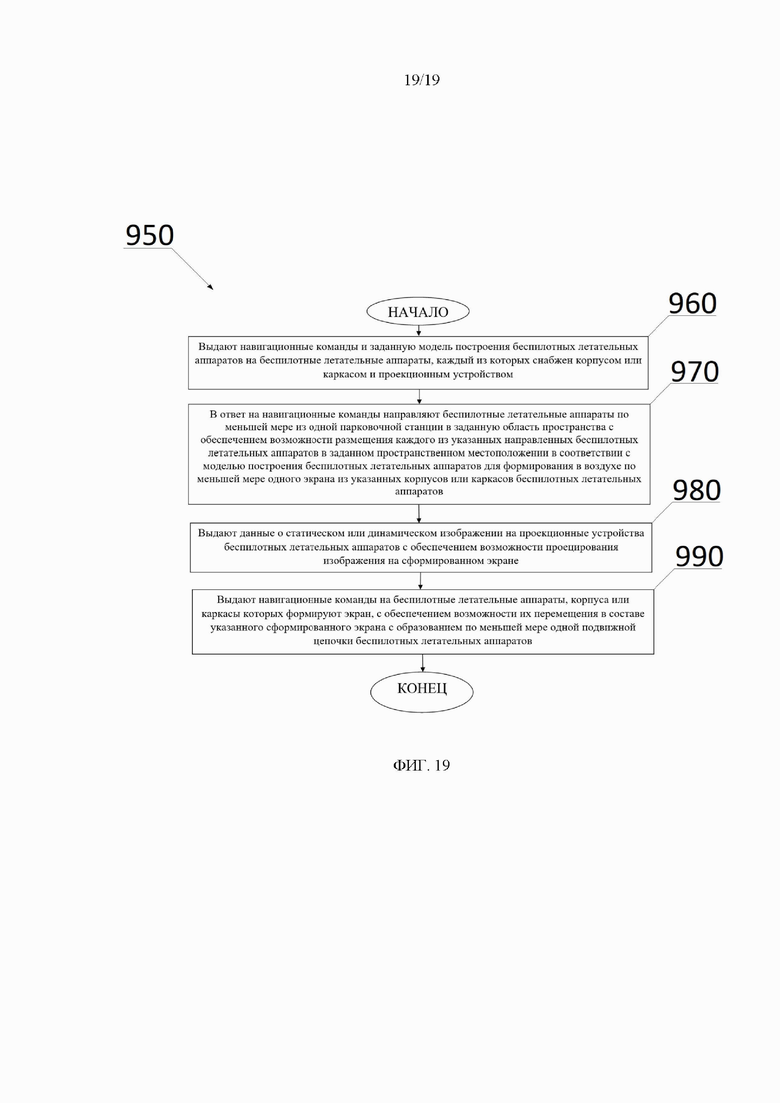
Изобретение относится к области формирования изображений и касается системы для визуализации изображений. Система содержит парковочные станции, беспилотные летательные аппараты, которые размещены в парковочных станциях, и управляющее устройство. Управляющее устройство выполнено с возможностью направления беспилотных летательных аппаратов из парковочных станций в заданную область пространства с обеспечением возможности размещения беспилотных летательных аппаратов в заданном пространственном местоположении для формирования в воздухе составного дисплея. Кроме того, управляющее устройство выполнено с возможностью выдачи данных об изображении на беспилотные летательные аппараты с обеспечением возможности отображения изображения по меньшей мере на части составного дисплея. Беспилотные летательные аппараты, которые формируют составной дисплей, образуют по меньшей мере одну подвижную цепочку беспилотных летательных аппаратов в составе составного дисплея. Технический результат заключается в разработке универсального средства визуализации изображений, в частности создании двухмерных (2D) или трехмерных (3D) подвижных в пространстве изображений, обеспечивающего масштабируемость, возможность формирования изображений как в помещении, так и на открытом воздухе, удобство транспортировки, возможность автоматического разворачивания и сворачивания конструкции, а также в уменьшении вероятности ухудшения качества изображения при осуществлении замены беспилотных летательных аппаратов, которые задействованы в визуализации изображения на составном дисплее и при перемещении составного дисплея в воздухе. 16 н. и 98 з.п. ф-лы, 19 ил.
1. Система для визуализации изображения, содержащая:
одну или более парковочных станций,
беспилотные летательные аппараты, которые размещены в парковочных станциях и каждый из которых снабжен по меньшей мере одним дисплеем, и
управляющее устройство, соединенное с возможностью обмена данными с беспилотными летательными аппаратами и выполненное с возможностью направления по меньшей мере части из указанных беспилотных летательных аппаратов по меньшей мере из одной парковочной станции из указанных парковочных станций в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с заданной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного составного дисплея из указанных дисплеев,
при этом управляющее устройство выполнено с возможностью выдачи данных об изображении на указанные направленные беспилотные летательные аппараты с обеспечением возможности отображения указанного изображения по меньшей мере на части указанного составного дисплея, а
беспилотные летательные аппараты, дисплеи которых формируют указанный составной дисплей, образуют по меньшей мере одну подвижную цепочку беспилотных летательных аппаратов в составе указанного составного дисплея.
2. Система по п. 1, в которой каждый из указанных беспилотных летательных аппаратов дополнительно снабжен модулем определения местоположения, выполненным с возможностью определения пространственных координат указанного беспилотного летательного аппарата в реальном времени, и выполнен с возможностью выдачи определенных пространственных координат на управляющее устройство, а управляющее устройство дополнительно выполнено с возможностью выдачи навигационных команд на беспилотные летательные аппараты для изменения их курса перемещения в случае установления на основании их пространственных координат, что расстояние между ними меньше порогового значения.
3. Система по п. 1, в которой каждый из указанных беспилотных летательных аппаратов дополнительно снабжен измерительными датчиками для измерения параметров полета беспилотного летательного аппарата и дополнительно выполнен с возможностью выдачи указанных измеренных параметров полета беспилотного летательного аппарата на управляющее устройство, а управляющее устройство дополнительно выполнено с возможностью выдачи навигационных команд на каждый беспилотный летательный аппарат для изменения его курса перемещения и/или режима работы в случае, если по меньшей мере один из его параметров полета не соответствует пороговому значению или выходит за пределы диапазона пороговых значений.
