ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к средствам и способам для автоматического формирования сборно-разборных трехмерных объектов в пространстве, а именно к системе и способу для формирования трехмерного объекта, основанных на использовании управляемых самоходных модулей, а также к самоходному модулю для формирования трехмерного объекта, который может быть использован в таких системе и способе.
УРОВЕНЬ ТЕХНИКИ
В настоящее время для автоматизированного формирования трехмерных объектов широко применяются методы и устройства для 3D-печати, обеспечивающие возможность формирования различных изделий, деталей, моделей зданий и сооружений, и иных трехмерных объектов т.д. Несмотря на приемлемую скорость и качество формирования трехмерных объектов, у существующих методов 3D печати есть существенный недостаток, заключающийся к неразборности создаваемых трехмерных моделей. Следствием данного недостатка является повышенный расход материала, необходимость утилизации отходов моделирования и т.д.
Следовательно, разработка способов и систем для автоматизированного формирования трехмерных объектов с возможностью их многократной сборки и разборки является актуальной задачей.
Также широко распространены различные самоходные модули с различными конструкциями и движителями, которые выполнены с возможностью автоматического перемещения и навигации в пространстве, в том числе с размещением в заданных координатах пространства. В частности, известны самоходные модули в виде беспилотных летательных аппаратов различных конструкций, самоходных дронов на колесном, гусеничном ходу, подводных или надводных дронов, представляющих собой беспилотные лодки или подводные лодки и т.д. мультикоптеров. Упомянутые самоходные модули способны нести свои корпуса или корпусные части и способны перемещаться или находиться в заданной области пространства.
Например, в патенте США №10303415 (далее US 10303415), опубликованном 28 мая 2019 года, описана система для формирования трехмерного объекта в виде составного дисплея, в состав которой входят самоходные модули в виде воздушных летательных аппаратов, снабженные каждый корпусом с дисплеем и движителями, и управляющее устройство, соединенное проводным или беспроводным образом с возможностью обмена данными с указанными самоходными модулями и выполненное с возможностью направления указанных самоходных модулей в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных самоходных модулей в заданном пространственном местоположении для формирования трехмерного объекта в виде составного дисплея из дисплеев указанных самоходных модулей. Следует отметить, что в системе для формирования трехмерного объекта, раскрытой в US 10303415, модули находятся в воздухе и не могут образовывать статический трехмерный объект, что влияет на точность позиционирования и точность формирования трехмерной модели, которая существенно уступает точности моделей, создаваемых методами 3-D печати, еще одним недостатком является повышенный расход заряда аккумуляторных батарей, что также делает невозможным сохранение формы сформированного трехмерно объекта.
Таким образом, основной недостаток известной системы для формирования трехмерного объекта, раскрытой в US 10303415, заключается в повышенной сложности и длительности формирования трехмерного объекта и его поддержания в надлежащем состоянии в заданной области пространства, в которой он сформирован.
Таким образом, очевидна потребность в дальнейшем совершенствовании известных систем, способов и самоходных модулей для формирования трехмерного объекта, в частности для снижения сложности и длительности формирования трехмерного объекта, а также снижения сложности и длительности поддержания сформированного трехмерного объекта в надлежащем состоянии в заданной области пространства.
Следовательно, техническая проблема, решаемая настоящим изобретением, состоит в создании системы, способа и самоходного модуля для формирования трехмерного объекта, в каждом из которых по меньшей мере частично устранен хотя бы один из обозначенных выше недостатков известной системы для формирования трехмерного объекта, заключающихся повышенной сложности и длительности формирования трехмерного объекта в заданной области пространства, в которой он должен быть сформирован, и повышенной сложности и длительности поддержания сформированного трехмерного объекта в надлежащем состоянии в указанной области пространства.
РАСКРЫТИЕ
Задача настоящего изобретения состоит в создании системы, способа и самоходного модуля для формирования трехмерного объекта, решающих каждый по меньшей мере одну из обозначенных выше проблем известного уровня техники, а также в расширении арсенала средств для формирования трехмерного объекта.
Поставленная задача решена в первом аспекте настоящего изобретения благодаря тому, что в предложенной системе для формирования трехмерного объекта, содержащей: (i) одну или более парковочных станций; и (ii) самоходные модули, каждый из которых снабжен корпусом; (а) указанные самоходные модули размещены в парковочных станциях; а (b) указанная система также содержит управляющее устройство, соединенное с возможностью обмена данными с самоходными модулями и выполненное с возможностью направления по меньшей мере части из указанных самоходных модулей по меньшей мере из одной парковочной станции из указанных парковочных станций в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных самоходных модулей в заданном пространственном местоположении в соответствии с заданной моделью трехмерного объекта для формирования по меньшей мере одного трехмерного объекта из корпусов указанных размещенных самоходных модулей.
Кроме того, поставленная задача решена во втором аспекте настоящего изобретения благодаря тому, что в предложенном способе формирования трехмерного объекта, включающем этап, согласно которому: (i) выдают навигационные команды и заданную модель трехмерного объекта на самоходные модули, каждый из которых имеет корпус; (а) в ответ на указанные навигационные команды дополнительно направляют указанные самоходные модули по меньшей мере из одной парковочной станции в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных самоходных модулей в заданном пространственном местоположении в соответствии с заданной моделью трехмерного объекта для формирования по меньшей мере одного трехмерного объекта из корпусов указанных размещенных самоходных модулей.
Кроме того, поставленная задача решена в третьем аспекте настоящего изобретения благодаря тому, что в предложенном самоходном модуле для формирования трехмерного объекта, содержащем: (i) корпус, снабженный одним или более движителями, обеспечивающим возможность перемещения самоходного модуля; (а) указанный корпус дополнительно выполнен с обеспечением возможности размещения указанного самоходного модуля в парковочной станции, а (b) указанный самоходный модуль также содержит блок управления, выполненный с возможностью приема навигационных команд от внешнего управляющего устройства с обеспечением возможности перемещения указанного самоходного модуля из парковочной станции в заданную область пространства с использованием по меньшей мере одного из указанных движителей и с возможностью обеспечения размещения указанного самоходного модуля в заданном пространственном местоположении для формирования по меньшей мере части заданного трехмерного объекта.
Система для формирования трехмерного объекта согласно первому аспекту настоящего изобретения, способ формирования трехмерного объекта согласно второму аспекту настоящего изобретения и самоходный модуль для формирования трехмерного объекта согласно третьему аспекту настоящего изобретения обеспечивают каждый технический результат, заключающийся в ускорении процесса формирования трехмерного объекта в заданной области пространства, в которой он должен быть сформирован, и упрощении процесса поддержания сформированного трехмерного объекта в указанной области пространства. Вышеуказанные технические преимущества заявляемого технического решения не являются ограничивающими. Дополнительные преимущества технического решения и отдельных вариантов его осуществления будут ясны специалисту из представленного далее подробного описания и прилагаемых чертежей.
Кроме того, система для формирования трехмерного объекта согласно первому аспекту настоящего изобретения, способ формирования трехмерного объекта согласно второму аспекту настоящего изобретения и самоходный модуль для формирования трехмерного объекта согласно третьему аспекту настоящего изобретения обеспечивают каждый дополнительный технический результат, заключающийся расширении арсенала средств для формирования трехмерного объекта.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прилагаемые чертежи, которые приведены для обеспечения лучшего понимания сущности настоящего изобретения, составляют часть настоящего документа и включены в него для иллюстрации нижеописанных вариантов реализации и аспектов настоящего изобретения. Прилагаемые чертежи в сочетании с приведенным ниже описанием служат для пояснения сущности настоящего изобретения.
На чертежах:
на фиг. 1 схематично показан первый иллюстративный вариант реализации системы для формирования трехмерного объекта согласно настоящему изобретению;
на фиг. 2 показан второй иллюстративный вариант реализации системы для формирования трехмерного объекта согласно настоящему изобретению;
на фиг. 3 показаны иные варианты реализации самоходного модуля, используемого в составе системы для формирования трехмерного объекта, показанной на фиг. 1 или фиг. 2;
на фиг. 4 схематично показан один из примеров гибридного варианта реализации самоходного модуля, используемого в составе системы для формирования трехмерного объекта, показанной на фиг. 1 или фиг. 2;
на фиг. 5 показан третий иллюстративный вариант реализации системы для формирования трехмерного объекта согласно настоящему изобретению;
на фиг. 6 показано изображение, иллюстрирующее возможности преобразования одного трехмерного объекта, сформированного с использованием системы для формирования трехмерного объекта, показанной на фиг. 1 или фиг. 2, в иные трехмерные объекты;
на фиг. 7 показана блок-схема способа формирования трехмерного объекта, реализуемого с использованием системы для формирования трехмерного объекта, показанной на фиг. 1 или фиг. 2.
ОСУЩЕСТВЛЕНИЕ
Ниже со ссылкой на прилагаемые чертежи описаны некоторые примеры возможных вариантов реализации настоящего изобретения, при этом не следует считать, что приведенное ниже описание определяет или ограничивает объем настоящего изобретения.
В приведенном ниже описании хорошо известные функции или конструкции не описаны подробно, поскольку это может завуалировать неважными сведениями сущность настоящего изобретения.
Следует понимать, что в приведенном далее описании термины, такие как «первый», «второй», «верхний», «нижний», «боковой», «передний», «задний» и т.п., использованы исключительно для удобства, при этом их не следует толковать как ограничительные термины. В частности, в контексте настоящего изобретения, если в описании настоящего документа явно не указано иное, термины «первый», «второй», «третий» или т.п. использованы для того, чтобы отличать друг от друга элементы, компоненты, части, узлы, модули, блоки, варианты реализации или т.п., к которым они относятся, а не для целей описания какой-либо конкретной взаимосвязи между ними. Так, например, следует иметь в виду, что использование терминов «первая группа» самоходных модулей и «вторая группа» самоходных модулей не подразумевает какого-либо порядка, отнесения к определенному типу, хронологии, иерархии или ранжирования групп самоходных модулей во множестве самоходных модулей, равно как и их использование (само по себе) не исключает, что дополнительно могут существовать «третья группа» самоходных модулей, «четвертая группа» самоходных модулей и т.п. В дальнейшем, как указано здесь в других контекстах, упоминание «первой группы» и «второй группы» в настоящем документе не исключает возможности того, что в состав этих групп входят одинаковые элементы. Так, например, в некоторых случаях самоходные модули в «первой группе» самоходных модулей и «второй группе» самоходных модулей могут совпадать по конструкции, а в других случаях могут и отличаться по конструкции.
Следует понимать при упоминании объекта в единственном числе возможно и наличие множества таких объектов и наоборот, если явно не указано иное или иное явным образом не следует из контекста настоящего документа.
Грамматические связи выражают любые или все альтернативные и объединенные сочетания связанных пунктов, предложений, слов и т.п., если только явно не указано иное или иное явным образом не следует из контекста. Таким образом следует понимать, что термин «или» в целом означает «и/или» и т.п.
Перечисление диапазонов значений в данном документе не является ограничением, поскольку ссылается в индивидуальном порядке на любые или все значения, попадающие в диапазон, если иное не указано в данном документе, при этом каждое отдельное значение в таком диапазоне включено в описание так, как если бы оно было отдельно приведено в данном документе.
Слова «приблизительно», «примерно» или т.п. в сочетании с числовым значением следует толковать как указывающие на возможное отклонение, которое по мнению специалиста в области техники обеспечивало бы надлежащее функционирование для решения необходимой задачи. Диапазоны значений и/или числовые значения приведены в данном документе исключительно в качестве примеров и не ограничивают объем описанных вариантов реализации.
Все примеры, приведенные в данном документе, или по меньшей мере часть из них, равно как и соответствующие слововыражения («например», «такой как», «в частности» или т.п.), по существу использованы для улучшения понимания сущности настоящего изобретения и для обеспечения полноты раскрытия настоящего изобретения, однако эти слововыражения не накладывают каких-либо ограничений на варианты реализации настоящего изобретения, для описания которых они использованы в настоящем документе, в частности не ограничивают практические варианты реализации элементов, компонентов, частей, узлов, модулей, блоков, устройств, средств и/или т.п., используемых для раскрытия особенностей конструкции и функционирования настоящего изобретения.
Термины и определения, примененные в описании данного документа
Термин «иллюстративный» означает неограничивающий пример, вариант или иллюстрацию. Аналогичным образом, термины «например» и «в качестве примера», использованные в данном документе, задают перечни из одного или более неограничивающих примеров, вариантов или иллюстраций. Как использовано в данном документе, схема «выполнена с возможностью» осуществлять функцию во всех случаях, когда эта схема содержит необходимые аппаратные средства и код (если какой-либо код необходим) для осуществления функции независимо от того, является ли исполнение этой функции заблокированным или запрещенным (например, посредством заданной оператором настройки, заводской настройки и т.п.).
В контексте настоящего изобретения термин «соответствие» и его производные (т.е. прилагательное, глагол, наречие) не обязательно означает точную согласованность или точное равенство в чем-либо, чему-либо или между чем-либо в каком-либо отношении, а может подразумевать отхождение или отклонение от указанного равенства в заданных пределах. Например, термин «соответствующие координаты», если из описания настоящего документа явно не следует иное, означает не только, что эти координаты могут быть точно равны друг другу или могут точно совпадать, но и подразумевает, что указанное равенство или совпадение координат может быть установлено с некоторой погрешностью (например, с погрешностью работы GPS-системы) или в рамках заданной географической области, окружающей точную географическую точку или область, на которую указывают эти координаты, или точное географическое место, на которое указывают эти координаты.
В контексте настоящего изобретения термин «самоходный модуль», если из описания настоящего документа явно не следует иное, относится к самостоятельному аппарату или устройству, собранному конструктивно из типовых (имеющихся на рынке) деталей, элементов, блоков, узлов, устройств и/или т.п. и способному передвигаться на собственной тяге по воздуху, по суше (земле), по воде, под водой и/или по поверхности стационарного или подвижного физического объекта, находящегося по меньшей мере в одном из воздушного пространства, наземного пространства, надводного пространства и подводного пространства.
В контексте настоящего изобретения термин «беспилотный летательный аппарат» (БПЛА), если из описания настоящего документа явно не следует иное, относится к беспилотному воздушному транспортному средству, которое выполнено с возможностью полета или которое способно осуществлять перемещение по воздуху в автоматическом режиме, т.е. без участия человека или внешних источников управления, или способно осуществлять перемещение по воздуху в полуавтоматическом режиме, т.е. получать по меньшей мере часть управляющих команд от человека (например, пилота, оператора или т.п.) или внешнего источника (например, пульта управления, сервера управления, управляющего устройства или т.п.) по заданным каналам связи. Неограничивающими примерами БПЛА являются различные мультироторные БПЛА (например, мультикоптерные дроны), однороторные БПЛА (например, беспилотный вертолет), гибридные БПЛА (например, дроны с роторами и крыльями) и т.п.
В контексте настоящего изобретения термин «корпус», если из описания настоящего документа явно не следует иное, относится к каркасу, остову, оболочке или несущей опоре самоходного модуля, каждый из которых может быть образован из одиночного опорного элемента или совокупности соединенных между собой опорных элементов, при этом тип, форма, габаритные размеры, конструктивные особенности и/или материал такого корпуса никак конкретно не ограничены.
В контексте настоящего изобретения термин «модуль», если из описания настоящего документа явно не следует иное, относится к функциональному элементу или совокупности функциональных элементов устройства в виде детали, узла, блока или др. сборочной единицы, которая выполняет определенные технические функции, обеспечивающие выполнение функций устройства. Модуль в целом может быть реализован на практике с использованием сочетания известных конструктивных элементов, сочетания известных конструктивных элементов и известных аппаратных средств, сочетания известных конструктивных элементов и известных программно-аппаратных средств или сочетания известных аппаратных средств и известных программных средств. Так, например, блок управления может быть реализован с использованием программно-аппаратных средств. В контексте настоящего изобретения блок управления может представлять собой физическое устройство, аппарат или множеством модулей, выполненных с использованием аппаратного обеспечения, например, с помощью, интегральной схемы специального назначения (ASIC) или программируемой логической интегральной схемы (FPGA), или же комбинации аппаратного и программного обеспечения, например, с помощью микропроцессорной системы и набора инструкций, реализующих функциональные возможности блока управления, которые (при выполнении) трансформируют микропроцессорную систему в устройство или систему специального назначения (например, автопилот). Кроме того, каждый из модулей или по меньшей мере один из них также может быть реализован в виде комбинации аппаратного и программного обеспечения, при этом одни функциональные возможности, описанные в настоящем документе в отношении одного из модулей, могут быть реализованы только за счет аппаратного обеспечения, а другие функциональные возможности, описанные в настоящем документе в отношении того же самого модуля или иного модуля, могут быть реализованы путем использования аппаратного обеспечения в сочетании с программным обеспечением.
В контексте настоящего изобретения термин «навигационная команда», если из описания настоящего документа явно не следует иное, относится к инструкции, направляемой самоходным модулям, входящим в состав системы для формирования трехмерного объекта. Навигационные команды могут быть выданы или обеспечены системой управления перемещением самоходного модуля в виде цифровых или аналоговых данных, инструкций или управляющих сигналов. Навигационные команды могут быть первоначально сгенерированы, без ограничения, автооператором, оператором (как локально, так и удаленно) и/или системой обхода препятствий. Навигационные команды могут быть сообщены, например, блоку управления для управления самоходным модулем или системе управления направлением перемещения самоходного модуля.
В контексте настоящего изобретения термин «ручное управление», если из описания настоящего документа явно не следует иное, относится не только к управлению исключительно с помощью рук человека, но и с помощью ног, пальцев, голоса, зрачков человека или их любого подходящего сочетания. Таким образом, в контексте настоящего изобретения термин «орган ручного управления» относится по меньшей мере к одному из следующего: кнопки, рычаги, джойстики, тумблеры, педали, сенсорный экран, сенсоры для управления жестами, сканеры для отслеживания движения зрачков, микрофон и/или т.п.
В контексте настоящего изобретения термин «зарядное устройство», если из описания настоящего документа явно не следует иное, относится к устройству для восполнения запаса хода самоходного модуля путем подзарядки его аккумуляторной батареи и/или путем восполнения его запаса топлива.
В контексте настоящего изобретения термин «база данных», если из описания настоящего документа явно не следует иное, подразумевает под собой любой структурированный набор данных, не зависящий от конкретной структуры, программного обеспечения по управлению базой данных, аппаратного обеспечения компьютера, на котором данные хранятся, используются или иным образом оказываются доступны для использования. База данных может находиться на том же оборудовании, выполняющем процесс, который сохраняет или использует информацию, хранящуюся в базе данных, или же она может находиться на отдельном оборудовании, например, выделенном сервере или на множестве серверов.
В контексте настоящего изобретения термин «стыковочное место», если из описания настоящего документа явно не следует иное, означает участок поверхности корпуса самоходного модуля или иной конструктивной части самоходного модуля, на котором указанный самоходный модуль входит сцепление, соединяется или взаимодействует с другим самоходным модулем или любой иной конструкцией, состыковываемой с указанным самоходным модулем.
В контексте настоящего изобретения термин «парковочная станция», если из описания настоящего документа явно не следует иное, означает неподвижную или подвижную конструкцию, приспособленную для размещения, хранения и/или восполнения запаса хода (например, подзарядки) в ней самоходных модулей.
В контексте настоящего изобретения термин «управляющее устройство» относится к вычислительному оборудованию, исполняющему компьютерную программу для обеспечения возможности получения запросов (например, от других вычислительных устройств) по сети связи, возможности выполнения или обработки таких запросов и/или возможности отправки таких запросов по сети связи (например, на другие вычислительные устройства). Вычислительное оборудование, исполняющее компьютерную программу, может представлять собой, без ограничения, один физический компьютер или одну физическую компьютерную систему. В контексте настоящего изобретения использование термина «управляющее устройство» не означает, что каждая вычислительная задача (например, полученные инструкции или команды) или любая иная конкретная задача будут получены, выполнены или послужат причиной выполнения одним и тем же управляющим устройством (т.е. одним и тем же программным и/или аппаратным обеспечением), что означает, что любое количество элементов программного обеспечения или аппаратного обеспечения может быть вовлечено в получение/отправку, выполнение или может послужить причиной для выполнения любой задачи или запроса, или последствий любой задачи или запроса, при этом все это программное и аппаратное обеспечение может быть реализовано в виде одного или нескольких управляющих устройств.
Система для формирования трехмерного объекта
На фиг. 1 схематично показан обобщенный вариант реализации системы 500-1 для формирования трехмерного объекта согласно настоящему изобретению, при этом описание частных или альтернативных вариантов реализации, описанных ниже в отношении системы 500-2 для формирования трехмерного объекта согласно настоящему изобретению, показанной на фиг. 2, следует считать относящимся и к системе 500-1.
В частности, система 500-1 обеспечивает возможность формирования на поверхности стола статического трехмерного объекта 300 в виде чашки с блюдцем, соответствующего одной из заданных моделей трехмерного объекта, выбранной пользователем с использованием стандартных средств ввода-вывода пользовательского устройства среди доступных моделей трехмерных объектов, отображенных на дисплее этого пользовательского устройства, при этом пользовательское устройство может дополнительно входить в состав системы 500-1.
Как показано на фиг. 1, система 500-1 содержит самоходные модули 200, каждый из которых снабжен корпусом 210 и двумя воздушными движителями 220 и которые первоначально размещены по меньшей мере в одной из парковочных станций (не показаны), также входящих в состав системы 500-1, и дополнительно содержит опорный (референтный) самоходный модуль 200-R, который снабжен шарообразным корпусом 210 и двумя воздушными движителями 220, установленными внутри шарообразного корпуса 210, и который по сути задает опорное (референтное) пространственное местоположение для формирования трехмерного объекта 300 в виде чашки с блюдцем. Кроме того, опорный самоходный модуль 200-R дополнительно содержит блок управления (не показан), выполненный с возможностью установления связи с пользовательским устройством с обеспечением возможности взаимного обмена данными. Следует отметить, что опорный самоходный модуль 200-R может быть первоначально размещен в одной из парковочных станций (не показаны) аналогично самоходным модулям 200, используемым для формирования трехмерного объекта 300, или может находиться в любом другом месте или любой другой области пространства, в которой между опорным самоходным модулем 200-R и пользовательским устройством (не показано) может быть установлена связь с возможностью взаимного обмена данными.
Для задания опорного (референтного) местоположения пользователь выбирает, посредством стандартных средств ввода-вывода своего пользовательского устройства, на трехмерной карте помещения, отображаемой на дисплее этого пользовательского устройства и иллюстрирующей трехмерное изображение помещения с находящимися в нем объектами, стол, на поверхности которого должен быть сформирован трехмерный объект 300 в виде чашки с блюдцем, соответствующий ранее выбранной пользователем модели трехмерного объекта. В ответ данные о выбранном пользователем месте формирования трехмерного объекта (т.е. поверхность стола в качестве иллюстративного примера), выдаваемые пользовательским устройством (не показано) на блок управления опорного (референтного) самоходного модуля 200-R, блок управления этого опорного (референтного) самоходного модуля 200-R включает или приводит в действие движители 220 опорного самоходного модуля 200-R с обеспечением перемещения по воздуху (полета) указанного опорного самоходного модуля 200-R в сторону указанного стола и его последующего приземления на поверхность этого стола. После приземления опорного (референтного) самоходного модуля 200-R на поверхность стола блок управления опорного самоходного модуля 200-R выключает движители 220 и выдает данные об опорном местоположении, заданном опорным самоходным модулем 200-R и соответствующем выбранному пользователем месту формирования трехмерного объекта, на самоходные модули 200 в парковочных станциях системы 500-1. В ответ на данные об опорном местоположении для формирования трехмерного объекта, самоходные модули 200 направляются из парковочных станций системы 500-1 под управлением своих блоков управления или под управления блока управления опорного самоходного модуля 200-R в заданную область пространства, соответствующую указанному опорному местоположению, в количестве, соответствующем ранее выбранной пользователем модели трехмерного объекта, с обеспечением последовательного или одновременного размещения указанных направленных самоходных модулей 200 в заданных пространственных местоположениях с привязкой к опорному самоходному модулю 200-R. Таким образом, пространственное местоположение каждого из самоходных модулей 200, используемых для формирования трехмерного объекта 300, задано через величину пространственного смещения (т.е. смещение по меньшей мере по одной из трех координатных осей) по отношению к опорному местоположению, занятому опорным самоходным модулем 200-R, а опорный самоходный модуль 200-R лежит в основе трехмерного объекта 300, формируемого из корпусов самоходных модулей 200.
В качестве альтернативы пользователь может вручную разместить опорный (референтный) самоходный модуль 200-R в желаемом месте (например, на поверхности стола), которое по сути будет представлять собой опорное (референтное) местоположение для формирования трехмерного объекта 300, так что опорный самоходный модуль 200-R может выдать данные об опорном местоположении на самоходные модули 200 с обеспечением возможности размещения указанных самоходных модулей 200 в заданных пространственных местоположениях с привязкой к опорному самоходному модулю 200-R. В одной из разновидностей данного альтернативного варианта реализации системы 500-1 опорный самоходный модуль 200-R может дополнительно содержать модуль определения местоположения (например, GPS-систему, Глонасс-систему, Beidou-систему или любую иную подходящую систему определения местоположения, известную в уровне техники), выполненный с возможностью определения пространственных координат указанного опорного самоходного модуля 200-R в реальном времени, и может быть дополнительно выполнен с возможностью выдачи определенных пространственных координат на самоходные модули 200, используемые для формирования трехмерного объекта 300, для уточнения или корректировки пространственных координат области пространства, в которую должны быть направлены самоходные модули 200 из соответствующих парковочных станций системы 500-1 в количестве, соответствующем выбранной пользователем модели трехмерного объекта, и/или уточнения или корректировки по меньшей мере одного из пространственных местоположений, которые должны занять указанные направленные самоходные модули 200 по отношению к опорному местоположению, занимаемому опорным самоходным модулем 200-R, при формировании трехмерного объекта 300. Еще в одной разновидности данного альтернативного варианта реализации системы 500-1 опорный самоходный модуль 200-R может дополнительно содержать сканирующий блок (не показан), выполненный с возможностью создания трехмерной карты пространства, окружающего место, в котором приземлился или был вручную размещен опорный самоходный модуль 200-R и которое следует считать опорным местоположением для формирования трехмерного объекта 300, и соединенный с возможностью обмена данными с блоком управления опорного самоходного модуля 200-R, так что блок управления опорного самоходного модуля 200-R может выдавать указанную трехмерную карту окружающего пространства на самоходные модули 200, используемые для формирования трехмерного объекта 300, для уточнения или корректировки пространственных координат области пространства, в которую должны быть направлены самоходные модули 200 из соответствующих парковочных станций системы 500-1 в количестве, соответствующем выбранной пользователем модели трехмерного объекта, и/или для уточнения или корректировки по меньшей мере одного из пространственных местоположений, которые должны занять указанные направленные самоходные модули 200 по отношению к опорному местоположению, занимаемому опорным самоходным модулем 200-R, при формировании трехмерного объекта 300, на основании указанной трехмерной карты окружающего пространства.
Следует отметить, что опорный (референтный) самоходный модуль 200-R в системе 500-1 может быть выполнен в виде самоходного модуля 200 в любом из его вариантов реализации, описанных в данном документе, или любого стационарного объекта, выполненного с возможностью его захвата или перемещения пользователем и снабженного блоком управления или приемопередатчиком, выполненным с возможностью обмена данными с самоходными модулями 200, входящими в состав системы 500-1 и используемыми для формирования трехмерного объекта 300, для выдачи на них данных об опорном (референтном) местоположении, занятом указанным объектом и используемом для задания пространственных местоположений для указанных самоходных модулей 200 при формировании трехмерного объекта 300.
Следует также отметить, что самоходные модули 200, парковочные станции (не показаны) и трехмерный объект 300, входящие в состав вышеописанной системы 500-1, показанной на фиг. 1, могут быть выполнены аналогично или идентично любому из вариантов реализации соответственно самоходных модулей 200, парковочных станций 100 и трехмерного объекта 300, описанных ниже в данном документе в отношении системы 500-2 для формирования трехмерного объекта, показанной на фиг. 2.
На фиг. 2 схематично показан обобщенный вариант реализации системы 500-2 для формирования трехмерного объекта согласно настоящему изобретению, которой лежит в основе каждого из частных или альтернативных вариантов реализации системы 500-2 для формирования трехмерного объекта, описанных ниже в данном документе. Система 500-2 может обеспечивать возможность формирования в воздухе, на воде, под водой и/или на суше (земле) статического трехмерного объекта, динамического трехмерного объекта или их любого сочетания. В частности, система 500-2 может обеспечивать возможность формирования в воздухе (непосредственно в самом воздушном пространстве и/или на поверхности любого наземного объекта), на воде (непосредственно на поверхности водного пространства и/или на поверхности любого надводного объекта), под водой (непосредственно под водой и/или на поверхности любого подводного объекта) и/или на суше или земле (непосредственно на самой земле и/или на поверхности любого наземного объекта), в частности в заданной или выбранной пользователем области пространства или предварительно заданной области пространства, трехмерного (3D) объекта, состоящего только из статических (неподвижных) элементов трехмерного объекта, состоящего только из динамических (подвижных) элементов трехмерного объекта или состоящего из заданной комбинации статических (неподвижных) элементов трехмерного объекта и динамических (подвижных) элементов трехмерного объекта.
Следует также отметить, что система 500-2 для формирования трехмерного объекта, показанная на фиг. 2, и ее частные или альтернативные варианты реализации, описанные ниже в данном документе, в целом имеют схожую или аналогичную структуру или архитектуру, в связи с чем схожие или идентичные функциональные компоненты, входящие в состав этих систем 500-2 для формирования трехмерного объекта, обозначены на фиг. 2-5 и в тексте данного документа с использованием одних и тех же ссылочных номеров. Для удобства повествования все разновидности систем 500-2 для формирования трехмерного объекта, описанные в данном документе со ссылкой на фиг. 2-5, обозначены в тексте данного документа с использованием ссылочного номера (500-2).
Как показано на фиг. 2, система 500-2 для формирования трехмерного объекта содержит три парковочные станции 100-1, 100-2, 100-3, которые для удобства повествования обозначены в данном документе с использованием ссылочного номера (100).
Как показано на фиг. 2, система 500-2 также содержит один или более самоходных модулей 200-1, один или более самоходных модулей 200-2 и один или более самоходных модулей 200-3, каждый из которых первоначально размещен, хранится или припаркован в одной из парковочных станций 100, входящих в состав системы 500-2, при этом самоходные модули 200-1, 200-2 и 200-3 имеют разные типы, характеризующиеся разными возможностями перемещения таких самоходных модулей в пространстве, и отдельно показаны на фиг. 3 в качестве примера.
Как показано на фиг. 3, самоходные модули 200-1 снабжены каждый колесным движителем или колесными движителями, обеспечивающими возможность перемещения самоходного модуля 200-1 по поверхности земли (суши), а также возможность перемещения такого самоходного модуля 200-1 по поверхности неподвижного или подвижного физического объекта, который по меньшей мере частично может находиться в воздушном пространстве, наземном пространстве, надводном пространстве и/или подводном пространстве, при этом такой самоходный модуль 200-1, при необходимости, может быть адаптирован (приспособлен) или модифицирован с обеспечением возможности его перемещения (полета) по воздуху или в воздухе, возможности перемещения по поверхности воды (плавания) по меньшей мере с частичным погружением тела самоходного модуля 200-1 в воду и/или возможности перемещения под водой по типу подводного аппарата.
Кроме того, как показано на фиг. 3, самоходные модули 200-2 снабжены каждый воздушными движителями, обеспечивающими возможность перемещения (полета) самоходного модуля 200-2 по воздуху или в воздухе, возможность посадки такого самоходного модуля 200-2 на поверхность земли и/или возможность посадки на поверхность неподвижного или подвижного физического объекта, который по меньшей мере частично может находиться в воздушном пространстве, наземном пространстве, надводном пространстве и/или подводном пространстве, при этом такой самоходный модуль 200-2, при необходимости, может быть адаптирован или модифицирован с обеспечением возможности посадки на поверхность воды по меньшей мере с частичным погружением тела самоходного модуля 200-2 в воду, возможности посадки на поверхность воды с последующим полным погружением тела самоходного модуля 200-2 под воду, возможности перемещения под водой по типу подводного аппарата, возможности перемещения по поверхности воды и/или возможности перемещения по поверхности земли (по суше). Кроме того, как показано на фиг. 3, самоходные модули 200-3 снабжены каждый сразу двумя типами движителей: (1) воздушными движителями и (2) колесными движителями, что обеспечивает возможность перемещения такого самоходного модуля 200-3 по поверхности земли (суши), возможность перемещения (полета) такого самоходного модуля 200-3 по воздуху или в воздухе, возможность перемещения такого самоходного модуля 200-3 по поверхности неподвижного или подвижного физического объекта, который по меньшей мере частично может находиться в воздушном пространстве, наземном пространстве, надводном пространстве и/или подводном пространстве, а также возможность посадки такого самоходного модуля 200-3 на поверхность земли и/или возможность посадки на поверхность неподвижного или подвижного физического объекта, который по меньшей мере частично может находиться в воздушном пространстве, наземном пространстве, надводном пространстве и/или подводном пространстве, при этом такой самоходный модуль 200-3, при необходимости, также может быть адаптирован (приспособлен) или модифицирован с обеспечением возможности посадки на поверхность воды по меньшей мере с частичным погружением тела самоходного модуля 200-3 в воду, возможности посадки на поверхность воды с последующим полным погружением тела самоходного модуля 200-3 под воду, возможности перемещения под водой по типу подводного аппарата и/или возможности перемещения по поверхности воды. Таким образом, самоходный модуль 200-3 по сути снабжен каждым из движителей, установленных на самоходных модулях 200-1, 200-2.
Кроме того, на фиг. 3 показан самоходный модуль 200-4, который снабжен винтовым движителем, обеспечивающим возможность перемещения такого самоходного модуля 200-4 под водой, при этом такой самоходный модуль 200-4, при необходимости, также может быть адаптирован (приспособлен) или модифицирован с обеспечением возможности перемещения под водой, возможности перемещения по поверхности земли (по суше), возможности перемещения (полета) в воздухе и/или возможности перемещения по поверхности неподвижного или подвижного физического объекта, который по меньшей мере частично может находиться в воздушном пространстве, наземном пространстве, надводном пространстве и/или подводном пространстве.
Кроме того, на фиг. 3 показан самоходный модуль 200-5, который снабжен винтовым движителем, обеспечивающим возможность перемещения такого самоходного модуля 200-5 по поверхности воды, при этом такой самоходный модуль 200-5, при необходимости, также может быть адаптирован (приспособлен) или модифицирован с обеспечением возможности перемещения по поверхности воды, возможности перемещения по поверхности земли (по суше), возможности перемещения (полета) в воздухе и/или возможности перемещения по поверхности неподвижного или подвижного физического объекта, который по меньшей мере частично может находиться в воздушном пространстве, наземном пространстве, надводном пространстве и/или подводном пространстве.
На фиг. 4 в качестве примера показан комбинированный самоходный модуль 200-6, корпус 210 которого содержит балластную камеру или цистерну, выполненную с возможностью набора забортной жидкости (например, воды) для обеспечения возможности по меньшей мере частичного или полного погружения такого самоходного модуля 200-6 в воду и с возможностью выпуска из нее воды для по меньшей мере частичного всплытия такого самоходного модуля 200-6 и который содержит несколько разных типов движителей 200, которые могут быть последовательно или частично одновременно приведены в действие: воздушные движители в виде воздушных винтов, колесные движители и надводно-подводный движитель в виде гребного винта, что позволяет такому самоходному модулю 200-6 совершать перемещение по воздуху, по суше (земле), по воде и/или под водой в зависимости от заданной области пространства, в которой предполагается сформировать трехмерный объект 300, и от пространственного местоположения, которое такой самоходный модуль 200-6 должен будет занять и поддерживать при нахождении в составе указанного трехмерного объекта 300. Таким образом, самоходный модуль 200-6 по сути снабжен каждым из движителей, которые установлены на самоходных модулях 200-1, 200-2, 200-3, 200-4, 200-5. В некоторых вариантах реализации настоящего изобретения в подобном комбинированном самоходном модуле 200 могут быть использованы движители двух и более типов, а также движители одного и того же типа, но реализованные по-разному (например, гусеничные движители и колесные движители).
Вышеописанные самоходные модули 200-1, самоходные модули 200-2, самоходные модули 200-3, самоходные модули 200-4, самоходные модули 200-5 и самоходные модули 200-6, которые могут входить в состав системы 500-2, для удобства повествования также обозначены в данном документе с использованием ссылочного номера (200). Кроме того, для удобства повествования все движители 220, входящие в состав разных самоходных модулей 200, описанных в данном документе со ссылкой на фиг. 2-3, также обозначены в данном документе с использованием ссылочного номера (220).
Следует отметить, что для формирования трехмерного объекта могут быть использованы самоходные модули 200 одного, или двух или нескольких типов, в том числе могут быть использованы по меньшей мере один или по меньшей мере два из вышеописанных типов самоходных модулей 200.
Следует также отметить, что самоходные модули 200 могут быть снабжены и любыми иными известными в уровне техники движителями 220, приведение в действие или включение которых может обеспечивать возможность полета, езды, ходьбы, перекатывания (перемещения путем качения), переваливания (перемещения путем смещения центра тяжести), шагания (перемещения шагом, в частности с использованием шагающих движителей), прыганья (перемещения прыжками) и т.п.
Кроме того, в состав системы 500-2 для формирования трехмерного объекта также входит управляющее устройство (не показано), соединенное, посредством сети связи (не показана), с пар ковочными станциями 100 и с самоходными модулями 200 с возможностью обмена с ними данными и возможностью управления их работой.
Управляющее устройство (не показано), входящее в состав системы 500-2 для формирования трехмерного объекта, показанной на фиг. 2, выполнено с возможностью получения и обработки данных от самоходных модулей 200 и парковочных станций 100, а также выполнено с возможностью генерирования управляющих инструкций/команд или навигационных инструкций/команд на основании указанных полученных данных и результатов их обработки с обеспечением возможности выдачи или направления таких сгенерированных управляющих или навигационных команд по меньшей мере на один из самоходных модулей 200 и/или на по меньшей мере на одну из парковочных станций 100, в том числе в ответ на запрос указанного самоходного модуля 200 и/или в ответ на запрос указанной парковочной станции 100.
В некоторых вариантах реализации настоящего изобретения протоколы передачи данных и/или технические средства, используемые для передачи данных между управляющим устройством (не показано), самоходными модулями 200 и парковочными станциями 100, могут по меньшей мере частично отличаться или могут совпадать. Кроме того, для обмена данными могут быть одновременно использованы один или более протоколов связи и соответствующих технических средств связи.
В других вариантах реализации настоящего изобретения для обмена данными между управляющим устройством (не показано), самоходными модулями 200 и парковочными станциями 100 в системе 500-2 могут быть использованы одно или более средств связи из группы средств связи, содержащей: радиоантенны KB диапазона, радиоантенны УКВ диапазона, радиоантенны СВЧ диапазона, модуль оптической связи, модуль спутниковой связи полудуплекс/симплекс, модуль сотовой связи 2G/3G/4G/LTE/5G, модуль сетевой беспроводной или проводной связи.
Управляющее устройство (не показано) в системе 500-2 представляет собой одиночный сервер, который может быть выполнен в виде, например, сервера Dell™ PowerEdge™, на котором может быть использована операционная система Ubuntu Server или Windows Server. В некоторых вариантах реализации настоящего изобретения управляющее устройство (не показано) в системе 500-2 может представлять собой любое другое подходящее аппаратное обеспечение, прикладное программное обеспечение, системное программное обеспечение или их любую комбинацию. В других вариантах реализации настоящего изобретения функции управляющего устройства (не показано) в системе 500-2 могут быть разделены между несколькими компьютерными или вычислительными устройствами, например, могут быть реализованы с помощью нескольких серверов, соединенных между собой с возможностью обмена данными. Кроме того, управляющее устройство (не показано) в системе 500-2 может иметь доступ по меньшей мере к одной базе данных по сети связи или иным способом, либо может содержать по меньшей мере одну локальную базу данных, хранящуюся на запоминающем устройстве или в памяти такого управляющего устройства.
