Область техники
Настоящее изобретение относится к системам для формирования трехмерных объектов и к техническим средствам, способным двигаться на собственной тяге, а именно к самоходному модулю и самоходной системе, содержащей взаимодействующие между собой самоходные модули.
Уровень техники
В настоящее время разработано множество различных автоматизированных или полуавтоматизированных самоходных модулей, способных совершать перемещение по поверхности перемещения. Однако несмотря на то, что современные автоматизированные или полуавтоматизированные самоходные модули могут относительно быстро совершать перемещение по поверхности перемещения, они имеют существенный недостаток, заключающийся в невозможности их перемещения друг по другу, то есть самоходным модулям того же типа.
Следовательно, ввиду по меньшей мере сформулированного выше недостатка современных самоходных модулей, способных совершать перемещение по поверхности перемещения, разработка усовершенствованных самоходных модулей является актуальной задачей.
В частности, в патенте США №7327112 (US 7327112), опубл. 05 февраля 2008 года, описан самоходный модуль, содержащий корпус, снабженный ножками, и управляющее устройство, соединенное по меньшей мере с одной из указанных ножек с обеспечением возможности управляемого изменения ее длины для перемещения указанного корпуса по поверхности перемещения.
Следует отметить, что в самоходном модуле, раскрытом в US 7327112, также не решен сформулированный выше недостаток, заключающийся в невозможности его перемещения по другим самоходных модулям такого же типа. В частности, попытка размещения корпуса одного самоходного модуля в конструктивном исполнении, раскрытом в US 7327112, на корпусе другого самоходного модуля в конструктивном исполнении, раскрытом в US 7327112, или попытка перемещения корпуса одного самоходного модуля в конструктивном исполнении, раскрытом в US 7327112, по корпусу другого самоходного модуля в конструктивном исполнении, раскрытом в US 7327112, может привести к поломке их ножек или к возникновению аварийной ситуации, в которую может попасть по меньшей мере один из этих самоходных модулей.
Таким образом, очевидна потребность в дальнейшем совершенствовании известных самоходных модулей, в частности для обеспечения возможности их размещения друг на друге или возможности перемещения друг по другу.
Следовательно, основная техническая проблема, решаемая настоящим изобретением, состоит в создании самоходного модуля, в котором по меньшей мере частично устранен по меньшей мере обозначенный выше недостаток известного самоходного модуля, заключающийся в невозможности его размещения на корпусе другого самоходного модуля того же типа или невозможности его перемещения по корпусу другого самоходного модуля того же типа.
Также общей задачей заявляемого изобретения может являться расширение арсенала самоходных модулей, способных совершать перемещение по поверхности перемещения, в качестве которой может выступать поверхность корпуса другого самоходного модуля того же типа.
Раскрытие
Задача настоящего изобретения состоит в создании самоходного модуля и самоходной системы, решающих каждое по меньшей мере обозначенную выше основную техническую проблему известного уровня техники.
Еще одна задача настоящего изобретения состоит в создании альтернативного самоходного модуля по отношению к известному в уровне техники самоходному модулю.
Каждая из поставленных задач решена в первом аспекте настоящего изобретения благодаря тому, что в предложенном самоходном модуле, содержащем (i) корпус, снабженный ножками; и (ii) управляющее устройство, соединенное по меньшей мере с одной из указанных ножек с обеспечением возможности управляемого изменения ее пространственной ориентации по отношению к указанному корпусу, длины или формы для перемещения указанного корпуса по поверхности перемещения, по меньшей мере одна из указанных ножек выполнена с возможностью взаимодействия с другим самоходным модулем с обеспечением возможности размещения указанного корпуса на указанном другом самоходном модуле или возможности перемещения указанного корпуса по указанному другому самоходному модулю.
Кроме того, каждая из поставленных задач решена и во втором аспекте настоящего изобретения благодаря тому, что предложенная самоходная система содержит: два или более самоходных модулей согласно первому аспекту настоящего изобретения, введенных во взаимодействие друг с другом с использованием одной или более ножек в каждом из указанных взаимодействующих самоходных модулей.
Вышеописанные первый и второй аспекты настоящего изобретения обеспечивают каждый технический результат, заключающийся в улучшении проходимости (т.е. возможности преодолевать различные препятствия, в том числе и иные самоходные модули), маневренности, скорости перемещения и/или т.п.
Кроме того, вышеописанные первый и второй аспекты настоящего изобретения обеспечивают каждый дополнительный технический результат, заключающийся в улучшении стабилизации корпуса самоходного модуля на корпусе другого самоходного модуля того же типа, в том числе при перемещении указанного другого самоходного модуля по поверхности перемещения.