4. Система по п. 1, в которой каждый из беспилотных летательных аппаратов снабжен по меньшей мере одним источником питания и дополнительно выполнен с возможностью выдачи в реальном времени данных о запасе хода на управляющее устройство с обеспечением возможности его замены по меньшей мере на один другой беспилотный летательный аппарат по меньшей мере из одной из указанных парковочных станций в случае, если запас хода указанного заменяемого беспилотного летательного аппарата ниже заданного порогового значения.
5. Система по п. 1, в которой каждый из беспилотных летательных аппаратов дополнительно выполнен с возможностью выдачи в реальном времени данных о работе своего дисплея на управляющее устройство с обеспечением возможности его замены по меньшей мере на один другой беспилотный летательный аппарат по меньшей мере из одной из указанных парковочных станций в случае выхода его дисплея из строя.
6. Система по п. 1, в которой каждый из беспилотных летательных аппаратов дополнительно снабжен измерительными датчиками для измерения параметров состояния конструкции беспилотного летательного аппарата и дополнительно выполнен с возможностью выдачи в реальном времени измеренных параметров состояния конструкции беспилотного летательного аппарата на управляющее устройство с обеспечением возможности его замены по меньшей мере на один другой беспилотный летательный аппарат по меньшей мере из одной из указанных парковочных станций в случае, если по меньшей мере один из указанных параметров состояния конструкции беспилотного летательного аппарата не соответствует пороговому значению или выходит за пределы диапазона пороговых значений.
7. Система по п. 4, в которой указанный по меньшей мере один источник питания содержит каждый по меньшей мере одно из группы, содержащей: аккумуляторную батарею, генератор на основе двигателя внутреннего сгорания, генератор на основе водородного двигателя и солнечную батарею.
8. Система по п. 4 или 7, в которой по меньшей мере одна из указанных парковочных станций дополнительно снабжена по меньшей мере одним зарядным устройством, а управляющее устройство дополнительно выполнено с возможностью направления каждого разряженного беспилотного летательного аппарата на указанную по меньшей мере одну парковочную станцию с обеспечением возможности его подключения к одному из указанных зарядных устройств для восполнения запаса хода разряженного беспилотного летательного аппарата.
9. Система по п. 8, в которой каждое из указанных зарядных устройств представляет собой беспроводное зарядное устройство или проводное зарядное устройство.
10. Система по п. 8, в которой беспилотные летательные аппараты выполнены с возможностью последовательного или параллельного электрического соединения друг с другом при размещении на парковочной станции с обеспечением возможности их подключения к зарядному устройству для одновременного восполнения их запаса хода.
11. Система по п. 8, в которой каждый из указанных беспилотных летательных аппаратов дополнительно снабжен устройством обнаружения, выполненным с возможностью определения расстояния до других беспилотных летательных аппаратов в зоне действия устройства обнаружения, и дополнительно выполнен с возможностью изменения своего пространственного местоположения, курса перемещения и/или режима работы в случае, если расстояние до обнаруженного беспилотного летательного аппарата меньше порогового значения, или дополнительно выполнен с возможностью выдачи данных об определенных значениях расстояния до обнаруженных беспилотных летательных аппаратов на управляющее устройство с обеспечением возможности изменения пространственного местоположения, курса перемещения и/или режима работы указанного беспилотного летательного аппарата или указанного обнаруженного беспилотного летательного аппарата в случае, если расстояние до этого обнаруженного беспилотного летательного аппарата меньше порогового значения.
12. Система по п. 1, в которой каждый из указанных беспилотных летательных аппаратов снабжен двумя дисплеями, размещенными на указанном беспилотном летательном аппарате таким образом, что они обращены в противоположные стороны по отношению друг к другу, при этом при формировании составного дисплея один из указанных дисплеев образует одну из двух противоположных сторон составного дисплея, а другой из указанных дисплеев образует другую сторону составного дисплея.
13. Система по п. 12, в которой управляющее устройство обеспечивает возможность отображения одного и того же изображения с обеих сторон указанного составного дисплея, отображения изображения с одной из сторон указанного составного дисплея или отображения разных изображений на противоположных сторонах указанного составного дисплея.
14. Система по п. 1 или 13, в которой отображаемое изображение представляет собой статическое изображение или динамическое изображение.
15. Система по п. 1, в которой управляющее устройство дополнительно выполнено с возможностью выдачи навигационных команд на беспилотные летательные аппараты, дисплеи которых формируют составной дисплей, с обеспечением возможности перестроения этих беспилотных летательных аппаратов для изменения формы и/или размера составного дисплея.
16. Система по п. 1 или 15, в которой составной дисплей представляет собой двухмерный дисплей или трехмерный дисплей.
17. Система по п. 1, в которой беспилотные летательные аппараты, дисплеи которых формируют составной дисплей, разделены по меньшей мере на две группы, при этом беспилотные летательные аппараты в одной из указанных групп имеют скорость перемещения и/или направление перемещения, отличные от беспилотных летательных аппаратов в другой группе из указанных групп.
18. Система по п. 1, в которой беспилотные летательные аппараты, дисплеи которых формируют составной дисплей, разделены по меньшей мере на две группы, при этом дисплеи, которыми снабжены беспилотные летательные аппараты в одной из указанных групп, имеют разные габаритные размеры, частоту обновления и/или яркость, отличные от дисплеев беспилотных летательных аппаратов в другой группе из указанных групп.
19. Система по п. 1, в которой беспилотные летательные аппараты, дисплеи которых формируют составной дисплей, сохраняют свое пространственное местоположение в течение периода времени, соответствующего продолжительности отображения изображения.
20. Система по п. 1, в которой беспилотные летательные аппараты, дисплеи которых формируют составной дисплей, разделены по меньшей мере на две группы, а управляющее устройство обеспечивает возможность отображения на части составного дисплея, образованной из дисплеев беспилотных летательных аппаратов, относящихся к одной из указанных групп, изображения, отличного от изображения, отображаемого на другой части составного дисплея, образованной из дисплеев беспилотных летательных аппаратов, относящихся к другой группе из указанных групп.
21. Система по п. 1, в которой беспилотные летательные аппараты, дисплеи которых формируют составной дисплей, разделены по меньшей мере на две группы, а управляющее устройство обеспечивает возможность отображения одного и того же изображения на одной части составного дисплея, образованной из дисплеев беспилотных летательных аппаратов, относящихся к одной из указанных групп, и на другой части составного дисплея, образованной из дисплеев беспилотных летательных аппаратов, относящихся к другой группе из указанных групп.