В отдельных вариантах реализации настоящего изобретения управляющее устройство системы 500-2 может быть выполнено с возможностью организации движения и возможностью обеспечения безопасности при перемещении самоходных модулей 200 по воздуху, по суше (земле), по воде и/или под водой, в частности при нахождении самоходных модулей 200 в заданной области пространства, в которую указанные самоходные модули 200 могут быть направлены указанным управляющим устройством. Кроме того, управляющее устройство системы 500-2 может быть выполнено с возможностью приема и обработки запроса на направление самоходных модулей 200 из одной и более парковочных станций 100 в заданную область пространства и запроса на размещение каждого из указанных направленных самоходных модулей 200 в заданном пространственном местоположении в соответствии с заданной моделью трехмерного объекта, которая может быть доступна управляющему устройству системы 500-2 и которая может быть выдана на управляющее устройство системы 500-2 от внешнего источника данных (не показан), при этом указанные запросы могут быть выданы каждый на управляющее устройство системы 500-2 с использованием, например, пользовательского устройства, выполненного с возможностью установления связи с управляющим устройством системы 500-2 для обмена с ним данными. Следует отметить, что область пространства, в которую управляющее устройство системы 500-2 направляет самоходные модули 20 из соответствующих парковочных станций 100, может по сути соответствовать заданной области надводного пространства, заданной области подводного пространства, заданной области наземного пространства, заданной области воздушного пространства или их любому подходящему сочетанию и может иметь предварительно заданные географические координаты, однозначно идентифицирующие местоположение указанной области пространства.
Сеть связи системы 500-2, с которой предпочтительно соединены с возможностью обмена данными управляющее устройство системы 500-2, парковочные станции 100 и самоходные модули 200, по сути позволяет управляющему устройству системы 500-2, пар ковочным станциям 100 и самоходным модулям 200 обмениваться друг с другом системными и/или рабочими данными, которые они используют для реализации своих функций или функциональных возможностей, описанных в данном документе. В качестве такой сети связи может быть использована любая подходящая линия беспроводной связи, известная в уровне техники, например, линия связи на основе технологии беспроводной связи «WiFi», линия связи на основе технологии беспроводной связи «2G», «3G», «4G» или «5G», сеть связи на основе технологии «LTE» и/или т.п.
В одном из вариантов реализации настоящего изобретения в состав системы 500-2 для формирования трехмерного объекта могут входить две и более сетей беспроводной связи, выполненных каждая аналогично вышеописанной сети связи системы 500-2, для осуществления обмена данными между парковочными станциями 100, самоходными модулями 200, управляющим устройством системы 500-2 и любыми иными функциональными устройствами, которые могут дополнительно входить в состав система 500-2 и которые описаны в данном документе, в режиме реального времени или в реальном времени.
В одном из вариантов реализации настоящего изобретения в состав системы 500-2 для формирования трехмерного объекта могут входить по меньшей мере одна парковочная станция 100 или одна и более парковочных станций 100 (например, одна, две, три, четыре, пять, шесть, семь, восемь, девять, десять и более парковочных станций 100). Следует отметить, что в случае использования только одной парковочной станции 100 она должна быть выполнена с возможностью размещения, парковки или хранения в ней всех самоходных модулей 200, входящих в состав системы 500-2. Следует также отметить, что в случае использования двух и более парковочных станций 100 каждая из этих парковочных станций должна быть выполнена с возможностью размещения, парковки или хранения в ней по меньшей мере заданной части самоходных модулей из числа самоходных модулей 200, входящих в состав системы 500-2, при этом количество самоходных модулей 200, размещаемых в таких парковочных станциях 100, равно как и их формы, размеры, типы, технические характеристики и т.п. таких самоходных модулей 200, могут быть как одинаковыми, так и различными.
Парковочные станции 100, входящие в состав системы 500-2 для формирования трехмерного объекта, показанной на фиг. 2, предназначены каждая для размещения, хранения или парковки в них самоходных модулей 200. Следует отметить, что для формирования трехмерного объекта система 500-2 может вообще не задействовать парковочные станции 100 (в частности, может по меньшей мере частично задействовать самоходные модули 200, находящиеся в воздухе на заданном расстоянии от области пространства, в которой предполагается формировать трехмерный объект, или же самоходные модули 200, используемые для формирования других трехмерных объектов в близлежащих областях пространства, удаленных от указанной области пространства на расстояние в пределах порогового значения), может задействовать всего одну парковочную станцию 100 или может задействовать две и более парковочных станций 100 (т.е. три, четыре, пять, шесть, семь, восемь, девять, десять и более), которые географически удалены друг от друга или расположены на расстоянии друг от друга и которые находятся в пределах зоны, окружающей область пространства, в которой предполагается формировать трехмерный объект. Например, парковочные станции 100 могут быть расположены на расстоянии в несколько метров, десятков метров, сотен метров друг от друга или несколько километров друг от друга.
Следует отметить, что географическое или пространственное расположение парковочных станций 100 должно обеспечивать возможность своевременной замены одного или нескольких самоходных модулей 200, в том числе в случае необходимости перемещения формируемого трехмерного объекта в воздухе, по воде, по суше и/или под водой в различных направлениях и на различные расстояния по отношению к области пространства, в которой указанный трехмерный объект был изначально или первоначально сформирован, либо в случае перестраивания всего трехмерного объекта 300 или по меньшей мере одной его части с последующей трансформацией в иной трехмерный объект или с последующим формированием иного трехмерного объекта, как схематично показано в качестве примера на фиг. 6. В частности, на фиг. 6 показано, что трехмерный объект 300 в виде сооружения или здания, сформированный из самоходных модулей 200-1, 200-2, 200-3 с использованием системы 500-2, показанной на фиг. 2, может быть расформирован в ответ, например, на управляющие команды управляющего устройства системы 500-2, с последующим использованием по меньшей мере части из высвободившихся самоходных модулей 200-1, 200-2, 200-3 для формирования иного трехмерного объекта, отличного от трехмерного объекта 300, в частности для формирования трехмерного объекта 300-А в виде автомобиля, трехмерного объекта 300-В в виде медведя и/или трехмерного объекта 300-С в виде двух многоэтажных домов. Например, парковочные станции 100 могут быть расположены через каждые 10 м, 100 м, 500-2 м, 1 км или через каждые 10 км и т.п. Для специалиста в данной области техники должно быть очевидно, что количество парковочных станций 100 и их взаимное расположение могут отличаться в зависимости от конкретных географических локаций (в частности, в зависимости от того, находится ли область пространства, в которой предполагается формировать трехмерный объект, на открытом воздухе, в городской черте, под водой, на воде, или за ее пределами или трехмерный объект формируется внутри здания, например в квартире, в выставочном зале, зале кинотеатра, помещении офиса или т.п.). В частности, в крупных городах может быть востребовано большее количество парковочных станций 100 на меньшем расстоянии друг от друга, чем в небольших городах, между городами или в иных возможных локациях за пределами города. Для формирования трехмерного объекта внутри здания может быть достаточно как одной парковочной станции 100, так и нескольких парковочных станций 100.
Любая из парковочных станций 100, показанных на фиг. 2, представляет собой стационарную конструкцию, снабженную отсеками для размещения в ней по меньшей мере части из самоходных модулей 200, входящих в состав системы 500-2, и выполненную с возможностью ее размещения на подвижном или стационарном объекте, находящимся на воде, под водой, в воздухе и/или на суше (земле).
В одном из вариантов реализации настоящего изобретения по меньшей мере одна из парковочных станций 100, входящих в состав системы 500-2, или каждая из них может быть реализована в виде специального корпуса или специальной конструкции, приспособленной для размещения, хранения или парковки в ней одного или более из самоходных модулей 200, входящих в состав системы 500-2, и установленной на неподвижном объекте, находящимся по существу в фиксированном положении на поверхности воды (например, на заякоренной надводной платформе или любом ином заякоренном надводном объекте), в воздухе (например, на заякоренном аэростате, заякоренном воздушном шаре или ином заякоренном воздушном объекте), на земле (например, на наземной платформе, в здании или на нем, либо на ином сооружении или ином стационарном объекте на поверхности земли или в нем) или под водой (например, на заякоренной подводной платформе или ином заякоренном подводном объекте).
В другом варианте реализации настоящего изобретения по меньшей мере одна из парковочных станций 100, входящих в состав системы 500-2, или каждая из них может быть реализована в виде специального корпуса или специальной конструкции, приспособленной для размещения, хранения или парковки в ней одного или более из самоходных модулей 200, входящих в состав системы 500-2, и установленной на подвижном объекте, выполненном с возможностью изменения своего пространственного или географического местоположения, в частности с возможностью перемещения по воде, под водой, по суше (земле) и/или в воздуху. Например, парковочная станция 100 может быть установлена в кузове грузовика, на пароме, барже, катете, корабле, самолете, вертолете, аэростате, батискафе, подводной лодке или ином транспортном средстве надводного, подводного, наземного и/или воздушного базирования, которое обеспечивает возможность изменения пространственного или географического местоположения указанной парковочной станции 100, что позволяет оперативно размещать парковочные станции, используемые в составе системы 500-2, в надлежащем количестве (в том числе в дополнение к имеющимся стационарным парковочных станциям 100) в непосредственной близости от области пространства, в которой предполагается сформировать трехмерный объект.
Еще в одном варианте реализации настоящего изобретения по меньшей мере одна из парковочных станций 100, входящих в состав системы 500-2, или каждая из них может представлять собой переносной корпус, выполненный, например, в виде рюкзака, чемодана или сумки на колесах, который может перемещаться человеком без использования вспомогательных технических средств.
Еще в одном варианте реализации настоящего изобретения по меньшей мере одна из парковочных станций 100, входящих в состав системы 500-2, или каждая из них может быть реализована в виде подвижной конструкции или специального транспортного средства надводного, подводного, наземного и/или воздушного базирования, кузов или корпус которого может быть приспособлен для размещения, хранения или парковки в нем одного или более из самоходных модулей 200, входящих в состав. Подвижные парковочные станции 100 могут перемещаться между различными географическими локациями с учетом наиболее востребованных локаций для формирования трехмерного объекта с помощью самоходных модулей 200 и с учетом потребностей в оптимизации замен самоходных модулей 200, используемых для формирования трехмерного объекта. Для специалиста в данной области техники должно быть очевидно, что некоторые стационарные или подвижные парковочные станции могут совместно использоваться двумя и более системами для формирования трехмерного объекта, выполненными каждая аналогично системе 500-2.
Следует отметить, что система 500-2 для формирования трехмерного объекта может содержать парковочные станции любого типа (например, наземные стационарные, водные стационарные, воздушные стационарные, наземные подвижные, водные подвижные, воздушные подвижные, подводные стационарные, подводные подвижные парковочные станции и/или т.п.), выполненные каждая с возможностью парковки или временного хранения по меньшей мере одного из самоходных модулей 200, входящих в состав по меньшей мере одной системы 500-2 или совместно используемого системой 500-2 и по меньшей мере одной другой системой для формирования трехмерного объекта, подобной системе 500-2.
Кроме того, каждая из парковочных станций 100, входящих в состав системы 500-2 для формирования трехмерного объекта, показанной на фиг. 2, может быть снабжена одним или более источниками питания (не показаны), каждый из которых может представлять собой одну или более аккумуляторных батарей, генератор на основе двигателя внутреннего сгорания, генератор на основе водородного двигателя, солнечную батарею и любой иной подходящий источник энергии, известный в уровне техники, и может быть снабжена одним или более зарядными устройствами (не показаны), электрически соединенными каждый по меньшей мере с одним из указанных источников питания парковочной станции 100 и обеспечивающими каждое возможность подключения к нему по меньшей мере одного из самоходных модулей 200, помещаемых на хранение или паркуемых в парковочной станции 100, с обеспечением возможности подзарядки, дозарядки или восполнения запаса хода указанного подключенного самоходного модуля 200. Следует отметить, что по меньшей мере одно из зарядных устройств (не показаны) парковочной станции 100 или каждое из них может представлять собой беспроводное зарядное устройство, проводное зарядное устройство или зарядную док-станцию. В частности, по меньшей мере одно из зарядных устройств, которыми может быть снабжена по меньшей мере одна из парковочных станций 100, входящих в состав системы 500-2, или каждое из них может быть выполнено, например, в виде устройства для подачи электрической энергии, устройства для подачи жидкого или газообразного топлива и/или т.п. В одном из вариантов реализации настоящего изобретения по меньшей мере одно из зарядных устройств (не показаны), которыми может быть снабжена любая из парковочных станций 100, входящих в состав системы 500-2, или каждое из них может быть гидравлически соединено с помощью насоса (не показан), соединенного гидравлической линией с резервуаром или емкостью (не показана) с топливом с возможностью забора этого топлива из указанной емкости, с обеспечением возможности подачи указанного забранного объема топлива в топливный бак самоходного модуля 200, гидравлически соединенный с работающим на топливе двигателем самоходного модуля 200, для восполнения запаса его хода (в частности, благодаря по меньшей мере частичному восполнению объема топлива в топливном баке самоходного модуля 200).
В некоторых вариантах реализации настоящего изобретения по меньшей мере часть самоходных модулей 200, используемых для формирования трехмерного объекта, может входить в состав системы 500-2 для формирования трехмерного объекта, показанной на фиг. 2, а другая часть самоходных модулей 200, используемых для формирования трехмерного объекта, может и не входить в состав этой системы 500-2, при этом каждая из парковочных станций 100, входящих в состав системы 500-2, может быть адаптирована или приспособлена для размещения в ней самоходных модулей 200 с различными модификациями, габаритами, силовыми установками и/или т.п., известными в уровне техники.
Следует отметить, что к самоходным модулям 200, входящим в состав системы 500-2 для формирования трехмерного объекта, показанной на фиг. 2, следует относить как самоходные модули 200, которые могут находиться в заданной области пространства (в частности, в воздушном пространстве, надводном пространстве, подводном пространстве, наземном пространстве или на подвижном/неподвижном объекте в одном из указанных пространств) или могут быть направлены в такую область пространства, так и самоходные модули 200, размещенные в парковочных станциях 100 или на них, а также любые иные самоходные модули 200, которые могут быть дополнительно направлены (например, в качестве заменяющих или дополнительных самоходных модулей 200) в указанную область пространства или по меньшей мере в одну из указанных парковочных станций 100 по меньшей мере из одной другой системы для формирования трехмерного объекта, аналогичной системе 500-2, при этом специалисту в данной области техники должно быть очевидно, что по меньшей мере часть из самоходных модулей 200, входящих в состав системы 500-2, могут иметь разные типы, модификации, конструкции, габаритные размеры, массы, силовые установки и/или т.п.
По меньшей мере один из самоходных модулей, входящих в состав системы 500-2, или каждый из них может быть выполнен в виде беспилотного летательного аппарата (БПЛА), беспилотного надводного аппарата, беспилотного подводного аппарата, беспилотного наземного аппарата (в том числе на гусеничной или колесной базе) или гибридного аппарата, выполненного с возможностью перемещения по воде, под водой, по суше (земле) и/или в воздухе.
Каждый из самоходных модулей 200, входящих в состав системы 500-2, содержит каркас или корпус 210 любого подходящего типа, а также содержит по меньшей мере два движителя 220, каждый из которых выполнен в виде винта и которые размещены или установлены на корпусе 210 с его внешней стороны, и блок управления (не показан), установленный внутри корпуса 210 и выполненный с возможностью управления работой самоходного модуля 200, в том числе работой его движителей 220. Кроме того, в состав каждого из самоходных модулей 200 может входить по меньшей мере одно из следующих средств беспроводной связи: радиоантенна KB диапазона, радиоантенна УКВ диапазона, радиоантенна СВЧ диапазона, модуль оптической связи, модуль спутниковой связи полудуплекс/симплекс, модуль сотовой связи 2G/3G/4G/LTE/5G, модуль сетевой беспроводной связи между несколькими самоходными модулями и/или ретрансляторами и т.п.
Следует отметить, что в зависимости от области пространства (в частности, в зависимости от того, относится ли эта область пространства к водному пространству, наземному пространству, подводному пространству, воздушному пространству или их комбинации), в которой предполагается сформировать трехмерный объект в соответствии с заданной моделью трехмерного объекта, по меньшей мере один из движителей 220 по меньшей мере в одном из самоходных модулей 200, входящих в состав системы 500-2, или каждом из них может быть выполнен в виде одного из группы движителей, содержащей: парус, гребной винт, крыльчатый движитель, лопастной винт, водометный движитель, гребное колесо, весельный движитель, ластовый движитель, движитель по типу рыбьего хвоста, колесное шасси из одного и более колес, пневмокатковый движитель, роторно-фрезерный движитель, гусеничный движитель, полугусеничный движитель, лыжно-гусеничный движитель, шнекороторный движитель, шагающий движитель, электромагнитный движитель, реактивный движитель, движитель на основе машущего крыла, движитель на основе шагающего колеса, движитель на основе квадратного колеса, вибрационный движитель, движитель амебного типа, движитель на основе секционного колеса и инерционный движитель. Таким образом, в некоторых вариантах реализации настоящего изобретения по меньшей мере часть из самоходных модулей 200, входящих в состав системы 500-2, может быть снабжена двумя и более движителями 220 разного типа (например, воздушным винтом лопастного типа и весельным движителем), что позволяет каждому такому самоходному модулю 200 не только находится в одной из областей пространства (в частности, в области воздушного пространства или области надводного пространства), соответствующих каждая одному из типов указанных движителей 200 (в частности, воздушному винту лопастного типа и весельному движителю), но и перемещаться из одной области пространства (например, из области воздушного пространства), соответствующей одному типу движителя (в частности, воздушному винту лопастного типа) из указанных движителей 200, в другую область пространства (в частности, в область надводного пространства), соответствующую другому типу движителя из указанных движителей 200 (в частности, весельному движителю).
В одном из вариантов реализации настоящего изобретения по меньшей мере один из движителей 220, которыми может быть снабжен по меньшей мере один из самоходных модулей 200, входящих в состав системы 500-2, или каждый из них, может быть выполнен с возможностью его преобразования или трансформации из одного типа в другой тип, что обеспечивает возможность изменения типа указанного движителя 220 в любой последовательности между типами из группы типов, содержащей: наземный тип, надводный тип, подводный тип и воздушный тип. Следует отметить, что изменение типа движителя 220 в самоходном модуле 200 может приводить и к изменению типа самого самоходного модуля 200, поскольку изменение типа движителя 220 по сути приводит к изменению пространства, в котором такой самоходный модуль 200 осуществляет свое перемещение. Например, самоходный модуль 200, ранее совершавший перемещение в воздушном пространстве благодаря использованию движителя 220 воздушного типа, при изменении типа движителя 220 с воздушного на любой иной тип из вышеописанных типов движителей может продолжить свое перемещение уже в наземном пространстве, надводном пространстве или подводном пространстве. В частности, в одной из разновидностей данного варианта реализации настоящего изобретения по меньшей мере один из движителей 220 в самоходном модуле 200 может быть выполнен в виде лопастного винта, функционально соединенного, посредством по меньшей мере одного подвижного рабочего элемента или по меньшей мере двух взаимодействующих между собой рабочих элементов, с приводным устройством самоходного модуля 200, находящегося под управлением блока управления самоходного модуля 200, с обеспечением возможности изменения местоположения указанного лопастного винта по отношению к корпусу 210 этого самоходного модуля 200 для преобразования указанного лопастного винта, например, из воздушного типа в надводный тип, наземный тип или подводный тип. Кроме того, в данной разновидности варианта реализации настоящего изобретения корпус 210 в таком самоходном модуле 200, в котором по меньшей мере один из движителей 220 выполнен в виде лопастного винта, может быть дополнительно выполнен с возможностью забора воды или воздуха из окружающего пространства в корпус 210 и с возможностью выпуска ранее забранной воды или ранее забранного воздуха из корпуса 210 для изменения типа самоходного модуля 220 с надводного на подводный (в частности, при заборе воды из окружающего водного пространства в специальные отсеки корпуса 210) или с наземного/надводного на воздушный (например, при заборе воздуха из окружающего воздушного пространства, его последующем нагреве нагревающим устройством и подачей в специальные раздуваемые воздухом камеры с внешней стороны корпуса 210) и наоборот (при выпуске соответственно воды или воздуха из корпуса 210).
В другом варианте реализации настоящего изобретения корпус 210 по меньшей мере одного из самоходных модулей 200, входящих в состав системы 500-2, или каждый из них может быть дополнительно снабжен присосками, способствующими закреплению или удержанию самоходного модуля 200 на физическом объекте с плоской и однородной поверхностью (например, на конструкции из стекла), липучками, способствующими закреплению или удержанию самоходного модуля 200 на физическом объекте из тканевого материала или объекте, покрытом тканевым материалом, магнитами, способствующими закреплению или удержанию самоходного модуля 200 на физическом объекте из материала, относящегося к ферромагнетикам (например, из железа, чугуна, стали, никеля и т.п.).
Блок управления (не показан), входящий в состав каждого из самоходных модулей 200, используемых в составе системы 500-2, соединен посредством вышеописанной сети связи (не показана) с управляющим устройством (не показано) с возможностью обмена с ним данными, что позволяет указанному блоку управления принимать и обрабатывать навигационные команды и/или управляющие команды от указанного управляющего устройства с обеспечением возможности управления работой указанного самоходного модуля 200 в зависимости от указанных навигационных команд и/или управляющих команд. В частности, в ответ на навигационные команды и/или управляющие команды от управляющего устройства (не показано), входящего в состав системы 500-2, блок управления самоходного модуля 200 может обеспечивать, например, возможность изменения скорости или направления полета самоходного модуля 200, направление самоходного модуля 200 из одной из парковочной станций 100, в которой он был изначально размещен, в заданную область пространства, возврат самоходного модуля 200 на одну из парковочных станций 100 для хранения и/или восполнения запаса хода, направления самоходного модуля 200 из одной заданной области пространства в другую заданную область пространства и/или т.п. Следует отметить, что области пространства, в которых может быть сформирован трехмерный объект с использованием самоходных модулей 200, входящих в состав системы 500-2, показанной на фиг. 2, могут быть предварительно известны управляющему устройству системы 500-2 (например, координаты таких областей пространства могут быть предварительно записаны в память управляющего устройства системы 500-2), или могут быть сообщены управляющему устройству системы 500-2 из внешнего источника данных (например, из базы данных, сервера, пользовательского устройства и т.п.). В частности, область пространства, в которой должен быть сформирован заданный трехмерный объект, может быть выбрана или задана пользователем с использованием средств ввода-вывода (например, с использованием кнопки, по меньшей мере одной из экранных кнопок или экранной клавиатура на сенсорном экране, средств голосового ввода данных и/или т.п.) своего пользовательского устройства, которое может быть выполнено в виде мобильного телефона, смартфона, ноутбука, персонального компьютера или любого иного подходящего для этих целей вычислительного устройства, известного в уровне техники, и которое может устанавливать связь с управляющим устройством системы 500-2 с использованием вышеописанной или иной сети связи для передачи на управляющее устройство системы 500-2 данных о выбранной пользователем области пространства, в которой должен быть сформирован трехмерный объект, или данных о введенных или выбранных пользователем координатах такой области пространства.
Корпус 210 любого из самоходных модулей 200, входящих в состав системы 500-2, показанной на фиг. 2, может иметь любые подходящие форму и габаритные размеры, характерные в уровне техники для любого известного самоходного модуля, и может быть выполнен из любого подходящего материала, известного в уровне техники и обычно используемого для изготовления корпусов самоходных модулей (например, из композитного материала, алюминия, пластика и/или т.п.). Таким образом, тип, форма, габаритные размеры и материал корпуса 210 в самоходном модуле 200 никак конкретно не ограничены в рамках настоящего изобретения. В частности, корпус 210 может иметь форму, в целом схожую с корпусом вертолета, однако специалисту в данной области техники должно быть очевидно, что корпус 210 может иметь любую другую форму, похожую на любое другое воздушное, надводное, подводное или наземное транспортное средство (в зависимости от области пространства, в которой предполагается формировать трехмерный объект в соответствии с заданной моделью трехмерного объекта), например на самолет, шаттл, дельтаплан, параплан, катер, паром, баржу, теплоход, корабль, катамаран, батискаф, подводную лодку, батиплан, подводный аппарат, автомобиль, грузовик, мотоцикл, велосипед, или любой другой аналогичный самоходный аппарат, известный в уровне техники.
В некоторых вариантах реализации настоящего изобретения корпус 210 может иметь форму, подобную любому позвоночному животному (например, рыбе, птице, рептилии, амфибии, млекопитающему и т.п.), беспозвоночному животному (например, моллюску, губке, кольчатому червю, плоскому червю, круглому червю и т.п.), членистоногому животному (например, ракообразному, многоножке, паукообразному животному) или насекомому (например, жуку, пчеле, осе, муравью, бабочке, мотыльку, мухе и т.п.), известному в уровне техники.
В иных вариантах реализации настоящего изобретения корпус 210 по меньшей мере одного или каждого из самоходных модулей 200, входящих в состав системы 500-2, может быть выполнен в виде правильной или неправильной геометрической трехмерной фигуры, например, в виде куба, кубоида, шара или сферы, квадратной пирамиды, тетраэдра (треугольной пирамиды), шестиугольной пирамиды, треугольной призмы, шестигранника (октаэдра), пятиугольной призмы, шестиугольной призмы, двенадцатигранника, эллипсоида, двадцатигранника (икосаэдра), конуса, цилиндра или любой иной известной трехмерной фигуры. В некоторых иных вариантах реализации настоящего изобретения по меньшей мере часть корпуса 210 по меньшей мере в одном или каждом из самоходных модулей 200, входящих в состав системы 500-2, может иметь в разрезе (продольном или поперечном сечении) форму треугольника, квадрата, круга, овала, прямоугольника, параллелограмма, ромба, трапеции, четырехугольника, пятиугольника, шестиугольника, семиугольника, восьмиугольника, девятиугольника, десятиугольника, двадцатиугольника или любой иной известной правильной или неправильной геометрической фигуры. В других вариантах реализации настоящего изобретения корпус 210 по меньшей мере одного или каждого из самоходных модулей 200, входящих в состав системы 500-2, может быть выполнен в виде орбиформы (фигуры с кривой постоянной ширины или многоугольник Реле), олоида (при качении касается поверхности качения всеми точками своих граней, а также имеет постоянный центр масс, что обеспечивает ей возможности плавного качения, то есть без рывков и вибраций), одной фигуры Штейнмера, представляющей собой пересечение трех цилиндров одинакового радиуса под прямым углом, другой фигуры Штейнмера, представляющей собой пересечение двух цилиндров одинакового радиуса под прямым углом (т.е. бицилиндр, который способен катиться одновременно по двум осям вращения), воблера, сферикона их цилиндра, конуса, тора и т.п.
В различных вариантах реализации настоящего изобретения корпус 210 может быть выполнен в виде орнитоптера или энтомоптера (также известного в уровне техники как махолет).
В одном из вариантов реализации настоящего изобретения корпус 210 любого из самоходных модулей 200, входящих в состав системы 500-2, показанной на фиг. 2, может представлять собой остов или несущую раму, на которой закреплена обшивка или которая может быть по меньшей мере частично окружена оболочкой.
В иных вариантах реализации настоящего изобретения корпус 210 может быть дополнительно снабжен оперением, крылом или крыльями, воздушным винтом или воздушными винтами, гребным винтом или грибными винтами, по меньшей мере одной силовой установкой, гребным колесом или гребными колесами, по меньшей мере одним колесом, гусеничным шасси и/или т.п. в зависимости от области пространства, в которой предполагается сформировать трехмерный объект в соответствии с заданной моделью трехмерного объекта.
В другом варианте реализации настоящего изобретения корпус 210 по меньшей мере одного из самоходных модулей 200, входящих в состав системы 500-2, показанной на фиг. 2, или каждого из них может быть выполнен из металла, пластика, композитного материала (например, из композитных сэндвич-пан елей), алюминиевого материала (например, из алюминиевых сэндвич-панелей), титанового материала (например, из сэндвич-панелей из титана) или любого иного подходящего материала, известного в уровне техники, в том числе с использованием любого подходящего сочетания перечисленных материалов (например, сэндвич панель из титана с алюминиевым сотовым сердечником). Материал изготовления корпуса 210 в любом из самоходных модулей 200, входящих в состав системы 500-2, никак конкретно не ограничен в настоящем изобретении.
В некоторых вариантах реализации настоящего изобретения корпус 210 по меньшей мере одного из самоходных модулей 200, входящих в состав системы 500-2, показанной на фиг. 2, или каждого из них может быть дополнительно снабжен шасси (не показано), которое по сути представляет собой систему опор, которая может быть необходима по меньшей мере для размещения указанного самоходного модуля 200 в одной из парковочных станций 100, или представляет собой по меньшей мере одну опору, которой снабжен корпус 210. В частности, шасси самоходного модуля 200 может иметь полозковый тип, колесный тип, гусеничный тип, поплавковый тип или любой другой тип, известный в уровне техники. Тип, форма, габаритные размеры и материал шасси самоходного модуля 200 никак конкретно не ограничены в рамках настоящего изобретения. Следует отметить, что в данном варианте реализации настоящего изобретения шасси самоходного модуля 200 в зависимости от его конкретного варианта исполнения и области пространства, в которой предполагается сформировать трехмерный объект в соответствии с заданной моделью трехмерного объекта, может по меньшей мере обеспечивать (i) восприятие статического нагружения от собственного веса при стоянке самоходного модуля 200 в одной из парковочных систем 100; и (ii) амортизацию динамических нагрузок, возникающих при посадке самоходного модуля 200 (в том числе аварийной) в одной из парковочных систем 100.
В одном из вариантов реализации настоящего изобретения самоходные модули 200 в системе 500-2 для формирования трехмерного объекта могут и не быть снабжены шасси вообще. В одной из разновидностей такого варианта реализации настоящего изобретения днище корпуса 210 по меньшей мере в одном из самоходных модулей 200, входящих в состав системы 500-2, показанной на фиг. 2, или каждом из них может быть снабжено амортизирующей подложкой (не показана) из упругого материала (например, из резины), которая может быть скреплена с указанным днищем с его наружной стороны, или любой иной подходящей опорой, известной в уровне техники и используемой для самоходных модулей (в частности, для дронов или иных беспилотных летательных аппаратов) в уровне техники.
В другом варианте реализации настоящего изобретения корпус 210 по меньшей мере в одном из самоходных модулей 200, входящих в состав системы 500-2 для формирования трехмерного объекта, показанной на фиг. 2, или каждом из них может быть дополнительно снабжен по меньшей мере одним крылом, по меньшей мере одним колесным шасси (не показаны), по меньшей мере одним гусеничным траком, по меньшей мере одной роботизированной ногой, по меньшей мере одной ластой, по меньшей мере одним плавником, по меньшей мере одним веслом и/или по меньшей мере одним парусом которые могут быть выполнены каждый за одно целое с корпусом 210, может быть прикреплен к корпусу 210 с его наружной стороны или по меньшей мере частично вделан или встроен в корпус 210, при этом указанное вспомогательное приспособление для перемещения самоходного модуля 200 может первоначально находиться в сложенном состоянии или задвинутом состоянии (исходное положение, в котором такое вспомогательное приспособление по меньшей мере частично находится внутри корпуса 210) и может быть выполнено с возможностью его развертывания соответственно в разложенное или выдвинутое состояние (рабочее положение, в котором такое вспомогательное приспособление по меньшей мере частично выходит из внутреннего пространства корпуса 210 за его пределы) под управлением вышеописанного управляющего устройства (не показано), входящего в состав системы 500-2. Следует отметить, что количество таких вспомогательных средств для перемещения самоходного модуля 200, которыми может быть снабжен корпус 210, может быть подобрано с учетом массогабаритных показателей и конструкционных особенностей корпуса 210 для создания дополнительной движущей силы при перемещении самоходного модуля 200, с учетом необходимости в снижении нагрузки на самоходный модуль 200, с учетом заданной области пространства, в которой предполагается сформировать трехмерный объект 300, и/или с учетом необходимости в стабилизации направления движения самоходного модуля 200, то есть по сути зависит от конкретного варианта исполнения такого самоходного модуля 200, который будет использован при формировании трехмерного объекта 300 в заданной области пространства. Следует также отметить, что по меньшей мере одно из таких вспомогательных средств для перемещения самоходного модуля 200, которыми может быть снабжен корпус 210 по меньшей мере в одном из самоходных модулей 200, входящих в состав системы 500-2, может быть выполнено складным, телескопическим, выдвижным или т.п. для уменьшения габаритных размеров указанного самоходного модуля 200 в сложенном состоянии, например в случае, когда он припаркован или размещен в одной из парковочных станций 100, входящих в состав системы 500-2, при этом развертывание указанного вспомогательного средства может осуществляться, например, под управлением управляющего устройства системы 500-2 при выходе (например, при выезде, взлете, выплывании, выползании, выпрыгивании и т.п.) этого самоходного модуля 200 из парковочной станции 100, в которой он был размещен, либо непосредственно в процессе перемещения этого самоходного модуля по воздуху, по суше (земле), по воде и/или под водой.
В ином варианте реализации настоящего изобретения корпус 210 по меньшей мере в одном из самоходных модулей 200 в виде беспилотных летательных аппаратов, входящих в состав системы 500-2 для формирования трехмерного объекта, показанной на фиг. 2, или каждом из них может быть дополнительно снабжен крыльями для создания дополнительной подъемной силы в полете и по меньшей мере одним авиационным двигателем (не показан), а предпочтительно двумя авиационными двигателями, для обеспечения возможности перемещения самоходного модуля 200 по воздуху (в том числе в аварийной ситуации, например в случае повреждения, выхода из строя и/или разрядки самоходного модуля 200, используемого для формирования трехмерного объекта) или повышения скорости перемещения самоходного модуля 200 по воздуху (т.е. обеспечением возможности работы авиационных двигателей в дополнение к движителям 220, используемым для перемещения самоходного модуля 200 по воздуху в стандартной ситуации, или вместо них). Следует отметить, что в качестве каждого такого авиационного двигателя может быть использован, например, винтовой двигатель, реактивный двигатель, комбинированный авиационный двигатель или любой другой подходящий авиационный двигатель, известный в уровне техники. Следует также отметить, что в случае использования в самоходном модуле 200 двух авиационных двигателей их конструкции и/или типы могут совпадать или отличаться друг от друга. Каждый такой авиационный двигатель, которым может быть дополнительно снабжен корпус 210, может работать под управлением блока управления самоходного модуля 200, который может выдавать управляющие команды на драйвер управления двигателем самоходного модуля 200 с обеспечением возможности запуска, остановки или изменения режима работы указанного авиационного двигателя (например, рабочих параметров авиационного двигателя).
В некотором другом варианте реализации настоящего изобретения корпус 210 по меньшей мере одного из самоходных модулей 200 виде беспилотного летательного аппарата, входящих в состав системы 500-2 для формирования трехмерного объекта, показанной на фиг. 2, или каждого из них может быть дополнительно снабжен по меньшей мере одним дополнительным несущим винтом (не показан) или винтовым движителем любого подходящего типа, известного в уровне техники, для обеспечения возможности перемещения самоходного модуля 200 по воздуху (в том числе в аварийной ситуации, например в случае повреждения, выхода из строя и/или полной разрядки самоходного модуля 200, используемого для формирования трехмерного объекта) или повышения скорости перемещения самоходного модуля 200 по воздуху (т.е. обеспечение возможности работы несущего винта или винтового движителя в дополнение к движителям 220, используемым для перемещения самоходного модуля 200 по воздуху в стандартной ситуации, или вместо них). Кроме того, в данном варианте реализации настоящего изобретения корпус 210 в самоходном модуле 200 может дополнительно содержать силовую установку (не показана), которая может быть образована, например, из одного или двух турбовальных двигателей и которая может быть функционально соединена с каждым из несущих винтов самоходного модуля 200 с обеспечением возможности подачи на них мощности для приведения их в действие. Каждая такая силовая установка самоходного модуля 200, функционально соединенная с несущими винтами, которыми может быть дополнительно снабжен корпус 210, с обеспечением передачи на них приводного усилия, может работать под управлением блока управления самоходного модуля 200, который может выдавать управляющие команды на драйвер управления силовой установкой (не показана) с обеспечением возможности запуска, остановки или изменения режима работы указанной силовой установки (например, изменения рабочих параметров силовой установки) для изменения состояния этих несущих винтов.
В других вариантах реализации настоящего изобретения по меньшей мере один из самоходных модулей 200, входящих в состав системы 500-2 для формирования трехмерного объекта, показанной на фиг. 2, или каждый из них может представлять собой беспилотный летательный аппарат (БПЛА), а корпус 210 такого самоходного модуля в виде БПЛА может представлять собой фюзеляж и может быть дополнительно снабжен измерительными датчиками (не показаны) для измерения параметров перемещения или полета самоходного модуля 200. Блок управления самоходного модуля 200 может быть соединен с возможностью обмена данными с измерительными датчиками самоходного модуля 200 и с управляющим устройством системы 500-2 с обеспечением возможности выдачи в реальном времени измеренных параметров полета самоходного модуля 200 на управляющее устройство системы 500-2 и может быть дополнительно выполнен с возможностью приема навигационных команд от управляющего устройства системы 500-2, сгенерированных управляющим устройством системы 500-2 в ответ на указанные измеренные параметры полета самоходного модуля 200. В ответ на навигационные команды, принятые блоком управления самоходного модуля 200 от управляющего устройства системы 500-2, указанный блок управления генерирует и выдает свои управляющие команды, обеспечивающие изменение параметров работы указанного самоходного модуля 200. В частности, в данном варианте реализации настоящего изобретения управляющее устройство системы 500-2 может быть дополнительно выполнено с возможностью выдачи навигационных команд по меньшей мере на один из самоходных модулей 200, входящих в состав системы 500-2, показанной на фиг. 2, или каждый из них для изменения его курса перемещения или полета и/или режима работы в случае, если по меньшей мере один из его параметров полета, измеряемых с помощью вышеописанных измерительных датчиков самоходного модуля 200, не соответствует пороговому значению или выходит за пределы диапазона пороговых значений. Следует отметить, что в качестве измерительных датчиков для измерения параметров полета самоходного модуля 200 могут быть использованы, например, барометрические высотометры, индикаторы воздушной скорости и числа Маха, вариометры, приемники воздушного давления, централизованные системы воздушных сигналов, манометры, тахометры, термометры, системы управления движителями, авиагоризонты, курсовые приборы и автоматы углов атаки и сигнализации перегрузок.
В иных вариантах реализации настоящего изобретения корпус 210 по меньшей мере в одном из самоходных модулей 200, входящих в состав системы 500-2 для формирования трехмерного объекта, показанной на фиг. 2, или каждом из них может быть дополнительно снабжен измерительными датчиками для измерения параметров состояния указанного корпуса 210. Блок управления такого самоходного модуля 200 может быть соединен с возможностью обмена данными с измерительными датчиками самоходного модуля 200 и с управляющим устройством системы 500-2 с обеспечением возможности выдачи в реальном времени указанных измеренных параметров состояния корпуса 210 самоходного модуля на указанное управляющее устройство и может быть дополнительно выполнен с возможностью приема навигационных команд от управляющего устройства системы 500-2, сгенерированных управляющим устройством системы 500-2 в ответ на указанные измеренные параметры состояния корпуса 210 самоходного модуля 200. В ответ на навигационные команды, принятые блоком управления самоходного модуля 200 от управляющего устройства системы 500-2, указанный блок управления выполнен с возможностью генерирования и выдачи своих управляющих команд, обеспечивающих возможность замены указанного самоходного модуля 200 на другой самоходный модуль из самоходных модулей 200, входящих в состав системы 500-2 и размещенных в соответствующих парковочных станциях 100. В частности, в данном варианте реализации настоящего изобретения управляющее устройство системы 500-2 может быть дополнительно выполнено с возможностью выдачи навигационных команд на каждый из самоходных модулей 200, по меньшей мере один из параметров состояния корпуса 210 которого не соответствует пороговому значению или выходит за пределы диапазона пороговых значений, и с возможностью выдачи навигационных команд на другой самоходный модуль 200, размещенный в одной из парковочных станций 100, входящих в состав системы 100, с обеспечением возможности его направления из указанной парковочной станции 100 в область пространства, в которой находится указанный подлежащий замене самоходный модуль 200, для осуществления замены подлежащего замене самоходного модуля 200 на указанный другой самоходный модуль 200. Следует отметить, что в качестве датчиков для измерения параметров состояния корпуса 210 самоходного модуля могут быть использованы, например, датчики вибрации, тензорезисторы, датчики силы и т.п.
В некоторых иных вариантах реализации настоящего изобретения корпус 210 по меньшей мере в одном из самоходных модулей 200, входящих в состав системы 500-2 для формирования трехмерного объекта, показанной на фиг. 2, или каждом из них может быть дополнительно снабжен измерительными датчиками для измерения параметров состояния конструкции указанного самоходного модуля 200, а нижеописанный блок управления (не показан) указанного самоходного модуля 200 может быть соединен с возможностью обмена данными с указанными измерительными датчиками и с управляющим устройством системы 500-2 с обеспечением возможности выдачи в реальном времени указанных измеренных параметров состояния конструкции самоходного модуля 200 на указанное управляющее устройство и может быть дополнительно выполнен с возможностью приема навигационных команд от управляющего устройства системы 500-2, сгенерированных управляющим устройством системы 500-2 в ответ на указанные измеренные параметры состояния конструкции самоходного модуля 200. В ответ на навигационные команды, принятые блоком управления (не показан) самоходного модуля 200 от управляющего устройства системы 500-2, указанный блок управления выполнен с возможностью генерирования и выдачи своих управляющих команд, обеспечивающих возможность замены указанного самоходного модуля 200 на другой самоходный модуль из самоходных модулей 200, входящих в состав системы 500-2 и размещенных в соответствующих парковочных станциях 100. В частности, в данном варианте реализации настоящего изобретения управляющее устройство системы 500-2 может быть дополнительно выполнено с возможностью выдачи навигационных команд на каждый из самоходных модулей 200, по меньшей мере один из параметров состояния конструкции которого не соответствует пороговому значению или выходит за пределы диапазона пороговых значений, и с возможностью выдачи навигационных команд на другой самоходный модуль, размещенный в одной из парковочных станций 100, входящих в состав системы 100, с обеспечением возможности его направления из указанной парковочной станции 100 в область пространства, в которой находится указанный подлежащий замене самоходный модуль 200, для осуществления замены подлежащего замене самоходного модуля 200 на указанный другой самоходный модуль 200. Следует отметить, что в качестве датчиков для измерения параметров состояния конструкции самоходного модуля могут быть использованы, например, датчики вибрации, тензорезисторы, датчики силы и т.п.
В некоторых вариантах реализации настоящего изобретения корпус 210 по меньшей мере в одном из самоходных модулей 200, входящих в состав системы 500-2 для формирования трехмерного объекта, показанной на фиг. 2, или каждом из них может представлять собой каркас (т.е. остов из скрепленных или соединенных между собой несущих конструктивных элементов, который не снабжен ни крышей, ни стенами, ни полом), на котором смонтированы или установлены по меньшей мере блок управления (не показан) самоходного модуля 200, движители 220, дополнительные функциональные устройства, описанные в данном документе и устанавливаемые в самоходном модуле 200, и/или т.п.
Блок управления (не показан), входящий в состав каждого из самоходных модулей 200, показанных на фиг. 2, может представлять собой совокупность аппаратных и программных средств, обеспечивающих выполнение заданных функциональных возможностей, описанных в данном документе. В частности, блок управления самоходного модуля 200 может представлять собой процессорное или вычислительное устройство, выполненное с возможностью получения доступа к управляющим программным инструкциям с обеспечением возможности их исполнения для осуществления релевантных функциональных возможностей, описанных в данном документе в отношении самоходных модулей 200.
Кроме того, блок управления (не показан) по меньшей мере в одном из самоходных модулей 200, входящих в состав системы 500-2 для формирования трехмерного объекта, показанной на фиг. 2, или каждом из них может быть выполнен с возможностью получения доступа к управляющим программным инструкциям с обеспечением возможности их исполнения для осуществления одной из следующих операций: (i) управление работой самоходного модуля 200 в полностью автоматическом режиме (автопилот), (ii) управление работой самоходного модуля 200 в полуавтоматическом режиме, предусматривающем получение по меньшей части управляющих команд от оператора, который может находиться в удаленном пункте управления (например, в мобильном или стационарном пункте управления движением самоходных модулей) и который может вводить указанные управляющие команды посредством по меньшей мере одного из устройств ввода команд, входящих в состав органов управления в указанном пункте управления, или (iii) управление работой самоходного модуля 200 в автоматическом режиме при получении по меньшей части управляющих команд от внешнего источника управления (например, от управляющего устройства, входящего в состав системы 500-2, одной из парковочных станций 100, управляющего устройства, входящего в состав другой системы для формирования трехмерного объекта, аналогичной системе 500-2, спутника, диспетчерской вышки и/или т.п.) по каналу беспроводной передачи данных, установленному между указанным блоком управления самоходного модуля 200 и указанным внешним источником управления.
По меньшей мере один из самоходных модулей 200, входящих в состав системы 500-2 для формирования трехмерного объекта, показанной на фиг. 2, или каждый из них может быть направлен или перемещен по воздуху, по суше (земле), по воде, под водой и/или по поверхности подвижного или неподвижного физического объекта, находящегося по меньшей мере частично по меньшей мере в одном из указанных пространств (т.е. в воздухе, на суше (земле) на воде и/или под водой) под управлением блока управления (не показан) этого самоходного модуля 200 из одной из парковочных станций 100 в конкретную географическую область или заданную область пространства как в автоматическом режиме (автопилот без вмешательства оператора) в ответ на управляющие или навигационные команды указанного блока управления или одного из вышеописанных внешних источников управления (например, управляющего устройства системы 500-2), так и в полуавтоматическом режиме (автопилот с вмешательством оператора) в ответ на управляющие команды оператора, введенные указанным оператором с помощью вышеописанных органов управления, находящихся в удаленном пункте управления (не показан). Другими словами, возможен случай, когда решение о направлении или перемещении каждого из самоходных модулей 200, входящих в состав системы 500-2, в отдельности в конкретную географическую область или заданную область пространства, может быть принято оператором этого самоходного модуля 200, который может выдать, посредством вышеописанных органов управления, в блок управления самоходного модуля 200 соответствующую управляющую команду, сформированную оператором с помощью указанных органов управления путем выбора одной из предварительно заданных областей пространства, доступных для визуализации в них заданного трехмерного объекта, или путем задания координат указанной области пространства, при этом указанная область пространства может находиться рядом с одной или более из парковочных станций 100, входящих в состав системы 500-2.
Следует отметить, управление перемещением или движением каждого из самоходных модулей 200, входящих в состав системы 500-2, может быть осуществлено, например, с использованием стандартных программно-аппаратных средств, используемых в уровне технике для управления самоходными модулями, подобными самоходным модулям 200, и поставляемых вместе с такими самоходными модулями 200. В частности, в качестве самоходных модулей 200 могут быть использованы имеющиеся на рынке самоходные модули 200 любого типа и любой модификации, снабженные встроенной функцией автопилота и/или встроенной функцией дистанционного ручного или автоматического управления.
Блок управления (не показан) в любом из самоходных модулей 200, входящих в состав системы 500-2 для формирования трехмерного объекта, может содержать один или несколько интерфейсов передачи данных для отправки и/или получения сигналов/команд/запросов/инструкций. Следует отметить, что сами интерфейсы передачи данных, базы данных и иное аппаратное обеспечение могут либо входить в состав указанного блока управления, либо могут быть реализованы в виде отдельных модулей или блоков, соединенных с указанным блоком управления с возможностью обмена данными.
В настоящем изобретении по меньшей мере один блок управления (не показан) в каждом из самоходных модулей 200, входящих в состав системы 500-2 для формирования трехмерного объекта, показанной на фиг. 2, или каждом из них может быть соединен по сети связи (не показана) с внешним источником управления в виде вышеописанного управляющего устройства, входящего в состав системы 500-2, с обеспечением возможности обмена с ним данными. В частности, блок управления (не показан) такого самоходного модуля 200 может быть предварительно запрограммирован обмениваться данными с управляющим устройством системы 500-2 для получения или приема от него управляющих или навигационных команд и может быть предварительно запрограммирован исполнять указанные принятые навигационные или управляющие команды для обеспечения надлежащего функционирования указанного самоходного модуля 200 в соответствии с поставленной задачей, в частности для изменения параметров работы такого самоходного модуля 200, изменения направления перемещения (в частности, перемещения по воздуху, по суше (земле), по воде, под водой и/или по поверхности физического объекта, находящегося в фиксированном положении (стационарный физический объект) или перемещающегося по меньшей мере частично по воздуху, по суше (земле), по воде и/или под водой (подвижный физический объект)) такого самоходного модуля 200, изменения или смещения пространственного местоположения такого самоходного модуля 200, изменения пространственной ориентации такого самоходного модуля 200 и/или т.п.
В частности, блок управления в каждом из самоходных модулей 200, соединенных с управляющим устройством системы 500-2 с возможностью обмена данными, может содержать процессор, выполненный с возможностью исполнения машиночитаемых управляющих команд или навигационных команд в автоматическом режиме или по меньшей мере частично на основе команд, принимаемых от оператора или иного внешнего источника управления по меньшей мере по одному каналу беспроводной связи.
Таким образом, в настоящем изобретении управляющее устройство (не показано), которое входит в состав системы 500-2 и которое соединено с возможностью обмена данными с самоходными модулями 200, входящими в состав системы 500-2, по сути выполнено с возможностью направления всех таких самоходных модулей 200 или по меньшей мере части из них по меньшей мере из одной парковочной станции из числа парковочных станций 100, входящих в состав системы 500-2, в область пространства, ограниченную или заданную конкретными географическими координатами, с обеспечением возможности размещения каждого из указанных направленных самоходных модулей 200 в заданном пространственном местоположении в соответствии с заданной моделью трехмерного объекта по меньшей мере частично в воздухе, на суше (земле), на воде и/или под водой. В частности, в настоящем изобретении возможен случай, в котором одна часть из самоходных модулей 200, используемых для формирования трехмерного объекта в соответствии с заданной моделью трехмерного объекта, размещена на поверхности земли (на суше) или поверхности воды (на воде), а другая часть из указанных самоходных модулей 200 размещена в воздухе или под водой. Кроме того, в настоящем изобретении возможен случай, в котором первая часть из самоходных модулей 200, используемых для формирования трехмерного объекта в соответствии с заданной моделью трехмерного объекта, размещена на поверхности земли (на суше) или поверхности воды (на воде), вторая часть из указанных самоходных модулей 200 размещена в воздухе, а третья часть из указанных самоходных модулей 200 размещена под водой. Кроме того, в настоящем изобретении возможен случай, в котором первая часть из самоходных модулей 200, используемых для формирования трехмерного объекта в соответствии с заданной моделью трехмерного объекта, размещена на поверхности земли (на суше), вторая часть из указанных самоходных модулей 200 размещена в воздухе, третья часть из указанных самоходных модулей 200 размещена под водой, а четвертая часть из указанных самоходных модулей 200 размещена на поверхности воды (на воде). Следует отметить, что в настоящем изобретении самоходные модули 200, размещенные в своих пространственных местоположениях в соответствии с заданной моделью трехмерного объекта в заданной области пространства, в которую эти самоходные модули 200 переместились от ответ на соответствующие навигационные команды управляющего устройства системы 500-2 для формирования трехмерного объекта, могут быть по меньшей мере частично соединены или скреплены друг с другом и/или могут по меньшей мере частично не контактировать или не взаимодействовать друг с другом. В одном из вариантов реализации настоящего изобретения самоходные модули 200, размещенные в своих пространственных местоположениях в соответствии с заданной моделью трехмерного объекта в заданной области пространства для формирования трехмерного объекта, могут быть все соединены или скреплены друг с другом или могут находиться на заданном расстоянии друг от друга без какого-либо физического контакта или физического взаимодействия друг с другом.
Модель трехмерного объекта, используемая для формирования трехмерного объекта в заданной области пространства, в которую направляют по меньшей мере часть из самоходных модулей 200, входящих в состав системы 500-2, может быть приведена в соответствие с заданной областью пространства, в частности может задаваться автоматически в зависимости от предварительно заданной или выбранной пользователем области пространства, в которой необходимо формировать трехмерный объект. В качестве альтернативы модель трехмерного объекта может быть выбрана или задана пользователем отдельно от области пространства, в которой необходимо формировать трехмерный объект, с использованием, например, вышеописанного пользовательского устройства. Следует также отметить, что каждое из пространственных местоположений, соответствующих конкретной модели трехмерного объекта, имеет заданные географические или пространственные координаты, заданное расстояние от поверхности земли, воды или иного физического объекта, на поверхности которого могут быть размещены самоходные модули при формировании указанного трехмерного объекта, а также имеет иные параметры, известные в уровне техники и дополнительно характеризующие указанное пространственное местоположение. В частности, к параметрам, дополнительно характеризующим каждое из пространственных местоположений, в которых должны быть размещены самоходные модули 200 при формировании трехмерного объекта, может относиться заданное пространственное смещение (т.е. смещение по меньшей мере по одной из трех координатных осей, в частности по одной, двум или сразу трем координатным осям) каждого из указанных самоходных модулей по отношению ко всем смежным пространственным местоположениям, в которых должны быть размещены остальные самоходные модули 200 в соответствии с конкретной моделью трехмерного объекта, т.е. по отношению ко всем смежным самоходным модулям (например, по отношению к их предварительно определенному геометрическому центру), используемым для формирования трехмерного объекта, при этом смежными самоходными модулями 200 следует считать те самоходные модули, которые должны находиться рядом друг с другом по меньшей мере в одной из трех пространственных измерений при их размещении в заданной области пространства в соответствии с заданной моделью трехмерного объекта. Кроме того, к параметрам, дополнительно характеризующим каждое из пространственных местоположений, в которых должны быть размещены самоходные модули 200 при формировании трехмерного объекта, может относиться заданное пространственное смещение (т.е. смещение по меньшей мере по одной из трех координатных осей, в частности по одной, двум или сразу трем координатным осям) каждого их указанных самоходных модулей 200 по отношению к опорному (референтному) пространственному местоположению или опорному (референтному) самоходному модулю (например, по отношению к его предварительно определенному геометрическому центру), при этом по меньшей мере один из трехмерных объектов может быть сформирован с использованием только одного опорного самоходного модуля или нескольких (двух и более) опорных самоходных модулей, каждый из которых может соответствовать, например, одному из вертикальных или горизонтальных рядов в составе этого трехмерного объекта, одной из частей этого трехмерного объекта или т.п. Кроме того, к параметрам, дополнительно характеризующим каждое из пространственных местоположений, в которых должны быть размещены самоходные модули 200 при формировании трехмерного объекта, может относится заданное пространственное смещение (т.е. смещение по меньшей мере по одной из трех координатных осей, в частности по одной, двум или сразу трем координатным осям) каждого их указанных самоходных модулей 200 по отношению к опорной (референтной) трехмерной конструкции, которая может по меньшей мере частично находиться на воде, под водой, в воздухе и/или на суше (на земле), т.е. пространственное смещение каждого из указанных самоходных модулей может быть задано по отношению по меньшей мере к одному из опорных (референтных) пространственных местоположений, которые могут ограничивать или задавать, например, контур указанной трехмерной конструкции.
Модель трехмерного объекта содержит по меньшей мере данные типах и/или технических характеристиках самоходных модулей 200, которые могут быть использованы для ее реализации (то есть самоходных модулей 200, которые предполагается использовать для формирования трехмерного объекта тем или ином образом при реализации такой модели трехмерного объекта), данные о форме, размерах и/или геометрии трехмерного (3D) объекта, который может быть сформирован на суше (земле), в воздухе, на воде и/или под водой при надлежащем размещении самоходных модулей 200 в своих пространственных местоположениях в соответствии с указанной моделью трехмерного объекта, а также данные о взаимном расположении самоходных модулей 200 в заданной области пространства при формировании трехмерного объекта на суше (земле), в воздухе, на воде и/или под водой в соответствии с указанной моделью трехмерного объекта, данные о пространственных местоположениях, которые должны занять самоходные модули 200 для формирования трехмерного объекта на суше (земле), в воздухе, на воде и/или под водой, данные о взаимном положении самоходных модулей 200 в составе формируемого в воздухе трехмерного объекта, данные об особенностях местности, в которой может быть сформирован трехмерный объект на суше (земле), в воздухе, на воде и/или под водой в соответствии с указанной моделью трехмерного объекта, данные о свободном пространстве, требуемом или необходимом для формирования трехмерного объекта на суше (земле), в воздухе, на воде и/или под водой в соответствии с указанной моделью трехмерного объекта, и/или т.п.
Кроме того, модель трехмерного объекта может предполагать непрерывное или периодическое перемещение трехмерного объекта, формируемого на суше (земле), в воздухе, на воде и/или под водой с использованием самоходных модулей 200, по отношению к области пространства, в которой указанных трехмерный объект был первоначально сформирован в соответствии с заданной моделью трехмерного объекта. Кроме того, модель трехмерного объекта может предполагать непрерывное или периодическое перемещение по меньшей мере одной части или нескольких частей трехмерного объекта, формируемого в воздухе с использованием самоходных модулей 200, в области пространства, в которой указанный трехмерный объект был первоначально сформирован, или по отношению к этой области пространства.
Кроме того, блок управления (не показан) в каждом из самоходных модулей 200, входящих в состав системы 500-2 для формирования трехмерного объекта, показанной на фиг. 2, может иметь доступ к одной или нескольким локальным или удаленным базам данных (не показаны), измерительным устройствам или датчикам (не показаны), установленным с внешней стороны корпуса 210 и/или внутренней стороны корпуса 210, бортовым системам контроля и управления, входящим состав указанного самоходного модуля 200, и/или любым иным подходящим функциональным устройствам, узлам или блокам, использованием которых известно в уровне технике в отношении всевозможных вариантов реализации самоходных модулей и которые могут быть установлены в корпусе 210 или на нем, в том числе к тем функциональным устройствам, которые описаны в настоящем документе.
Блоку управления (не показан) по меньшей мере в одном из самоходных модулей 200, входящих в состав системы 500-2 для формирования трехмерного объекта, показанной на фиг. 2, или каждом из них могут быть первоначально сообщены по меньшей мере следующие данные, используемые этим блоком управления при осуществлении своих функций: (а) географические координаты каждой из областей пространства, в которых могут быть сформированы трехмерные объекты; (b) трехмерные объекты, которые могут быть сформированы с использованием по меньшей мере части из самоходных модулей 200, входящих в состав системы 500-2; и (с) модели трехмерного объекта, каждая из которых поставлена в соответствие с одним из формируемых трехмерных объектов и каждая из которых предусматривает размещение самоходных модулей 200 в заданных пространственных местоположениях по отношению друг к другу. Следует отметить, что вышеуказанные данные могут быть сообщены блоку управления самоходного модуля 200 путем их ввода вручную оператором с обеспечением их записи в локальную базу данных самоходного модуля 200, путем их передачи в виде пакета данных от внешнего источника управления (например, от управляющего устройства, входящего в состав системы 500-2) по каналу беспроводной передачи данных, установленному между блоком управления самоходного модуля 200 и этим внешним источником управления, или могут быть получены модулем связи самоходного модуля 200 из удаленного хранилища данных (например, из сайта, базы данных, сервера данных и т.п.), к которому этот модуль связи может иметь доступ, в ответ на запрос, полученный от модуля связи самоходного модуля 200, или т.п.
При формировании трехмерного (3D) объекта с использованием самоходных модулей 200, направленных управляющим устройством системы 500-2 с обеспечением их надлежащего размещения в заданной области пространства в соответствии с заданной моделью трехмерного объекта, по меньшей мере один из указанных направленных самоходных модулей 200 в ответ на навигационные команды от указанного управляющего устройства может входить в разъемное взаимодействие по меньшей мере с одним другим беспилотным летательным аппаратом из указанных направленных самоходных модулей 200, используемых для формирования указанного объекта. Таким образом, самоходные модули 200, которые при формировании трехмерного объекта в соответствии с заданной моделью трехмерного объекта входят в разъемное взаимодействие друг друга, должны быть снабжены каждый средствами взаимодействия или по меньшей мере одним средством взаимодействия для обеспечения возможности разъемного взаимодействия друг с другом при формировании требуемого трехмерного объекта в воздухе, на воде, под водой и/или на суше (земле), при этом любой из таких взаимодействующих между собой самоходных модулей 200 может входить во взаимодействие по меньшей мере с одним другим самоходным модулем 200 (например, с одним, двумя, тремя, четырьмя, пятью, шестью, семью, восемью, девятью, десятью, одиннадцатью, двенадцатью и большим количеством других самоходных модулей 200).
В качестве альтернативы при формировании трехмерного (3D) объекта с использованием самоходных модулей 200, направленных управляющим устройством системы 500-2, с обеспечением их надлежащего размещения в заданной области пространства в соответствии с заданной моделью трехмерного объекта, каждый из указанных направленных самоходных модулей 200 в ответ на навигационные команды от указанного управляющего устройства может занимать и поддерживать в течение заданного периода времени строго заданное пространственное положение, в котором этот самоходный модуль 200 физически не взаимодействует или физически не контактирует ни с одним из остальных самоходных модулей 200, используемых для формирования указанного объекта на суше (земле), в воздухе, на воде и/или под водой. В таком альтернативном варианте реализации настоящего изобретения по меньшей мере один из самоходных модулей 200, направленных управляющим устройством системы 500-2 в заданную область пространства для формирования трехмерного объекта, или каждый из них могут дополнительно содержать по меньшей мере один сенсор обнаружения препятствий (например, лидар, У3-датчик, ИК-сенсор, радар, видеосенсор и т.п.), по меньшей мере один сенсор позиционирования (например, гиросенсор, GPS, Глонасс, радар и т.п.) и/или иные аналогичные сенсоры для предотвращения столкновений такого самоходного модуля 200 в указанной области пространства с другими самоходными модулями из указанных направленных самоходных модулей 200 в процессе формирования требуемого трехмерного объекта и/или в процессе нахождения указанных самоходных модулей 200 уже в составе сформированного объекта.
В качестве еще одной альтернативы при формировании трехмерного (3D) объекта с использованием самоходных модулей 200, направленных управляющим устройством системы 500-2, с обеспечением их надлежащего размещения в заданной области пространства в соответствии с заданной моделью трехмерного объекта, по меньшей мере один из указанных направленных самоходных модулей 200 в ответ на соответствующие навигационные команды от указанного управляющего устройства может входить в разъемное взаимодействие по меньшей мере с одним другим самоходным модулем из указанных направленных самоходных модулей 200, а по меньшей мере один другой из указанных направленных самоходных модулей 200 может занимать свое пространственное местоположение на заданном расстоянии от остальных самоходных модулей из указанных направленных самоходных модулей 200 (т.е. может не входить в какой-либо физический контакт или какое-либо физическое взаимодействие по меньшей мере с одним из таких остальных самоходных модулей 200).
Неограничивающими примерами средств для обеспечения разъемного взаимодействия самоходных модулей 200 друг с другом при формировании трехмерного объекта являются следующие соединительные элементы, которыми должен быть снабжен корпус 220 по меньшей мере одного из указанных взаимодействующих самоходных модулей 200 в соответствующих стыковочных местах: различные подходящие механические соединительные или крепежные средства (кронштейны, захваты, крепежи, монтажные пазы, зацепы, крюки, защелки, соединения типа выступ-паз и т.д.), электромеханические средства под управлением блока управления (например, электромеханические средства стыковки для стыковки ответным пристыковываемым элементом, электромеханические средства захвата для захвата ответного захватываемого элемента, или т.п.), электромагнитные средства под управлением блока управления, магнитные средства, вакуумные захваты под управлением блока управления и/или т.д. Следует отметить, что если первый самоходный модуль 200 из двух взаимодействующих между собой самоходных модулей 200 снабжен любым соединительным элементом из вышеперечисленных механических соединительных или крепежных средств, электромеханических средств, электромагнитных средств, магнитных средств и вакуумных захватов, то второй самоходный модуль 200 из указанных двух взаимодействующих между собой самоходных модулей 200 для разъемного взаимодействия с первым самоходным модулем 200 должен быть снабжен ответным соединительным элементом подходящего типа, обеспечивающим возможность формирования разъемного соединения с соединительным элементом первого самоходного модуля 200.
В одном из вариантов реализации настоящего изобретения средства для обеспечения разъемного взаимодействия самоходных модулей 200 друг с другом при формировании трехмерного объекта могут быть выполнены в виде вышеописанных соединительных или крепежных средств, при этом крепежные средства по меньшей мере в одном из указанных взаимодействующих между собой самоходных модулей 200 могут быть выполнены с возможностью их развертывания, раскладывания и/или раздвижения для обеспечения возможности взаимного разъемного соединения указанных самоходных модулей 200 друг с другом. В одной из разновидностей данного варианта реализации настоящего изобретения крепежные средства в самоходных модулях 200, входящих в разъемное взаимодействие друг с другом при формировании трехмерного объекта, могут быть выполнены с возможностью их выдвижения из корпуса 210 по меньшей мере одного из указанных взаимодействующих между собой самоходных модулей 200 или их корпусов 201 для обеспечения возможности разъемного соединения указанных самоходных модулей 200 между собой при формировании трехмерного объекта.
В некоторых вариантах реализации настоящего изобретения система 500-2 для формирования трехмерного объекта, показанная на фиг. 2, может дополнительно содержать стационарную или подвижную конструкцию (не показана), выполненную с возможностью размещения на ней или в ней самоходных модулей 200, направленных управляющим устройством в указанную область пространства, с обеспечением формирования трехмерного объекта. Следует отметить, что такая стационарная или подвижная конструкция может быть выполнена, например, решетчатой, ячеистой, сотовой и т.п. и может иметь любую подходящую форму, известную в уровне техники, например может быть выполнена фигурной, при этом такая вспомогательная конструкция может быть размещена или может осуществлять перемещение по суше (земле), в воздухе, по воде и/или под водой. Таким образом, в данном варианте реализации настоящего изобретения стационарная или динамическая конструкция может лежать в основе трехмерного объекта, формируемого из самоходных модулей 200, т.е. может составлять часть указанного трехмерного объекта и может быть предварительно предусмотрена по меньшей мере в одной из заданных моделей трехмерного объекта, которые могут быть использованы для формирования трехмерных объектов, при этом самоходные модули 200, задействованные в формировании трехмерного объекта, могут быть размещены в своих пространственных местоположениях по отношению к указанной вспомогательной конструкции, а по меньшей мере часть из указанных задействованных самоходных модулей 200 могут входить в разъемное взаимодействие или разъемный контакт с указанной вспомогательной конструкцией в соответствующих стыковочных местах. В одной из разновидностей данного варианта реализации такая стационарная или подвижная конструкция системы 500-2 может быть снабжена посадочными площадками, выполненными с возможностью размещения на них по меньшей мере части из самоходных модулей 200, направленных управляющим устройством системы 500-2 в заданную область пространства, при формировании трехмерного объекта. В другой разновидности данного варианта реализации настоящего изобретения стационарная или подвижная конструкция системы 500-2 может быть снабжена крепежными средствами, выполненными с возможностью взаимодействия по меньшей мере с частью из самоходных модулей 200, направленных управляющим устройством системы 500-2 в заданную область пространства, при формировании трехмерного объекта. Еще в одной разновидности данного варианта реализации настоящего изобретения по меньшей мере один из самоходных модулей 200, направленных управляющим устройством системы 500-2 в заданную область пространства для формирования трехмерного объекта, или каждый из них может быть снабжен крепежными средствами, выполненными с возможностью взаимодействия со стационарной или подвижной конструкцией системы 500-2 при формировании указанного трехмерного объекта.
Кроме того, корпус 210 в каждом из самоходных модулей 200, входящих в состав системы 500-2, показанной на фиг. 2, снабжен одним или более бортовыми источниками питания (не показаны), каждый из которых может представлять собой одну или более аккумуляторных батарей и которые могут быть установлены на корпусе 210 или внутри него. Следует отметить, что движители 220 в каждом из самоходных модулей 200, входящих в состав системы 500-2, показанной на фиг. 2, электрически соединены с источником питания (не показан) для приведения их в действие с обеспечением возможности перемещения самоходного модуля 200 по меньшей мере частично по воздуху, по суше (земле), по воде и/или под водой.
В одном из вариантов реализации настоящего изобретения корпус 210 по меньшей мере в одном из самоходных модулей 200, входящих в состав системы 500-2, показанной на фиг. 2, или в каждом из них может содержать два и более отдельных или электрически связанных между собой бортовых источников питания, каждый из которых содержит одну или более аккумуляторных батарей. В другом варианте реализации настоящего изобретения источник питания (не показан) по меньшей мере в одном из самоходных модулей 200, входящих в состав системы 500-2, или в каждом из них может представлять собой по меньшей мере одно из группы, содержащей: генератор на основе двигателя внутреннего сгорания, генератор на основе водородного двигателя, солнечную батарею и любой иной подходящий источник энергии, который известен в уровне техники и который может быть размещенный на корпусе 210 самоходного модуля или внутри него. Еще в одном варианте реализации настоящего изобретения источник питания (не показан) по меньшей мере в одном из самоходных модулей 200, входящих в состав системы 500-2, или в каждом из них может быть выполнен с возможностью его подключения к внешнему источнику питания (не показан), например, к электрической сети.
Таким образом, при размещении любого из разряженных самоходных модулей 200, входящих в состав системы 500-2 для формирования трехмерного объекта, показанной на фиг. 2, в одной из парковочных станций 100, входящих в состав системы 500-2, источник питания указанного самоходного модуля 200 может быть подключен к источнику питания указанной парковочной станции 100 с использованием зарядного устройства (не показано) этой парковочной станции 100, электрически соединенного с указанным источником питания парковочной станции 100, с обеспечением зарядки или восполнения запаса хода указанного разряженного самоходного модуля 200.
Другими словами, управляющее устройство системы 500-2 может быть дополнительно выполнено с возможностью направления по меньшей мере одного из разряженных самоходных модулей, относящихся к совокупности самоходных модулей 200, используемых для формирования трехмерного объекта, или каждого из них по меньшей мере на одну из парковочных станций 100, входящих в состав системы 500-2, с обеспечением возможности его подключения к одному из зарядных устройств, которыми может быть снабжена указанная парковочная станция 100, для зарядки или восполнения запаса хода указанного разряженного самоходного модуля. Кроме того, при расформировании трехмерного объекта управляющее устройство системы 500-2 также может быть дополнительно выполнено с возможностью направления одного или более из самоходных модулей 200, которые были использованы для формирования указанного трехмерного объекта в воздухе, на суше (земле), на воде и/или под водой, или каждого из них по меньшей мере на одну из парковочных станций 100, входящих в состав системы 500-2, с обеспечением возможности подключения каждого из указанных направленных самоходных модулей 200 к соответствующему одному из зарядных устройств, которыми может быть снабжена указанная парковочная станция 100, при размещении направленного самоходного модуля 100 в указанной парковочной станции 100 или на ней, что позволяет зарядить или восполнить запас хода указанного самоходного модуля 200. Кроме того, управляющее устройство системы 500-2 может быть дополнительно выполнено с возможностью выдачи навигационных команд на один или более из самоходных модулей 200, использованных для формирования трехмерного объекта, или на каждый из них по истечению заданного периода времени с обеспечением возможности направления указанных самоходных модулей 200 на соответствующие парковочные станции 100 из числа парковочных станций 100, входящих в состав системы 500-2, в том числе для их зарядки или восполнения их запаса хода вышеописанным образом.
Следует отметить, что любой из источников питания в любом из самоходных модулей 200, входящих в состав системы 500-2 для формирования трехмерного объекта, показанной на фиг. 2, может быть использован не только для подачи энергии питания на движители 220 указанного самоходного модуля 200 для его перемещения по меньшей мере частично по воздуху, по суше (земле), по воде и/или под водой, но и для подачи питания на блок управления (не показан) этого самоходного модуля 200, различные датчики и измерительные устройства, используемые в этом самоходном модуле 200 и описанные в данном документе, и на иные управляемые компоненты и/или электронные компоненты, используемые в самоходном модуле 200 и описанные в данном документе, однако специалисту в данной области техники должно быть очевидно, что указанные компоненты могут иметь каждый и свой источник питания, установленный каждый внутри корпуса соответствующего компонента.
В одном из вариантов реализации настоящего изобретения по меньшей мере одна из парковочных станций 100, входящих в состав системы 500-2 для формирования трехмерного объекта, может быть снабжена одним или более зарядными устройствами, выполненными каждый, например, в виде устройства для подачи электрической энергии, устройства для подачи жидкого или газообразного топлива и/или подобного устройства для восполнения запаса хода самоходного модуля 200, а по меньшей мере два самоходных модуля из самоходных модулей 200, входящих в состав системы 500-2, могут быть выполнены с возможностью последовательного или параллельного функционального соединения друг с другом (например, электрически и/или посредством линии для подачи топлива) при размещении в указанной парковочной станции 100 или на ней с обеспечением возможности их подключения по меньшей мере к одному из указанных зарядных устройств этой парковочной станции 100 для их по существу одновременной зарядки (например, зарядки или дозарядки аккумуляторных батарей в таких самоходных модулях 200) и/или по существу одновременного восполнения их запаса хода (например, зарядки аккумуляторных батарей в таких самоходных модулях 200 и/или дозаправки топливом топливных баков в таких самоходных модулях 200, гидравлически соединенных с соответствующими двигателями, входящими в основу генераторов, использованных в этих самоходных модулях 200).
Кроме того, по меньшей мере один из самоходных модулей 200, входящих в состав системы 500-2, или каждый из них может дополнительно содержать по меньшей мере один из следующих сенсоров: сенсор обнаружения препятствий (лидар, У3-датчик, ИК-сенсор, радар, видеосенсор и т.п.), сенсор позиционирования (гиросенсор, GPS, Глонасс, радар и т.п.) и иные подходящие сенсоры, известные в уровне техники, при этом каждый из указанных сенсоров может быть выполнен с возможностью выдачи своих показаний в реальном времени на блок управления (не показан) указанного самоходного модуля 200 и/или управляющее устройство системы 500-2. Кроме того, по меньшей мере один из самоходных модулей 200, входящих в состав системы 500-2, или каждый из них может дополнительно содержать датчик уровня заряда батареи, выполненный с возможностью определения запаса заряда батареи самоходного модуля 200 и с возможностью выдачи в реальном времени указанного запаса заряда батареи на блок управления самоходного модуля 200 и/или управляющее устройство системы 500-2.
В ином варианте реализации настоящего изобретения один или более из самоходных модулей 200, входящих в состав системы 500-2, или каждый из них может быть снабжен по меньшей мере одним источником питания и может быть дополнительно выполнен с возможностью выдачи в реальном времени данных о запасе хода на управляющее устройство системы 500-2 и/или блок управления указанного самоходного модуля 200, а управляющее устройство системы 500-2 может быть дополнительно выполнено с возможностью приема в реальном времени данных о запасе хода от указанных самоходных модулей 200 с обеспечением возможности замены по меньшей мере одного из этих самоходных модулей 200 по меньшей мере на один другой самоходный модуль 200 из самоходных модулей 200, размещенных в парковочных станциях 100, входящих в состав системы 500-2, в случае, если запас заряда каждого заменяемого самоходного модуля 200 ниже заданного порогового значения.
В одном из вариантов реализации настоящего изобретения блок управления (не показан) по меньшей мере в одном из самоходных модулей 200, используемых для формирования трехмерного объекта, или в каждом из них может быть выполнен с возможностью приема данных о запасе хода указанного самоходного модуля 200 и может обеспечивать возможность выхода указанного самоходного модуля 200 из взаимодействия по меньшей мере с одним другим беспилотным летательным аппаратом из числа самоходных модулей 200, используемых для формирования трехмерного объекта, в случае, если запас хода указанного самоходного модуля 200 ниже заданного порогового значения (т.е. аккумуляторная батарея самоходного модуля 200 полностью разряжена или имеет недостаточный уровень заряда, меньший заданного порогового значения, и/или в топливном баке самоходного модуля 200 отсутствует топливо или имеется недостаточный объем топлива, меньший заданного порогового значения) с обеспечением возможности его направления на одну из парковочных станций 100, соответствующих заданной области пространства, в которой был сформирован указанный трехмерный объект.
Следует отметить, что в данном варианте реализации настоящего изобретения при размещении на парковочной станции 100 или в ней источник питания (не показан) разряженного самоходного модуля 200 может быть электрически подключен к зарядному устройству, которым может быть снабжена указанная парковочная станция 100, для восполнения запаса хода этого самоходного модуля 200, например путем восполнения заряда аккумуляторной батареи самоходного модуля 200, восполнения топлива в топливном баке самоходного модуля 200, восполнения рабочей среды (жидкой, твердой или газообразной), используемой в генераторе самоходного модуля 200, работающем с использованием указанной рабочей среды, и/или т.п.
Следует также отметить, что в данном варианте реализации настоящего изобретения блок управления (не показан) разряженного самоходного модуля 200 может быть дополнительно выполнен с возможностью выдачи запроса на управляющее устройство системы 500-2 на подзарядку или восполнение запаса хода указанного разряженного самоходного модуля 200. Управляющее устройство системы 500-2 в свою очередь в ответ на запрос о подзарядке или восполнении запаса хода разряженного самоходного модуля 200, полученный от блока управления (не показан) указанного разряженного самоходного модуля 200, может быть дополнительно выполнено с возможностью выдачи запроса на парковочные станции 100, входящие в состав системы 500-2, для установления свободного зарядного устройства, а каждая из парковочных станций 100, входящих в состав системы 500-2, может быть выполнена с возможностью выдачи данных о свободных зарядных устройствах на управляющее устройство системы 500-2 в ответ на указанный запрос для установления свободного зарядного устройства. В ответ на данные о свободных зарядных устройствах от парковочных станций 100, входящих в состав системы 500-2, управляющее устройство системы 500-2 может быть дополнительно выполнено с возможностью выдачи управляющих инструкций на блок управления разряженного самоходного модуля 200 с обеспечением возможности направления указанного разряженного (требующего подзарядки или восполнения запаса хода) самоходного модуля 200 под управлением блока управления самоходного модуля 200 или управляющего устройства системы 500-2 к одному из выявленных свободных зарядных устройств (не показаны) при размещении разряженного самоходного модуля 200 в парковочной станции 100 с указанным свободным зарядным устройством.
В одном из вариантов реализации настоящего изобретения корпуса 220 двух или более самоходных модулей 200, входящих в состав системы 500-2, могут быть дополнительно снабжены каждый модулем определения местоположения (например, GPS-системой, Глонасс-системой, Beidou-системой или любой иной подходящей системой определения местоположения, известной в уровне техники), выполненным с возможностью определения пространственных координат указанного самоходного модуля 200 в реальном времени, и может быть выполнен с возможностью выдачи определенных пространственных координат на управляющее устройство системы 500-2 в реальном времени, а управляющее устройство системы 500-2 в свою очередь может быть дополнительно выполнено с возможностью выдачи навигационных команд по меньшей мере на один из указанных двух и более самоходных модулей 200 в реальном времени для изменения курса перемещения указанного по меньшей мере одного самоходного модуля 200 в случае установления на основании их пространственных координат, что расстояние между указанными по меньшей мере двумя самоходными модулями меньше заданного порогового значения, что предотвращает или исключает возможность столкновения этих самоходных модулей 200 друг с другом при их направлении в заданную область пространства, при их размещении в соответствующих пространственных местоположениях в указанной области пространства в соответствии с конкретной моделью трехмерного объекта, при их возврате из указанной области пространства по меньшей мере в одну из парковочных станций 100, входящих в состав системы 500-2, и/или при их направлении из указанной области пространства в другую (новую) область пространства, в которой предполагается их использовать для формирования нового трехмерного объекта.