22. Система по п. 1, в которой беспилотные летательные аппараты, направляемые в заданную область пространства, разделены на две группы, при этом дисплеи беспилотных летательных аппаратов из первой группы формируют первый слой составного дисплея, а дисплеи беспилотных летательных аппаратов из второй группы формируют второй слой составного дисплея.
23. Система по п. 22, в которой управляющее устройство обеспечивает возможность отображения на дисплеях из первого слоя составного дисплея изображения, отличного от изображения, отображаемого на дисплеях из второго слоя составного дисплея, или совпадающего с ним.
24. Система по п. 22, в которой управляющее устройство обеспечивает возможность отображения основного изображения на дисплеях из первого слоя составного дисплея и обеспечивает возможность отображения на дисплеях из второго слоя составного дисплея другого изображения, являющегося фоновым для указанного основного изображения.
25. Система по п. 1, в которой каждый из дисплеев беспилотных летательных аппаратов представляет собой один из группы дисплеев, содержащей: LCD-дисплей, LED-дисплей, OLED-дисплей, AMOLED-дисплей, DLP-дисплей, TFT-дисплей, IPS-дисплей, TN-дисплей, STN-дисплей, CSTN-дисплей, FSTN-дисплей, DSTN-дисплей, DLP-дисплей, TFD-дисплей, LTPS-дисплей, UFB-дисплей, CRT-дисплей, PDP-дисплей и лазерный дисплей.
26. Система по п. 1, в которой беспилотные летательные аппараты выполнены с возможностью разъемного взаимодействия друг с другом при формировании составного дисплея из дисплеев взаимодействующих беспилотных летательных аппаратов.
27. Система по п. 1, в которой по меньшей мере два из беспилотных летательных аппаратов, направляемых в заданную область пространства, выполнены с возможностью механического соединения друг с другом с образованием составного беспилотного летательного аппарата, выполненного с возможностью разъемного взаимодействия по меньшей мере с одним другим беспилотным летательным аппаратом из указанных беспилотных летательных аппаратов при формировании составного дисплея.
28. Система по п. 1, в которой беспилотные летательные аппараты, направляемые в заданную область пространства, выполнены с возможностью механического соединения друг с другом с образованием составных беспилотных летательных аппаратов, а управляющее устройство обеспечивает возможность формирования составного дисплея из дисплеев указанных составных беспилотных летательных аппаратов.
29. Система по п. 1, в которой беспилотные летательные аппараты, дисплеи которых формируют составной дисплей, смещены в пространстве по отношению друг к другу по меньшей мере по одной из трех координатных осей таким образом, что составной дисплей имеет вогнутую форму, выпуклую форму или криволинейную форму.
30. Система по п. 1, в которой беспилотные летательные аппараты, дисплеи которых формируют составной дисплей, образуют заданное количество последовательно расположенных горизонтальных или вертикальных рядов, в каждом из которых беспилотные летательные аппараты совершают перемещение друг за другом в сторону конца ряда с обеспечением возможности возврата в начало ряда при выходе за пределы указанного конца ряда.
31. Система по п. 30, в которой указанные перемещающиеся друг за другом беспилотные летательные аппараты и соответствующие возвращающиеся беспилотные летательные аппараты образуют замкнутую цепочку беспилотных летательных аппаратов.
32. Система по п. 31, в которой управляющее устройство обеспечивает возможность отображения соответствующей части изображения дисплеями перемещающихся друг за другом беспилотных летательных аппаратов и возможность выключения или затемнения дисплеев возвращающихся беспилотных летательных аппаратов.
33. Система по п. 31 или 32, в которой управляющее устройство обеспечивает возможность замены каждого разряженного беспилотного летательного аппарата на заряженный беспилотный летательный аппарат при возврате разряженного беспилотного летательного аппарата в начало соответствующего одного из рядов беспилотных летательных аппаратов.
34. Система по п. 33, в которой управляющее устройство дополнительно обеспечивает возможность направления разряженного беспилотного летательного аппарата на парковочную станцию для восполнения его запаса хода и возможность возврата указанного беспилотного летательного аппарата с восполненным запасом хода с обеспечением замены одного из других разряженных беспилотных летательных аппаратов.
35. Система по п. 34, в которой управляющее устройство обеспечивает возможность замены разряженного беспилотного летательного аппарата на заряженный беспилотный летательный аппарат при нахождении разряженного беспилотного летательного аппарата в пространственном местоположении, расположенном на наименьшем расстоянии от места его зарядки.
36. Система по п. 4, в которой управляющее устройство обеспечивает возможность направления заряженных беспилотных летательных аппаратов в заданную область пространства в количестве, соответствующем количеству беспилотных летательных аппаратов, дисплеи которых формируют составной дисплей, с обеспечением возможности их по существу одновременной замены на указанные заряженные беспилотные летательные аппараты.
37. Система по п. 36, в которой управляющее устройство дополнительно обеспечивает возможность формирования в указанной области пространства подменного составного дисплея из указанных заряженных беспилотных летательных аппаратов, являющегося копией заменяемого составного дисплея, с обеспечением возможности замены заменяемого составного дисплея на подменный составной дисплей, при этом управляющее устройство по существу одновременно выдает управляющие команды на беспилотные летательные аппараты, дисплеи которых формируют заменяемый составной дисплей, с обеспечением выключения, затемнения или сокрытия этих дисплеев и выдает управляющие команды на беспилотные летательные аппараты, дисплеи которых формируют подменный составной дисплей, с обеспечением включения этих дисплеев.
38. Система по п. 37, в которой управляющее устройство дополнительно обеспечивает возможность отображения на подменном составном дисплее изображения, совпадающего с изображением, отображаемым замененным составным дисплеем, или изображения, являющегося продолжением визуального ряда изображения, отображаемого замененным составным дисплеем.
39. Система по п. 37, в которой управляющее устройство дополнительно обеспечивает возможность замены заменяемого составного дисплея на подменный составной дисплей по истечении заданного периода времени.
40. Система по п. 1, в которой беспилотные летательные аппараты, дисплеи которых формируют составной дисплей, разделены по меньшей мере на две группы, в каждой из которых дисплеи беспилотных летательных аппаратов формируют одну из частей составного дисплея, при этом управляющее устройство дополнительно обеспечивает возможность формирования в указанной области пространства по меньшей мере одной подменной части составного дисплея из заряженных беспилотных летательных аппаратов, направленных в указанную область пространства, с обеспечением возможности замены заменяемой части составного дисплея на указанную подменную часть составного дисплея.