В другом варианте реализации настоящего изобретения корпус 220 по меньшей мере в одном из самоходных модулей 200, входящих в состав системы 500-2, показанной на фиг. 2, или в каждом из них может быть дополнительно снабжен устройством обнаружения (не показано), выполненным с возможностью выявления или обнаружения в области или поле действия по меньшей мере одного другого самоходного модуля из самоходных модулей 200, используемых в заданной области пространства для формирования требуемого трехмерного объекта с использованием одного из способов, описанных в данном документе, и выполненным с возможностью определения расстояния до каждого из указанных обнаруженных самоходных модулей 200. В таком варианте реализации настоящего изобретения устройство обнаружения (не показано) может быть дополнительно соединено с блоком управления (не показан) самоходного модуля 200 с возможностью выдачи на него данных об обнаруженных самоходных модулях, попавших в поле или зону действия устройства обнаружения, и данных о расстояниях от обнаруженных самоходных модулей 200 до указанного самоходного модуля 200, а блок управления самоходного модуля 200 в свою очередь может быть дополнительно выполнен с возможностью изменения пространственного местоположения, курса перемещения и/или режима работы указанного самоходного модуля 200 в случае, если расстояние хотя бы до одного из обнаруженных самоходных модулей 200 меньше заданного порогового значения. В качестве альтернативы в настоящем варианте реализации блок управления (не показан) самоходного модуля 200 может быть выполнен с возможностью выдачи данных об обнаруженных самоходных модулях, попавших в поле или зону действия устройства обнаружения, и данных о расстояниях от каждого из обнаруженных самоходных модулей 200 до указанного самоходного модуля 200 на управляющее устройство системы 500-2, а управляющее устройство системы 500-2 в свою очередь может быть дополнительно выполнено с возможностью изменения пространственного местоположения, курса перемещения и/или режима работы указанного самоходного модуля 200 в случае, если расстояние хотя бы до одного из обнаруженных самоходных модулей 200 меньше заданного порогового значения. Следует отметить, что в данном варианте реализации настоящего изобретения в качестве устройства обнаружения (не показано) может быть использована фотокамера, видеокамера, лидар, радар, ИК-сенсор, У3-датчик, RFID-метка и т.п. В одной из разновидностей данного варианта реализации настоящего изобретения устройство обнаружения может быть выполнено в виде устройства фиксации изображений, выполненного с возможностью фиксации изображений в поле или области обзора в реальном времени с обеспечением возможности выявления в указанной области обзора по меньшей мере одного другого самоходного модуля из самоходных модулей 200, используемых в заданной области пространства для формирования требуемого трехмерного объекта с использованием одного из способов, описанных в данном документе, и выполненного с возможностью определения расстояния до каждого из указанных обнаруженных самоходных модулей 200. В данной разновидности варианта реализации настоящего изобретения блок управления самоходного модуля 200 и/или управляющее устройство системы 500-2 могут аналогичным образом обеспечивать возможность изменения пространственного местоположения, курса перемещения и/или режима работы указанного самоходного модуля 200 в случае, если расстояние хотя бы до одного из обнаруженных самоходных модулей 200 меньше заданного порогового значения, при этом в качестве такого устройства фиксации изображений (не показано) может быть использована фотокамера, видеокамера, видеорегистратор, видеорадар или т.п.
Еще в одном варианте реализации настоящего изобретения корпус 220 по меньшей мере одного из самоходных модулей 200, входящих в состав системы 500-2, показанной на фиг. 2, или каждого из них может быть дополнительно снабжен по меньшей мере одним роботизированным захватным манипулятором или захватом (не показан), находящимся под управлением блока управления (не показан) указанного самоходного модуля 200, при этом корпус 210 указанного самоходного модуля 200 может быть дополнительно снабжен устройством фиксации изображений (не показано), выполненным с возможностью фиксации изображений в поле или области обзора в реальном времени с обеспечением возможности выявления в указанной области обзора по меньшей мере одного из самоходных модулей 200, находящихся в заданной области пространства, и дополнительно соединенным с указанным блоком управления с возможностью выдачи на него данных о выявленных самоходных модулях, а блок управления самоходного модуля 200 в свою очередь может быть дополнительно выполнен с возможностью приведения в действие указанного захвата в ответ на указанные данные о выявленных самоходных модулях, полученные от указанного захвата, с обеспечением возможности осуществления разъемного захвата указанного выявленного самоходного модуля 200. Следует отметить, что в данном варианте реализации настоящего изобретения в качестве такого устройства фиксации изображений может быть использована фотокамера, видеокамера, видеорегистратор, видеорадар или т.п. Следует также отметить, что в данном варианте реализации настоящего изобретения к самоходным модулям, захватываемых захватом, могут относиться самоходные модули 200, выпущенные по меньшей мере из одной из парковочных станций 100, входящих в состав системы 500-2, и направленные в заданную область пространства, самоходные модули из парковочных станций, входящих в состав других систем для формирования трехмерного объекта, аналогичных системе 500-2, и/или любые иные самоходные модули, которые могут быть направлены в заданную область пространства для формирования в ней требуемого трехмерного объекта в рамках предлагаемой технологии, описанной в данном документе.
В одном из вариантов реализации настоящего изобретения по меньшей мере два из самоходных модулей 200, входящих в состав системы 500-2, показанной на фиг. 2, могут быть выполнены с возможностью механического соединения друг с другом с образованием составного самоходного модуля. Такие составные самоходные модули выполнены каждый с возможностью разъемного взаимодействия между собой и/или по меньшей мере с одним из остальных самоходных модулей 200. Следует отметить, что такой составной самоходный модуль (не показан), образованный из нескольких (двух и более) самоходных модулей 200, механически соединенных между собой, может быть изначально размещен в собранном или состыкованном состоянии в одной из парковочных станций 100 или же может быть собран из отдельных самоходных модулей 200, направленных из соответствующих парковочных станций 100 в заданную область пространства, уже при нахождении указанных стыкуемых самоходных модулей 200 в указанной области пространства. Следует отметить, что самоходные модули 200, образующие такой составной самоходный модуль (не показан), могут быть механически соединены друг с другом в горизонтальной плоскости и/или вертикальной плоскости с образованием приводимой в движение собственной тягой составной конструкции из соединенных между собой указанных самоходных модулей 200, имеющей любые форму и геометрические размеры, подходящие для взаимодействия такого составного самоходного модуля (не показан) по меньшей мере с одним другим подобным составным самоходным модулем и/или по меньшей мере с одним отдельным самоходным модулем 200, подходящие для свободного размещения такого составного самоходного модуля (не показан) в одной из парковочных станций 100, входящих в состав системы 500-2, и подходящие для свободного перемещения такого составного самоходного модуля (не показан) по меньшей мере частично по воздуху, по суше (земле), по воде и/или под водой в отдельности или в составе уже сформированного трехмерного объекта. Такой составной самоходный модуль (не показан) может реагировать на управляющие или навигационные инструкции/команды как единое целое, т.е. работа самоходных модулей 200 в таком составном самоходном модуле может быть синхронизирована (например, с помощью управляющего устройства системы 500-2 или блока управления одного из самоходных модулей 200, образующих такой составной самоходный модуль). Кроме того, самоходные модули 200, образующие такой составной самоходный модуль (не показан), могут быть электрически соединены друг с другом с образованием единой схемы питания и составного источника питания (например, составной источник питания может быть образован из аккумуляторных батарей соединяемых между собой самоходных модулей 200), подающего питание или питающего все указанные самоходные модули 200 по существу одновременно, что позволяет говорить о запасе хода не каждого такого самоходного модуля 200 в отдельности, а о запасе хода составного самоходного модуля (не показан) в целом. Следует также отметить, что процесс взаимного механического соединения самоходных модулей 200 может быть начат или запущен в ответ на управляющие команды, выданные управляющим устройством системы 500-2 или блоком управления одного из самоходных модулей 200, образующих такой составной самоходный модуль, на указанные самоходные модули 200. Кроме того, взаимное механическое соединение между самоходными модулями 200, образующими составной самоходный модуль (не показан), может быть реализовано как непосредственно между корпусами или телами соединяемых самоходных модулей 200, так и посредством соединительного конструкционного модуля или соединительной конструкции (не показана), с которой могут быть скреплены или соединены указанные соединяемые самоходные модули 200 (например, с использованием крепежных или соединительных средств, известных в уровне техники) и которую указанные соединяемые самоходные модули 200 в совокупности способны переносить или перемещать по воздуху, по суше (земле), по воде и/или под водой. Такая соединительная конструкция может быть выполнена в виде наземной конструкции, с которой соединяемые между собой самоходные модули 200 могут быть скреплены или соединены при ее нахождении на поверхности земли, при этом указанная соединительная конструкция может быть выполнена раздвижной или развертываемой, что позволяет указанным самоходным модулям 200 раздвигать или развертывать указанную соединительную конструкцию на поверхности земли путем приложения к ней тяговых усилий со стороны самоходных модулей 200. Кроме того, такая соединительная конструкция может быть выполнена в виде летательной конструкции, которая выполнена с возможностью независимого перемещения или полета в воздухе и с которой соединяемые между собой самоходные модули 200 могут быть скреплены или соединены при ее нахождении в воздухе или еще на суше (земле), при этом указанная соединительная конструкция может быть выполнена раздвижной или развертываемой, что позволяет указанным самоходным модулям 200 раздвигать или развертывать указанную соединительную конструкцию в воздухе и/или на суше (земле) путем приложения к ней тяговых усилий со стороны самоходных модулей 200. Кроме того, такая соединительная конструкция может быть выполнена в виде надводной или подводной конструкции, которая выполнена с возможностью независимого перемещения или движения по воде или под водой и с которой соединяемые между собой самоходные модули 200 могут быть скреплены или соединены при ее нахождении на поверхности воды или под водой, при этом указанная соединительная конструкция может быть выполнена раздвижной или развертываемой, что позволяет указанным самоходным модулям 200 раздвигать или развертывать указанную соединительную конструкцию на поверхности воды и/или под водой путем приложения к ней тяговых усилий со стороны самоходных модулей 200.
Следует также отметить, что вышеописанный составной самоходный модуль (не показан) может быть образован из самоходных модулей 200, размещенных по меньшей мере из одной парковочной станции из парковочных станций 100, входящих в состав системы 500-2, самоходных модулей 200, направленных в заданную область пространства по меньшей мере из одной из парковочных станций 100, входящих в состав системы 500-2, самоходных модулей 200, находящихся в заданной области пространства в составе сформированного трехмерного объекта, и/или самоходных модулей, выпущенных по меньшей мере из одной из парковочных станций, входящих в состав по меньшей мере одной другой системы для формирования трехмерного объекта, схожей с системой 500-2.
При разрядке или уменьшении запаса хода до заданного предела вышеописанный составной самоходный модуль (не показан), входящий в состав сформированного трехмерного объекта, может быть заменен в воздухе, на воде, под водой и/или на суше (земле) на другой (заряженный) составной самоходный модуль или по меньшей мере один отдельный заряженный самоходный модуль в процессе формирования трехмерного объекта, в процессе размещения указанного разряженного составного самоходного модуля в одной из парковочных станций 100, входящих в состав системы 500-2, в процессе нахождения в составе трехмерного объекта, в процессе расформирования трехмерного объекта или в процессе направления в заданную область пространства. При замене разряженного составного самоходного модуля (не показан) на заряженный составной самоходный модуль или по меньшей мере на один отдельный заряженный самоходный модуль указанный разряженный составной самоходный модуль может быть направлен к одной из парковочных станций 100 для размещения в ней или на ней с обеспечением возможности дальнейшего хранения и/или возможности восполнения запаса хода такого составного самоходного модуля в указанной парковочной станции 100. В качестве альтернативы при замене разряженного составного самоходного модуля (не показан) на заряженный составной самоходный модуль самоходные модули 200, входящие в состав указанного разряженного составного самоходного модуля (не показан), вышедшего из состава трехмерного объекта, сформированного в воздухе, на воде, под водой и/или на суше (земле) в заданной области пространства, могут быть по меньшей мере частично выведены из взаимодействия друг с другом (т.е. могут разлететься в стороны с обеспечением расформирования такого составного самоходного модуля на отдельные самоходные модули 200 или на отдельные составные части указанного составного самоходного модуля) с обеспечением возможности направления каждого из них к соответствующей одной из парковочных станций 100, что позволяет разместить разряженные самоходные модули 200 в парковочных станциях 100 с обеспечением возможности их дальнейшего хранения в этих парковочных станциях 100 и/или возможности восполнения запаса хода по меньшей мере одного из этих разряженных самоходных модулей 200.
Кроме того, по меньшей мере один или каждый из самоходных модулей 200, входящих в состав системы 500-2 и содержащих каждый корпус 210, выполненный с обеспечением возможности размещения такого самоходного модуля 200 в одной из парковочных станций 100, входящих в состав системы 500-2, и управляемые движители 220, установленные или закрепленные на корпусе 210 с обеспечением возможности перемещения самоходного модуля 200 по воздуху, по суше (земле), по воде, под водой и/или по поверхности стационарного или подвижного физического объекта, находящегося по меньшей мере в одном из воздушного пространства, наземного пространства, надводного пространства и подводного пространства, выполнен с возможностью изменения своей формы и/или своего размера. Кроме того, корпус 210 любого из самоходных модулей 200, показанных на фиг. 2-3, снабжен блоком управления (не показан), который соединен с возможностью обмена данными с каждым из движителей 220 и с вышеописанным управляющим устройством системы 500-2, при этом блок управления самоходного модуля 200 дополнительно выполнен с возможностью управления работой указанных движителей 220, в том числе в ответ на навигационные команды или управляющие команды, принимаемые от управляющего устройства системы 500-2, что по сути позволяет управляющему устройству системы 500-2 обеспечивать возможность перемещения указанного самоходного модуля 200 из парковочной станции 100 в заданную область пространства с использованием по меньшей мере одного из движителей 220 этого самоходного модуля 200 и возможность размещения этого самоходного модуля 200 в заданном пространственном местоположении в соответствии с моделью трехмерного объекта для формирования по меньшей мере части заданного трехмерного объекта 300.
Следует отметить, что корпус 210 по меньшей мере одного или каждого из самоходных модулей, показанных на фиг. 2-3, может быть снабжен одним или более управляемыми движителями 200 (например, одним, двумя, тремя, четырьмя, пятью, шестью, семью, восемью, девятью, десятью и большим количеством движителей 220). В качестве альтернативы корпус 210 самоходного модуля, показанного на фиг. 3, может быть снабжен двумя или более управляемыми движителями 200, тремя или более управляемыми движителями 200, четырьмя или более управляемыми движителями 200 и т.п.
Следует также отметить, что каждый из движителей 220 по меньшей мере в одном или каждом из самоходных модулей 200 по фиг. 2-3, входящих в состав системы 500-2 и используемых для формирования трехмерного объекта 300 в заданной области пространства, может обеспечивать возможность перемещения самоходного модуля 200, на корпусе 210 которого указанные движители 220 установлены, воздуху, по суше (земле), по воде, под водой и/или по поверхности стационарного или подвижного физического объекта, находящегося по меньшей мере в одном из воздушного пространства, наземного пространства, надводного пространства и подводного пространства. В одном из вариантов реализации настоящего изобретения по меньшей мере один из самоходных модулей 200, входящих в состав системы 500-2, может быть снабжен только одним движителем 220, выполненным таким образом, что он обеспечивает возможность перемещения указанного самоходного модуля 200 по меньшей мере в одном, по меньшей мере в двух, по меньшей мере в трех или в четырех из следующих пространств: воздушное пространство (в воздухе в состоянии полета), наземное пространство (т.е. по поверхности земли по меньшей мере с частичным погружением в грунт и по меньшей мере с частичным нахождением в воздушном пространстве), надводное пространство (по поверхности воды по меньшей мере с частичным погружением в нее и по меньшей мере с частичным нахождением в воздушном пространстве) и подводное пространство (под водой, т.е. с полным погружением под воду, либо любую иную жидкость или текучую среду). В другом варианте реализации настоящего изобретения по меньшей мере один или каждый из самоходных модулей 200, входящих в состав системы 500-2, может быть снабжен двумя и более движителями 220, которые выполнены каждый или по меньшей мере один из которых выполнен таким образом, что он обеспечивает возможность перемещения указанного самоходного модуля 200 по меньшей мере в одном, по меньшей мере в двух, по меньшей мере в трех или в четырех из следующих четырех пространств: воздушное пространство (в воздухе в состоянии полета, включая нахождение на поверхности или перемещение по поверхности воздушного стационарного или подвижного физического объекта), наземное пространство (т.е. по поверхности земли по меньшей мере с частичным погружением в грунт и по меньшей мере с частичным нахождением в воздушном пространстве, включая нахождение на поверхности или перемещение по поверхности наземного стационарного или подвижного физического объекта), надводное пространство (по поверхности воды по меньшей мере с частичным погружением в нее и по меньшей мере с частичным нахождением в воздушном пространстве, включая нахождение на поверхности или перемещение по поверхности надводного стационарного или подвижного физического объекта) и подводное пространство (под водой, т.е. с полным погружением под воду, либо любую иную жидкость или текучую среду, включая нахождение на поверхности или перемещение по поверхности подводного стационарного или подвижного физического объекта)
При направлении самоходных модулей 200 по фиг. 2-3 в заданную область пространства по меньшей мере из одной из парковочных станций 100, входящих в состав системы 500-2, управляющее устройство системы 500-2, управляющее работой этих самоходных модулей 200 путем выдачи управляющих и/или навигационных команд на их блоки управления (не показаны), обеспечивает возможность размещения каждого из указанных направленных самоходных модулей 200 в заданном пространственном местоположении в соответствии с заданной моделью трехмерного объекта (описана выше), известной управляющему устройству системы 500-2, для формирования в воздухе, на воде, под водой и/или на суше (земле) по меньшей мере одного трехмерного объекта 300, показанного на фиг. 2, из отдельных корпусов 210, каждый из которых относится к одному из указанных направленных самоходных модулей 200. Следует отметить, что сформированный трехмерный объект 300, показанный на фиг. 2, по сути является лишь одним из конкретных вариантов реализации такого трехмерного объекта, формируемых в воздухе, на воде, под водой и/или на суше (земле) при реализации вышеописанной системы 500-2. Таким образом, в заданной области пространства в воздухе, на воде, под водой и/или на суше (земле) может быть параллельно или последовательно сформировано два и более трехмерных объектов 300 с использованием корпусов 210, относящихся по меньшей мере к части из самоходных модулей 200, направленных управляющим устройством системы 500-2 из соответствующих парковочных станций 100 в указанную область пространства. Следует также отметить, что по меньшей мере часть из трехмерных объектов 300, сформированных в заданной области пространства в соответствии с заданной моделью трехмерного объекта, могут находиться в указанной области пространства независимо друг от друга, т.е. без какого-либо физического взаимодействия или физического контакта друг с другом, и/или могут находиться в указанной области пространства с обеспечением возможности физического взаимодействия или физического контакта друг с другом, в том числе в процессе перемещения или движения по меньшей мере одного из указанных взаимодействующих трехмерных объектов в указанной области пространства.
В частности, самоходные модули 200 по фиг. 2-3 могут быть размещены в соответствующих пространственных местоположениях в заданной области пространства в соответствии с заданной моделью трехмерного объекта таким образом, что трехмерный объект 300, сформированный из корпусов 210 указанных самоходных модулей 200, может иметь в целом форму известного трехмерного геометрического объекта (например, форму куба, пирамиды, параллелепипеда, сферы, тетраэдра и т.п.), любую иную подходящую правильную или неправильную трехмерную форму или любой трехмерный объект, который известен в уровне техники или может быть придуман пользователем, в том числе трехмерный объект, имеющий любую правильную форму, криволинейную форму, выгнутую форму, выпуклую форму, неправильную форму, форму, напоминающую любой известный в уровне техники живой или неживой объект, или т.п.
Управляющее устройство системы 500-2 выполнено с возможностью выдачи управляющих команд по меньшей мере на один из самоходных модулей 200, корпуса 210 которых формируют трехмерный объект 300 и которые по сути находятся в составе этого трехмерного объекта 300 в заданной области пространства, с обеспечением возможности изменения формы и/или размера по меньшей мере части корпуса указанного по меньшей мере одного самоходного модуля 200 для по меньшей мере частичного изменения геометрии указанного сформированного трехмерного объекта. Другими словами, управляющие команды, направляемые управляющим устройством системы 500-2 на блок управления самоходного модуля 200, который по сути управляет работой нижеописанных функциональных средств, встроенных в корпус 210 этого самоходного модуля 210, функционально соединенных с ним или выполненных с возможностью взаимодействия с ним с обеспечением возможности изменения формы и/или размера этого корпуса 210, обеспечивают в целом возможность изменения геометрии (т.е. очертания или контура) сформированного трехмерного объекта 300 по меньшей мере в его части, соответствующем указанному корпусу 210 с измененными формой и/или размером. Таким образом, в настоящем изобретении возможен случай, согласно которому в составе сформированного трехмерного объекта 300 может быть только один самоходный модуль 200, корпус 210 которого может быть трансформирован одним из нижеописанных способов с обеспечением возможности изменения его формы и/или размеров, при этом все остальные самоходные модули 200, входящие в состав трехмерного объекта 300, могут иметь каждый нетрансформируемый корпус 210 (то есть корпус 210 с фиксированными и неизменяемыми формой и размерами). Кроме того, в настоящем изобретении возможны случаи, согласно которым в состав сформированного трехмерного объекта 300 могут входить и два, три, четыре, пять, шесть, семь, восемь, девять, десять и более самоходных модулей 200, корпус 210 каждого из которых может быть выполнен с возможностью его трансформации или изменения по форме и/или размеру одним из нижеописанных способов.
Корпус 210 по меньшей мере одного из самоходных модулей 200, входящих в состав системы 500-2 и показанных на фиг. 2-3, выполнен гибким или эластичным, а самоходный модуль 200 дополнительно снабжен одним или более управляемыми рабочими элементами (не показаны), по меньшей мере частично установленными или закрепленными каждый во внутреннем пространстве корпуса 210 и выполненными каждый с возможностью взаимодействия по меньшей мере с одной из конструктивных частей корпуса 210 при приведении в движение или перемещении указанных подвижных рабочих элементов в ответ на соответствующие управляющие команды. Таким образом, подвижные рабочие элементы самоходного модуля 200 в результате их перемещения или приведения их в движение могут входить все во взаимодействие с одной и той же конструктивной частью корпуса 210 или разными конструктивными частями корпуса 210. Кроме того, в настоящем изобретении возможен случай, когда по меньшей мере один из подвижных рабочих элементов самоходного модуля 200 может входить во взаимодействие или взаимодействовать одновременно с двумя, тремя, четырьмя, пятью, шестью, семью, восемью, девятью, десятью и более конструктивными частями корпуса 210. Взаимодействие по меньшей мере одного подвижного рабочего элемента самоходного модуля 200 по меньшей мере с одной из конструктивных частей корпуса 210 в результате обеспечивает возможность по меньшей мере частичного изменения формы и/или размера корпуса 210 (в частности, путем сгибания или изгибания части корпуса 210, либо сдавливания или сжатия части корпуса 210, либо растягивания или оттягивания части корпуса 210, либо продавливания или проминания части корпуса 210, либо иными характерными причинами) вследствие приложения воздействующего усилия или воздействующих усилий различных типов, уровней и направленностей к указанной по меньшей мере одной части корпуса 210, при этом такие изменения по форме и/или размерам корпуса 210 могут быть реализованы не только в области корпуса 210, соответствующей указанной части корпуса 210, во взаимодействие с которой входит указанный рабочий элемент самоходного модуля 200, но и в зоне корпуса 210, окружающей указанную часть корпуса 210 или во всем корпусе 210. Для приведения в движение или перемещения подвижных рабочих элементов самоходного модуля 200 этот самоходный модуль 200 дополнительно содержит по меньшей мере одно приводное устройство (не показано), по меньшей мере частично установленное во внутреннем пространстве корпуса 210 и находящееся под управлением блока управления самоходного модуля 200, который в свою очередь может получать управляющие команды от управляющего устройства системы 500-2. Приводное устройство самоходного модуля 200 функционально соединено с каждым из подвижных рабочих элементов (в частности, напрямую, с использованием одного соединительного элемента или с использованием двух и более функционально соединенных между собой соединительных элементов) с обеспечением возможности передачи усилия, генерируемого указанным приводным устройством, по меньшей мере на один из подвижных рабочих элементов самоходного модуля 200 для приведения в движение или перемещения указанного по меньшей мере одного подвижного рабочего элемента в ответ на управляющие команды управляющего устройства системы 500-2, выдаваемые на указанное приводное устройство посредством блока управления самоходного модуля 200. Таким образом, в настоящем изобретении возможен случай, согласно которому самоходный модуль 200 содержит только одно приводное устройство (не показано), функционально соединенное с одним подвижным рабочим элементом самоходного модуля 200 или функционально соединенное с двумя и более подвижными рабочими элементами самоходного модуля 200 с обеспечением возможности их по существу одновременного или (в качестве альтернативы) последовательного приведения в движение или перемещения. Кроме того, в настоящем изобретении возможен случай, согласно которому самоходный модуль 200 содержит два приводных устройства (не показаны), функционально соединенных оба с одним и тем же подвижным рабочим элементом самоходного модуля 200. В настоящем изобретении также возможен случай, согласно которому самоходный модуль 200 содержит два приводных устройства (не показаны), функционально соединенных с разными подвижными рабочими элементами самоходного модуля 200 или с разными группами/совокупностями подвижных рабочих элементов, которые могут быть образованы каждая из отдельных подвижных рабочих элементов самоходного модуля 200 или функционально соединенных между собой подвижных рабочих элементов самоходного модуля 200, при этом в ответ на управляющие команды от управляющего устройства системы 500-2 в действие могут быть приведены оба приводных устройства (в частности, одновременно или последовательно) или в действие могут быть приведен только один из этих приводных устройств. Кроме того, в настоящем изобретении возможен случай, согласно которому самоходный модуль 200 содержит одно и более приводных устройств (не показаны), каждое из которых функционально соединено по меньшей мере с двумя подвижными рабочими элементами самоходного модуля 200, при этом при приведении в действие указанного приводного устройства оно может обеспечивать возможность приведения в движение или возможность перемещения только одного из указанных подвижных рабочих элементов или по меньшей мере одного из указанных по меньшей мере двух подвижных рабочих элементов (в частности, благодаря использованию вспомогательных технических средств и/или устройств, функционально соединенных по меньшей мере с одним из подвижных рабочих элементов или каждым из них с обеспечением возможности блокирования перемещения остальных подвижных рабочих элементов и находящихся под управлением, например, блока управления самоходного модуля 200).
В одном из вариантов реализации настоящего изобретения корпус 210 по меньшей мере одного из самоходных модулей 200, входящих в состав системы 500-2, может быть выполнен гибким или эластичным, а самоходный модуль 200 может быть дополнительно снабжен одним или более подвижными рабочими элементами (не показаны), по меньшей мере частично установленными или закрепленными каждый во внутреннем пространстве корпуса 210 и функционально соединенными каждый по меньшей мере с одной из конструктивных частей корпуса 210. Таким образом, подвижные рабочие элементы самоходного модуля 200 в результате их перемещения или приведения их в движение в ответ на соответствующие управляющие команды могут воздействовать (передавать воздействующее усилие) на одну и ту же конструктивную часть корпуса 210 или разные конструктивные части корпуса 210. Кроме того, в данном варианте реализации настоящего изобретения возможен случай, когда по меньшей мере один из подвижных рабочих элементов самоходного модуля 200 может быть функционально соединен одновременно с двумя, тремя, четырьмя, пятью, шестью, семью, восемью, девятью, десятью и более конструктивными частями корпуса 210. Функциональное соединение по меньшей мере одного подвижного рабочего элемента самоходного модуля 200 по меньшей мере с одной из конструктивных частей корпуса 210 в данном варианте реализации настоящего изобретения в результате обеспечивает возможность по меньшей мере частичного изменения формы и/или размера корпуса 210 (в частности, путем сгибания или изгибания части корпуса 210, либо сдавливания или сжатия части корпуса 210, либо растягивания или оттягивания части корпуса 210, либо продавливания или проминания части корпуса 210, либо т.п.) вследствие приложения воздействующего усилия или воздействующих усилий различных типов, уровней и направленностей к указанной по меньшей мере одной части корпуса 210, при этом такие изменения по форме и/или размерам корпуса 210 могут быть реализованы не только в области корпуса 210, соответствующей указанной части корпуса 210, с которой функционально соединен указанный рабочий элемент самоходного модуля 200, но и в зоне корпуса 210, окружающей указанную часть корпуса 210 или во всем корпусе 210. Для приведения в движение или перемещения подвижных рабочих элементов самоходного модуля 200 в данном варианте реализации настоящего изобретения этот самоходный модуль 200 дополнительно содержит по меньшей мере одно приводное устройство (не показано), по меньшей мере частично установленное во внутреннем пространстве корпуса 210 и находящееся под управлением блока управления самоходного модуля 200, который в свою очередь может получать управляющие команды от управляющего устройства системы 500-2, при этом в целом приводное устройство самоходного модуля 200 в данном варианте реализации настоящего изобретения выполнено, функционально соединено с соответствующими подвижными рабочими элементами самоходного модуля 200 и функционирует (работает) аналогично приводному устройству, описанному выше для предпочтительного варианта реализации самоходного модуля 200. В одной из разновидностей данного варианта реализации настоящего изобретения корпус 210 по меньшей мере одного из самоходных модулей 200, входящих в состав системы 500-2, или каждого из них может быть только частично выполнен гибким или эластичным и может быть функционально соединен или выполнен с возможностью функционального взаимодействия с подвижными рабочими элемента, при этом остальная часть указанного корпуса 210 может быть выполнена за одно целое или составной (сборной) и может иметь неизменные форму и размер (может быть выполнена жесткой без возможности изменения своей формы и/или своих размеров при приложении к ней или передачи на нее какого-либо воздействующего усилия).
В другом варианте реализации настоящего изобретения корпус 210 по меньшей мере одного из самоходных модулей 200, входящих в состав системы 500-2, может быть выполнен из частей или пластин (в частности, по меньшей мере из двух частей или пластин), соединенных между собой или выполненных с возможностью смещения по отношению друг к другу с обеспечением возможности по меньшей мере частичного изменения формы указанного корпуса 210, а указанный по меньшей мере один самоходный модуль 200 дополнительно снабжен одним или более подвижными рабочими элементами (не показаны), каждый из которых функционально соединен или выполнен с возможностью взаимодействия по меньшей мере с одной из указанных частей или пластин корпуса 210 с обеспечением возможности их смещения по отношению друг к другу при приведении в движение или перемещении указанных подвижных рабочих элементов. Следует отметить, что части или пластины корпуса 210 могут быть выполнены все жесткими или могут быть выполнены все гибкими или эластичными, при этом в качестве альтернативы одна часть из указанных составных частей или пластин корпуса 210 могут быть выполнены жесткими, а другая часть из указанных составных частей или пластин корпуса 210 могут быть выполнены гибкими или эластичными. Подвижные рабочие элементы самоходного модуля 200 в результате их перемещения или приведения их в движение могут воздействовать (передавать воздействующее усилие) на одну и ту же часть или пластину корпуса 210 или разные части или пластины корпуса 210. Таким образом, в данном варианте реализации настоящего изобретения возможен случай, согласно которому части или пластины, из которых образован корпус 210 в самоходном модуле 200, функционально соединены между собой с использованием, например, гибких или подвижных соединений, которые обеспечивают возможность смещения указанных частей или пластин корпуса 210 при приложении к ним воздействующего усилия или воздействующих усилий со стороны соответствующих рабочих элементов подвижного модуля 200. Кроме того, в данном варианте реализации настоящего изобретения возможен случай, согласно которому части или пластины, из которых образован корпус 210 в самоходном модуле 200, размещены на заданном расстоянии по отношению друг к другу (т.е. между смежными составными частями или пластинами корпуса 210 имеются, например, промежутки, зазоры или щелевые отверстия) или размещены вплотную друг к другу (с возможностью свободного выхода из взаимного контакта или взаимодействия при приложении к таким составным пластинам корпуса 210 или по меньшей мере к одной из них по меньшей мере одного воздействующего усилия или при передаче по меньшей мере одного воздействующего усилия по меньшей мере на одну из указанных составных пластин корпуса 210) с образованием в целом непрерывной поверхности корпуса 210 и выполнены с возможностью их смещения (по одному, парами, группами, наборами, совокупностями и/или т.п.) по отношению друг к другу по меньшей мере по одной из трех пространственных осей (в частности, по одной пространственной оси, двум пространственным осям или трем пространственным осям) при приложении к ним воздействующего усилия или воздействующих усилий со стороны соответствующих рабочих элементов подвижного модуля 200, при этом по меньшей мере часть из указанных смещаемых частей или пластин корпуса 210 могут взаимодействовать друг с другом в процессе их взаимного смещения и оставаться в состоянии взаимодействия после завершения указанного процесс смещения. Смещение частей или пластин, из которых образован корпус 210 самоходного модуля, по сути происходит вследствие приложения воздействующего усилия или воздействующих усилий различных типов, уровней и направленностей к смещаемым частям или пластинам корпуса 210, что в результате обеспечивает возможность по меньшей мере частичного изменения формы и/или размера корпуса 210. Следует отметить, что при выполнении корпуса 210 из жестких составных частей или пластин по меньшей мере частичное изменение формы и/или размера корпуса 210 может быть по сути обусловлено увеличением или уменьшением расстояния по меньшей мере между частью из составных частей или пластин корпуса 210 и/или пространственного смещения по меньшей мере части из составных частей или пластин корпуса 210 по отношению друг к другу, и/или наклона или поворота на заданный угол по меньшей мере части из составных частей или пластин корпуса 210 по отношению друг к другу, и/или прочими характерными причинами. Следует также отметить, что при выполнении корпуса 210 из гибких или эластичных составных частей или пластин по меньшей мере частичное изменение формы и/или размера корпуса 210 может быть обусловлено по меньшей мере одной из вышеописанных причин, характерных для жестких составных частей или пластин корпуса 210, а также может быть дополнительно обусловлено сгибанием или изгибанием по меньшей мере части из составных частей или пластин корпуса 210 и/или сдавливанием или сжатием по меньшей мере части из составных частей или пластин корпуса 210, и/или растягиванием или оттягиванием по меньшей мере части из составных частей или пластин корпуса 210, и/или продавливанием или проминанием по меньшей мере части из составных частей или пластин корпуса 210, и/или иными характерными причинами. Кроме того, в данном варианте реализации настоящего изобретения возможен случай, согласно которому по меньшей мере один из подвижных рабочих элементов самоходного модуля 200 может быть функционально соединен одновременно с двумя, тремя, четырьмя, пятью, шестью, семью, восемью, девятью, десятью и более составными частями или пластинами корпуса 210. Для приведения в движение или перемещения подвижных рабочих элементов самоходного модуля 200 в данном варианте реализации настоящего изобретения этот самоходный модуль 200 дополнительно содержит по меньшей мере одно приводное устройство (не показано), по меньшей мере частично установленное во внутреннем пространстве корпуса 210 и находящееся под управлением блока управления самоходного модуля 200, который в свою очередь может получать управляющие команды от управляющего устройства системы 500-2, при этом в целом приводное устройство самоходного модуля 200 в данном варианте реализации настоящего изобретения выполнено, функционально соединено с соответствующими подвижными рабочими элементами самоходного модуля 200 и функционирует (работает) аналогично приводному устройству, описанному выше для предпочтительного варианта реализации самоходного модуля 200. В одной из разновидностей данного варианта реализации настоящего изобретения корпус 210 по меньшей мере одного из самоходных модулей 200, входящих в состав системы 500-2, или каждого из них может быть только частично выполнен из вышеописанных составных частей или пластин, соединенных между собой или выполненных с возможностью смещения по отношению друг к другу, в частности может содержать только две три, четыре, пять или более таких составных частей или пластин, при этом остальная часть указанного корпуса 210 может быть выполнена за одно целое или составной (сборной) и может иметь неизменные форму и размер (может быть выполнена жесткой без возможности изменения своей формы и/или своих размеров при приложении к ней или передачи на нее какого-либо воздействующего усилия).
Еще в одном варианте реализации настоящего изобретения корпус 210 по меньшей мере одного из самоходных модулей 200, входящих в состав системы 500-2, может быть выполнен из подвижных частей или подвижных пластин (в частности, по меньшей мере из двух подвижных частей или пластин), каждая из которых выполнена с возможностью изменения своего пространственного положения и/или пространственной ориентации с обеспечением возможности по меньшей мере частичного изменения формы указанного корпуса 210, а указанный по меньшей мере один самоходный модуль 200 дополнительно снабжен одним или более подвижными рабочими элементами (не показаны), каждый из которых функционально соединен или выполнен с возможностью взаимодействия по меньшей мере с одной из указанных подвижных частей или пластин корпуса 210 с обеспечением возможности их смещения по отношению друг к другу при приведении в движение или перемещении указанных подвижных рабочих элементов. Следует отметить, что подвижные части или пластины корпуса 210 могут быть выполнены все жесткими или могут быть выполнены все гибкими или эластичными, при этом в качестве альтернативы одна часть из указанных подвижных частей или пластин корпуса 210 могут быть выполнены жесткими, а другая часть из указанных подвижных частей или пластин корпуса 210 могут быть выполнены гибкими или эластичными. Подвижные рабочие элементы самоходного модуля 200 в результате их перемещения или приведения их в движение могут воздействовать (передавать воздействующее усилие) на одну и ту же подвижную часть или пластину корпуса 210 или разные подвижные части или пластины корпуса 210. Таким образом, в данном варианте реализации настоящего изобретения возможен случай, согласно которому подвижные части или пластины, из которых образован корпус 210 в самоходном модуле 200, функционально соединены между собой с использованием, например, гибких или подвижных соединений, которые обеспечивают возможность изменения пространственного положения и/или пространственной ориентации указанных подвижных частей или пластин корпуса 210 при приложении к ним воздействующего усилия или воздействующих усилий со стороны соответствующих рабочих элементов подвижного модуля 200. Кроме того, в данном варианте реализации настоящего изобретения возможен случай, согласно которому подвижные части или пластины, из которых образован корпус 210 в самоходном модуле 200, размещены на заданном расстоянии по отношению друг к другу (т.е. между смежными подвижными частями или пластинами корпуса 210 имеются, например, промежутки, зазоры или щелевые отверстия) или размещены вплотную друг к другу (с возможностью свободного выхода из взаимного контакта или взаимодействия при приложении к таким подвижным пластинам корпуса 210 или по меньшей мере к одной из них по меньшей мере одного воздействующего усилия или при передаче по меньшей мере одного воздействующего усилия по меньшей мере на одну из указанных подвижных пластин корпуса 210) с образованием в целом непрерывной поверхности корпуса 210 и выполнены с возможностью изменения своего пространственного положения и/или своей пространственной ориентации при приложении к ним воздействующего усилия или воздействующих усилий со стороны соответствующих рабочих элементов подвижного модуля 200, при этом по меньшей мере часть из указанных подвижных частей или пластин корпуса 210 могут взаимодействовать друг с другом в процессе изменения их пространственного положения и/или их пространственной ориентации и оставаться в состоянии взаимодействия после завершения указанного процесса изменения их пространственного положения и/или их пространственной ориентации. Изменение пространственного положения и/или пространственной ориентации подвижных частей или пластин, из которых образован корпус 210 самоходного модуля, по сути происходит вследствие приложения воздействующего усилия или воздействующих усилий различных типов, уровней и направленностей к указанным подвижным частям или пластинам корпуса 210, что в результате обеспечивает возможность по меньшей мере частичного изменения формы и/или размера корпуса 210. Следует отметить, что при выполнении корпуса 210 из жестких подвижных частей или пластин по меньшей мере частичное изменение формы и/или размера корпуса 210 может быть по сути обусловлено увеличением или уменьшением расстояния по меньшей мере между частью из подвижных частей или пластин корпуса 210 и/или пространственного смещения по меньшей мере части из подвижных частей или пластин корпуса 210 по отношению друг к другу, и/или наклона или поворота на заданный угол по меньшей мере части из подвижных частей или пластин корпуса 210 по отношению друг к другу, и/или прочими характерными причинами. Следует также отметить, что при выполнении корпуса 210 из гибких или эластичных подвижных частей или пластин по меньшей мере частичное изменение формы и/или размера корпуса 210 может быть обусловлено по меньшей мере одной из вышеописанных причин, характерных для жестких подвижных частей или пластин корпуса 210, а также может быть дополнительно обусловлено сгибанием или изгибанием по меньшей мере части из подвижных частей или пластин корпуса 210 и/или сдавливанием или сжатием по меньшей мере части из подвижных частей или пластин корпуса 210, и/или растягиванием или оттягиванием по меньшей мере части из подвижных частей или пластин корпуса 210, и/или продавливанием или проминанием по меньшей мере части из подвижных частей или пластин корпуса 210, и/или иными характерными причинами. Кроме того, в данном варианте реализации настоящего изобретения возможен случай, согласно которому по меньшей мере один из подвижных рабочих элементов самоходного модуля 200 может быть функционально соединен одновременно с двумя, тремя, четырьмя, пятью, шестью, семью, восемью, девятью, десятью и более подвижными частями или пластинами корпуса 210. Для приведения в движение или перемещения подвижных рабочих элементов самоходного модуля 200 в данном варианте реализации настоящего изобретения этот самоходный модуль 200 дополнительно содержит по меньшей мере одно приводное устройство (не показано), по меньшей мере частично установленное во внутреннем пространстве корпуса 210 и находящееся под управлением блока управления самоходного модуля 200, который в свою очередь может получать управляющие команды от управляющего устройства системы 500-2, при этом в целом приводное устройство самоходного модуля 200 в данном варианте реализации настоящего изобретения выполнено, функционально соединено с соответствующими подвижными рабочими элементами самоходного модуля 200 и функционирует (работает) аналогично приводному устройству, описанному выше для предпочтительного варианта реализации самоходного модуля 200. В одной из разновидностей данного варианта реализации настоящего изобретения корпус 210 по меньшей мере одного из самоходных модулей 200, входящих в состав системы 500-2, или каждого из них может быть только частично выполнен из вышеописанных подвижных частей или пластин, выполненных каждая с возможностью изменения своего пространственного положения и/или своей пространственной ориентации, в частности может содержать только две три, четыре, пять или более таких подвижных частей или пластин, при этом остальная часть указанного корпуса 210 может быть выполнена за одно целое или составной (сборной) и может иметь неизменные форму и размер (может быть выполнена жесткой без возможности изменения ее формы и/или размеров при приложении к ней или передачи на нее какого-либо воздействующего усилия).