41. Система по п. 40, в которой при замене заменяемой части составного дисплея на подменную часть составного дисплея управляющее устройство по существу одновременно выдает управляющие команды на беспилотные летательные аппараты, дисплеи которых формируют заменяемую часть составного дисплея, с обеспечением выключения, затемнения или сокрытия этих дисплеев и управляющие команды на беспилотные летательные аппараты, дисплеи которых формируют подменную часть составного дисплея, с обеспечением включения этих дисплеев.
42. Система по п. 1, в которой беспилотные летательные аппараты, направляемые в заданную область пространства, разделены на группы, в каждой из которых дисплеи беспилотных летательных аппаратов формируют один из слоев составного дисплея, при этом управляющее устройство дополнительно обеспечивает возможность отображения на каждом из указанных сформированных слоев составного дисплея одной из составных частей трехмерного изображения, одного и того же двумерного изображения или разных двумерных изображений.
43. Система по п. 1, в которой каждый из беспилотных летательных аппаратов снабжен по меньшей мере одним источником питания и дополнительно выполнен с возможностью выдачи в реальном времени данных о запасе хода на управляющее устройство с обеспечением возможности направления каждого разряженного беспилотного летательного аппарата из беспилотных летательных аппаратов, дисплеи которых формируют составной дисплей, на одну из указанных парковочных станций и обеспечением возможности перестроения оставшихся беспилотных летательных аппаратов, дисплеи которых формируют составной дисплей, для изменения или сохранения формы и/или размера составного дисплея.
44. Система по п. 1, в которой управляющее устройство дополнительно выполнено с возможностью направления в указанную область пространства дополнительных беспилотных летательных аппаратов по меньшей мере из одной из указанных парковочных станций с обеспечением возможности их встраивания в структуру составного дисплея для изменения формы и/или размера составного дисплея.
45. Система по п. 1, в которой беспилотные летательные аппараты, дисплеи которых формируют составной дисплей, разделены на группы, в каждой из которых дисплеи беспилотных летательных аппаратов формируют одну из частей составного дисплея, при этом при формировании составного дисплея управляющее устройство обеспечивает возможность построения указанных беспилотных летательных аппаратов таким образом, что по меньшей мере одна из указанных частей составного дисплея имеет форму и/или размеры, отличные от остальных частей составного дисплея.
46. Система по п. 1, в которой каждый из беспилотных летательных аппаратов снабжен по меньшей мере одним источником питания, а указанная система дополнительно содержит лазерную установку, выполненную с возможностью излучения лазерного луча, при этом каждый из беспилотных летательных аппаратов снабжен приемником-преобразователем лазерного излучения, электрически соединенным с источником питания и выполненным с возможностью преобразования принятого лазерного луча в электрический ток с обеспечением возможности зарядки указанного источника питания.
47. Система по п. 46, в которой каждый из беспилотных летательных аппаратов дополнительно выполнен с возможностью выдачи в реальном времени данных о запасе хода на управляющее устройство, а управляющее устройство дополнительно выполнено с возможностью управления работой лазерной установки с обеспечением возможности направления лазерного луча на беспилотный летательный аппарат, запас хода которого ниже заданного порогового значения.
48. Система по п. 1, дополнительно содержащая летательную решетчатую конструкцию, выполненную с возможностью размещения на ней беспилотных летательных аппаратов, направленных управляющим устройством в указанную область пространства, с обеспечением формирования указанного составного дисплея.
49. Система по п. 48, в которой решетчатая летательная конструкция снабжена посадочными площадками, выполненными с возможностью размещения на них указанных направленных беспилотных летательных аппаратов.
50. Система по п. 48, в которой решетчатая летательная конструкция снабжена крепежными средствами, выполненными с возможностью взаимодействия с указанными направленными беспилотными летательными аппаратами.
51. Система по п. 48, в которой каждый из указанных направленных беспилотных летательных аппаратов снабжен крепежными средствами, выполненными с возможностью взаимодействия с решетчатой летательной конструкцией.
52. Система по п. 1, в которой беспилотные летательные аппараты, направленные в заданную область пространства, выполнены с возможностью механического соединения друг с другом при формировании составного дисплея.
53. Система по п. 1, в которой беспилотные летательные аппараты, направленные в заданную область пространства, снабжены крепежными средствами, обеспечивающими возможность взаимного разъемного соединения указанных беспилотных летательных аппаратов друг с другом при формировании составного дисплея.
54. Система по п. 53, в которой крепежные средства беспилотных летательных аппаратов выполнены с возможностью их развертывания, раскладывания или раздвижения для обеспечения взаимного разъемного соединения указанных беспилотных летательных аппаратов.
55. Система по п. 53, в которой крепежные средства беспилотных летательных аппаратов выполнены с возможностью их выдвижения из корпусов беспилотных летательных аппаратов для обеспечения взаимного разъемного соединения указанных беспилотных летательных аппаратов.
56. Система по п. 1, в которой каждый из беспилотных летательных аппаратов дополнительно снабжен по меньшей мере одним захватом и устройством фиксации изображений, выполненным с возможностью фиксации в реальном времени изображений в поле обзора с обеспечением возможности выявления по меньшей мере одного из направленных беспилотных летательных аппаратов в указанном поле обзора при нахождении в указанной области пространства, при этом каждый из указанных захватов соединен с возможностью обмена данными с устройством захвата изображений с обеспечением возможности осуществления захвата одного из выявленных беспилотных летательных аппаратов в ответ на данные о выявленных беспилотных летательных аппаратах от устройства фиксации изображений.
57. Система по п. 1, в которой по меньшей мере одна из указанных парковочных станций дополнительно снабжена по меньшей мере одним зарядным устройством, а управляющее устройство дополнительно выполнено с возможностью направления беспилотных летательных аппаратов, дисплеи которых формируют составной дисплей, на указанную по меньшей мере одну парковочную станцию с обеспечением возможности подключения каждого из указанных направленных беспилотных летательных аппаратов к одному из указанных зарядных устройств для восполнения его запаса хода.
58. Система по п. 57, в которой управляющее устройство выполнено с возможностью выдачи навигационных команд на беспилотные летательные аппараты, дисплеи которых формируют составной дисплей, для их направления на указанную по меньшей мере одну парковочную станцию по истечении заданного периода времени.