В некоторых вариантах реализации настоящего изобретения по меньшей мере в одном из самоходных модулей 200 корпус 210 может быть по меньшей мере частично выполнен гибким или эластичным и/или по меньшей мере частично выполнен из жестких составных частей или пластин, и/или по меньшей мере частично выполнен из гибких составных частей или пластин, и/или по меньшей мере частично выполнен из жестких подвижных частей или пластин, и/или по меньшей мере частично выполнен из гибких или эластичных подвижных частей или пластин. Другими словами, корпус 210 по меньшей мере одного из самоходных модулей, входящих в состав системы 500-2, может иметь конструктивные особенности, соответствующие любой из вышеописанных комбинаций (т.е. может иметь несколько частей, каждая из которых имеет одну из вышеописанных особенностей реализации корпуса 210), при этом особенности реализация каждой такой комбинации по сути описаны в приведенном выше описании конкретных вариантов реализации настоящего изобретения, относящихся к корпусу 210.
Согласно одному из вариантов реализации настоящего изобретения, в корпусе 210 по меньшей мере одного или каждого из самоходных модулей 200, входящих в состав системы 500-2 и используемых для формирования трехмерного объекта 300, может быть установлен независимый подвижный элемент (не показан), выполненный с возможностью перемещения внутри указанного корпуса 210 под управлением блока управления самоходного модуля 200 с обеспечением возможности перемещения указанного самоходного модуля 200 в пространстве. Блок управления самоходного модуля 200, управляющий работой такого независимого подвижного элемента, может не только приводить в действие указанный подвижный элемент с обеспечением возможности его перемещения и выключать указанный подвижный элемент с обеспечением возможности его остановки, но и изменять параметры работы указанного подвижного элемента (например, скорость перемещения). В качестве примера независимый подвижный элемент самоходного модуля 200 может быть выполнен в виде шара или сферы, перемещающегося в пределах корпуса 210 самоходного модуля. В качестве еще одного примера независимый подвижный элемент самоходного модуля 200 может быть выполнен в виде управляемого устройства или объекта любой формы, способного перекатываться или переваливаться во внутреннем пространстве корпуса 210 самоходного модуля. В качестве другого примера независимый подвижный элемент самоходного модуля 200 может иметь смещенный центр тяжести, что упрощает задачу по обеспечению возможности перемещения такого подвижного элемента во внутреннем пространстве корпуса 210 самоходного модуля. Таким образом, независимый подвижный элемент самоходного модуля 200, размещенный в корпусе 210 самоходного модуля, при перемещении в пределах корпуса под управлением блока управления самоходного модуля 200 оказывает воздействие на корпус 210 самоходного модуля с его внутренней стороны с обеспечением возможности приведения в движение корпуса 210 самоходного модуля и, следовательно, самого самоходного модуля 200.
Согласно другому варианту реализации настоящего изобретения, корпус 210 по меньшей мере одного или каждого из самоходных модулей 200, входящих в состав системы 500-2 и используемых для формирования трехмерного объекта 300, может быть снабжен приводным устройством (не показано), функционально соединенным с указанным 210 корпусом или выполненным с возможностью воздействия на указанный корпус 210 с обеспечением возможности приведения указанного корпуса 210 в движение для перемещения указанного самоходного модуля 200 в пространстве, при этом такое приводное устройство может находиться под управлением блока управления самоходного модуля 200, что позволяет включать, выключать или изменять параметры работы указанного приводного устройства путем выдачи соответствующих управляющих команд на указанное приводного устройство указанным блоком управления, а управляющие команды блока управления самоходного модуля 200 могут быть сгенерированы этим блоком управления в ответ на соответствующие управляющие команды управляющего устройства системы 500-2.
В иных вариантах реализации настоящего изобретения корпус 210 по меньшей мере одного из самоходных модулей 200, входящих в состав системы 500-2, или каждого из них может представлять собой складную сетку (не показана), выполненную с возможностью окружения указанного по меньшей мере одного самоходного модуля при ее развертывании. Самоходный модуль 200 в данном варианте реализации настоящего изобретения может дополнительно содержать приводное устройство, находящееся под управлением блока управления самоходного модуля 200, который в свою очередь может получать управляющие команды от управляющего устройства системы 500-2, и функционально соединенное с сеткой (не показана) с обеспечением возможности ее раскладывания или развертывания при формировании трехмерного объекта 300 в ответ на управляющие команды управляющего устройства системы 500-2. Следует отметить, что в данном варианте реализации настоящего изобретения сетка самоходного модуля 200 может находиться в двух состояниях: сложенное или свернутое состояние, которое соответствует первоначальному положению сетки самоходного модуля 200 и в котором сетка самоходного модуля 200 находится при перемещении самоходного модуля 200 (например, в процессе перемещения самоходного модуля 200 в заданную область пространства и/или в заданное пространственное местоположение, в том числе из одной из парковочных станций 100, а также в процессе перемещения самоходного модуля в одну из парковочных станций 100 при расформировании трехмерного объекта 300), и развернутое состояние, в котором сетка самоходного модуля 200 находится при нахождении самоходного модуля 200 в составе трехмерного объекта), при этом сетка самоходного модуля 200 в свернутом состоянии имеет свой минимальный размер, а сетка самоходного модуля 200 в развернутом состоянии имеет свой максимальный размер.
В других вариантах реализации настоящего изобретения корпус 210 в каждом или по меньшей мере в одном из самоходных модулей 200, входящих в состав системы 500-2 и используемых для формирования трехмерного объекта 300, может быть образован из отдельных функциональных частей (не показаны) и может содержать приводное устройство (не показано), функционально соединенное с указанными функциональными частями с обеспечением возможности раздвижения или развертывания этих функциональных частей для изменения формы, размеров и/или контура указанного корпуса 210, что таким образом позволяет изменять по меньшей мере часть трехмерного объекта 300, соответствующую указанному самоходному модулю 200.
В некоторых других вариантах реализации настоящего изобретения корпус 210 в каждом или по меньшей мере в одном из самоходных модулей 200, входящих в состав системы 500-2 и используемых для формирования трехмерного объекта 300, может быть образован из отдельных управляемых функциональных частей (не показаны), при этом блок управления самоходного модуля 200 может быть соединен с возможностью обмена данными с указанными управляемыми функциональными частями с обеспечением возможности смещения (изменения пространственных местоположений) указанных функциональных частей по отношению друг к другу в ответ на управляющие команды указанного блока управления, которые в свою очередь могут быть сгенерированы блоком управления самоходного модуля 200 в ответ на соответствующие управляющие команды управляющего устройства системы 500-2, для изменения формы, размеров и/или контура указанного корпуса 210.
В некоторых иных вариантах реализации настоящего изобретения корпус 210 в каждом или по меньшей мере в одном из самоходных модулей 200, входящих в состав системы 500-2 и используемых для формирования трехмерного объекта 300, может быть образован из отдельных управляемых функциональных частей (не показаны), при этом блок управления самоходного модуля 200 может быть соединен с возможностью обмена данными с указанными управляемыми функциональными частями с обеспечением возможности раздвижения или развертывания этих функциональных частей в ответ на управляющие команды указанного блока управления для изменения формы, размеров и/или контура указанного корпуса 210.
Согласно одному из вариантов реализации настоящего изобретения, по меньшей мере два из самоходных модулей 200, которые входят в состав системы 500-2 и корпуса 210 которых формируют трехмерный объект 300, могут быть дополнительно снабжены каждый одним или более пружинными или гибкими соединительными элементами (не показаны), обеспечивающими возможность разъемного соединения между собой указанных по меньшей мере двух самоходных модулей 200 при формировании трехмерного объекта 300 и обеспечивающими возможность изменения пространственного местоположения и/или пространственной ориентации по меньшей мере одного из указанных по меньшей мере двух самоходных модулей 200 по меньшей мере для частичного изменения геометрии трехмерного объекта 300 (то есть формы, размеров и/или контура такого трехмерного объекта 300). Таким образом, гибкие соединительные элементы (не показаны), которыми могут быть снабжены корпуса 210 по меньшей мере части из самоходных модулей 200, входящих в состав системы 500-2 и используемых для формирования трехмерного объекта 300, или каждого из этих самоходных модулей 200, по сути реализуют подвижные связи между корпусами 210 указанных самоходных модулей 200, что позволяет изменять пространственные местоположения и/или пространственные ориентации этих самоходных модулей 200, в том числе смещать эти самоходные модули 200 по отношению друг к другу и/или по отношению к остальным самоходным модулям 200, корпуса 210 которых формируют трехмерный объект 300 и не снабжены подобными гибкими соединительными элементами, по меньшей мере по одной из трех координатных осей (x,y,z) (например, только по одной из трех координатных осей, одновременно по любым двум из трех координатных осей или одновременно по всем трем координатным осям), а также наклонять или поворачивать эти самоходные модули 200 по отношению друг к другу и/или по отношению к указанным остальным самоходным модулям 200 для изменения формы, размеров и/или контура по меньшей мере части сформированного трехмерного объекта 300, соответствующей корпусам 210 с измененным пространственным местоположением и/или корпусам 210 с измененным пространственным наклоном в составе трехмерного объекта 300. Следует также отметить, что в данном варианте реализации настоящего изобретения изменение пространственного местоположения и/или пространственной ориентации по меньшей мере одного из самоходных модулей 200, корпуса 210 которых снабжены гибкими соединительными элементами (не показаны), может быть осуществлено пользователем вручную или с использованием специальных подручных средств, которыми может манипулировать указанный пользователь, при этом корпус 210 по меньшей мере одного из таких самоходных модулей 200 с гибкими соединительными элементами может быть дополнительно снабжен по меньшей мере одним фиксирующим средством или фиксатором (не показан) для фиксации измененного пространственного местоположения и/или измененной пространственной ориентации указанного по меньшей мере одного самоходного модуля 200 по отношению к остальным самоходным модулям 200, корпуса 210 которых формируют трехмерный объект 300. Кроме того, в одной из разновидностей данного варианта реализации настоящего изобретения, в котором по меньшей мере два из самоходных модулей 200, входящих в состав системы 500-2, дополнительно снабжены каждый гибкими соединительными элементами (не показаны), по меньшей мере один из указанных по меньшей мере двух самоходных модулей 200 или каждый из них может быть дополнительно снабжен приводным устройством (не показано), находящимся под управлением блока управления указанного самоходного модуля 200, который в свою очередь может получать управляющие команды от управляющего устройства системы 500-2, и функционально соединенным с вышеописанными гибкими соединительными элементами (не показаны) указанного по меньшей мере одного самоходного модуля 200 с обеспечением возможности изменения его пространственного местоположения и/или его пространственной ориентации, что позволяет по меньшей мере частично изменять геометрию ранее сформированного или только формируемого трехмерного объекта 300 (то есть изменять формы, размеры и/или очертания такого трехмерного объекта 300).
Согласно другому варианту реализации настоящего изобретения, по меньшей мере два из самоходных модулей 200, которые входят в состав системы 500-2 и корпуса 210 которых формируют трехмерный объект 300, могут быть дополнительно снабжены каждый одним или более подвижными соединениями (не показаны), обеспечивающими возможность разъемного соединения между собой указанных по меньшей мере двух самоходных модулей 200 при формировании трехмерного объекта 300 и обеспечивающими возможность изменения пространственного местоположения и/или пространственной ориентации по меньшей мере одного из указанных по меньшей мере двух самоходных модулей 200 по меньшей мере для частичного изменения геометрии трехмерного объекта 300 (то есть формы, размеров и/или контура такого трехмерного объекта 300). Таким образом, подвижные соединения (не показаны), которыми могут быть снабжены корпуса 210 по меньшей мере части из самоходных модулей 200, входящих в состав системы 500-2 и используемых для формирования трехмерного объекта 300, или каждого из этих самоходных модулей 200, по сути реализуют подвижные связи между корпусами 210 указанных самоходных модулей 200, что позволяет изменять пространственные местоположения и/или пространственные ориентации этих самоходных модулей 200, в том числе смещать эти самоходные модули 200 по отношению друг к другу и/или по отношению к остальным самоходным модулям 200, корпуса 210 которых формируют трехмерный объект 300 и не снабжены подобными подвижными соединениями, по меньшей мере по одной из трех координатных осей (x,y,z) (например, только по одной из трех координатных осей, одновременно по любым двум из трех координатных осей или одновременно по всем трем координатным осям), а также наклонять или поворачивать эти самоходные модули 200 по отношению друг к другу и/или по отношению к указанным остальным самоходным модулям 200 для изменения формы, размеров и/или контура по меньшей мере части сформированного трехмерного объекта 300, соответствующей корпусам 210 с измененным пространственным местоположением и/или корпусам 210 с измененным пространственным наклоном в составе трехмерного объекта 300. Следует также отметить, что в данном варианте реализации настоящего изобретения изменение пространственного местоположения и/или пространственной ориентации по меньшей мере одного из самоходных модулей 200, корпуса 210 которых снабжены подвижными соединениями (не показаны), может быть осуществлено пользователем вручную или с использованием специальных подручных средств, которыми может манипулировать указанный пользователь, при этом корпус 210 по меньшей мере одного из таких самоходных модулей 200 с подвижными соединениями может быть дополнительно снабжен по меньшей мере одним фиксирующим средством или фиксатором (не показан) для фиксации измененного пространственного местоположения и/или измененной пространственной ориентации указанного по меньшей мере одного самоходного модуля 200 по отношению к остальным самоходным модулям 200, корпуса 210 которых формируют трехмерный объект 300. Кроме того, в одной из разновидностей данного варианта реализации настоящего изобретения, в котором по меньшей мере два из самоходных модулей 200, входящих в состав системы 500-2, дополнительно снабжены каждый подвижными соединениями (не показаны), по меньшей мере один из указанных по меньшей мере двух самоходных модулей 200 или каждый из них может быть дополнительно снабжен приводным устройством (не показано), находящимся под управлением блока управления указанного самоходного модуля 200, который в свою очередь может получать управляющие команды от управляющего устройства системы 500-2, и функционально соединенным с вышеописанными подвижными соединениями (не показаны) указанного по меньшей мере одного самоходного модуля 200 с обеспечением возможности изменения его пространственного местоположения и/или его пространственной ориентации, что позволяет по меньшей мере частично изменять геометрию ранее сформированного или только формируемого трехмерного объекта 300 (то есть изменять формы, размеры и/или очертания такого трехмерного объекта 300).
Согласно еще одному варианту реализации настоящего изобретения, по меньшей мере один из самоходных модулей 200, направляемых в заданную область пространства в ответ на соответствующие навигационные команды от управляющего устройства системы 500-2, может быть дополнительно снабжен захватным устройством или захватом (не показан), выполненным с возможностью перемещения и/или позиционирования по меньшей мере одного другого самоходного модуля из указанных направленных самоходных модулей 200 при формировании трехмерного объекта 300 из корпусов 210 самоходных модулей 200, в частности при формировании по меньшей мере части трехмерного объекта 300 из корпусов 210, относящихся указанным самоходным модулям, взаимодействующим между собой посредством захвата. Следует отметить, что в данном варианте реализации настоящего изобретения захват (не показан), которым может быть снабжен корпус 210 по меньшей мере в одном из самоходных модулей 200, используемых для формирования трехмерного объекта 300, может находиться под управлением блока управления указанного самоходного модуля 200, который в свою очередь может получать управляющие команды для управления захватом от управляющего устройства системы 500-2, при этом указанный самоходный модуль 200 с захватом может дополнительно содержать по меньшей мере одно приводное устройство для приведения в действие указанного захвата, в частности его функциональных элементов. В одной из разновидностей данного варианта реализации настоящего изобретения захват самоходного модуля 200 может быть выполнен в виде роботизированного манипулятора или роботизированной руки, выполненной с возможностью разъемного захвата объектов, в частности самоходных модулей 200.
Согласно иному варианту реализации настоящего изобретения, система 500-2 может дополнительно содержать один или более конструкционных модулей (не показаны), а по меньшей мере один из самоходных модулей 200, направляемых в заданную область пространства в ответ на соответствующие навигационные команды от управляющего устройства системы 500-2, может быть дополнительно снабжен захватным устройством или захватом (не показан), выполненным с возможностью перемещения и/или позиционирования по меньшей мере одного из указанных конструкционных модулей для формирования по меньшей мере части трехмерного объекта 300 из корпусов 210 самоходных модулей и указанных конструкционных модулей (не показаны). Таким образом, захват (не показан) подвижного модуля 200 может захватывать конструкционный модуль системы 500-2 с обеспечением его надлежащего позиционирования или перемещения по отношению по меньшей мере к одному другому подвижному модулю 200 из подвижных модулей 200, которые должны быть использованы для формирования трехмерного объекта 300. Следует отметить, что в данном варианте реализации настоящего изобретения захват (не показан), которым может быть снабжен корпус 210 по меньшей мере в одном из самоходных модулей 200, используемых для формирования трехмерного объекта 300, может находиться под управлением блока управления указанного самоходного модуля 200, который в свою очередь может получать управляющие команды для управления захватом от управляющего устройства системы 500-2, при этом указанный самоходный модуль 200 с захватом может дополнительно содержать по меньшей мере одно приводное устройство для приведения в действие указанного захвата, в частности его функциональных элементов. Следует также отметить, что в данном варианте реализации настоящего изобретения размеры, форма, материал изготовления, вес и/или т.п. каждого из конструкционных модулей системы 500-2 ничем конкретно не ограничены. В качестве примера по меньшей мере один из конструкционных модулей системы 500-2 может быть выполнен в виде кирпича, цементного блока, металлической балки, композитной арки или т.п. любой формы и любых размеров. В одной из разновидностей данного варианта реализации настоящего изобретения захват самоходного модуля 200 может быть выполнен в виде роботизированного манипулятора или роботизированной руки, выполненной с возможностью разъемного захвата объектов, в частности конструктивных модулей системы 500-2, при этом такие конструктивные модули системы 500-2 могут быть дополнительно снабжены каждый приспособлениями или средствами, упрощающими захват, подъем, удержание, подвешивание и/или перемещение в пространстве указанного конструктивного модуля системы 500-2, например ушками, зацепами, проушинами или т.п. В другой разновидности данного варианта реализации настоящего изобретения по меньшей мере часть из самоходных модулей 200, используемых для формирования трехмерного объекта 300, и по меньшей мере часть из конструкционных модулей системы 500-2 могут быть снабжены каждый по меньшей мере один крепежным средством (не показаны), так что захват самоходного модуля 200 может дополнительно обеспечивать возможность разъемного скрепления каждого захваченного конструктивного модуля системы 500-2 по меньшей мере с одним другим самоходным модулем 200 путем ввода во взаимодействие их соответствующих крепежных средств.
Еще в одной разновидности варианта реализации настоящего изобретения, в котором система 500-2 дополнительно содержит один или более конструкционных модулей, по меньшей мере один из указанных конструкционных модулей системы 500-2 может иметь трансформируемый корпус, выполненный с возможностью его трансформации в ответ на управляющие команды с обеспечением возможности изменения формы и/или размера по меньшей мере части указанного корпуса конструкционного модуля системы 500-2, а управляющее устройство системы 500-2 может быть выполнено с возможностью выдачи управляющих команд на указанный меньшей мере один конструкционный модуль системы 500-2 для трансформации его корпуса. Следует отметить, что трансформация корпуса каждого конструкционного модуля системы 500-2 приводит по меньшей мере к частичному изменению геометрии сформированного трехмерного объекта 300, в частности в части трехмерного объекта 300, соответствующей по меньшей мере указанному конструкционному модулю системы 500-2, входящему в состав указанного трехмерного объекта 300, в частности в части трехмерного объекта 300, соответствующей указанному конструкционному модулю системы 500-2, входящему в состав указанного трехмерного объекта 300, и самоходным модулям 200, пространственное местоположение которых зависит от указанного конструкционного модуля системы 500-2 и, следовательно, может быть изменено в результате перехода указанного конструкционного модуля системы 500-2 в трансформированное состояние или в результате трансформации указанного конструкционного модуля системы 500-2.
Согласно некоторому иному варианту реализации настоящего изобретения, при использовании приводного устройства (не показано) в составе самоходного модуля 200, как описано в данном документе для некоторых вариантов реализации настоящего изобретения, такой самоходный модуль может быть дополнительно выполнен с возможностью выдачи в реальном времени данных о работе своего приводного устройства на управляющее устройство системы 500-2 с обеспечением возможности его замены по меньшей мере на один другой самоходный модуль 200 из числа самоходных модулей 200, находящихся в парковочных станциях 100, входящих в состав системы 500-2, самоходных модулей 200, находящихся в заданной области пространства при формировании трехмерного объекта 300, самоходных модулей 200, направленных в заданную область пространства управляющим устройством системы 500-2 из соответствующих парковочных станций 100 для формирования трехмерного объекта 300, самоходных модулей, формирующих иной трехмерный объект, отличный от трехмерного объекта 300, и/или самоходных модулей 200, высвободившихся в результате расформирования иного трехмерного объекта, отличного от трехмерного объекта 300, в случае выхода приводного устройства указанного самоходного модуля 200 из строя. Таким образом, в одной из разновидностей данного варианта реализации настоящего изобретения система 500-2 может содержать по меньшей мере два самоходных модуля, по меньшей мере один или каждый из которых может быть дополнительно выполнен с возможностью выдачи в реальном времени данных о работе своего приводного устройства на управляющее устройство системы 500-2 с обеспечением возможности его замены по меньшей мере на один другой самоходный модуль 200 по меньшей мере из одной из парковочных станций 100, входящих в состав системы 500-2, в случае выхода указанного приводного устройства из строя. В другой разновидности данного варианта реализации настоящего изобретения система 500-2 может содержать один или более самоходных модулей, по меньшей мере один или каждый из которых может быть дополнительно выполнен с возможностью выдачи в реальном времени данных о работе своего приводного устройства на управляющее устройство системы 500-2 с обеспечением возможности его замены по меньшей мере на один другой самоходный модуль 200 по меньшей мере из одной из парковочных станций 100, входящих в состав системы 500-2, в случае выхода указанного приводного устройства из строя.
Согласно некоторому иному варианту реализации настоящего изобретения, управляющее устройство системы 500-2 может быть дополнительно выполнено с возможностью выдачи навигационных команд по меньшей мере на часть, по меньшей мере на один (один или более) или по меньшей мере на два (два или более) из самоходных модулей 200, которые входят в состав системы 500-2 и корпуса 210 которых формируют трехмерный объект 300, с обеспечением возможности перестроения указанных самоходных модулей 200 по меньшей мере для частичного изменения геометрии указанного трехмерного объекта 300 (т.е. формы, размера и/или контура этого трехмерного объекта 300).
Согласно другим вариантам реализации настоящего изобретения, самоходные модули 200, корпуса 210 которых формируют трехмерный объект 300, могут быть разделены по меньшей мере на две группы, при этом самоходные модули 200 в одной из указанных по меньшей мере двух групп могут иметь скорость перемещения и/или направление перемещения, отличные от самоходных модулей 200 в другой группе из указанных по меньшей мере двух групп.
Согласно иным вариантам реализации настоящего изобретения самоходные модули 200, корпуса 210 которых формируют трехмерный объект 300, могут быть разделены по меньшей мере на две группы, при этом самоходные модули 200 в одной из указанных по меньшей мере двух групп могут иметь габаритные размеры, форму корпуса, рабочие параметры, тип самоходного модуля и/или тип источника питания самоходного модуля и/или вид самоходного модуля, отличные от самоходных модулей 200 в другой группе из указанных по меньшей мере двух групп. Следует отметить, что в состав системы 500-2 в целом могут входить следующие виды самоходных модулей 200: наземные самоходные модули 200, надводные самоходные модули 200, подводные самоходные модули 200 и воздушные самоходные модули 200. Следует также отметить, что в рамках каждого из видов самоходных модулей 200 могут быть выделены различные типы самоходных модулей 200, известных в уровне техники. Например, в рамках воздушных самоходных модулей 200 могут быть выделены следующие типы самоходных модулей 200, известные в уровне техники: самолеты, вертолеты, планеры, аэростаты, воздушные шары, дроны и т.п.
Согласно некоторым вариантам реализации настоящего изобретения по меньшей мере один или по меньшей мере часть (например, по меньшей мере два) из самоходных модулей 200, которые входят в состав системы 500-2 и корпуса 210 которых формируют трехмерный объект 300, могут быть дополнительно выполнены каждый с возможностью сохранения своего пространственного местоположения, ранее занятого при формировании трехмерного объекта 300, в течение заданного периода времени, в частности в течение периода времени, соответствующего продолжительности формирования всего трехмерного объекта 300 или продолжительности формирования по меньшей мере части трехмерного объекта 300 в соответствии с заданной моделью трехмерного объекта с обеспечением возможности сохранения на месте такого сформированного трехмерного объекта 300 по меньшей мере в течение указанного периода времени.
Согласно некоторым другим вариантам реализации настоящего изобретения, самоходные модули 200, которые входят в состав системы 500-2 и корпуса 210 которых формируют трехмерный объект 300, могут быть разделены на две или более групп, а управляющее устройство системы 500-2 может обеспечивать возможность формирования одиночного или одного трехмерного объекта 300 с использованием всех указанных групп самоходных модулей 200. В одной из разновидностей данного варианта реализации настоящего изобретения одна из групп самоходных модулей 200 может быть выполнена с возможностью формирования одной части трехмерного объекта 300, а другая группа из групп самоходных модулей 200 может быть выполнена с возможностью формирования другой части указанного трехмерного объекта 300.
Согласно различным вариантам реализации настоящего изобретения, по меньшей мере часть или каждый из самоходных модулей, которые входят в состав системы 500-2 и корпуса 210 которых формируют трехмерный объект 300, могут быть дополнительно выполнены каждый с возможностью изменения своего пространственного местоположения в соответствии с заданной моделью трехмерного объекта с обеспечением возможности перемещения по меньшей мере части указанного трехмерного объекта 300 в пространстве. Другими словами, возможность перемещения одного или более самоходных модулей 200, входящих в состав сформированного трехмерного объекта 300, из своего первоначального пространственного местоположения в составе трехмерного объекта 300, в котором указанный самоходный модуль находится в статическом или неподвижном состоянии, по предварительной заданной траектории перемещения или предварительно заданному маршруту перемещения, соответствующих заданной модели трехмерного объекта, с последующим возвратом в указанное первоначальное пространственное положение или остановкой (занятием) нового пространственного местоположения, в котором указанный самоходный модуль будет снова находиться в статическом или неподвижном состоянии, позволяет сделать подвижной или динамической по меньшей мере часть трехмерного объекта 300, которая соответствует указанным перемещаемым в пространстве самоходным модулям 200, при этом каждый перемещаемый в пространстве самоходный модуль 200 может перемещаться по меньшей мере в пределах одного из наземного пространства, надводного пространства, воздушного пространства и подводного пространства (в том числе по поверхности иных физических объектов, по меньшей мере частично находящихся по меньшей мере в одном из указанных пространств) или в пределах любой комбинации из указанных пространств, что в свою очередь позволяет части трехмерного объекта 300, соответствующей указанным перемещаемым в пространстве самоходным модулям 200, перемещаться (i) в течение всего цикла движения в пределах одного и того же пространства (например, только в воздушном пространстве) или (ii) часть цикла движения перемещаться в одном из пространств (например, в надводном пространстве), а оставшуюся часть цикла перемещаться в другом пространстве из указанных пространств (например, в подводном пространстве), или (iii) последовательно переходить из одного пространства по меньшей мере в одно другое пространств из указанных пространств (например, начинать перемещение в наземном пространства, переходить далее в надводное пространство, далее погружаться в подводное пространство, снова выходить в надводное пространство, а далее взлетать с надводного пространства в воздушное пространство и, наконец, приземляться из воздушного пространства в наземное пространство) с образованием замкнутого цикла, или т.п.
Согласно различным иным вариантам реализации настоящего изобретения, управляющее устройство системы 500-2 может быть дополнительно выполнено с возможностью выдачи по меньшей мере на один или часть из самоходных модулей 200, которые входят в состав системы 500-2 и корпуса 210 которых формируют трехмерный объект 300, данных об изменении по меньшей мере части трехмерного объекта 300, а каждый из указанной части самоходных модулей 200 может быть дополнительно выполнен с возможностью изменения своего пространственного положения в реальном времени в соответствии с указанными данными об изменении части трехмерного объекта с обеспечением формирования по меньшей мере частично измененного трехмерного объекта. Другими словами, ранее сформированный трехмерный объект 300 может быть перестроен или видоизменен в любой момент времени (например, по желанию пользователя, выдаваемого, посредством пользовательского устройства, пульта управления или операторского пункта управления, в виде управляющих команд на управляющее устройство системы 500-2, которое в свою очередь может обработать указанные пользовательские управляющие команды и сгенерировать в результате указанные данные об изменении трехмерного объекта), что позволяет менять геометрию по меньшей мере части ранее сформированного трехмерного объекта 300 или даже обеспечивать возможность перемещения или движения указанной части трехмерного объекта 300. Например, в случае, когда трехмерный объект представляет собой разводной мост, части такого разводного моста, соответствующие его разводимым створкам, могут изначально находиться в сведенном (разложенном) состоянии, а затем могут быть разведены путем мгновенного или постепенного изменения пространственных местоположений самоходных модулей 200, корпуса 210 которых образуют указанные створки моста.
Согласно различным другим вариантам реализации настоящего изобретения, управляющее устройство системы 500-2 может быть дополнительно выполнено с возможностью выдачи по меньшей мере на часть или по меньшей мере один (один или более) из самоходных модулей, которые входят в состав системы 500-2 и корпуса 210 которых формируют трехмерный объект 300, данных об изменении модели трехмерного объекта, а указанные самоходные модули 200 могут быть дополнительно выполнены каждый с возможностью изменения своего пространственного положения в реальном времени в соответствии с указанными данными об изменении модели трехмерного объекта с обеспечением возможности реализации движения указанного трехмерного объекта или по меньшей мере одной его части по меньшей мере в одном из наземного, надводного, подводного или воздушного пространств, в том числе по поверхности физического объекта, находящегося по меньшей мере части по меньшей мере в одном из указанных пространств.
В одном из вариантов реализации настоящего изобретения самоходные модули 200, которые входят в состав системы 500-2 и корпуса 210 которых формируют трехмерный объект 300, могут быть разделены по меньшей мере на две группы, при этом одна из указанных групп самоходных модулей может быть выполнена с возможностью формирования неподвижной части указанного трехмерного объекта 300, а другая группа из указанных групп самоходных модулей выполнена с возможностью формирования подвижной части указанного трехмерного объекта 300. Например, по меньшей мере одна группа самоходных модулей может формировать неподвижные пролеты трехмерного объекта 300 в виде разводного моста, а по меньшей мере одна другая группа самоходных модулей может формировать разводные створки указанного разводного моста и обеспечивать возможность их перемещения для реализации разведения и сведения этих створок моста путем изменения пространственного местоположения одновременно всех самоходных модулей, формирующих указанные створки, в соответствии с предварительно заданной траекторией или схемой перемещения, соответствующей заданной модели трехмерного объекта.
В другом варианте реализации настоящего изобретения управляющее устройство системы 500-2 может обеспечивать возможность изменения пространственного положения по меньшей мере одного или каждого из самоходных модулей 200, которые входят в состав системы 500-2 и корпуса 210 которых формируют трехмерный объект 300, с обеспечением возможности смещения указанного самоходного модуля 200 по отношению по меньшей мере к одному из остальных самоходных модулей, относящихся к указанным самоходным модулям 200, по меньшей мере по одной из трех координатных осей (x, y, z) таким образом, что указанный трехмерный объект 300 может принимать вогнутую форму, выпуклую форму, неправильную, правильную или криволинейную форму.
Еще в одном варианте реализации настоящего изобретения управляющее устройство системы 500-2 может быть дополнительно выполнено с возможностью выдачи навигационных команд на самоходные модули 200, которые входят в состав системы 500-2 и корпуса 210 которых формируют трехмерный объект 300, для совместного перемещения указанных самоходных модулей 200 с обеспечением сохранения заданной модели трехмерного объекта, что позволяет равномерно перемещать ранее сформированный трехмерный объект 300 без нарушения его целостности.
Следует отметить, что каждый трехмерный объект 300, который может быть сформирован с использованием самоходных модулей 200, по сути приведен в соответствие с конкретной моделью трехмерного объекта из моделей трехмерных объектов, данные о которых могут быть выданы управляющим устройством системы 500-2 на блоки управления самоходных модулей, используемых для формирования трехмерного объекта 300. В частности, трехмерный объект 300 может быть задан автоматически в зависимости от предварительно заданной или выбранной пользователем модели трехмерного объекта и/или в зависимости от предварительно заданной или выбранной пользователем области пространства, в которой необходимо сформировать трехмерный объект 300. В качестве альтернативы трехмерный объект 300, который должен быть сформирован в заданной области пространства, может быть выбран или задан пользователем отдельно от указанной области пространства и/или отдельно от модели трехмерного объекта, в частности с использованием, например, пользовательского устройства, снабженного стандартными средствами ввода-вывода. Следует отметить, что данные о трехмерном объекте 300, который должен быть сформирован в заданной области пространства в соответствии с заданной моделью трехмерного объекта и процессом формирования которого по сути управляет управляющее устройство системы 500-2, управляющее устройство системы 500-2 выдает в составе данных о модели трехмерного объекта на соответствующие блоки управления тех самоходных модулей 200, корпуса 210 которых формируют указанный трехмерный объект 300, при этом указанные данные о модели трехмерного объекта могут быть предварительно загружены или записаны оператором или пользователем в локальную базу данных, входящую в состав управляющего устройства системы 500-2, или могут быть переданы в виде пакета данных от внешнего источника данных (например, из сайта, базы данных, сервера данных и т.п.) по каналу беспроводной передачи данных (не показан), установленному между управляющим устройством системы 500-2 и этим внешним источником данных, в ответ на запрос управляющего устройства системы 500-2, который в свою очередь может быть сгенерирован, например, в ответ на запрос пользовательского устройства, с помощью которого пользователь может выбрать указанный трехмерный объект 300 в списке доступных для выбора изображений трехмерных объектов, которые могут быть сформированы в заданной области пространства.
Трехмерный объект 300, формируемый в заданной области пространства, может представлять собой неподвижный или статический трехмерный объект. Кроме того, трехмерный объект 300, формируемый в заданной области пространства, может представлять собой подвижный или динамический трехмерный объект. Кроме того, трехмерный объект 300, формируемый в заданной области пространства, может представлять собой любую комбинацию из статического трехмерного объекта и динамического трехмерного объекта. В качестве альтернативы трехмерный объект 300, формируемый в заданной области пространства в соответствии с заданной моделью трехмерного объекта, может представлять собой трехмерный объект, имеющий по меньшей мере одну подвижную часть или выполненный по меньшей мере частично подвижным.
В частности, как показано на фиг. 2 в качестве иллюстративного примера, самоходные модули 200, корпуса 210 которых формируют трехмерный объект 300, образуют заданное количество последовательно расположенных горизонтальных или вертикальных рядов (т.е. матрицу самоходных модулей 200), которые сформированы из самоходных модулей 200-1, 200-2, 200-3. Следует отметить, что в каждом из рядов трехмерного объекта 300, могут быть расположены самоходные модули 200 одного и того же типа или самоходные модули разных типов 200.
Кроме того, как показано на фиг. 2 в качестве иллюстративного примера, самоходные модули 200 в виде беспилотных летательных аппаратов с полным или восполненным запасом хода могут вылетать (в других случаях выезжать, выплывать, выпрыгивать, выходить и т.п.) из соответствующих парковочных станций 100, входящих в состав системы 500-2, по существу одновременно или последовательно с небольшими интервалами времени с образованием одной или более входных групп самоходных модулей или отдельных самоходных модулей, направляемых управляющим устройством системы 500-2 в заданную область пространства, в которой предполагается сформировать трехмерный объект 300. Кроме того, управляющее устройство системы 500-2 выдает навигационные команды на направленные самоходные модули 200, находящиеся в заданной области пространства, с обеспечением возможности размещения каждого из указанных направленных самоходных модулей 200 в заданном пространственном местоположении в соответствии с заданной моделью трехмерного объекта, в котором указанный самоходный модуль 200 находится в составе совокупности самоходных модулей, формирующих трехмерный объект 300.
Кроме того, как показано на фиг. 2 в качестве иллюстративного примера, при расформировании или перестроении трехмерного объекта 300 самоходные модули 200, формирующие указанный трехмерный объект 300, или по меньшей мере часть из них могут выходить (например, вылетать, выезжать, выплывать, выпрыгивать, выкатываться, выползать или т.п.) из состава совокупности самоходных модулей, формирующих трехмерный объект 300 в заданной области пространства, по существу одновременно, последовательно или с заданными интервалами времени с образованием одной или более выходных групп самоходных модулей или отдельных самоходных модулей, направляемых управляющим устройством системы 500-2 в сторону парковочных станций 100, входящих в состав системы 500-2. В качестве альтернативы управляющее устройство системы 500-2 может направлять по меньшей мере часть самоходных модулей 200 из групп самоходных модулей, образованных в результате расформирования или перестроения трехмерного объекта 300, в другую область пространства, в которой предполагается сформировать иной трехмерный объект, который может совпадать с ранее сформированным трехмерным объектом 300 или который может по меньшей мере частично отличаться от него. Кроме того, из совокупности самоходных модулей, формирующих трехмерный объект 300 в заданной области пространства, могут выходить и подлежащие замене самоходные модули 200 (т.е. самоходные модули 200 с недостаточным запасом хода или разряженные самоходные модули 200, либо самоходные модули 200 с какими-то неисправностями или поломками).
Как показано на фиг. 2, при подходе групп самоходных модулей, направленных управляющим устройством системы 500-2 в сторону парковочных станций 100, входящих в состав системы 500-2, к указанным парковочным станциям 100 управляющее устройство системы 500-2 обеспечивает возможность по существу одновременного или последовательного выхода самоходных модулей 200 из состава указанных групп самоходных модулей с обеспечением возможности размещения или парковки каждого из таких самоходных модулей 200 в одной или на одной из указанных парковочных станций 100, в частности на парковочной станции 100, имеющей по меньшей мере одно свободное или незанятое зарядное устройство. В случае приближения одиночного самоходного модуля 200, направленного управляющим устройством системы 500-2 к парковочным станциям 100, управляющее устройство системы 500-2 обеспечивает возможность размещения или парковки такого самоходного модуля 200 в одной или на одной из указанных парковочных станций 100, в частности в ответ на управляющие команды управляющего устройства системы 500-2, выдаваемые на блок управления самоходного модуля 200.
В другом варианте реализации настоящего изобретения управляющее устройство системы 500-2 может дополнительно обеспечивать возможность направления каждого разряженного самоходного модуля 200, корпуса 210 которых формируют трехмерный объект 300, на одну из парковочных станций 100, входящих в состав системы 500-2, для его зарядки или восполнения его запаса хода с использованием зарядного устройства на указанной парковочной станции 100 и может дополнительно возможность возврата указанного самоходного модуля 200 с восполненным запасом хода в заданную область пространства с указанным сформированным в нем трехмерным объектом 300 с обеспечением замены по меньшей мере одного из других разряженных самоходных модулей 200, находящихся в составе указанного трехмерного объекта 300.
В некотором другом варианте реализации настоящего изобретения управляющее устройство системы 500-2 может обеспечивать возможность замены каждого разряженного самоходного модуля 200, находящегося в составе трехмерного объекта 300, на заряженный самоходный модуль 200 (т.е. на самоходный модуль 200 с полным запасом хода или по меньшей мере частично восполненным запасом хода) при нахождении указанного разряженного самоходного модуля 200 в пространственном местоположении в заданной области пространства, расположенном на наименьшем расстоянии до места его зарядки или места восполнения его запаса хода, в частности до одной из парковочных станций 100 со свободным зарядным устройством, или при нахождении указанного разряженного самоходного модуля 200 в пространственном местоположении, соответствующем одному из мест замены самоходных модулей в составе сформированного трехмерного объекта 300.
В ином варианте реализации настоящего изобретения в которой одна или более из парковочных станций 100, входящих в состав системы 500-2, могут быть дополнительно снабжены каждая одним или более зарядными устройствами (не показано), а один или более из самоходных модулей 200, которые входят в состав системы 500-2 и корпуса 210 которых формируют трехмерный объект 300, могут быть выполнены каждый с возможностью перемещения по меньшей мере на одну из указанных парковочных станций 100 с зарядными устройствами с обеспечением возможности подключения каждого из указанных направленных самоходных модулей 200 к одному из указанных зарядных устройств для восполнения его запаса хода.
Согласно одному из вариантов реализации настоящего изобретения, трехмерный объект 300 может быть выполнен многослойным. В частности, в таком варианте реализации настоящего изобретения самоходные модули 200, направляемые управляющим устройством системы 500-2 в заданную область пространства для формирования трехмерного объекта 300, могут быть разделены на две группы, при этом корпуса 210 самоходных модулей из первой группы могут формировать по меньшей мере один первый слой указанного трехмерного объекта 300, а корпуса 210 самоходных модулей из второй группы могут формировать по меньшей мере один второй (другой) слой указанного трехмерного объекта 300. Первый слой трехмерного объекта может быть выполнен в целом или по меньшей мере частично параллельно второму слою трехмерного объекта (см. фиг. 4). Следует отметить, что в некоторых случаях первый слой трехмерного объекта может иметь форму, размеры, контуры и/или пространственную ориентацию, отличные от второго слоя трехмерного объекта. Таким образом, в таком варианте реализации настоящего изобретения управляющее устройство системы 500-2 может обеспечивать возможность формирования первого слоя трехмерного объекта, отличного от второго слоя трехмерного объекта или совпадающего с ним, и, следовательно, может обеспечивать возможность формирования отличных друг от друга или одинаковых первой части трехмерного объекта 300, соответствующей указанному первому слою, и второй части трехмерного объекта 300, соответствующей указанному второму слою. В альтернативном варианте управляющее устройство системы 500-2 может обеспечивать возможность формирования из самоходных модулей 200, относящихся к первому слою, первого трехмерного объекта, отличного от второго (другого) трехмерного объекта, формируемого из самоходных модулей 200, относящихся ко второму слою, или совпадающего с указанным вторым трехмерным объектом.
В некотором ином варианте реализации настоящего изобретения управляющее устройство системы 500-2 может обеспечивать возможность направления заряженных самоходных модулей 200 в заданную область пространства в количестве, соответствующем количеству самоходных модулей 200, корпуса 210 которых формируют трехмерный объект 300, с обеспечением возможности их по существу одновременной замены на указанные заряженные самоходные модули 200, при этом указанные направляемые заряженные самоходные модули 200 имеют запас хода, восполненный с использованием зарядных устройств парковочных станций, входящих в состав системы 500-2. В частности, в данном варианте реализации настоящего изобретения управляющее устройство системы 500-2 может дополнительно обеспечивать возможность формирования в заданной области пространства подменного трехмерного объекта из заряженных самоходных модулей 200, являющегося копией заменяемого трехмерного объекта 300, с обеспечением возможности замены заменяемого трехмерного объекта 300 на указанный подменный трехмерный объект, при этом управляющее устройство системы 500-2 может по существу одновременно выдавать управляющие команды на заменяемые самоходные модули 200 и подменные самоходные модули, что минимизирует временную задержку при замене заменяемого трехмерного объекта 300 на указанный подменный трехмерный объект. В одной из разновидностей данного варианта реализации настоящего изобретения подменный трехмерный объект может не только полностью совпадать с заменяемым трехмерным объектом 300, но и по меньшей мере частично отличаться от него. В другой разновидности данного варианта реализации настоящего изобретения управляющее устройство системы 500-2 может дополнительно обеспечивать возможность замены заменяемого трехмерного объекта 300 на подменный трехмерный объект по истечению заданного периода времени, в течение которого указанный заменяемый трехмерный объект будет находиться в заданной области пространства по меньшей мере частично в статическом состоянии и/или по меньшей мере частично в динамическом состоянии.
В других вариантах реализации настоящего изобретения самоходные модули 200, корпуса 210 которых формируют трехмерный объект 300, могут быть разделены по меньшей мере на две группы, в каждой из которых корпуса 210 самоходных модулей 200 могут формировать соответствующую одну из частей трехмерного объекта 300 в заданной области пространства, при этом управляющее устройство системы 500-2 может дополнительно обеспечивать возможность формирования в указанной области пространства по меньшей мере одной подменной части трехмерного объекта 300 из заряженных самоходных модулей 200, направленных в указанную область пространства управляющих устройством системы 500-2, с обеспечением возможности замены заменяемой части трехмерного объекта 300 на указанную по меньшей мере одну подменную часть трехмерного объекта. При замене заменяемой части трехмерного объекта 300 на подменную часть трехмерного объекта 300 управляющее устройство системы 500-2 может по существу одновременно выдавать управляющие команды на самоходные модули 200, корпуса 210 которых формируют заменяемую часть трехмерного объекта 300, и управляющие команды на самоходные модули 200, корпуса которых формируют подменную часть трехмерного объекта 300, что позволяет минимизировать временную задержку при замене заменяемой части трехмерного объекта 300 на подменную часть трехмерного объекта 300.
В иных вариантах реализации настоящего изобретения самоходные модули 200, направляемые управляющим устройством системы 500-2 в заданную область пространства, могут быть разделены на группы, в каждой из которых корпуса 210 самоходных модулей могут по меньшей мере частично формировать по меньшей мере один из слоев трехмерного объекта 300, имеющих разные формы и/или размеры.
В некоторых вариантах реализации настоящего изобретения по меньшей мере один или каждый из самоходных модулей 200, которые входят в состав системы 500-2 и корпуса 210 которых формируют трехмерный объект 300, может быть снабжен по меньшей мере одним источником питания и может быть дополнительно выполнен с возможностью выдачи в реальном времени данных о запасе хода на управляющее устройство системы 500-2. В таких вариантах реализации настоящего изобретения управляющее устройство системы 500-2 может быть дополнительно выполнено с возможностью выявления каждого разряженного самоходного модуля на основании данных о запасе хода, получаемых от блоков управления указанных самоходных модулей 200, что обеспечивает возможность направления (например, в ответ на навигационные команды управляющего устройства системы 500-2) каждого разряженного самоходного модуля из самоходных модулей 200, корпуса которых формируют трехмерный объект 300, на одну из парковочных станций 100, входящих в состав системы 500-2, и дополнительно обеспечивает возможность перестроения оставшихся самоходных модулей 200, корпуса 210 которых задействованы в формировании трехмерного объекта 300, для изменения или сохранения формы и/или размера трехмерного объекта 300.
В некоторых иных вариантах реализации настоящего изобретения управляющее устройство системы 500-2 может быть дополнительно выполнено с возможностью направления в заданную область пространства одного или более дополнительных самоходных модулей 200 по меньшей мере из одной из парковочных станций 100, входящих в состав системы 500-2, с обеспечением возможности их встраивания в структуру трехмерного объекта 300 для изменения формы и/или размера этого трехмерного объекта 300.
В некоторых других вариантах реализации настоящего изобретения самоходные модули 200, которые входят в состав системы 500-2 и корпуса 210 которых формируют трехмерный объект 300, могут быть разделены на группы, в каждой из которых корпуса 210 самоходных модулей могут формировать одну или более из частей трехмерного объекта 300, при этом при формировании трехмерного объекта 300 управляющее устройство системы 500-2 может обеспечивать возможность построения указанных самоходных модулей 200 таким образом, что по меньшей мере одна из указанных частей трехмерного объекта 300 может форму и/или размеры, отличные от остальных частей трехмерного объекта 300.
В некотором ином варианте реализации настоящего изобретения по меньшей мере один или каждый из самоходных модулей 200, входящих в состав системы 500-2, может быть снабжен по меньшей мере одним источником питания, а указанная система 500-2 может дополнительно содержать лазерную установку (не показана), выполненную с возможностью излучения лазерного луча, при этом указанный самоходный модуль 200 может быть снабжен приемником-преобразователем лазерного излучения (не показан), электрически соединенным с указанным источником питания и выполненным с возможностью преобразования принятого лазерного луча в электрический ток с обеспечением возможности зарядки указанного источника питания. В данном варианте реализации настоящего изобретения по меньшей мере один или каждый из самоходных модулей 200, входящих в состав системы 500-2, может быть дополнительно выполнен с возможностью выдачи в реальном времени данных о запасе хода на управляющее устройство системы 500-2, а управляющее устройство системы 500-2 в свою очередь может быть дополнительно выполнено с возможностью управления работой лазерной установки (не показана) с обеспечением возможности направления лазерного луча на самоходный модуль 200, запас хода которого ниже заданного порогового значения.
В различных вариантах реализации настоящего изобретения управляющее устройство системы 500-2 может быть выполнено с возможностью выдачи навигационных команд по меньшей мере на часть из самоходных модулей 200, которые входят в состав системы 500-2 и корпуса 210 которых формируют трехмерный объект 300, для их направления по меньшей мере на одну из парковочных станций, входящих в состав системы 500-2, по истечению заданного периода времени.
В различных других вариантах реализации настоящего изобретения управляющее устройство системы 500-2 может быть выполнено с возможностью выдачи навигационных команд по меньшей мере на часть из самоходных модулей 200, которые входят в состав системы 500-2 и корпуса 210 которых формируют трехмерный объект 300, для их направления по меньшей мере на одну из парковочных станций 100, входящих в состав системы 500-2, по существу одновременно или последовательно.
В различных иных вариантах реализации настоящего изобретения управляющее устройство системы 500-2 может быть дополнительно выполнено с возможностью выдачи навигационных команд по меньшей мере на часть из самоходных модулей 200, которые входят в состав системы 500-2 и корпуса 210 которых формируют трехмерный объект 300, для их направления по меньшей мере на одну из парковочных станций 100, входящих в состав системы 500-2, группами или друг за другом.
В некоторых вариантах реализации настоящего изобретения управляющее устройство системы 500-2 может быть дополнительно выполнено с возможностью выдачи навигационных команд на один или более из заряженных самоходных модулей 200 (т.е. самоходных модулей 200 с запасом хода, восполненным с использованием зарядных устройств на парковочных станциях 100), входящих в состав системы 500-2, с обеспечением возможности их возврата в свои первоначальные пространственные местоположения для повторного формирования того же самого трехмерного объекта 300 или для формирования иного трехмерного объекта, отличного от трехмерного объекта 300.
В некоторых иных вариантах реализации настоящего изобретения один или более из самоходных модулей 200, которые входят в состав системы 500-2 и корпуса 210 которых формируют трехмерный объект 300, могут быть выполнены с возможностью автоматического перемещения по меньшей мере на одну из парковочных станций 100, входящих в состав системы 500-2, по истечению заданного периода времени.
В некоторых других вариантах реализации настоящего изобретения один или более из самоходных модулей 200, которые входят в состав системы 500-2 и корпуса 210 которых формируют трехмерный объект 300, могут быть выполнены с возможностью автоматического перемещения по меньшей мере на одну из парковочных станций, входящих в состав системы 500-2, по существу одновременно или последовательно.
В различных вариантах реализации настоящего изобретения по меньшей мере часть из самоходных модулей 200, которые входят в состав системы 500-2 и корпуса 210 которых формируют трехмерный объект 300, могут быть выполнены с возможностью автоматического перемещения группами или друг за другом по меньшей мере на одну из парковочных станций, входящих в состав системы 500-2.
Согласно одному из вариантов реализации настоящего изобретения, один или более из заряженных самоходных модулей 200, входящих в состав системы 500-2 и корпуса 210 которых формируют трехмерный объект 300, могут быть выполнены с возможностью автоматического возврата в свои первоначальные пространственные местоположения для повторного формирования того же самого трехмерного объекта 300 или для формирования иного трехмерного объекта, отличного от трехмерного объекта 300.
Согласно еще одному варианту реализации настоящего изобретения, управляющее устройство системы 500-2 может быть дополнительно выполнено с возможностью выдачи навигационных команд по меньшей мере на часть из самоходных модулей 200, которые входят в состав системы 500-2 и корпуса 210 которых формируют трехмерный объект 300, с обеспечением возможности перестроения этих самоходных модулей 200 для разделения указанного трехмерного объекта 300 по меньшей мере на два отдельных трехмерных объекта.
Согласно другому варианту реализации настоящего изобретения, управляющее устройство системы 500-2 может дополнительно обеспечивать возможность размещения самоходных модулей 200, направленных в заданную область пространства в ответ на навигационные команды управляющего устройства системы 500-2, в заданных пространственных местоположениях в соответствии с заданной моделью трехмерного объекта с обеспечением возможности формирования по меньшей мере двух трехмерных элементов в указанной области пространства. В одной из разновидностей данного варианта реализации настоящего изобретения управляющее устройство системы 500-2 может быть дополнительно выполнено с возможностью выдачи навигационных команд на самоходные модули 200, корпуса 210 которых формируют по меньшей мере два трехмерных элемента, с обеспечением возможности перестроения этих самоходных модулей 200 для объединения указанных трехмерных элементов по меньшей мере в один единый трехмерный объект.
Согласно иному варианту реализации настоящего изобретения, корпус 210 по меньшей мере одного или каждого из самоходных модулей 200, входящих в состав системы 500-2 и используемых для формирования трехмерного объекта 300, может быть дополнительно снабжен одним или более дисплеями (не показаны), а управляющее устройство системы 500-2 может быть дополнительно выполнено с возможностью выдачи данных об изображении на указанный по меньшей мере один самоходный модуль 200 с обеспечением возможности отображения указанного изображения по меньшей мере на одном из их дисплеев. Каждый из дисплеев в самоходных модулях 200 может представлять собой один из группы дисплеев, содержащей: LCD-дисплей, LED-дисплей, OLED-дисплей, AMOLED-дисплей, DLP-дисплей, TFT-дисплей, IPS-дисплей, TN-дисплей, STN-дисплей, CSTN-дисплей, FSTN-дисплей, DSTN-дисплей, DLP-дисплей, TFD-дисплей, LTPS-дисплей, UFB-дисплей, CRT-дисплей, PDP-дисплей, лазерный дисплей и т.п. Следует отметить, что изображение, отображаемое на каждом из дисплеев самоходных модулей 200 с дисплеем, может представлять собой статическое изображение (например, фотографию, чертеж, рисунок и т.п.) или динамическое изображение (например, клип, презентацию, видеофильм, анимированное изображение и т.п.). Кроме того, изображение, отображаемое на каждом из дисплеев самоходных модулей 200 с дисплеем, может представлять собой двухмерное изображение, трехмерное изображение или их комбинацию, при этом такое двухмерное или трехмерное изображение может быть по меньшей мере частично подвижным.
Согласно некоторому другому варианту реализации настоящего изобретения, корпус 210 по меньшей мере одного или каждого из самоходных модулей 200, входящих в состав системы 500-2, может быть дополнительно снабжен одним или более экранами, система 500-2 может дополнительно содержать проекционное устройство (не показано), а управляющее устройство системы 500-2 может быть дополнительно выполнено с возможностью выдачи данных об изображении на указанное проекционное устройство с обеспечением возможности проецирования указанного изображения по меньшей мере на одном из указанных экранов, относящихся к указанному по меньшей мере одному самоходному модулю с экранами.
Согласно некоторому иному варианту реализации настоящего изобретения, корпус 210 по меньшей мере одного или каждого из самоходных модулей 200, входящих в состав системы 500-2, может быть дополнительно снабжен одним или более экранами и проекционным устройством (не показано), а управляющее устройство системы 500-2 может быть дополнительно выполнено с возможностью выдачи данных об изображении на указанное проекционное устройство с обеспечением возможности проецирования указанного изображения по меньшей мере на одном из указанных экранов, относящихся к указанным самоходным модулям с экранами.
Согласно другим вариантам реализации настоящего изобретения, система 500-2 может дополнительно содержать проекционное устройство (не показано), при этом управляющее устройство системы 500-2 может быть дополнительно выполнено с возможностью выдачи данных об изображении на проекционное устройство системы 500-2 с обеспечением возможности проецирования указанного изображения по меньшей мере на одном из корпусов 210 самоходных модулей, которые формируют трехмерный объект 300.
Согласно иным вариантам реализации настоящего изобретения, корпус 210 по меньшей мере одного или каждого из самоходных модулей 200, входящих в состав системы 500-2, может быть снабжен проекционным устройством (не показано), а управляющее устройство системы 500-2 может быть дополнительно выполнено с возможностью выдачи данных об изображении на указанное проекционное устройство с обеспечением возможности проецирования указанного изображения на указанном корпусе 210 или нескольких корпусах 210 самоходных модулей.
Согласно некоторым другим вариантам реализации настоящего изобретения, система 500-2 может дополнительно содержать подвижную или стационарную несущую конструкцию (не показана), которая может быть выполнена с возможностью размещения на ней одного или более из самоходных модулей 200, направленных управляющим устройством системы 500-2 в заданную область пространства, с обеспечением формирования трехмерного объекта 300 из корпусов 210 указанных размещенных самоходных модулей в соответствии с моделью трехмерного объекта или из корпусов 210 указанных размещенных самоходных модулей и указанной несущей конструкции (не показана) в соответствии с моделью трехмерного объекта. В одной из разновидностей данного варианта реализации настоящего изобретения подвижная или стационарная несущая конструкция системы 500-2 может быть снабжена одной или более парковочными площадками (не показаны), выполненными с возможностью размещения на каждой из них по меньшей мере одного из самоходных модулей 200, направленных управляющим устройством системы 500-2 в заданную область пространства. В другой разновидности данного варианта реализации настоящего изобретения подвижная или стационарная несущая конструкция системы 500-2 может быть снабжена по меньшей мере одним крепежным средством, выполненным с возможностью взаимодействия по меньшей мере с одним из самоходных модулей 200, направленных управляющим устройством системы 500-2 в заданную область пространства. Еще в одной разновидности данного варианта реализации настоящего изобретения по меньшей мере один из самоходных модулей 200, направленных управляющим устройством системы 500-2 в заданную область пространства, может быть снабжен одним или более крепежными средствами (не показаны), выполненными каждое с возможностью взаимодействия с подвижной или стационарной несущей конструкцией системы 500-2.
Согласно некоторым иным вариантам реализации настоящего изобретения, одна или более из парковочных станций 100, входящих в состав системы 500-2, может быть дополнительно снабжена одним или более зарядными устройствами (не показано), а управляющее устройство системы 500-2 может быть дополнительно выполнено с возможностью направления одного или более из самоходных модулей 200, которые входят в состав системы 500-2 и корпуса 210 которых формируют трехмерный объект 300, по меньшей мере на одну из указанных парковочных станций 100 с обеспечением возможности подключения каждого из указанных направленных самоходных модулей по меньшей мере к одному из указанных зарядных устройств для восполнения его запаса хода.
Согласно некоторым вариантам реализации настоящего изобретения, в которых один или более из самоходных модулей 200, которые входят в состав системы 500-2 и корпуса 210 которых формируют трехмерный объект 300, могут быть снабжены каждый двумя или более движителями 220, управляющее устройство системы 500-2 может дополнительно обеспечивать возможность выключения по меньшей мере одного из указанных движителей 220 при нахождении каждого из указанных самоходных модулей 200 с движителями в составе сформированного трехмерного объекта 300.
Согласно различным вариантам реализации настоящего изобретения, один или более или каждый из самоходных модулей 200, которые входят в состав системы 500-2 и корпуса 210 которых формируют трехмерный объект 300, может быть снабжен модулем определения местоположения (не показан), выполненным с возможностью определения географических координат указанных самоходных модулей 200 в реальном времени и с возможностью выдачи определенных координат на управляющее устройство системы 500-2, а управляющее устройство системы 500-2 может быть дополнительно выполнено с возможностью выявления отклонения пространственного местоположения или пространственного смещения по меньшей мере части сформированного трехмерного объекта 300 на основании данных о географических координатах самоходных модулей и заданной модели трехмерного объекта и выполнено с возможностью перемещения только тех самоходных модулей 200, которые соответствуют указанной отклоненной или смещенной части трехмерного объекта 300, для их возврата в их первоначальные пространственные местоположения в соответствии с указанной моделью трехмерного объекта.
Согласно различным другим вариантам реализации настоящего изобретения, корпус 210 по меньшей мере одного или каждого из самоходных модулей 200, которые входят в состав системы 500-2 и которые использованы для формирования трехмерного объекта 300, может быть снабжен по меньшей мере одним датчиком силы (не показан), выполненным с возможностью измерения в реальном времени усилия, прикладываемого пользователем к указанному корпусу 210, и с возможностью выдачи измеренного усилия на управляющее устройство системы 500-2 в реальном времени, а управляющее устройство системы 500-2 может быть дополнительно выполнено с возможностью смещения каждого самоходного модуля 200, к корпусу 210 которого приложено усилие, в зависимости от величины указанного измеренного усилия для изменения формы, пространственного местоположения и/или пространственной ориентации трехмерного объекта 300.
В одном из вариантов реализации настоящего изобретения по меньшей мере часть (например, два или более) или каждый из корпусов 210 самоходных модулей 200, которые входят в состав системы 500-2 и которые формируют трехмерный объект 300, могут быть выполнены с возможностью их смещения пользователем по отношению друг к другу и/или по отношению к остальным корпусам 210 из указанных корпусов самоходных модулей 200 (т.е. по отношению к одному или более корпусов 210, относящихся к самоходным модулям, которые также использованы для формирования трехмерного объекта 300, но корпуса 210 которых не изменяют каждый свое пространственное местоположение в случае, если пользователь прикладывает к нему подобное смещающее усилие, или в ответ на управляющие команды управляющего устройства системы 500-2).
В другом варианте реализации настоящего изобретения в системе 500-2 может быть обеспечена возможность добавления по меньшей мере одного дополнительного самоходного модуля к самоходным модулям 200, которые входят в состав системы 500-2 и корпуса 210 которых формируют трехмерный объект 300, или возможность удаления по меньшей мере одного самоходного модуля из самоходных модулей 200, корпуса 210 которых формируют трехмерный объект 300, по меньшей мере для частичного изменения указанного трехмерного объекта 300.
Еще в одном варианте реализации настоящего изобретения по меньшей мере один из самоходных модулей 200, которые входят в состав системы 500-2 и корпуса 210 которых формируют трехмерный объект 300, может быть снабжен модулем определения местоположения (не показан), выполненным с возможностью определения в реальном времени пространственных координат указанного по меньшей мере одного самоходного модуля 200 вис возможностью выдачи определенных пространственных координат на управляющее устройство системы 500-2, а управляющее устройство системы 500-2 в свою очередь может быть дополнительно выполнено с возможностью изменения модели трехмерного объекта на основании указанных определенных пространственных координат самоходного модуля при их отклонении от первоначальных пространственных координат, соответствующих первоначальной модели трехмерного объекта. Таким образом, если сформированный трехмерный объект 300, соответствующий конкретной модели трехмерного объекта, был по меньшей мере частично изменен путем добавления по меньшей мере одного дополнительного самоходного модуля к самоходным модулям 200, корпуса 210 которых формируют трехмерный объект 300, и/или путем удаления по меньшей мере одного самоходного модуля из самоходных модулей 200, корпуса 210 которых формируют трехмерный объект 300, то модули определения местоположения (не показаны) по сути позволяют отследить структурные изменения ранее сформированного трехмерного объекта 300 и, следовательно, уточнить или изменить первоначальную модель трехмерного объекта, которая была использована при формировании указанного ранее сформированного трехмерного объекта 300. При дальнейшем использовании уточненной модели трехмерного объекта, которая может быть записана в соответствующую базу данных или сохранена на соответствующем запоминающем устройстве вместо первоначальной модели трехмерного объекта или в дополнение к ней, управляющее устройство системы 500-2 обеспечит возможность формирования в заданной области пространства уже измененного трехмерного объекта, который будет соответствовать уточненной модели трехмерного объекта и в котором будут учтены все возможные вышеописанные манипуляции, проведенные со структурой первоначально сформированного трехмерного объекта 300.
В ином варианте реализации настоящего изобретения система 500-2 может дополнительно содержать сканирующее устройство (не показано), выполненное с возможностью сканирования измененного трехмерного объекта и с возможностью выдачи скана трехмерного объекта на управляющее устройство системы 500-2, а управляющее устройство системы 500-2 может быть дополнительно выполнено с возможностью формирования или обновления модели трехмерного объекта на основании указанного скана. Таким образом, если сформированный трехмерный объект 300, соответствующий конкретной модели трехмерного объекта, был по меньшей мере частично изменен путем добавления по меньшей мере одного дополнительного самоходного модуля к самоходным модулям 200, корпуса 210 которых формируют трехмерный объект 300, и/или путем удаления по меньшей мере одного самоходного модуля из самоходных модулей 200, корпуса 210 которых формируют трехмерный объект 300, то сканирующее устройство системы 500-2 позволяет отследить структурные изменения ранее сформированного трехмерного объекта 300 и, следовательно, уточнить или изменить первоначальную модель трехмерного объекта, которая была использована при формировании указанного ранее сформированного трехмерного объекта 300, на основании скана, полученного в результате сканирования измененного трехмерного объекта с использованием сканирующего устройства системы 500-2.
В некотором ином варианте реализации настоящего изобретения может быть дополнительно обеспечена возможность прикрепления одного или более конструкционных модулей (не показаны) по меньшей мере к одному из самоходных модулей 200, которые входят в состав системы 500-2 и корпуса 210 которых формируют трехмерный объект 300, по меньшей мере для частичного изменения геометрии трехмерного объекта 300. В одной из разновидностей данного варианта реализации настоящего изобретения по меньшей мере один из самоходных модулей 200, к каждому из которых прикрепляют по меньшей мере один конструкционный модуль (не показан), может быть дополнительно снабжен по меньшей мере одним крепежным или соединительным элементом, обеспечивающим возможность прикрепления указанного конструкционного модуля к указанному по меньшей мере одному самоходному модулю 200. В другой разновидности данного варианта реализации настоящего изобретения по меньшей мере один из самоходных модулей 200, к каждому из которых прикрепляют по меньшей мере один конструкционный модуль (не показан), может быть дополнительно снабжен по меньшей мере одним захватом (не показан), выполненным с возможностью захвата указанного по меньшей мере одного конструкционного модуля и дополнительно выполненным с возможностью перемещения и/или позиционирования указанного захваченного конструкционного модуля по меньшей мере для частичного изменения геометрии трехмерного объекта 300.
Функционирование системы для формирования трехмерного объекта
На фиг. 2 для наглядности также показаны шесть иллюстративных положений (А, В, С, D, Е, F), которые может принимать каждый самоходный модуль 200 в системе 500-2 для формирования трехмерного объекта в процессе его перемещения по воздуху, по суше (земле), по воде, под водой и/или по поверхности стационарного или подвижного физического объекта, находящегося по меньшей мере в одном из воздушного пространства, наземного пространства, надводного пространства и подводного пространства, от начального пункта перемещения до конечного пункта перемещения в рамках одного цикла перемещения такого самоходного модуля 200.
В положении (А) на фиг. 2 каждый из самоходных модулей 200, входящих в состав системы 500-2, размещен с целью парковки, хранения или восполнения запаса хода в соответствующей одной из парковочных станций 100, входящих в состав системы 500-2, и ожидает получения навигационных и/или управляющих команд от управляющего устройства системы 500-2. Положение (А) по сути соответствует начальному пункту перемещения самоходного модуля 200 и соответствует началу цикла перемещения этого самоходного модуля 200.
В положении (В) на фиг. 2, которое каждый из самоходных модулей 200, входящих в состав системы 500-2, может занять после нахождения в положении (А) в ответ на соответствующие навигационные команды управляющего устройства системы 500-2, которые в свою очередь могут быть сформированы, например, в ответ на запрос пользовательского устройства, самоходные модули 200 с полным запасом хода (если используются впервые в рамках данного цикла) или частичным запасом хода (если имеет остаточный запас хода, достаточный для продолжения его использования без необходимости в зарядке или восполнении запаса хода) или самоходные модули 200 с восполненным запасом хода (если используются повторно в рамках данного цикла, т.е. после восполнения запаса хода с использованием зарядного устройства) оказываются выпущенными из соответствующих парковочных станций 100 в требуемом количестве, достаточном для формирования трехмерного объекта 300 в соответствии с заданной моделью трехмерного объекта, с образованием в области пространства, находящейся на удалении от указанных парковочных станций 100, одной или более входных групп самоходных модулей (см. слева на фиг. 2). Следует отметить, что для занятия вышеописанного положения (В) выход (например, вылетание, выезжание, выплывание, выпрыгивание, выкатывание, выползание или т.п.) самоходных модулей 200 из одной и той же парковочной станции 100 может происходить последовательно, а выход указанных самоходных модулей 200 из разных парковочных станций 100 может происходить по существу одновременно или последовательно.
В положении (С) на фиг. 2, которое каждый из самоходных модулей 200, входящих в состав системы 500-2, может занять после нахождения в положении (В) в ответ на соответствующие навигационные команды управляющего устройства системы 500-2, каждый самоходный модуль 200, относящийся к одной из входных групп самоходных модулей, образованных в вышеописанном положении (В), направляется управляющим устройством системы 500-2 в заданную область пространства, в которой предполагается сформировать трехмерный объект 300, отдельно от своей входной группы самоходных модулей (см. слева на фиг. 2).
В положении (D) на фиг. 2, которое каждый из самоходных модулей 200, входящих в состав системы 500-2, может занять после нахождения в положении (С) в ответ на соответствующие навигационные команды управляющего устройства системы 500-2, каждый самоходный модуль 200, направленный управляющим устройством системы 500-2 в заданную область пространства, в которой предполагается сформировать трехмерный объект 300, размещается в заданном пространственном местоположении в соответствии с заданной моделью трехмерного объекта, в котором указанный самоходный модуль 200 уже находится в составе совокупности самоходных модулей, формирующих трехмерный объект 300, и занимает конкретное место в составе трехмерного объекта 300 в соответствии с моделью трехмерного объекта (см. по центру на фиг. 2), образуя тем самым одну из составных частей такого трехмерного объекта 300.
В положении (Е) на фиг. 2, которое каждый из самоходных модулей 200, входящих в состав системы 500-2, может занять после нахождения в положении (D) в ответ на соответствующие навигационные команды управляющего устройства системы 500-2, самоходные модули 200 выходят (например, вылетают, выезжают, выплывают, выпрыгивают, выкатываются, выползают или т.п.) каждый из состава совокупности самоходных модулей 200, формирующих трехмерный объект 300 в заданной области пространства (например, при расформировании трехмерного объекта 300, перестроении трехмерного объекта 300 или при направлении такого самоходного модуля 200 для восполнения его запаса хода), по существу одновременно или последовательно с обеспечением возможности их направления управляющим устройством системы 500-2 в сторону парковочных станций 100, входящих в состав системы 500-2 (см. справа на фиг. 2).
В положении (F) на фиг. 2, которое каждый из самоходных модулей 200, входящих в состав системы 500-2, может занять после нахождения в положении (Е) в ответ на соответствующие навигационные команды управляющего устройства системы 500-2, самоходные модули 200, направленные управляющим устройством системы 500-2 в сторону парковочных станций 100, оказываются в области пространства, находящейся на удалении от указанных парковочных станций 100, с обеспечением формирования одной или более выходных групп самоходных модулей в указанной области пространства (см. справа на фиг. 2).
В заключение, как показано на фиг. 2, в положении (А) на фиг. 2, которое каждый из самоходных модулей 200, занявших свое положение в составе одной из выходных групп самоходных модулей рядом с парковочными станциями 100, переходит из положения (F) в ответ на соответствующие навигационные команды управляющего устройства системы 500-2, указанные самоходные модули выходят каждый из состава своих выходных групп самоходных модулей по существу одновременно или последовательно с обеспечением возможности их размещения по меньшей мере в одной из парковочных станций 100, в частности по меньшей мере в одной из парковочных станций 100, имеющих свободные или незанятые зарядные устройства. Таким образом, в заключение каждый из самоходных модулей 200 снова занимает положение (А), при этом перед этим осуществляют отключение любых дополнительных двигателей или движителей (при наличии) и складывают любые вышеописанные вспомогательные средства для перемещения самоходного модуля (например, крылья, гусеничный трак, парус, шасси и/или т.п.) с последующим переходом к осуществлению процесса перемещения этого самоходного модуля 200 в или на соответствующую одну из парковочных станций 100. Следует отметить, что в положении (А), в которое возвращается каждый самоходный модуль 200, этот самоходный модуль 200 находится в неподвижном состоянии с выключенными движителями 220 и сложенными вспомогательными средствами для перемещения самоходного модуля (не показаны). При занятии положения (А) блок питания самоходного модуля 200 может быть подключен к зарядному устройству парковочной станции 100 с обеспечением возможности восполнения запаса хода этого самоходного модуля 200 и обеспечением возможности последующего хранения этого самоходного модуля 200 в парковочной станции до момента получения от управляющего устройства системы 500-2 новых навигационных команд на выход из своей парковочной станции 100 с направлением в заданную область пространства для формирования в ней того же самого трехмерного объекта 300 или с направлением в новую область пространства для формирования в ней нового трехмерного объекта, который может совпадать с трехмерным объектом 300 или отличаться от него.
На фиг. 6 схематично показан обобщенный вариант реализации системы 500-3 для формирования трехмерного объекта согласно настоящему изобретению, при этом описание частных или альтернативных вариантов реализации, описанных выше в отношении системы 500-2 для формирования трехмерного объекта согласно настоящему изобретению, показанной на фиг. 2, следует считать относящимся и к системе 500-3.
В частности, система 500-3 обеспечивает возможность формирования трехмерного объекта 300 в заданной полости, например, в естественном или искусственном углублении (например, в яме, реке, овраге, выбоине, разломе между льдинами и т.п.) (показано на Фиг. 6) или в форме/каркасе/корпусе (например, форма для литья, форма для заливки, внутреннее пространство корпуса устройства, внутреннее пространство помещения в здании, полость, ограниченная каркасом, опалубкой и т.д.). Таким образом, полость, для применения заявляемой системы может иметь различный объем, например, от нескольких мм3 или см3, одного или нескольких м3 или десятков или даже сотен м3. Техническая возможность заполнения подобных полостей самоходными модулями 200 обусловлена текущим уровнем развития техники и отдельных компонентов, при этом возможно и дальнейшее усовершенствование отдельных элементов системы, в том числе в части минимального и/или максимального размера самоходных модулей, а также их отдельных элементов, которые могут аналогичным образом найти применение в заявляемом техническом решении. Форма полости никак конкретно не ограничена, кроме того, размер и/или форма полости могут динамически изменяться. Например, форма разломов между льдинами при движении льда, эластичная форма для заливки, или гибкий/подвижный каркас и т.д.
Полость содержит проем, ограниченный краями полости и выполненный с возможностью прохождения корпуса самоходного модуля в полость.
Полость может иметь предварительно определенные (известные) размеры в соответствии с одной из моделей трехмерного объекта, выбранной пользователем с использованием стандартных средств ввода-вывода пользовательского устройства среди доступных моделей трехмерных объектов, предварительно созданных для указанной полости с обеспечением их сохранения в базу моделей трехмерных объектов, к которой имеет доступ или может получить доступ пользовательское устройство, и отображенных на дисплее этого пользовательского устройства в качестве подходящих для данного типа места формирования трехмерных объектов, при этом пользовательское устройство может дополнительно входить в состав системы 500-3.
В альтернативном варианте осуществления размер полости может быть не известен (не определен) заранее и не задан заранее, при этом модель трехмерного объекта 300 представляет собой модель по меньшей мере одной поверхности трехмерного объекта. По меньшей мере одна поверхность трехмерного объекта, например, может быть расположена между краями полости в проеме. В этом случае самоходные модули 200 направляют в заданную область пространства, в которой расположена полость, и корпуса самоходных модулей 200 заполняют полость. В ответ на заполнение полости самоходными модулями 200 до краев полости в области проема образуют по меньшей мере одну поверхность заполненной полости, являющуюся по меньшей мере одной поверхностью сформированного трехмерного объекта, например, поверхность для прохождения транспорта через яму или овраг, как показано в неограничивающем иллюстративном примере на Фиг. 6.