59. Система по п. 57, в которой управляющее устройство выполнено с возможностью по существу одновременной или последовательной выдачи навигационных команд на беспилотные летательные аппараты, дисплеи которых формируют составной дисплей, для их направления на указанную по меньшей мере одну парковочную станцию.
60. Система по п. 57, в которой управляющее устройство выполнено с возможностью выдачи навигационных команд на беспилотные летательные аппараты, дисплеи которых формируют составной дисплей, для их направления на указанную по меньшей мере одну парковочную станцию группами или друг за другом.
61. Система по любому из пп. 57-60, в которой управляющее устройство дополнительно выполнено с возможностью выдачи навигационных команд на заряженные беспилотные летательные аппараты с обеспечением возможности их возврата в свои первоначальные пространственные местоположения для повторного формирования указанного составного дисплея.
62. Система по п. 1, в которой по меньшей мере одна из указанных парковочных станций дополнительно снабжена по меньшей мере одним зарядным устройством, а беспилотные летательные аппараты, дисплеи которых формируют составной дисплей, выполнены с возможностью перемещения на указанную по меньшей мере одну парковочную станцию с обеспечением возможности подключения каждого из указанных направленных беспилотных летательных аппаратов к одному из указанных зарядных устройств для восполнения его запаса хода.
63. Система по п. 62, в которой беспилотные летательные аппараты, дисплеи которых формируют составной дисплей, выполнены с возможностью автоматического перемещения на указанную по меньшей мере одну парковочную станцию по истечении заданного периода времени.
64. Система по п. 62, в которой беспилотные летательные аппараты, дисплеи которых формируют составной дисплей, выполнены с возможностью автоматического перемещения на указанную по меньшей мере одну парковочную станцию по существу одновременно или последовательно.
65. Система по п. 62, в которой беспилотные летательные аппараты, дисплеи которых формируют составной дисплей, выполнены с возможностью автоматического перемещения на указанную по меньшей мере одну парковочную станцию группами или друг за другом.
66. Система по любому из пп. 62-65, в которой заряженные беспилотные летательные аппараты выполнены с возможностью автоматического возврата в свои первоначальные пространственные местоположения для повторного формирования указанного составного дисплея.
67. Система по п. 1, в которой каждый из указанных беспилотных летательных аппаратов снабжен по меньшей мере двумя дисплеями, размещенными на указанном беспилотном летательном аппарате таким образом, что они расположены под углом по отношению друг к другу, при этом при формировании составного дисплея указанные дисплеи образуют разные стороны составного дисплея.
68. Система по п. 12, в которой управляющее устройство обеспечивает возможность отображения одного и того же изображения со всех сторон указанного составного дисплея, отображения изображения по меньшей мере с одной из сторон указанного составного дисплея или отображения разных изображений на разных сторонах указанного составного дисплея.
69. Система по п. 1, в которой управляющее устройство дополнительно выполнено с возможностью выдачи навигационных команд на беспилотные летательные аппараты, дисплеи которых формируют составной дисплей, с обеспечением возможности перестроения этих беспилотных летательных аппаратов для разделения указанного составного дисплея по меньшей мере на две отдельные дисплейные части для визуализации изображения.
70. Система по п. 1, в которой управляющее устройство дополнительно обеспечивает возможность размещения указанных направленных беспилотных летательных аппаратов в заданных пространственных местоположениях в соответствии с заданной моделью построения беспилотных летательных аппаратов с обеспечением возможности формирования в воздухе по меньшей мере двух составных дисплеев.
71. Система по п. 70, в которой управляющее устройство дополнительно выполнено с возможностью выдачи навигационных команд на беспилотные летательные аппараты, дисплеи которых формируют указанные по меньшей мере два составных дисплея, с обеспечением возможности перестроения этих беспилотных летательных аппаратов для объединения указанных составных дисплеев по меньшей мере в одну единую дисплейную часть для визуализации изображения.
72. Система для визуализации изображения, содержащая:
одну или более парковочных станций,
беспилотные летательные аппараты, которые размещены в парковочных станциях и каждый из которых снабжен по меньшей мере двумя управляемыми источниками света, каждый из которых выполнен с возможностью излучения света с изменяемой длиной волны, и
управляющее устройство, соединенное с возможностью обмена данными с беспилотными летательными аппаратами и выполненное с возможностью направления по меньшей мере части из указанных беспилотных летательных аппаратов из парковочных станций в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с заданной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного дисплея из указанных источников света, при этом
каждый из источников света соответствует по меньшей мере одному пикселу указанного дисплея,
управляющее устройство выполнено с возможностью выдачи данных об изображении на беспилотные летательные аппараты с обеспечением возможности изменения длины волны излучения источников света указанных беспилотных летательных аппаратов для отображения указанного изображения на указанном сформированном дисплее, а
беспилотные летательные аппараты, источники света которых формируют указанный дисплей, образуют по меньшей мере одну подвижную цепочку беспилотных летательных аппаратов в составе указанного сформированного дисплея.
73. Система по п. 72, в которой каждый из указанных беспилотных летательных аппаратов содержит по меньшей мере три управляемых источника света, выполненных каждый с возможностью излучения света с изменяемой длиной волны.
74. Система по п. 72, в которой каждый из указанных управляемых источников света выполнен с возможностью излучения света белого цвета, света красного цвета, света зеленого цвета или света голубого цвета.
75. Система по п. 72, в которой управляемый источник света представляет собой многоцветный светодиодный модуль или группу из четырех источников света, выполненных с возможностью излучения света белого цвета, света красного цвета, света зеленого цвета или света голубого цвета или света, представляющего собой комбинацию двух или более из указанных цветов.
76. Система по п. 72, в которой управляющее устройство дополнительно выполнено с возможностью изменения длины волны, с которой излучают свет источники света, формирующие указанный дисплей, в реальном времени с обеспечением возможности отображения заданного статического или динамического изображения на указанном дисплее.
77. Система по п. 72, в которой указанные управляемые источники света размещены в каждом беспилотном летательном аппарате таким образом, что они излучают свет в противоположных направлениях, разных направлениях или одном и том же направлении.
78. Система по п. 73, в которой указанные управляемые источники света размещены в каждом беспилотном летательном аппарате таким образом, что они излучают свет в попарно противоположных направлениях, разных направлениях или в одном и том же направлении.
79. Система по п. 73, в которой указанные управляемые источники света размещены в каждом беспилотном летательном аппарате таким образом, что они излучают свет под заданными углами или каждый из них излучает свет в одном из следующих направлений: по направлению вверх, по направлению вниз, по направлению влево и по направлению вправо.
80. Система по п. 72, в которой каждый из указанных беспилотных летательных аппаратов имеет корпус, подсвечиваемый или освещаемый указанными по меньшей мере двумя управляемыми источниками света.
81. Система по п. 80, в которой корпус указанного беспилотного летательного аппарата имеет форму шара или представляет собой шарообразный каркас.
82. Система по п. 80, в которой корпус указанного беспилотного летательного аппарата имеет форму сфероида или представляет собой каркас в виде сфероида.
83. Система по п. 81 или 82, в которой в указанном каркасе беспилотного летательного аппарата установлен по меньшей мере один воздушный движитель.
84. Система по п. 81 или 82, в которой по меньшей мере одна из парковочных станций снабжена по меньшей мере одним хранилищем, выполненным с возможностью размещения в нем беспилотных летательных аппаратов с образованием стопы.
85. Система по п. 84, в которой указанное хранилище снабжено беспроводным зарядным устройством, выполненным с возможностью заряда беспилотных летательных аппаратов, размещенных в хранилище.
86. Система по п. 84, в которой указанное хранилище снабжено зарядным устройством, а указанные беспилотные летательные аппараты дополнительно выполнены с возможностью последовательного или параллельного электрического соединения друг с другом при размещении в хранилище с обеспечением возможности их подключения к указанному зарядному устройству для одновременного восполнения их запаса хода.
87. Система по п. 84, в которой указанное хранилище снабжено зарядными устройствами, а каждый из беспилотных летательных аппаратов выполнен с возможностью подключения к одному из зарядных устройств при размещении в хранилище с обеспечением возможности восполнения своего запаса хода.
88. Система по п. 87, в которой каждый из беспилотных летательных аппаратов дополнительно снабжен гироскопом, выполненным с возможностью определения пространственного положения беспилотного летательного аппарата, и выполнен с возможностью изменения своего пространственного положения в хранилище в зависимости от показаний гироскопа.
89. Система по п. 81 или 82, в которой указанный каркас снабжен оболочкой.
90. Система для визуализации изображения, содержащая:
одну или более парковочных станций,
беспилотные летательные аппараты, которые размещены в парковочных станциях и каждый из которых снабжен по меньшей мере одним экраном,
проекционное устройство и
управляющее устройство, соединенное с возможностью обмена данными с беспилотными летательными аппаратами и выполненное с возможностью направления по меньшей мере части из указанных беспилотных летательных аппаратов по меньшей мере из одной парковочной станции из указанных парковочных станций в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с заданной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного составного экрана из указанных экранов,
при этом управляющее устройство выполнено с возможностью выдачи данных об изображении на указанное проекционное устройство с обеспечением возможности проецирования указанного изображения на указанном составном экране, а
беспилотные летательные аппараты, экраны которых формируют указанный составной экран, образуют по меньшей мере одну подвижную цепочку беспилотных летательных аппаратов в составе указанного составного экрана.
91. Система для визуализации изображения, содержащая:
одну или более парковочных станций,
беспилотные летательные аппараты, которые размещены в парковочных станциях и каждый из которых имеет корпус или каркас,
проекционное устройство и
управляющее устройство, соединенное с возможностью обмена данными с беспилотными летательными аппаратами и выполненное с возможностью направления по меньшей мере части из указанных беспилотных летательных аппаратов по меньшей мере из одной парковочной станции из указанных парковочных станций в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с заданной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного экрана из указанных корпусов или каркасов беспилотных летательных аппаратов, при этом
управляющее устройство выполнено с возможностью выдачи данных об изображении на указанное проекционное устройство с обеспечением возможности проецирования указанного изображения на указанном сформированном экране, а
беспилотные летательные аппараты, корпус или каркасы которых формируют указанный экран, образуют по меньшей мере одну подвижную цепочку беспилотных летательных аппаратов в составе указанного сформированного экрана.
92. Система для визуализации изображения, содержащая:
одну или более парковочных станций,
беспилотные летательные аппараты, которые размещены в парковочных станциях и каждый из которых снабжен по меньшей мере одним источником белого света, выполненным с возможностью излучения света белого цвета, и по меньшей мере одним управляемым источником света, выполненным с возможностью излучения света с изменяемой длиной волны, и
управляющее устройство, соединенное с возможностью обмена данными с беспилотными летательными аппаратами и выполненное с возможностью направления по меньшей мере части из указанных беспилотных летательных аппаратов из парковочных станций в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с заданной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного дисплея из указанных источников света, при этом
каждый из источников света соответствует по меньшей мере одному пикселу указанного дисплея,
управляющее устройство выполнено с возможностью выдачи данных об изображении на беспилотные летательные аппараты с обеспечением возможности излучения света белого цвета указанными источниками белого света и возможности изменения длины волны излучения указанных управляемых источников света беспилотных летательных аппаратов для отображения указанного изображения на указанном сформированном дисплее, а
беспилотные летательные аппараты, источники света которых формируют указанный дисплей, образуют по меньшей мере одну подвижную цепочку беспилотных летательных аппаратов в составе указанного сформированного дисплея.
93. Система для визуализации изображения, содержащая:
одну или более парковочных станций,
беспилотные летательные аппараты, которые размещены в парковочных станциях и каждый из которых снабжен по меньшей мере одним экраном и проекционным устройством, и
управляющее устройство, соединенное с возможностью обмена данными с беспилотными летательными аппаратами и выполненное с возможностью направления по меньшей мере части из указанных беспилотных летательных аппаратов по меньшей мере из одной парковочной станции из указанных парковочных станций в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с заданной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного составного экрана из указанных экранов, при этом
управляющее устройство выполнено с возможностью выдачи данных об изображении на указанные проекционные устройства беспилотных летательных аппаратов с обеспечением возможности проецирования указанного изображения на указанном составном экране, а
беспилотные летательные аппараты, экраны которых формируют указанный составной экран, образуют по меньшей мере одну подвижную цепочку беспилотных летательных аппаратов в составе указанного составного экрана.