В ответ на изменение формы или размера полости и соответствующее изменение по меньшей мере одной поверхности трехмерного объекта, например, при движении льда в разломе, управляющее устройство системы выполнено с возможностью восстановления по меньшей мере одной поверхности трехмерного объекта посредством добавления по меньшей мере одного дополнительного самоходного модуля ко множеству самоходных модулей, корпуса которых заполняют полость, или посредством удаления по меньшей мере одного самоходного модуля из самоходных модулей, корпуса которых заполняют полость. Возможен вариант осуществления, согласно которому, система дополнительно содержит сканирующее устройство, выполненное с возможностью сканирования по меньшей мере одной поверхности трехмерного объекта и с возможностью выдачи скана по меньшей мере одной поверхности трехмерного объекта на управляющее устройство, а управляющее устройство дополнительно выполнено с возможностью восстановления по меньшей мере одной поверхности трехмерного объекта на основании указанного скана. Восстановление поверхности трехмерного объекта в иллюстративном примере на Фиг. 6 может выражаться в восстановлении поверхности для проезда транспортного средства при возникновении выступов при выталкивании одного или нескольких самоходных модулей на поверхность и/или наоборот при образовании впадин на поверхности при заглублении/вдавливании одного или нескольких самоходных модулей 200.
Возможен вариант осуществления, согласно которому по меньшей мере один из указанных самоходных модулей выполнен с возможностью его размещения в полости и снабжен сканирующим устройством, выполненным с возможностью сканирования по меньшей мере одной поверхности трехмерного объекта и/или сканирования указанной полости и/или определения положения краев полости с получением скана по меньшей мере одной поверхности трехмерного объекта или трехмерного объекта или краев полости соответственно.
Возможен вариант осуществления, согласно которому самоходный модуль дополнительно содержит блок управления с образованием опорного самоходного модуля, соединенный с возможностью обмена данными со сканирующим устройством и самоходными модулями и выполненный с возможностью направления по меньшей мере части из указанных самоходных модулей к указанному опорному самоходному модулю в количестве, соответствующем трехмерной модели полости или по меньшей мере одной поверхности трехмерного объекта, с обеспечением заполнения указанными направленными самоходными модулями указанной полости и с образованием заданного трехмерного объекта или по меньшей мере одной заданной поверхности трехмерного объекта.
Следует отметить, что задача, которая может быть решена с использованием системы 500-3, заключается в создании из корпусов самоходных модулей 200 трехмерного объекта 300 в виде переправы, моста, понтона, перехода или тому подобного сооружения, позволяющего транспортному средству (например, мотоциклу), переехать через яму, реку, овраг, выбоину, разлом между льдинами и т.п. В частности, как показано на фиг. 6, поставленная задача решена путем заполнения углубления самоходными модулями 200 в соответствии с моделью формирования трехмерного объекта или моделью формирования по меньшей мере одной поверхности трехмерного объекта, соответствующей указанной полости размер и форма которой могут быть известны или неизвестны заранее.
Как показано на фиг. 6, система 500-3 содержит самоходные модули 200, каждый из которых снабжен корпусом 210 и воздушным движителем 220 для обеспечения возможности перемещения по воздуху (полета) и колесную базу 240 для обеспечения возможности перемещения по поверхности земли (по суше) и которые первоначально размещены по меньшей мере в одной из парковочных станций (не показаны), также входящих в состав системы 500-3, и дополнительно содержит опорный (референтный) самоходный модуль 200-R, который снабжен шарообразным корпусом 210 и двумя воздушными движителями 220, установленными внутри шарообразного корпуса 210, и который по сути задает опорное (референтное) пространственное местоположение для формирования трехмерного объекта 300 в углублении. Кроме того, опорный (референтный) самоходный модуль 200-R дополнительно содержит блок управления (не показан), выполненный с возможностью установления связи с пользовательским устройством с обеспечением возможности взаимного обмена данными. Следует отметить, что опорный самоходный модуль 200-R может быть первоначально размещен в одной из парковочных станций системы 500-3 аналогично самоходным модулям 200, используемым для формирования трехмерного объекта 300, или может находиться в любом другом месте или любой другой области пространства, в которой между опорным самоходным модулем 200-R и пользовательским устройством системы может быть установлена связь с возможностью взаимного обмена данными.
Для задания опорного (референтного) местоположения пользователь выбирает, посредством стандартных средств ввода-вывода своего пользовательского устройства, на трехмерной карте местности или карте окружающего пространства, предварительно созданной с обеспечением ее сохранения в базу карт окружающего пространства, к которой имеет доступ или может получить доступ пользовательское устройство, отображаемой на дисплее этого пользовательского устройства, при этом указанная карта окружающего пространства иллюстрирует трехмерное изображение окружающего пространства с находящимися в нем объектами, в том числе с углублением, в котором должен быть сформирован трехмерный объект 300, соответствующий ранее выбранной пользователем модели трехмерного объекта. В ответ данные о выбранном пользователем месте формирования трехмерного объекта (т.е. углубление в качестве иллюстративного примера), выдаваемые пользовательским устройством (не показано) на блок управления опорного (референтного) самоходного модуля 200-R, блок управления этого опорного самоходного модуля 200-R включает или приводит в действие движители 220 самоходного модуля 200-R с обеспечением перемещения по воздуху (полета) указанного опорного самоходного модуля 200-R в сторону указанного углубления и его последующего приземления на дно этого углубления с обеспечением задания опорного местоположения (либо его приводнения на поверхность воды или иной текучей среды, находящейся в углублении, с обеспечением задания опорного местоположения, либо его зависания в воздухе или воздушном пространстве в пределах углубления с обеспечением сохранения или поддержания своего пространственного местоположения, задающего опорное местоположение). После размещения опорного самоходного модуля 200-R в опорном местоположении в пределах углубления блок управления опорного самоходного модуля 200-R выдает данные об опорном местоположении, заданном опорным самоходным модулем 200-R и соответствующем выбранному пользователем месту формирования трехмерного объекта, на самоходные модули 200 в парковочных станциях системы 500-1. В ответ на данные об опорном местоположении для формирования трехмерного объекта, самоходные модули 200 направляются из своих парковочных станций системы 500-1 под управлением своих блоков управления или под управления блока управления опорного самоходного модуля 200-R в заданную область пространства, соответствующую указанному опорному местоположению, в количестве, соответствующем ранее выбранной пользователем модели трехмерного объекта, с обеспечением последовательной или одновременной посадки указанных направленных самоходных модулей 200 и их последующего последовательного или одновременного перемещения по земле (по суше) непосредственно до самого углубления, в котором должен быть сформирован трехмерный объект 300. При достижении края или краев углубления, в котором должен быть сформирован трехмерный объект 300, направленные самоходные модули 200 попадают (например, скатываются, съезжают, заплывают, падают, въезжают или т.п.) в указанное углубление с обеспечением размещения указанных направленных самоходных модулей 200 в заданных пространственных местоположениях с привязкой к опорному самоходному модулю 200-R. Таким образом, пространственное местоположение каждого из самоходных модулей 200, используемых для формирования трехмерного объекта 300 в углублении, задано через величину пространственного смещения (т.е. смещение по меньшей мере по одной из трех координатных осей) по отношению к опорному местоположению, занятому опорным самоходным модулем 200-R, а опорный самоходный модуль 200-R лежит в основе трехмерного объекта 300, формируемого в углублении из корпусов самоходных модулей 200.
В качестве альтернативы пользователь может вручную (в том числе с использованием вспомогательных инструментов, приспособлений или устройств) разместить опорный (референтный) самоходный модуль 200-R в желаемом месте (например, на дне углубления, на поверхности воды или иной текучей среды в углублении или в заданном местоположении в воздушном пространстве углубления, предварительно включив по меньшей мере один из движителей 220 опорного самоходного модуля 200-R), которое по сути будет представлять собой опорное (референтное) местоположение для формирования трехмерного объекта 300, так что опорный самоходный модуль 200-R может выдать данные об опорном местоположении на самоходные модули 200 с обеспечением возможности размещения указанных самоходных модулей 200 в заданных пространственных местоположениях с привязкой к опорному самоходному модулю 200-R. В одной из разновидностей данного альтернативного варианта реализации системы 500-3 опорный самоходный модуль 200-R может дополнительно содержать модуль определения местоположения (например, GPS-систему, Глонасс-систему, Beidou-систему или любую иную подходящую систему определения местоположения, известную в уровне техники), выполненный с возможностью определения пространственных координат указанного опорного самоходного модуля 200-R в реальном времени, и может быть дополнительно выполнен с возможностью выдачи определенных пространственных координат на самоходные модули 200, используемые для формирования трехмерного объекта 300, для уточнения или корректировки пространственных координат области пространства, в которую должны быть направлены самоходные модули 200 из соответствующих парковочных станций системы 500-1 в количестве, соответствующем выбранной пользователем модели трехмерного объекта, и/или уточнения или корректировки по меньшей мере одного из пространственных местоположений, которые должны занять указанные направленные самоходные модули 200 по отношению к опорному местоположению, занимаемому опорным самоходным модулем 200-R, при формировании трехмерного объекта 300. Еще в одной разновидности данного альтернативного варианта реализации системы 500-3 опорный самоходный модуль 200-R может дополнительно содержать сканирующий блок (не показан), выполненный с возможностью создания трехмерной карты пространства, окружающего место, в котором автоматически или вручную был размещен опорный самоходный модуль 200-R и которое следует считать опорным местоположением для формирования трехмерного объекта 300 в углублении, и соединенный с возможностью обмена данными с блоком управления опорного самоходного модуля 200-R, так что блок управления опорного самоходного модуля 200-R может выдавать указанную трехмерную карту окружающего пространства на самоходные модули 200, используемые для формирования трехмерного объекта 300, для уточнения или корректировки пространственных координат области пространства, в которую должны быть направлены самоходные модули 200 из соответствующих парковочных станций системы 500-1 в количестве, соответствующем выбранной пользователем модели трехмерного объекта, и/или для уточнения или корректировки по меньшей мере одного из пространственных местоположений, которые должны занять указанные направленные самоходные модули 200 по отношению к опорному местоположению, занимаемому опорным самоходным модулем 200-R, при формировании трехмерного объекта 300, на основании указанной трехмерной карты окружающего пространства. Кроме того, блок управления опорного самоходного модуля 200-R может быть дополнительно выполнен с возможностью уточнения модели трехмерного объекта, соответствующей углублению, в котором должен быть сформирован трехмерный объект 300, на основании данных о трехмерной карте окружающего пространства, полученной блоком управления опорного самоходного модуля 200-R от сканирующего блока опорного самоходного модуля 200-R, что позволит уточнить или скорректировать количество самоходных модулей 200, необходимых для формирования трехмерного объекта 300, и/или уточнить или скорректировать пространственные местоположения указанных самоходных модулей 200 в случае изменения размеров, формы и/или контуров указанного углубления еще до направления самоходных модулей 200 к указанному углубления или до начала процесса формирования трехмерного объекта 300 в указанном углублении. Кроме того, сканирующий блок опорного самоходного модуля 200-R может быть установлен на выдвижном или телескопическом стержне, находящимся под управления блока управления опорного самоходного модуля 200-R, что позволяет сканировать поверхность сформированного в углублении трехмерного объекта 300, по которой транспортное средство должно переехать через указанное углубление, при этом блок управления опорного самоходного модуля 200-R может быть дополнительно выполнен с возможностью оценки на основании указанного скана поверхности, соответствует ли степень ровности указанной поверхности перемещения заданном пороговому значению, и с возможностью вывода по меньшей мере одного самоходного модуля 200 из состава трехмерного объекта 300 или возможностью добавления по меньшей мере одного самоходного модуля 200 в состав трехмерного объекта 300 для корректировки (в частности, сглаживания или обеспечения прямолинейности) указанной поверхности перемещения. Таким образом, сканирующий блок опорного самоходного модуля 200-R также позволяет использовать систему 500-3 для формирования трехмерных объектов 300 в динамически изменяющихся углублениях.
Следует отметить, что опорный (референтный) самоходный модуль 200-R, используемый в составе системы 500-3, может быть выполнен в виде самоходного модуля 200 в любом из его вариантов реализации, описанных в данном документе, или любого стационарного объекта, выполненного с возможностью его захвата или перемещения пользователем и снабженного блоком управления или приемопередатчиком, выполненным с возможностью обмена данными с самоходными модулями 200, входящими в состав системы 500-3 и используемыми для формирования трехмерного объекта 300, для выдачи на них данных об опорном (референтном) местоположении, занятом указанным объектом и используемом для задания пространственных местоположений для указанных самоходных модулей 200 при формировании трехмерного объекта 300.
Следует также отметить, что самоходные модули 200, парковочные станции (не показаны) и трехмерный объект 300, входящие в состав вышеописанной системы 500-3, показанной на фиг. 1, могут быть выполнены аналогично или идентично любому из вариантов реализации соответственно самоходных модулей 200, парковочных станций 100 и трехмерного объекта 300, описанных выше в данном документе в отношении системы 500-2 для формирования трехмерного объекта, показанной на фиг. 2.
Способ формирования трехмерного объекта
На фиг. 7 показана блок-схема, иллюстрирующая основные операции способа 600 формирования трехмерного объекта, при этом способ 600 формирования трехмерного объекта, показанный на фиг. 7, может быть выполнен с использованием системы 500-2 для формирования трехмерного объекта, в основе которой лежит самоходный модуль, показанный на фиг. 3, и которая может быть выполнена в соответствии с любым из релевантных вариантов реализации настоящего изобретения, описанных в данном документе (т.е. вариантов реализации настоящего изобретения, касающихся самоходного модуля 200 по фиг. 3 и вариантов реализации системы 500-2 для формирования трехмерного объекта, в основе которой лежит использование самоходных модулей 200 по фиг. 3 для формирования необходимого трехмерного объекта 300).
В частности, способ 600 формирования трехмерного объекта, показанный на фиг. 7, включает следующие три основные операции или основных этапа 610, 620 и 630, при этом на этапе 610 выдают навигационные команды и заданную модель трехмерного объекта на самоходные модули 300, каждый из которых имеет корпус 210; на этапе 620 в ответ на указанные навигационные команды направляют указанные самоходные модули 200 по меньшей мере из одной парковочной станции 100 в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных самоходных модулей 200 в заданном пространственном местоположении в соответствии с заданной моделью трехмерного объекта для формирования по меньшей мере одного трехмерного объекта 300 из корпусов 210 указанных размещенных самоходных модулей 200; и на этапе 630 выдают управляющие команды по меньшей мере на один из самоходных модулей 200, корпуса 210 которых формируют указанный трехмерный объект 300, с обеспечением возможности изменения формы и/или размера по меньшей мере части корпуса 210 указанного по меньшей мере одного самоходного модуля 200 для изменения геометрии указанного сформированного трехмерного объекта 300.
В одном из вариантов реализации настоящего изобретения способ 600 формирования трехмерного объекта, показанный на фиг. 7, может включать дополнительный этап, согласно которому вручную смещают по меньшей мере один из самоходных модулей 200, корпуса 210 которых формируют трехмерный объект 300.
В другом варианте реализации настоящего изобретения способ 600 формирования трехмерного объекта, показанный на фиг. 7, может включать дополнительный этап, согласно которому вручную добавляют по меньшей мере один дополнительный самоходный модуль к самоходным модулям 200, корпуса которых формируют трехмерный объект 300, или дополнительно вручную удаляют по меньшей мере один самоходный модуль из самоходных модулей 200, корпуса которых формируют трехмерный объект 300, для изменения указанного трехмерного объекта 300.
Еще в одном варианте реализации настоящего изобретения способ 600 формирования трехмерного объекта, показанный на фиг. 7, может включать дополнительный этап, согласно которому измеряют в реальном времени усилие, приложенное к корпусу 210 по меньшей мере одного из самоходных модулей 200, корпуса 210 которых формируют трехмерный объект 300, с использованием датчика силы (не показан), которым снабжен указанный корпус 210, и смещают указанный самоходный модуль 200 в зависимости от указанного измеренного усилия для изменения формы и/или пространственного местоположения трехмерного объекта 300.
В ином варианте реализации настоящего изобретения способ 600 формирования трехмерного объекта, показанный на фиг. 7, может включать дополнительный этап, согласно которому определяют в реальном времени пространственные координаты самоходных модулей 200, корпуса 210 которых формируют трехмерный объект 300, с использованием модулей определения местоположения, которыми снабжены указанные самоходные модули 200, и изменяют модель трехмерного объекта на основании указанных определенных пространственных координат самоходных модулей 200 при отклонении по меньшей мере одной из них от первоначальной модели трехмерного объекта.
В другом варианте реализации настоящего изобретения способ 600 формирования трехмерного объекта, показанный на фиг. 7, может включать дополнительный этап, согласно которому сканируют, посредством сканирующего устройства (не показано), измененный трехмерный объект и формируют или обновляют модель трехмерного объекта на основании полученного скана измененного трехмерного объекта.
Представленные иллюстративные варианты осуществления настоящего изобретения, примеры и описание служат лишь для обеспечения понимания сущности заявляемого изобретения и не являются ограничивающими. Иные возможные варианты осуществления настоящего изобретения, либо модификации или улучшения вышеописанных вариантов реализации настоящего изобретения будут ясны специалисту в данной области техники из представленного выше описания. Объем настоящего изобретения ограничен лишь прилагаемой формулой изобретения.
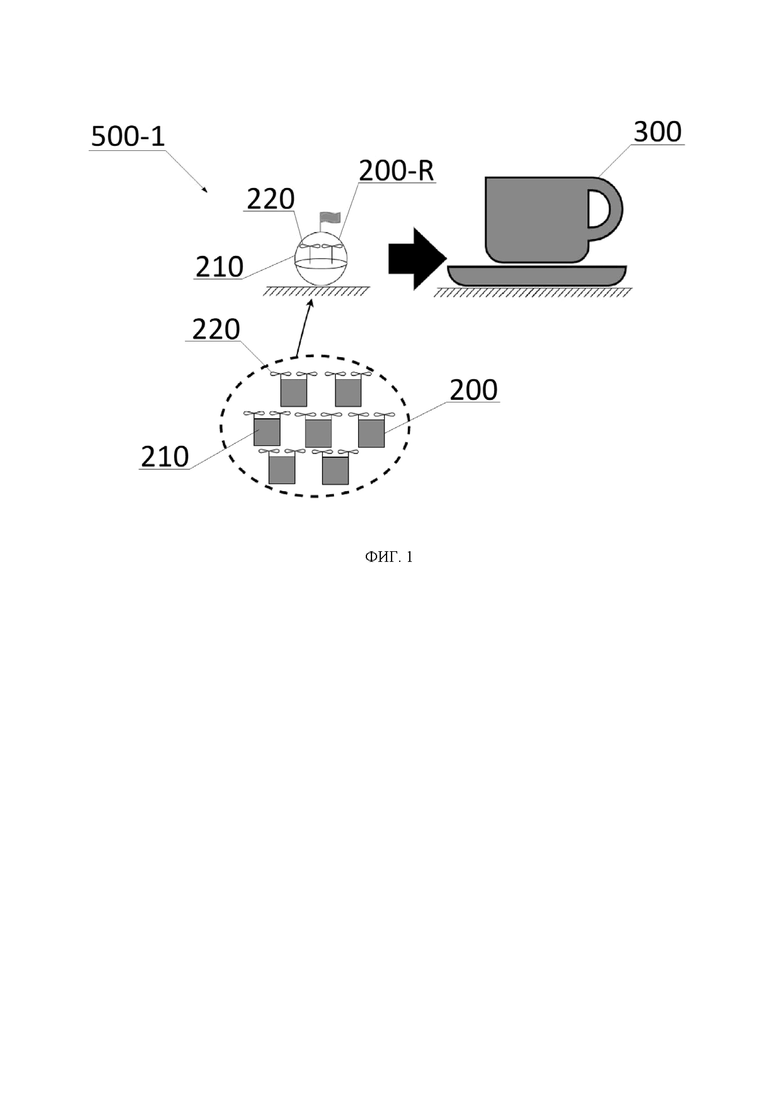
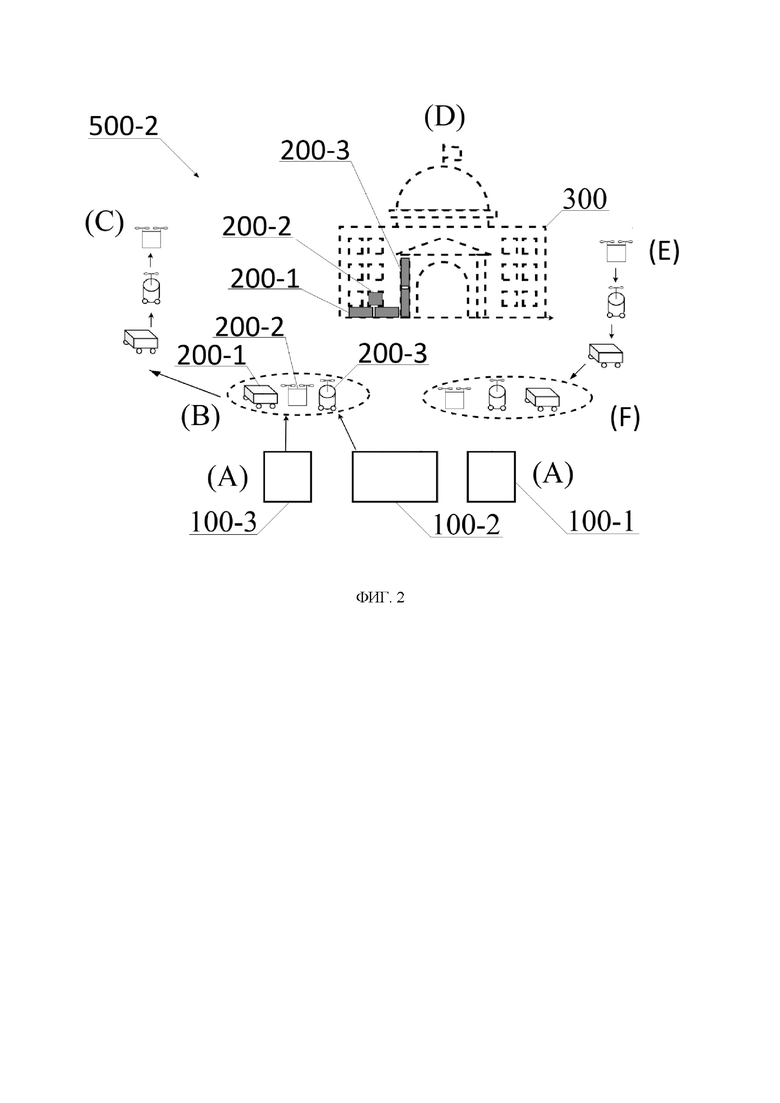
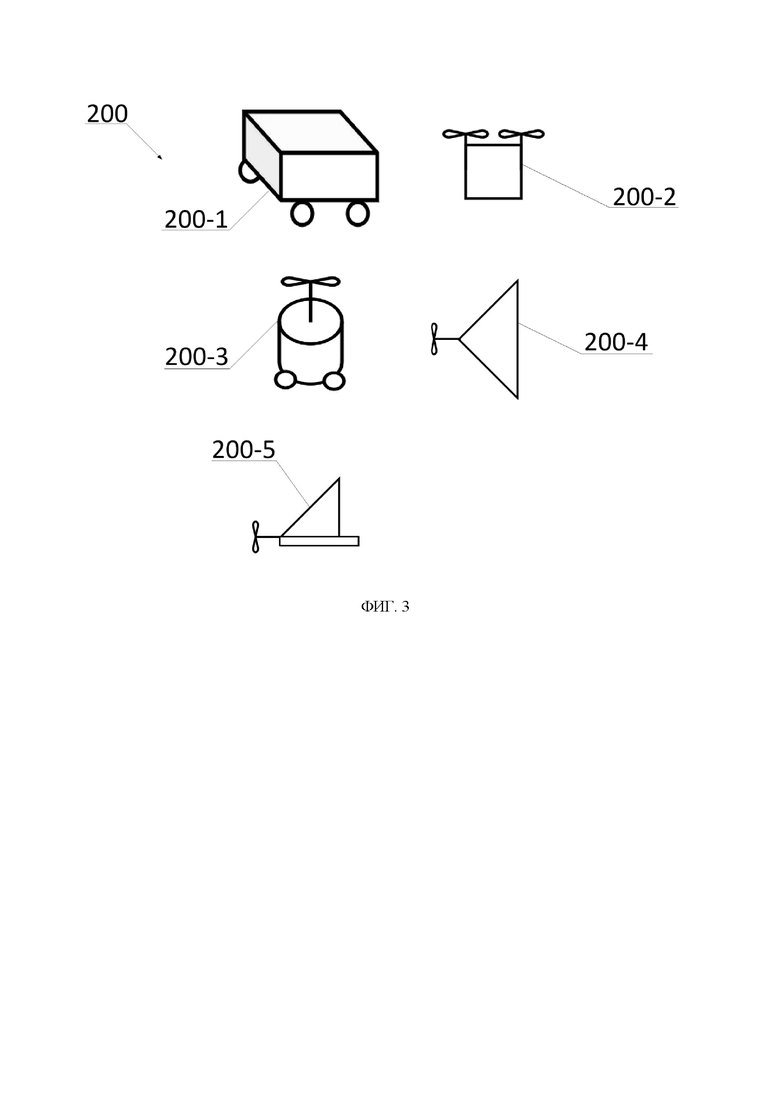
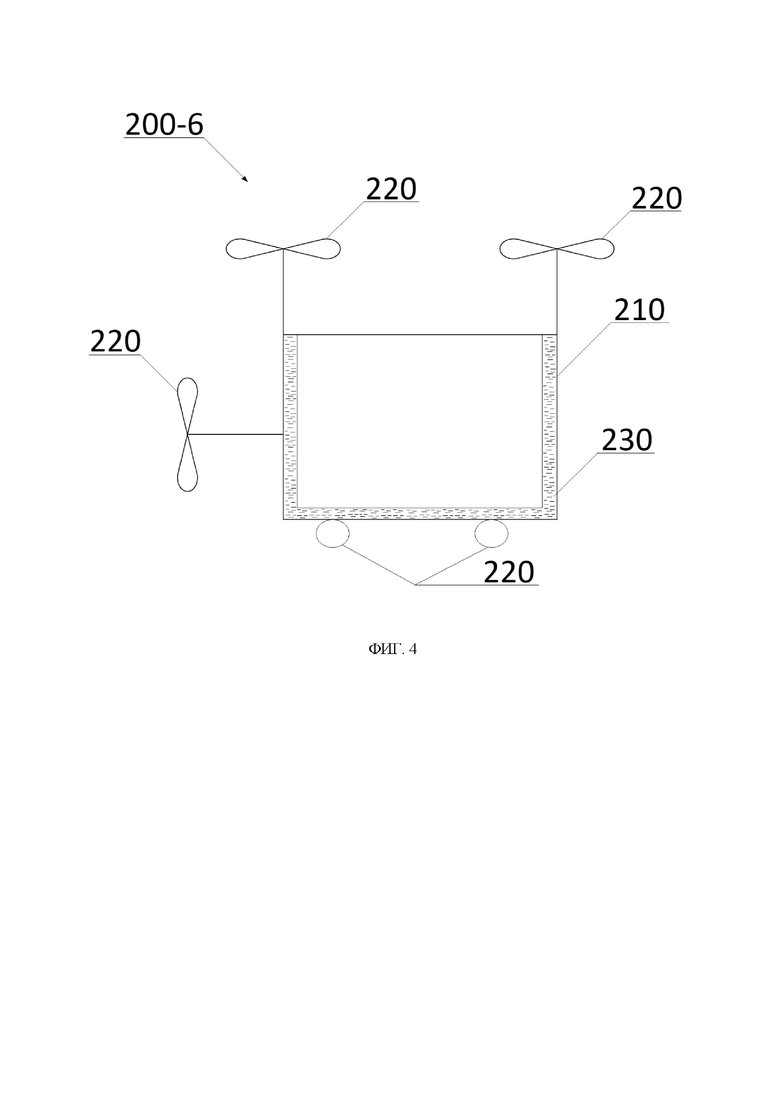

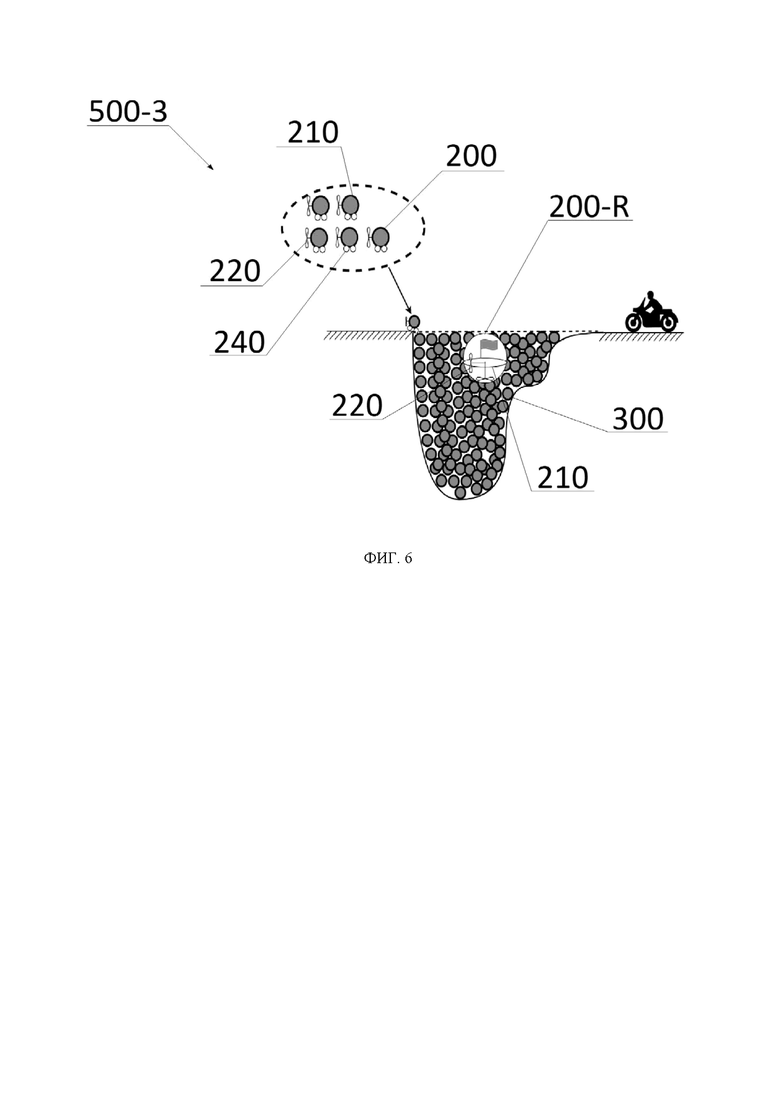
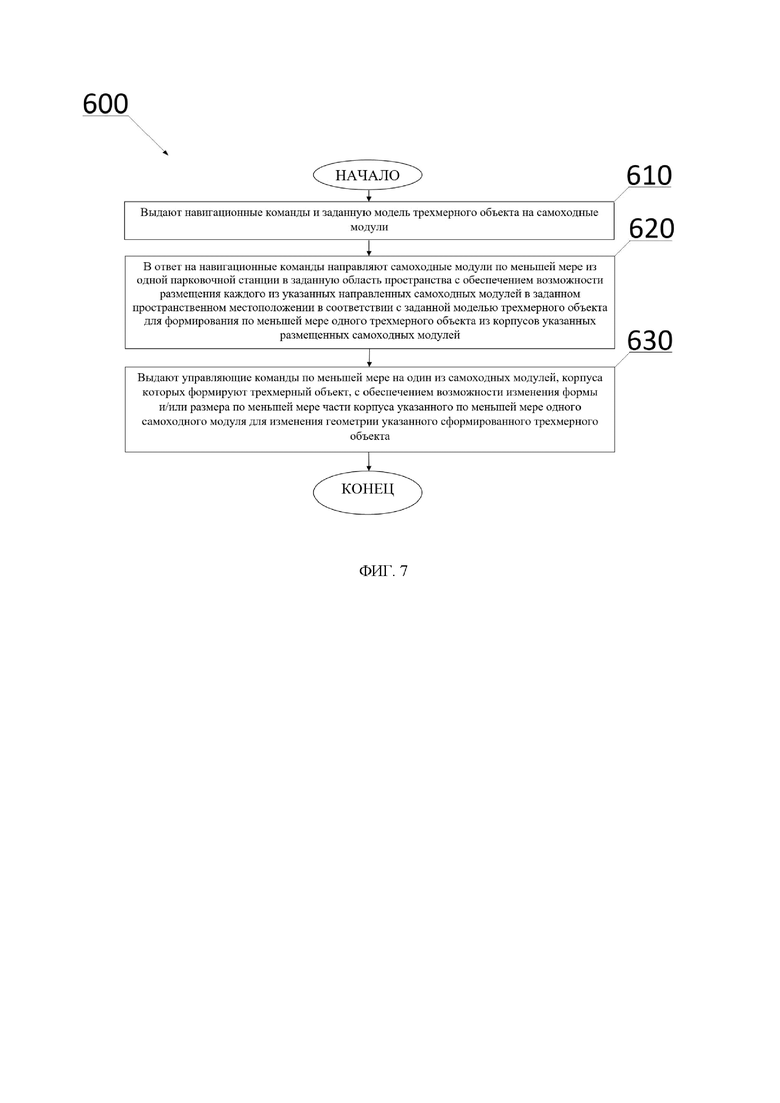
Группа изобретений относится к системе, способу и самоходному модулю для формирования трехмерного объекта. Система содержит самоходные модули и управляющее устройство. Для формирования трехмерного объекта выдают навигационные команды и заданную модель трехмерного объекта самоходным модулям для направления их в заданную область пространства и размещения их в заданном пространственном местоположении определенным образом для формирования трехмерного объекта, который составляется из их корпусов. Самоходный модуль содержит корпус, снабженный движителями, блок управления, выполненный с возможностью получения команд от управляющего устройства, перемещения самоходного модуля в заданное местоположение для участия в образовании составной части трехмерного объекта из его корпуса, выключения движителей при нахождении в составе трехмерного объекта. Обеспечивается упрощение и сокращение времени формирования трехмерного объекта, а также увеличение длительности поддержания сформированного трехмерного объекта в надлежащем состоянии в указанной области пространства. 3 н. и 109 з.п. ф-лы, 7 ил.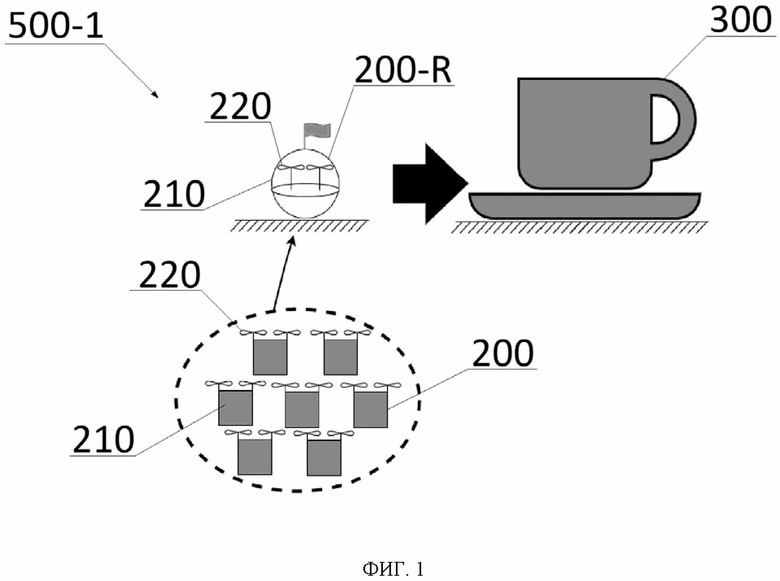
1. Система для формирования трехмерного объекта, содержащая:
самоходные модули, каждый из которых снабжен корпусом,
управляющее устройство, соединенное с самоходными модулями с возможностью направления по меньшей мере двух групп самоходных модулей из указанных самоходных модулей в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных самоходных модулей в заданном пространственном местоположении в соответствии с заданной моделью трехмерного объекта для формирования многослойного трехмерного объекта из корпусов указанных размещенных самоходных модулей, при этом
корпуса самоходных модулей, относящихся к одной из указанных групп самоходных модулей, формируют по меньшей мере один первый слой многослойного трехмерного объекта, а корпуса самоходных модулей, относящихся к другой группе из указанных групп самоходных модулей, формируют по меньшей мере один второй слой многослойного трехмерного объекта,
самоходные модули, корпуса которых формируют многослойный трехмерный объект, снабжены каждый одним или более приведенными в действие движителями, а
управляющее устройство дополнительно обеспечивает возможность выключения одного или более из указанных движителей самоходных модулей при нахождении самоходных модулей, движители которых выключают, в составе одного из указанных слоев многослойного трехмерного объекта.
2. Система по п. 1, в которой по меньшей мере два из указанных самоходных модулей дополнительно снабжены каждый одним или более гибкими или пружинными соединительными элементами, обеспечивающими возможность разъемного соединения между собой указанных по меньшей мере двух самоходных модулей при формировании трехмерного объекта и обеспечивающими возможность изменения пространственного местоположения и/или пространственной ориентации по меньшей мере одного из указанных по меньшей мере двух самоходных модулей по меньшей мере для частичного изменения геометрии трехмерного объекта.
3. Система по п. 1, в которой по меньшей мере два из указанных самоходных модулей дополнительно снабжены каждый одним или более подвижными соединениями, обеспечивающими возможность разъемного соединения между собой указанных по меньшей мере двух самоходных модулей при формировании трехмерного объекта и обеспечивающими возможность изменения пространственного местоположения и/или пространственной ориентации по меньшей мере одного из указанных по меньшей мере двух самоходных модулей по меньшей мере для частичного изменения геометрии трехмерного объекта.
4. Система по п. 3, в которой по меньшей мере один из указанных по меньшей мере двух самоходных модулей дополнительно содержит приводное устройство, находящееся под управлением управляющего устройства и функционально соединенное с подвижными соединениями указанного по меньшей мере одного самоходного модуля с обеспечением возможности изменения его пространственного местоположения и/или пространственной ориентации.
5. Система по п. 1, в которой по меньшей мере два из указанных самоходных модулей дополнительно снабжены каждый одним или более телескопическими или выдвижными соединениями, обеспечивающими возможность разъемного соединения между собой указанных по меньшей мере двух самоходных модулей при формировании трехмерного объекта и обеспечивающими возможность изменения пространственного местоположения и/или пространственной ориентации по меньшей мере одного из указанных по меньшей мере двух самоходных модулей при их раздвижении по меньшей мере для частичного изменения геометрии трехмерного объекта, а по меньшей мере один из указанных по меньшей мере двух самоходных модулей содержит приводное устройство, находящееся под управлением управляющего устройства и функционально соединенное с указанными соединениями с обеспечением возможности их раздвижения.
6. Система по п. 1, в которой корпус по меньшей мере одного из указанных самоходных модулей представляет собой складную сетку, выполненную с возможностью окружения указанного по меньшей мере одного самоходного модуля при ее развертывании, а указанный по меньшей мере один самоходный модуль дополнительно содержит приводное устройство, находящееся под управлением управляющего устройства и функционально соединенное с указанной сеткой с обеспечением возможности ее развертывания при формировании указанного трехмерного объекта в ответ на управляющие команды управляющего устройства.
7. Система по п. 1, в которой корпус по меньшей мере одного из указанных самоходных модулей выполнен гибким или эластичным, при этом указанный по меньшей мере один самоходный модуль дополнительно снабжен одним или более подвижными рабочими элементами, выполненными с возможностью взаимодействия по меньшей мере с одной из частей указанного корпуса при их перемещении с обеспечением возможности по меньшей мере частичного изменения формы и/или размера корпуса, и дополнительно содержит приводное устройство, находящееся под управлением управляющего устройства и функционально соединенное с указанными подвижными рабочими элементами с обеспечением возможности перемещения по меньшей мере одного из них в ответ на управляющие команды управляющего устройства.
8. Система по п. 1, в которой корпус по меньшей мере одного из указанных самоходных модулей выполнен гибким или эластичным, при этом указанный по меньшей мере один самоходный модуль дополнительно снабжен одним или более подвижными рабочими элементами, функционально соединенными по меньшей мере с одной из частей указанного корпуса с обеспечением возможности по меньшей мере частичного изменения формы указанного корпуса при их перемещении, и дополнительно содержит приводное устройство, находящееся под управлением управляющего устройства и функционально соединенное с указанными подвижными рабочими элементами с обеспечением возможности их перемещения в ответ на управляющие команды управляющего устройства.