94. Система для визуализации изображения, содержащая:
одну или более парковочных станций,
беспилотные летательные аппараты, которые размещены в парковочных станциях, причем каждый из указанных беспилотных летательных аппаратов имеет корпус или каркас и снабжен проекционным устройством, и
управляющее устройство, соединенное с возможностью обмена данными с беспилотными летательными аппаратами и выполненное с возможностью направления по меньшей мере части из указанных беспилотных летательных аппаратов по меньшей мере из одной парковочной станции из указанных парковочных станций в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с заданной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного экрана из указанных корпусов или каркасов беспилотных летательных аппаратов, при этом
управляющее устройство выполнено с возможностью выдачи данных об изображении на указанные проекционные устройства беспилотных летательных аппаратов с обеспечением возможности проецирования указанного изображения на указанном сформированном экране, а
беспилотные летательные аппараты, корпус или каркасы которых формируют указанный экран, образуют по меньшей мере одну подвижную цепочку беспилотных летательных аппаратов в составе указанного сформированного экрана.
95. Способ визуализации изображения, включающий следующие этапы, согласно которым:
выдают навигационные команды и заданную модель построения беспилотных летательных аппаратов на беспилотные летательные аппараты, каждый из которых снабжен по меньшей мере одним дисплеем,
в ответ на указанные навигационные команды направляют указанные беспилотные летательные аппараты по меньшей мере из одной парковочной станции в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с указанной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного составного дисплея из указанных дисплеев,
выдают данные о статическом или динамическом изображении на беспилотные летательные аппараты с обеспечением возможности отображения указанного изображения на указанном составном дисплее и
выдают навигационные команды на указанные беспилотные летательные аппараты, дисплеи которых формируют указанный составной дисплей, с обеспечением возможности их перемещения в составе указанного составного дисплея с образованием по меньшей мере одной подвижной цепочки беспилотных летательных аппаратов.
96. Способ по п. 95, согласно которому дополнительно
принимают, посредством управляющего устройства, данные о запасе хода от каждого из беспилотных летательных аппаратов, дисплеи которых формируют составной дисплей,
выявляют, посредством управляющего устройства, каждый разряженный беспилотный летательный аппарат, запас хода которого меньше порогового значения, среди указанных беспилотных летательных аппаратов на основании указанных данных о запасе хода, и
направляют, посредством управляющего устройства, заряженный беспилотный летательный аппарат из парковочной станции для замены указанного разряженного беспилотного летательного аппарата.
97. Способ по п. 96, согласно которому дополнительно направляют указанный разряженный беспилотный летательный аппарат на парковочную станцию с обеспечением возможности восполнения его запаса хода.
98. Способ по п. 97, согласно которому дополнительно направляют беспилотный летательный аппарат с восполненным запасом хода в заданную область пространства с обеспечением возможности замены одного из разряженных беспилотных летательных аппаратов, дисплеи которых формируют составной дисплей.
99. Способ по п. 95, согласно которому выдают, посредством управляющего устройства, навигационные команды на беспилотные летательные аппараты, дисплеи которых формируют составной дисплей, с обеспечением возможности перестроения этих беспилотных летательных аппаратов для изменения формы и/или размера составного дисплея.
100. Способ по п. 95, согласно которому выдают, посредством управляющего устройства, навигационные команды на беспилотные летательные аппараты, дисплеи которых формируют составной дисплей, с обеспечением возможности перестроения этих беспилотных летательных аппаратов для разделения указанного составного дисплея по меньшей мере на две отдельные дисплейные части для визуализации изображения.
101. Способ по п. 95, согласно которому указанные направленные беспилотные летательные аппараты при размещении в заданных пространственных местоположениях в соответствии с заданной моделью построения беспилотных летательных аппаратов формируют в воздухе по меньшей мере два составных дисплея.
102. Способ по п. 101, согласно которому дополнительно выдают, посредством управляющего устройства, навигационные команды на беспилотные летательные аппараты, дисплеи которых формируют составной дисплей, с обеспечением возможности перестроения этих беспилотных летательных аппаратов для объединения указанных составных дисплеев по меньшей мере в одну единую дисплейную часть для визуализации изображения.
103. Способ визуализации изображения, включающий следующие этапы, согласно которым:
выдают навигационные команды и заданную модель построения беспилотных летательных аппаратов на беспилотные летательные аппараты, каждый из которых снабжен по меньшей мере двумя управляемыми источниками света, каждый из которых выполнен с возможностью излучения света с изменяемой длиной волны,
в ответ на указанные навигационные команды направляют указанные беспилотные летательные аппараты по меньшей мере из одной парковочной станции в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с указанной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного дисплея из указанных источников света, каждый из которых соответствует по меньшей мере одному пикселу указанного дисплея,
выдают данные о статическом или динамическом изображении на беспилотные летательные аппараты с обеспечением возможности изменения длины волны излучения источников света указанных беспилотных летательных аппаратов для отображения указанного изображения на указанном сформированном дисплее и
выдают навигационные команды на указанные беспилотные летательные аппараты, источники света которых формируют указанный дисплей, с обеспечением возможности их перемещения в составе указанного сформированного дисплея с образованием по меньшей мере одной подвижной цепочки беспилотных летательных аппаратов.
104. Способ визуализации изображения, включающий следующие этапы, согласно которым:
выдают навигационные команды и заданную модель построения беспилотных летательных аппаратов на беспилотные летательные аппараты, каждый из которых снабжен по меньшей мере одним источником белого света, выполненным с возможностью излучения света белого цвета, и по меньшей мере одним управляемым источником света, выполненным с возможностью излучения света с изменяемой длиной волны,
в ответ на указанные навигационные команды направляют указанные беспилотные летательные аппараты по меньшей мере из одной парковочной станции в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с указанной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного дисплея из указанных источников света, каждый из которых соответствует по меньшей мере одному пикселу указанного дисплея,
выдают данные о статическом или динамическом изображении на беспилотные летательные аппараты с обеспечением возможности излучения света белого цвета указанным источником белого света и возможности изменения длины волны излучения указанных управляемых источников света беспилотных летательных аппаратов для отображения указанного изображения на указанном сформированном дисплее и
выдают навигационные команды на указанные беспилотные летательные аппараты, источники света которых формируют указанный дисплей, с обеспечением возможности их перемещения в составе указанного сформированного дисплея с образованием по меньшей мере одной подвижной цепочки беспилотных летательных аппаратов.
105. Беспилотный летательный аппарат, содержащий:
корпус, который выполнен с обеспечением возможности размещения указанного беспилотного летательного аппарата в парковочной станции и в котором установлен по меньшей мере один воздушный движитель, обеспечивающий возможность перемещения беспилотного летательного аппарата по воздуху,
по меньшей мере два управляемых источника света, которые установлены в корпусе и каждый из которых выполнен с возможностью излучения света с изменяемой длиной волны с обеспечением возможности подсвечивания или освещения указанного корпуса, и
модуль управления, функционально соединенный с указанными источниками света с обеспечением возможности изменения длины волны излучения указанных источников света для отображения по меньшей мере части статического или динамического изображения посредством указанных источников света, при этом
модуль управления выполнен с возможностью приема навигационных команд с обеспечением возможности перемещения указанного беспилотного летательного аппарата в составе подвижной цепочки беспилотных летательных аппаратов.
106. Беспилотный летательный аппарат по п. 105, в котором корпус имеет форму сферы.
107. Беспилотный летательный аппарат по п. 105, в котором корпус представляет собой шарообразный каркас.
108. Беспилотный летательный аппарат по п. 106 или 107, в котором указанный каркас снабжен оболочкой.
109. Беспилотный летательный аппарат по п. 108, в котором оболочка соединена с каркасом с возможностью вращения по отношению к нему и возможностью ее освещения или подсвечивания указанными управляемыми источниками света.
110. Способ визуализации изображения, включающий следующие этапы, согласно которым:
выдают навигационные команды и заданную модель построения беспилотных летательных аппаратов на беспилотные летательные аппараты, каждый из которых снабжен по меньшей мере одним экраном,
в ответ на указанные навигационные команды направляют указанные беспилотные летательные аппараты по меньшей мере из одной парковочной станции в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с указанной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного составного экрана из указанных экранов,
выдают данные о статическом или динамическом изображении на проекционное устройство с обеспечением возможности проецирования указанного изображения на указанном составном экране и
выдают навигационные команды на указанные беспилотные летательные аппараты, экраны которых формируют указанный составной экран, с обеспечением возможности их перемещения в составе указанного составного экрана с образованием по меньшей мере одной подвижной цепочки беспилотных летательных аппаратов.
111. Способ визуализации изображения, включающий следующие этапы, согласно которым:
выдают навигационные команды и заданную модель построения беспилотных летательных аппаратов на беспилотные летательные аппараты, каждый из которых снабжен корпусом или каркасом,
в ответ на указанные навигационные команды направляют указанные беспилотные летательные аппараты по меньшей мере из одной парковочной станции в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с указанной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного экрана из указанных корпусов или каркасов,
выдают данные о статическом или динамическом изображении на проекционное устройство с обеспечением возможности проецирования указанного изображения на указанном экране и
выдают навигационные команды на указанные беспилотные летательные аппараты, корпуса или каркасы которых формируют указанный экран, с обеспечением возможности их перемещения в составе указанного сформированного экрана с образованием по меньшей мере одной подвижной цепочки беспилотных летательных аппаратов.
112. Способ визуализации изображения, включающий следующие этапы, согласно которым:
выдают навигационные команды и заданную модель построения беспилотных летательных аппаратов на беспилотные летательные аппараты, каждый из которых снабжен по меньшей мере одним источником белого света, выполненным с возможностью излучения света белого цвета, и по меньшей мере одним управляемым источником света, выполненным с возможностью излучения света с изменяемой длиной волны,
в ответ на указанные навигационные команды направляют указанные беспилотные летательные аппараты по меньшей мере из одной парковочной станции в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с указанной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного дисплея из указанных источников света,
выдают данные о статическом или динамическом изображении на указанные беспилотные летательные аппараты с обеспечением возможности излучения света белого цвета указанными источниками белого света и возможности изменения длины волны излучения указанных управляемых источников света беспилотных летательных аппаратов для отображения указанного изображения на указанном дисплее и
выдают навигационные команды на указанные беспилотные летательные аппараты, источники света которых формируют указанный дисплей, с обеспечением возможности их перемещения в составе указанного сформированного дисплея с образованием по меньшей мере одной подвижной цепочки беспилотных летательных аппаратов.
113. Способ визуализации изображения, включающий следующие этапы, согласно которым:
выдают навигационные команды и заданную модель построения беспилотных летательных аппаратов на беспилотные летательные аппараты, каждый из которых снабжен по меньшей мере одним экраном и проекционным устройством,
в ответ на указанные навигационные команды направляют указанные беспилотные летательные аппараты по меньшей мере из одной парковочной станции в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с указанной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного составного экрана из указанных экранов,
выдают данные о статическом или динамическом изображении на проекционные устройства беспилотных летательных аппаратов с обеспечением возможности проецирования указанного изображения на указанном составном экране и
выдают навигационные команды на указанные беспилотные летательные аппараты, экраны которых формируют указанный составной экран, с обеспечением возможности их перемещения в составе указанного составного экрана с образованием по меньшей мере одной подвижной цепочки беспилотных летательных аппаратов.
114. Способ визуализации изображения, включающий следующие этапы, согласно которым:
выдают навигационные команды и заданную модель построения беспилотных летательных аппаратов на беспилотные летательные аппараты, каждый из которых снабжен корпусом или каркасом и проекционным устройством,
в ответ на указанные навигационные команды направляют указанные беспилотные летательные аппараты по меньшей мере из одной парковочной станции в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных беспилотных летательных аппаратов в заданном пространственном местоположении в соответствии с указанной моделью построения беспилотных летательных аппаратов для формирования в воздухе по меньшей мере одного экрана из указанных корпусов или каркасов беспилотных летательных аппаратов,
выдают данные о статическом или динамическом изображении на проекционные устройства беспилотных летательных аппаратов с обеспечением возможности проецирования указанного изображения на указанном экране и
выдают навигационные команды на указанные беспилотные летательные аппараты, корпуса или каркасы которых формируют указанный экран, с обеспечением возможности их перемещения в составе указанного сформированного экрана с образованием по меньшей мере одной подвижной цепочки беспилотных летательных аппаратов.
| US 10303415 B1, 28.05.2019 | |||
| US 2021148131 A1, 20.05.2021 | |||
| US 20140236388 A1, 21.08.2014 | |||
| US 2017240296 A1, 24.08.2017 | |||
| US 10370101 B2, 06.08.2019 | |||
| US 10338610 B2, 02.07.2019. |