9. Система по п. 1, в которой корпус по меньшей мере одного из указанных самоходных модулей выполнен из частей или пластин, соединенных между собой или выполненных с возможностью смещения по отношению друг к другу с обеспечением возможности по меньшей мере частичного изменения формы указанного корпуса, при этом указанный по меньшей мере один самоходный модуль дополнительно снабжен одним или более подвижными рабочими элементами, каждый из которых функционально соединен или выполнен с возможностью взаимодействия по меньшей мере с одной из указанных частей или пластин с обеспечением возможности их смещения по отношению друг к другу при перемещении указанного рабочего элемента, и дополнительно содержит приводное устройство, находящееся под управлением управляющего устройства и функционально соединенное с указанным рабочим элементом с обеспечением возможности его перемещения в ответ на управляющие команды управляющего устройства.
10. Система по п. 1, в которой корпус по меньшей мере одного из указанных самоходных модулей выполнен из подвижных частей или пластин, выполненных каждая с возможностью изменения пространственного положения и/или пространственной ориентации с обеспечением возможности по меньшей мере частичного изменения формы указанного корпуса, при этом указанный по меньшей мере один самоходный модуль дополнительно снабжен одним или более подвижными рабочими элементами, каждый из которых функционально соединен по меньшей мере с одной из указанных частей или пластин с обеспечением возможности изменения пространственного положения и/или пространственной ориентации указанной по меньшей мере одной части или пластины при перемещении указанного рабочего элемента, и дополнительно содержит приводное устройство, находящееся под управлением управляющего устройства и функционально соединенное с указанным рабочим элементом с обеспечением возможности его перемещения в ответ на управляющие команды управляющего устройства.
11. Система по п. 1, в которой по меньшей мере два из указанных самоходных модулей дополнительно снабжены каждый модулем определения местоположения, выполненным с возможностью определения пространственных координат указанного самоходного модуля в реальном времени, и выполнен с возможностью выдачи определенных пространственных координат на управляющее устройство, а управляющее устройство дополнительно выполнено с возможностью выдачи навигационных команд по меньшей мере на один из указанных по меньшей мере двух самоходных модулей для изменения курса перемещения указанного по меньшей мере одного самоходного модуля в случае установления на основании их пространственных координат, что расстояние между указанными по меньшей мере двумя самоходными модулями меньше порогового значения.
12. Система по п. 1, в которой по меньшей мере один из указанных направленных самоходных модулей дополнительно снабжен захватом, выполненным с возможностью перемещения и/или позиционирования по меньшей мере одного другого самоходного модуля из указанных направленных самоходных модулей при формировании трехмерного объекта из корпусов самоходных модулей.
13. Система по п. 1, которая дополнительно содержит один или более конструкционных модулей, а по меньшей мере один из указанных направленных самоходных модулей дополнительно снабжен захватом, выполненным с возможностью перемещения и/или позиционирования по меньшей мере одного из указанных конструкционных модулей для формирования по меньшей мере части трехмерного объекта из корпусов самоходных модулей и указанных конструкционных модулей.
14. Система по п. 13, в которой корпус по меньшей мере одного из указанных конструкционных модулей выполнен с возможностью изменения своей формы и/или своего размера, при этом управляющее устройство выполнено с возможностью выдачи управляющих команд на указанный по меньшей мере один конструкционный модуль с обеспечением возможности изменения формы и/или размера по меньшей мере части корпуса указанного по меньшей мере одного конструкционного модуля для по меньшей мере частичного изменения геометрии указанного сформированного трехмерного объекта.
15. Система по п. 1, в которой по меньшей мере один из указанных самоходных модулей представляет собой беспилотный летательный аппарат, при этом указанный по меньшей мере один самоходный модуль дополнительно снабжен измерительными датчиками для измерения параметров полета самоходного модуля, выполненными с возможностью измерения параметров полета указанного по меньшей мере одного самоходного модуля, и дополнительно выполнен с возможностью выдачи указанных измеренных параметров полета самоходного модуля на управляющее устройство, а управляющее устройство дополнительно выполнено с возможностью выдачи навигационных команд на самоходный модуль для изменения его курса перемещения и/или режима работы в случае, если по меньшей мере один из его параметров полета не соответствует пороговому значению или выходит за пределы диапазона пороговых значений.
16. Система по п. 1, в которой каждый из указанных по меньшей мере двух самоходных модулей снабжен по меньшей мере одним источником питания и дополнительно выполнен с возможностью выдачи в реальном времени данных о запасе хода на управляющее устройство с обеспечением возможности его замены по меньшей мере на один другой самоходный модуль в случае, если запас хода указанного заменяемого самоходного модуля ниже заданного порогового значения.
17. Система по любому из пп. 5-9, в которой по меньшей мере один из указанных по меньшей мере двух самоходных модулей дополнительно выполнен с возможностью выдачи в реальном времени данных о работе своего приводного устройства на управляющее устройство с обеспечением возможности его замены по меньшей мере на один другой самоходный модуль в случае выхода его приводного устройства из строя.
18. Система по п. 1, в которой по меньшей мере один из самоходных модулей дополнительно снабжен датчиками для измерения параметров состояния конструкции самоходного модуля, выполненными с возможностью измерения параметров состояния конструкции указанного по меньшей мере одного самоходного модуля, и дополнительно выполнен с возможностью выдачи в реальном времени измеренных параметров состояния конструкции самоходного модуля на управляющее устройство с обеспечением возможности его замены по меньшей мере на один другой самоходный модуль в случае, если по меньшей мере один из указанных параметров состояния конструкции указанного по меньшей мере одного самоходного модуля не соответствует пороговому значению или выходит за пределы диапазона пороговых значений.
19. Система по п. 16, в которой указанный по меньшей мере один источник питания содержит каждый по меньшей мере одно из группы, содержащей: аккумуляторную батарею, генератор на основе двигателя внутреннего сгорания, генератор на основе водородного двигателя и солнечную батарею.
20. Система по п. 16, которая дополнительно содержит по меньшей мере одну парковочную станцию для самоходных модулей, снабженную по меньшей мере одним зарядным устройством, а управляющее устройство дополнительно выполнено с возможностью направления по меньшей мере одного разряженного самоходного модуля на одну из указанных парковочных станций с обеспечением возможности его подключения к одному из указанных зарядных устройств для восполнения запаса хода разряженного самоходного модуля.
21. Система по п. 20, в которой каждое из указанных зарядных устройств представляет собой беспроводное зарядное устройство или проводное зарядное устройство.
22. Система по п. 20, в которой самоходные модули выполнены с возможностью последовательного или параллельного электрического соединения друг с другом при размещении на парковочной станции с обеспечением возможности их подключения к зарядному устройству для одновременного восполнения их запаса хода.
23. Система по п. 1, в которой по меньшей мере один из указанных самоходных модулей дополнительно снабжен устройством обнаружения, выполненным с возможностью определения расстояния до другого самоходного модуля из указанных самоходных модулей в зоне действия устройства обнаружения, и дополнительно выполнен с возможностью изменения своего пространственного местоположения и/или режима работы в случае, если расстояние до обнаруженного самоходного модуля меньше порогового значения, или дополнительно выполнено с возможностью выдачи данных об определенном значении расстояния до обнаруженного самоходного модуля на управляющее устройство с обеспечением возможности изменения пространственного местоположения, курса перемещения и/или режима работы указанного самоходного модуля или указанного обнаруженного самоходного модуля в случае, если расстояние до этого обнаруженного самоходного модуля меньше порогового значения.
24. Система по п. 1, в которой управляющее устройство дополнительно выполнено с возможностью выдачи навигационных команд по меньшей мере на часть из указанных самоходных модулей, корпуса которых формируют трехмерный объект, с обеспечением возможности перестроения этих самоходных модулей по меньшей мере для частичного изменения геометрии указанного трехмерного объекта.
25. Система по п. 1, в которой самоходные модули, корпуса которых формируют трехмерный объект, разделены по меньшей мере на две группы, при этом самоходные модули в одной из указанных групп имеют габаритные размеры, форму корпуса, рабочие параметры, тип самоходного модуля и/или тип источника питания самоходного модуля и/или вид самоходного модуля, отличные от самоходных модулей в другой группе из указанных групп.
26. Система по п. 1, в которой самоходные модули, корпуса которых формируют трехмерный объект, разделены по меньшей мере на две группы, при этом самоходные модули в одной из указанных групп имеют скорость перемещения, отличную от самоходных модулей в другой группе из указанных групп.
27. Система по п. 1, в которой по меньшей мере часть из самоходных модулей, корпуса которых формируют трехмерный объект, дополнительно выполнены каждый с возможностью сохранения или поддержания своего пространственного местоположения в течение заданного периода времени в соответствии с указанной моделью трехмерного объекта с обеспечением сохранения на месте сформированного трехмерного объекта.
28. Система по п. 1, в которой по меньшей мере часть из самоходных модулей, корпуса которых формируют трехмерный объект, дополнительно выполнены каждый с возможностью изменения своего пространственного местоположения в соответствии с указанной моделью трехмерного объекта с обеспечением возможности перемещения по меньшей мере части указанного трехмерного объекта в пространстве.
29. Система по п. 1, в которой управляющее устройство дополнительно выполнено с возможностью выдачи по меньшей мере на часть из самоходных модулей, корпуса которых формируют трехмерный объект, данных об изменении по меньшей мере части трехмерного объекта, а каждый из указанной части самоходных модулей дополнительно выполнен с возможностью изменения своего пространственного положения в реальном времени в соответствии с указанными данными об изменении части трехмерного объекта с обеспечением формирования по меньшей мере частично измененного трехмерного объекта.
30. Система по п. 1, в которой управляющее устройство дополнительно выполнено с возможностью выдачи по меньшей мере на часть или один из самоходных модулей, корпуса которых формируют трехмерный объект, данных об изменении модели трехмерного объекта, а указанные самоходные модули дополнительно выполнены каждый с возможностью изменения своего пространственного положения в реальном времени в соответствии с указанными данными об изменении модели трехмерного объекта с обеспечением возможности реализации движения указанного трехмерного объекта или по меньшей мере одной его части в пространстве.
31. Система по п. 1, в которой одна из указанных по меньшей мере двух групп самоходных модулей выполнена с возможностью формирования одной части указанного трехмерного объекта, а другая группа из указанных по меньшей мере двух групп самоходных модулей выполнена с возможностью формирования другой части указанного трехмерного объекта.
32. Система по п. 1, в которой одна из указанных по меньшей мере двух групп самоходных модулей выполнена с возможностью формирования неподвижной части указанного трехмерного объекта, а другая группа из указанных по меньшей мере двух групп самоходных модулей выполнена с возможностью формирования подвижной части указанного трехмерного объекта.
33. Система по п. 1, в которой самоходные модули, направленные в заданную область пространства, снабжены крепежными или соединительными средствами, обеспечивающими возможность взаимного разъемного взаимодействия указанных самоходных модулей друг с другом при формировании трехмерного объекта из корпусов соединяемых самоходных модулей.
34. Система по п. 33, в которой крепежные или соединительные средства самоходных модулей выполнены с возможностью их развертывания, раскладывания или раздвижения для обеспечения взаимного разъемного взаимодействия указанных самоходных модулей.
35. Система по п. 33, в которой крепежные или соединительные средства самоходных модулей выполнены с возможностью их выдвижения из корпусов самоходных модулей для обеспечения взаимного разъемного взаимодействия указанных самоходных модулей.
36. Система по п. 1, в которой по меньшей мере два из самоходных модулей, направленных в заданную область пространства, выполнены с возможностью механического соединения друг с другом с образованием составного самоходного модуля, выполненного с возможностью разъемного взаимодействия по меньшей мере с одним другим самоходным модулем из указанных направленных самоходных модулей при формировании указанного трехмерного объекта.
37. Система по п. 1, в которой самоходные модули, направленные в заданную область пространства, выполнены с возможностью механического соединения друг с другом с образованием составных самоходных модулей, а управляющее устройство обеспечивает возможность формирования трехмерного объекта из корпусов указанных составных самоходных модулей.
38. Система по п. 1, в которой каждый из самоходных модулей дополнительно снабжен по меньшей мере одним захватом и устройством фиксации изображений, выполненным с возможностью фиксации в реальном времени изображений в поле обзора с обеспечением возможности выявления по меньшей мере одного из направленных самоходных модулей в указанном поле обзора при нахождении в указанной области пространства, при этом каждый из указанных захватов соединен с возможностью обмена данными с устройством захвата изображений с обеспечением возможности захвата одного из выявленных самоходных модулей в ответ на данные о выявленных самоходных модулях от устройства фиксации изображений.
39. Система по п. 1, в которой управляющее устройство обеспечивает возможность изменения пространственного положения по меньшей мере одного из самоходных модулей, корпуса которых формируют трехмерный объект, с обеспечением возможности его смещения в пространстве по отношению к остальным самоходным модулям из указанных самоходных модулей по меньшей мере по одной из трех координатных осей таким образом, что трехмерный объект принимает правильную форму, вогнутую форму, выпуклую форму или криволинейную форму.
40. Система по п. 1, в которой самоходные модули, корпуса которых формируют трехмерный объект, образуют заданное количество последовательно расположенных горизонтальных или вертикальных рядов, по меньшей мере в одном из которых самоходные модули выполнены с возможностью сохранения своего пространственного местоположения и по меньшей мере в другом из которых самоходные модули выполнены с возможностью изменения своего пространственного местоположения с обеспечением перемещения или реализации движения в пространстве части трехмерного объекта, соответствующей указанному ряду самоходных модулей.
41. Система по п. 1, которая дополнительно содержит по меньшей мере одну парковочную станцию для самоходных модулей, снабженную по меньшей мере одним зарядным устройством, при этом управляющее устройство обеспечивает возможность замены по меньшей мере одного из разряженных самоходных модулей по меньшей мере на один заряженный самоходный модуль из упомянутой парковочной станции по меньшей мере в одном из мест сформированного трехмерного объекта.
42. Система по п. 41, в которой управляющее устройство дополнительно обеспечивает возможность направления указанного разряженного самоходного модуля на парковочную станцию из указанных парковочных станций для восполнения его запаса хода и возможность возврата указанного самоходного модуля с восполненным запасом хода с обеспечением замены одного из разряженных самоходных модулей в сформированном трехмерном объекте.
43. Система по п. 42, в которой управляющее устройство обеспечивает возможность замены разряженного самоходного модуля на указанный заряженный самоходный модуль при нахождении разряженного самоходного модуля в пространственном местоположении, соответствующем одному из указанных мест замены.
44. Система по п. 20, в которой управляющее устройство обеспечивает возможность направления заряженных самоходных модулей в заданную область пространства в количестве, соответствующем количеству самоходных модулей, корпуса которых формируют трехмерный объект, с обеспечением возможности их по существу одновременной замены на указанные заряженные самоходные модули.
45. Система по п. 44, в которой управляющее устройство дополнительно обеспечивает возможность формирования в указанной области пространства подменного трехмерного объекта из указанных заряженных самоходных модулей, являющегося копией заменяемого трехмерного объекта, с обеспечением возможности замены заменяемого трехмерного объекта на подменный трехмерный объект.
46. Система по п. 45, в которой управляющее устройство дополнительно обеспечивает возможность замены заменяемого трехмерного объекта на подменный трехмерный объект по истечению заданного периода времени.
47. Система по п. 1, в которой самоходные модули одной из по меньшей мере двух групп самоходных модулей формируют одну из частей трехмерного объекта, при этом управляющее устройство дополнительно обеспечивает возможность формирования в указанной области пространства по меньшей мере одной подменной части трехмерного объекта из заряженных самоходных модулей, направленных в указанную область пространства, с обеспечением возможности замены заменяемой части трехмерного объекта на указанную подменную часть трехмерного объекта.
48. Система по п. 47, в которой при замене заменяемой части трехмерного объекта на подменную часть трехмерного объекта управляющее устройство по существу одновременно выдает управляющие команды на самоходные модули, корпуса которых формируют заменяемую часть трехмерного объекта.
49. Система по п. 1, в которой корпуса самоходных модулей из одной группы формируют по меньшей мере один первый слой указанного трехмерного объекта, корпуса самоходных модулей из другой группы формируют по меньшей мере один второй слой указанного трехмерного объекта, имеющие разные формы и/или размеры.
50. Система по п. 1, которая дополнительно содержит по меньшей мере одну парковочную станцию для самоходных модулей, по меньшей мере один из самоходных модулей, корпуса которых формируют трехмерный объект, снабжен по меньшей мере одним источником питания и дополнительно выполнен с возможностью выдачи в реальном времени данных о своем запасе хода на управляющее устройство, а управляющее устройство дополнительно выполнено с возможностью выявления разряженного самоходного модуля на основании указанных данных о запасе хода с обеспечением возможности направления разряженного самоходного модуля на одну из указанных парковочных станций и с обеспечением возможности перестроения оставшихся самоходных модулей из самоходных модулей, корпуса которых формируют трехмерный объект, для изменения или сохранения формы и/или размера указанного трехмерного объекта.
51. Система по п. 1, в которой управляющее устройство дополнительно выполнено с возможностью направления в указанную область пространства одного или более дополнительных самоходных модулей с обеспечением возможности их встраивания в структуру трехмерного объекта для изменения формы и/или размера трехмерного объекта.
52. Система по п. 1, в которой самоходные модули одной из по меньшей мере двух групп самоходных модулей формируют одну из частей трехмерного объекта, при формировании трехмерного объекта управляющее устройство обеспечивает возможность построения указанных самоходных модулей таким образом, что по меньшей мере одна из указанных частей трехмерного объекта имеет форму и/или размеры, отличные от остальных частей трехмерного объекта.
53. Система по п. 1, в которой по меньшей мере один из самоходных модулей, корпуса которых формируют трехмерный объект, снабжен по меньшей мере одним источником питания, а указанная система дополнительно содержит лазерную установку, выполненную с возможностью излучения лазерного луча, при этом указанный по меньшей мере один самоходный модуль дополнительно снабжен приемником-преобразователем лазерного излучения, электрически соединенным с указанным источником питания и выполненным с возможностью преобразования принятого лазерного луча в электрический ток с обеспечением возможности зарядки указанного источника питания.
54. Система по п. 53, в которой по меньшей мере один из самоходных модулей, корпуса которых формируют трехмерный объект, дополнительно выполнен с возможностью выдачи в реальном времени данных о своем запасе хода на управляющее устройство, а управляющее устройство дополнительно выполнено с возможностью управления работой лазерной установки с обеспечением возможности направления лазерного луча на указанный по меньшей мере один самоходный модуль в случае, если его запас хода ниже заданного порогового значения.
55. Система по п. 1, дополнительно содержащая подвижную или стационарную несущую конструкцию, выполненную с возможностью размещения на ней одного или более из самоходных модулей, направленных управляющим устройством в указанную область пространства, с обеспечением формирования указанного трехмерного объекта из корпусов указанных размещенных самоходных модулей в соответствии с моделью трехмерного объекта или из корпусов указанных размещенных самоходных модулей и указанной несущей конструкции в соответствии с моделью трехмерного объекта.
56. Система по п. 55, в которой указанная несущая конструкция снабжена одной или более парковочными площадками, выполненными с возможностью размещения на каждой из них по меньшей мере одного из указанных направленных самоходных модулей.
57. Система по п. 55, в которой указанная несущая конструкция снабжена по меньшей мере одним крепежным средством, выполненным с возможностью взаимодействия по меньшей мере с одним из указанных направленных самоходных модулей.
58. Система по п. 55, в которой по меньшей мере один из указанных направленных самоходных модулей снабжен одним или более крепежными средствами, выполненными каждое с возможностью взаимодействия с указанной несущей конструкцией.
59. Система по п. 1, которая дополнительно содержит по меньшей мере одну парковочную станцию для самоходных модулей, одна или более из указанных парковочных станций дополнительно снабжена одним или более зарядными устройствами, а управляющее устройство дополнительно выполнено с возможностью направления одного или более из самоходных модулей, корпуса которых формируют трехмерный объект, по меньшей мере на одну из указанных парковочных станций с обеспечением возможности подключения каждого из указанных направленных самоходных модулей по меньшей мере к одному из указанных зарядных устройств для восполнения его запаса хода.
60. Система по п. 59, в которой управляющее устройство выполнено с возможностью выдачи навигационных команд на самоходные модули, корпуса которых формируют трехмерный объект, для их направления на указанную по меньшей мере одну парковочную станцию по истечении заданного периода времени.
61. Система по п. 59, в которой управляющее устройство выполнено с возможностью выдачи навигационных команд по меньшей мере на часть из самоходных модулей, корпуса которых формируют трехмерный объект, для их направления на указанную по меньшей мере одну парковочную станцию одновременно или последовательно.
62. Система по п. 59, в которой управляющее устройство выполнено с возможностью выдачи навигационных команд по меньшей мере на часть из самоходных модулей, корпуса которых формируют трехмерный объект, для их направления на указанную по меньшей мере одну парковочную станцию группами или друг за другом.
63. Система по п. 59, в которой управляющее устройство дополнительно выполнено с возможностью выдачи навигационных команд на один или более из заряженных самоходных модулей с обеспечением возможности их возврата в свои первоначальные пространственные местоположения для повторного формирования указанного трехмерного объекта.
64. Система по п. 1, которая дополнительно содержит по меньшей мере одну парковочную станцию для самоходных модулей, одна или более из указанных парковочных станций дополнительно снабжена одним или более зарядными устройствами, а один или более из самоходных модулей, корпуса которых формируют трехмерный объект, выполнены с возможностью перемещения на по меньшей мере одну из указанных парковочных станций с зарядными устройствами с обеспечением возможности подключения каждого из указанных направленных самоходных модулей к одному из указанных зарядных устройств для восполнения его запаса хода.
65. Система по п. 64, в которой один или более из самоходных модулей, корпуса которых формируют трехмерный объект, выполнены с возможностью автоматического перемещения на указанную по меньшей мере одну парковочную станцию по истечении заданного периода времени.
66. Система по п. 64, в которой один или более из самоходных модулей, корпуса которых формируют трехмерный объект, выполнены с возможностью автоматического перемещения на указанную по меньшей мере одну парковочную станцию по существу одновременно или последовательно.
67. Система по п. 64, в которой по меньшей мере часть из самоходных модулей, корпуса которых формируют трехмерный объект, выполнены с возможностью автоматического перемещения на указанную по меньшей мере одну парковочную станцию группами или друг за другом.
68. Система по п. 64, в которой один или более из заряженных самоходных модулей выполнены с возможностью автоматического возврата в свои первоначальные пространственные местоположения для повторного формирования указанного трехмерного объекта.
69. Система по п. 1, в которой управляющее устройство дополнительно выполнено с возможностью выдачи навигационных команд по меньшей мере на часть из самоходных модулей, корпуса которых формируют трехмерный объект, с обеспечением возможности перестроения этих самоходных модулей для разделения указанного трехмерного объекта по меньшей мере на два отдельных трехмерных элемента.
70. Система по п. 69, в которой управляющее устройство дополнительно выполнено с возможностью выдачи навигационных команд на самоходные модули, корпуса которых формируют указанные по меньшей мере два трехмерных элемента, с обеспечением возможности перестроения этих самоходных модулей для объединения указанных трехмерных элементов по меньшей мере в один единый трехмерный объект.
71. Система по п. 1, в которой корпус по меньшей мере одного из указанных самоходных модулей дополнительно снабжен одним или более дисплеями, а управляющее устройство дополнительно выполнено с возможностью выдачи данных об изображении на указанный по меньшей мере один самоходный модуль с обеспечением возможности отображения указанного изображения по меньшей мере на одном из его дисплеев.
72. Система по п. 71, в которой отображаемое изображение представляет собой статическое изображение или динамическое изображение.
73. Система по п. 1, в которой корпус по меньшей мере одного из указанных самоходных модулей дополнительно снабжен одним или более экранами, указанная система дополнительно содержит проекционное устройство, а управляющее устройство дополнительно выполнено с возможностью выдачи данных об изображении на указанное проекционное устройство с обеспечением возможности проецирования указанного изображения по меньшей мере на одном из указанных экранов.
74. Система по п. 1, в которой корпус по меньшей мере одного из указанных самоходных модулей дополнительно снабжен одним или более экранами и проекционным устройством, а управляющее устройство дополнительно выполнено с возможностью выдачи данных об изображении на указанное проекционное устройство с обеспечением возможности проецирования указанного изображения по меньшей мере на одном из указанных экранов.
75. Система по п. 1, дополнительно содержащая проекционное устройство, при этом управляющее устройство дополнительно выполнено с возможностью выдачи данных об изображении на указанное проекционное устройство с обеспечением возможности проецирования указанного изображения по меньшей мере на одном из корпусов самоходных модулей, которые формируют трехмерный объект.
76. Система по п. 1, в которой корпус по меньшей мере одного из указанных самоходных модулей снабжен проекционным устройством, а управляющее устройство дополнительно выполнено с возможностью выдачи данных об изображении на указанное проекционное устройство с обеспечением возможности проецирования указанного изображения на указанном корпусе.
77. Система по п. 1, в которой один или более из указанных самоходных модулей, корпуса которых формируют трехмерный объект, снабжены каждый по меньшей мере одним дополнительным движителем с образованием по меньшей мере двух или более движителей.
78. Система по п. 77, в которой управляющее устройство дополнительно обеспечивает возможность выключения по меньшей мере одного из указанных движителей при нахождении каждого из указанных самоходных модулей с движителями в составе сформированного трехмерного объекта.
79. Система по п. 77, в которой по меньшей мере один из указанных самоходных модулей, корпуса которых формируют трехмерный объект, дополнительно выполнен с возможностью выключения или сохранения в рабочем состоянии указанного движителя при нахождении в составе сформированного трехмерного объекта.
80. Система по п. 1, в которой один или более из самоходных модулей, корпуса которых формируют трехмерный объект, снабжен модулем определения местоположения, выполненным с возможностью определения географических координат указанного по меньшей мере одного самоходного модуля в реальном времени и с возможностью выдачи определенных координат на управляющее устройство, а управляющее устройство дополнительно выполнено с возможностью выявления отклонения пространственного местоположения или пространственного смещения по меньшей мере части сформированного трехмерного объекта на основании данных о географических координатах самоходных модулей и модели трехмерного объекта и выполнено с возможностью перемещения самоходных модулей, соответствующих указанной отклоненной или смещенной части трехмерного объекта, для их возврата в их первоначальные пространственные местоположения в соответствии с указанной моделью трехмерного объекта.
81. Система по п. 1, в которой корпус по меньшей мере одного из самоходных модулей, которые формируют трехмерный объект, снабжен по меньшей мере одним датчиком силы, выполненным с возможностью измерения в реальном времени усилия, прикладываемого пользователем к указанному корпусу, и с возможностью выдачи измеренного усилия на управляющее устройство, а управляющее устройство дополнительно выполнено с возможностью смещения указанного по меньшей мере одного самоходного модуля в зависимости от указанного измеренного усилия для изменения формы, пространственного местоположения и/или пространственной ориентации трехмерного объекта.
82. Система по п. 1, в которой по меньшей мере два из корпусов самоходных модулей, которые формируют трехмерный объект, выполнены каждый с возможностью их смещения пользователем по отношению друг к другу.
83. Система по п. 1, в которой обеспечена возможность добавления по меньшей мере одного дополнительного самоходного модуля к самоходным модулям, корпуса которых формируют трехмерный объект, или возможность удаления по меньшей мере одного самоходного модуля из самоходных модулей, корпуса которых формируют трехмерный объект, по меньшей мере для частичного изменения указанного трехмерного объекта.
84. Система по п. 81, в которой по меньшей мере один из самоходных модулей, корпуса которых формируют трехмерный объект, снабжен модулем определения местоположения, выполненным с возможностью определения пространственных координат указанного по меньшей мере одного самоходного модуля в реальном времени и с возможностью выдачи определенных пространственных координат на управляющее устройство, а управляющее устройство дополнительно выполнено с возможностью изменения модели трехмерного объекта на основании указанных определенных пространственных координат самоходного модуля при их отклонении от первоначальных пространственных координат, соответствующих первоначальной модели трехмерного объекта.
85. Система по п. 81, дополнительно содержащая сканирующее устройство, выполненное с возможностью сканирования измененного трехмерного объекта и с возможностью выдачи скана трехмерного объекта на управляющее устройство, а управляющее устройство дополнительно выполнено с возможностью формирования или обновления модели трехмерного объекта на основании указанного скана.
86. Система по п. 1, в которой дополнительно обеспечена возможность прикрепления одного или более конструкционных модулей по меньшей мере к одному из указанных самоходных модулей, корпуса которых формируют трехмерный объект, по меньшей мере для частичного изменения геометрии трехмерного объекта.
87. Система по п. 86, в которой по меньшей мере один из указанных самоходных модулей дополнительно снабжен по меньшей мере одним крепежным или соединительным элементом, обеспечивающим возможность прикрепления указанных конструкционных модулей к указанному по меньшей мере одному самоходному модулю.
88. Система по п. 86, в которой по меньшей мере один из указанных самоходных модулей дополнительно снабжен по меньшей мере одним захватом, выполненным с возможностью захвата указанного по меньшей мере одного конструкционного модуля и дополнительно выполненным с возможностью перемещения и/или позиционирования указанного захваченного конструкционного модуля по меньшей мере для частичного изменения геометрии трехмерного объекта.
89. Система по п. 1, в которой корпус по меньшей мере одного из указанных самоходных модулей выполнен с возможностью изменения своей формы и/или своего размера, а управляющее устройство выполнено с возможностью выдачи управляющих команд по меньшей мере на один из самоходных модулей, корпуса которых формируют указанный трехмерный объект, с обеспечением возможности изменения формы и/или размера по меньшей мере части корпуса указанного по меньшей мере одного самоходного модуля для по меньшей мере частичного изменения геометрии указанного сформированного трехмерного объекта.
90. Система по п. 1, в которой самоходные модули выполнены с возможностью размещения в полости, содержащей проем, ограниченный краями полости и выполненный с возможностью прохождения корпуса самоходного модуля в полость и заполнения полости корпусами самоходных модулей; при этом в ответ на заполнение полости самоходными модулями до краев полости в области проема образуют по меньшей мере одну поверхность заполненной полости, являющуюся по меньшей мере одной поверхностью сформированного трехмерного объекта.
91. Система по п. 89, в которой в ответ на изменение формы или размера полости и соответствующее изменение по меньшей мере одной поверхности трехмерного объекта, управляющее устройство системы выполнено с возможностью восстановления по меньшей мере одной поверхности трехмерного объекта посредством добавления по меньшей мере одного дополнительного самоходного модуля ко множеству самоходных модулей, корпуса которых заполняют полость, или посредством удаления по меньшей мере одного самоходного модуля из самоходных модулей, корпуса которых заполняют полость.
92. Система по п. 90, которая дополнительно содержит сканирующее устройство, выполненное с возможностью сканирования по меньшей мере одной поверхности трехмерного объекта и с возможностью выдачи скана по меньшей мере одной поверхности трехмерного объекта на управляющее устройство, а управляющее устройство дополнительно выполнено с возможностью восстановления по меньшей мере одной поверхности трехмерного объекта на основании указанного скана.
93. Система по п. 90, в которой по меньшей мере один из указанных самоходных модулей выполнен с возможностью его размещения в полости и снабжен сканирующим устройством, выполненным с возможностью сканирования по меньшей мере одной поверхности трехмерного объекта и/или сканирования указанной полости и/или определения положения краев полости с получением скана по меньшей мере одной поверхности трехмерного объекта или трехмерного объекта или краев полости соответственно.
94. Система по п. 93, в которой самоходный модуль дополнительно содержит блок управления с образованием опорного самоходного модуля, соединенный с возможностью обмена данными со сканирующим устройством и самоходными модулями и выполненный с возможностью направления по меньшей мере части из указанных самоходных модулей к указанному опорному самоходному модулю в количестве, соответствующем трехмерной модели полости или по меньшей мере одной поверхности трехмерного объекта, с обеспечением заполнения указанными направленными самоходными модулями указанной полости и с образованием заданного трехмерного объекта или по меньшей мере одной заданной поверхности трехмерного объекта.
95. Способ формирования трехмерного объекта, включающий следующий этап, согласно которому:
выдают навигационные команды и заданную модель трехмерного объекта на самоходные модули, каждый из которых имеет корпус,
причем
в ответ на указанные навигационные команды направляют по меньшей мере две группы самоходных модулей из указанных самоходных модулей в заданную область пространства с обеспечением возможности размещения каждого из указанных направленных самоходных модулей в заданном пространственном местоположении в соответствии с заданной моделью трехмерного объекта для формирования по меньшей мере одного многослойного трехмерного объекта из корпусов указанных размещенных самоходных модулей, при этом корпуса самоходных модулей, относящихся к одной из указанных групп, формируют по меньшей мере один первый слой указанного многослойного трехмерного объекта, корпуса самоходных модулей, относящихся к другой группе из указанных самоходных модулей, формируют по меньшей мере один второй слой указанного многослойного трехмерного объекта,
самоходные модули, корпуса которых формируют многослойный трехмерный объект, снабжены каждый одним или более приведенными в действие движителями, выключают посредством управляющего устройства по меньшей мере один из указанных движителей при нахождении самоходных модулей, движители которых выключают в составе многослойного трехмерного объекта.
96. Способ по п. 95, согласно которому дополнительно выдают управляющие команды по меньшей мере на один из самоходных модулей, корпуса которых формируют указанный трехмерный объект, с обеспечением возможности изменения формы и/или размера по меньшей мере части корпуса указанного по меньшей мере одного самоходного модуля для изменения геометрии указанного сформированного трехмерного объекта.
97. Способ по п. 95, согласно которому дополнительно вручную смещают по меньшей мере один из самоходных модулей, корпуса которых формируют трехмерный объект.
98. Способ по п. 95, согласно которому дополнительно вручную добавляют по меньшей мере один дополнительный самоходный модуль к самоходным модулям, корпуса которых формируют трехмерный объект, или дополнительно вручную удаляют по меньшей мере один самоходный модуль из самоходных модулей, корпуса которых формируют трехмерный объект, для изменения указанного трехмерного объекта.
99. Способ по п. 95, согласно которому дополнительно измеряют в реальном времени усилие, приложенное к корпусу по меньшей мере одного из самоходных модулей, корпуса которых формируют трехмерный объект, с использованием датчика силы, которым снабжен указанный корпус, и смещают указанный самоходный модуль в зависимости от указанного измеренного усилия для изменения формы и/или пространственного местоположения трехмерного объекта.
100. Способ по п. 95, согласно которому дополнительно определяют в реальном времени пространственные координаты самоходных модулей, корпуса которых формируют трехмерный объект, с использованием модулей определения местоположения, которыми снабжены указанные самоходные модули, и изменяют модель трехмерного объекта на основании указанных определенных пространственных координат самоходных модулей при отклонении по меньшей мере одной из них от первоначальной модели трехмерного объекта.
101. Способ по п. 95, согласно которому дополнительно сканируют, посредством сканирующего устройства, измененный трехмерный объект и формируют или обновляют модель трехмерного объекта на основании полученного скана измененного трехмерного объекта.
102. Самоходный модуль для формирования трехмерного объекта, содержащий:
корпус, снабженный одним или более движителями, обеспечивающим возможность перемещения самоходного модуля,
при этом указанный самоходный модуль содержит
блок управления, выполненный с возможностью приема навигационных команд от внешнего управляющего устройства с обеспечением возможности перемещения указанного самоходного модуля в заданную область пространства с использованием по меньшей мере одного из указанных движителей и с возможностью обеспечения размещения указанного самоходного модуля в заданном пространственном местоположении для формирования по меньшей мере части заданного трехмерного объекта, блок управления выполнен с возможностью получения команд от управляющего устройства для выключения по меньшей мере одного из указанных движителей при нахождении самоходного модуля с движителями в составе сформированного трехмерного объекта.
103. Самоходный модуль по п. 102, в котором корпус снабжен по меньшей мере одним управляемым рабочим элементом, функционально соединенным с указанным корпусом и выполненным с возможностью изменения формы и/или размера по меньшей мере части указанного корпуса при приведении в действие указанного рабочего элемента, а блок управления функционально соединен с указанным рабочим элементов с обеспечением возможности выдачи на него управляющих команд для приведения его в действие.
104. Самоходный модуль по п. 102, в котором корпус снабжен двумя или более движителями.
105. Самоходный модуль по п. 104, в котором каждый из указанных движителей выполнен в виде одного из группы движителей, содержащей: парус, гребной винт, крыльчатый движитель, лопастный винт, водометный движитель, гребное колесо, весельный движитель, ластовый движитель, движитель по типу рыбьего хвоста, колесное шасси, пневмокатковый движитель, роторно-фрезерный движитель, гусеничный движитель, полугусеничный движитель, лыжно-гусеничный движитель, шнекороторный движитель, шагающий движитель, электромагнитный движитель, реактивный движитель, движитель на основе машущего крыла, движитель на основе шагающего колеса, движитель на основе квадратного колеса, вибрационный движитель, движитель амебного типа, движитель на основе секционного колеса и инерционный движитель.
106. Самоходный модуль по п. 102, в корпусе которого дополнительно установлен независимый подвижный элемент, выполненный с возможностью перемещения внутри корпуса под управлением блока управления с обеспечением возможности перемещения указанного самоходного модуля.
107. Самоходный модуль по п. 102, в котором корпус дополнительно снабжен приводным устройством, функционально соединенным с указанным корпусом или выполненным с возможностью воздействия на указанный корпус с обеспечением возможности приведения указанного корпуса в движение для перемещения указанного самоходного модуля в пространстве.
108. Самоходный модуль по п. 102, в котором корпус образован из отдельных функциональных частей и содержит приводное устройство, функционально соединенное с указанными функциональными частями с обеспечением возможности изменения пространственных местоположений указанных функциональных частей по отношению друг к другу для изменения формы и/или размеров указанного корпуса.
109. Самоходный модуль по п. 102, в котором корпус образован из отдельных функциональных частей и содержит приводное устройство, функционально соединенное с указанными функциональными частями с обеспечением возможности раздвижения или развертывания указанных функциональных частей для изменения формы, размеров и/или контура указанного корпуса.
110. Самоходный модуль по п. 102, в котором корпус образован из отдельных управляемых функциональных частей, при этом блок управления соединен с возможностью обмена данными с указанными управляемыми функциональными частями с обеспечением возможности изменения пространственных местоположений указанных функциональных частей по отношению друг к другу в ответ на управляющие команды блока управления для изменения формы, размеров и/или контура указанного корпуса.
111. Самоходный модуль по п. 102, в котором корпус образован из отдельных управляемых функциональных частей, при этом блок управления соединен с возможностью обмена данными с указанными управляемыми функциональными частями с обеспечением возможности раздвижения или развертывания указанных функциональных частей в ответ на управляющие команды блока управления для изменения формы, размеров и/или контура указанного корпуса.
112. Самоходный модуль по п. 102, в котором корпус выполнен с возможностью изменения своих формы и/или размера, а блок управления дополнительно функционально соединен с корпусом и выполнен с возможностью приема управляющих команд от управляющего устройства с обеспечением возможности изменения формы и/или размера по меньшей мере части указанного корпуса.
| US 20220144431 A1, 12.05.2022 | |||
| Способ децентрализованного управления распределенной обобщенной сетью, включающей подвижные роботизированные средства и стыковочные станции | 2020 |
|
RU2781391C2 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Комбинированная силовая установка самолета вертикального взлёта и посадки | 2020 |
|
RU2758744C1 |
| БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2020 |
|
RU2741854C1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| CN 107332301 B, 24.12.2019 | |||
| БПЛА И СПОСОБ ВЫПОЛНЕНИЯ АЭРОФОТОСЪЕМКИ | 2022 |
|
RU2798604C1 |
| Комбинированный способ управления летательным аппаратом (ЛА) | 2017 |
|
RU2771513C2 |