Кроме того, вышеописанные первый и второй аспекты настоящего изобретения обеспечивают каждый еще один дополнительный технический результат, заключающийся в расширении арсенала самоходных модулей, способных совершать перемещение по поверхности перемещения, в качестве которой может выступать корпус другого самоходного модуля того же типа.
Еще одним техническим результатом, объективно достигаемым при осуществлении заявляемого технического решения, является возможность управляемого формирования трехмерных объектов и поверхностей из множества самоходных модулей.
Краткое описание чертежей
Прилагаемые чертежи, которые приведены для обеспечения лучшего понимания сущности настоящего изобретения, составляют часть настоящего документа и включены в него для иллюстрации нижеописанных вариантов реализации и аспектов настоящего изобретения. Прилагаемые чертежи в сочетании с приведенным ниже описанием служат для пояснения сущности настоящего изобретения. На чертежах:
на фиг. 1 показан один из иллюстративных вариантов реализации самоходного модуля согласно настоящему изобретению в составе самоходной системы и показан один из примеров процесса взаимодействия таких самоходных модулей друг с другом;
на фиг. 2 показано состояние самоходных модулей, вышедших из взаимодействия друг с другом при завершении процесса взаимодействия, показанного на фиг. 1;
на фиг. 3 показан еще один иллюстративный вариант реализации самоходного модуля согласно настоящему изобретению и показан еще один пример процесса взаимодействия таких самоходных модулей друг с другом;
на фиг. 4 показан еще один иллюстративный вариант реализации самоходного модуля согласно настоящему изобретению и показан еще один пример процесса взаимодействия таких самоходных модулей друг с другом;
на фиг. 5 показан еще один иллюстративный вариант реализации самоходного модуля согласно настоящему изобретению и показан еще один пример процесса взаимодействия таких самоходных модулей друг с другом;
на фиг. 6 показан еще один иллюстративный вариант реализации самоходного модуля согласно настоящему изобретению и показан еще один пример процесса взаимодействия таких самоходных модулей друг с другом;
на фиг. 7-12 показан еще один иллюстративный вариант реализации самоходного модуля согласно настоящему изобретению и показаны разновидности процесса взаимодействия таких самоходных модулей друг с другом;
на фиг. 13а-13е показан еще один иллюстративный вариант реализации самоходного модуля согласно настоящему изобретению и поэтапно показан один из иллюстративных вариантов реализации процесса взаимодействия таких самоходных модулей друг с другом;
на фиг. 14-20 показан еще один иллюстративный вариант реализации самоходного модуля согласно настоящему изобретению и поэтапно показан один из иллюстративных вариантов реализации процесса взаимодействия таких самоходных модулей друг с другом;
на фиг. 21 схематично показан трехмерный объект, сформированный из самоходных модулей согласно настоящему изобретению, введенных во взаимодействие друг с другом.
Осуществление
Ниже со ссылкой на прилагаемые чертежи описаны некоторые примеры возможных вариантов реализации настоящего изобретения, при этом не следует считать, что приведенное ниже описание определяет или ограничивает объем настоящего изобретения.
В приведенном ниже описании хорошо известные функции или конструкции не описаны подробно, поскольку это может завуалировать неважными сведениями сущность настоящего изобретения.
Следует понимать, что в приведенном далее описании термины, такие как «первый», «второй», «верхний», «нижний», «боковой», «передний», «задний» и т.п., использованы исключительно для удобства, при этом их не следует толковать как ограничительные термины. В частности, в контексте настоящего изобретения, если в описании настоящего документа явно не указано иное, термины «первый», «второй», «третий» или т.п.использованы для того, чтобы отличать друг от друга элементы, компоненты, части, узлы, модули, блоки, варианты реализации или т.п., к которым они относятся, а не для целей описания какой-либо конкретной взаимосвязи между ними.
Следует понимать при упоминании объекта в единственном числе возможно и наличие множества таких объектов и наоборот, если явно не указано иное или иное явным образом не следует из контекста настоящего документа.
Грамматические связи выражают любые или все альтернативные и объединенные сочетания связанных пунктов, предложений, слов и т.п., если только явно не указано иное или иное явным образом не следует из контекста. Таким образом следует понимать, что термин «или» в целом означает «и/или» и т.п.
Перечисление диапазонов значений в данном документе не является ограничением, поскольку ссылается в индивидуальном порядке на любые или все значения, попадающие в диапазон, если иное не указано в данном документе, при этом каждое отдельное значение в таком диапазоне включено в описание так, как если бы оно было отдельно приведено в данном документе.
Слова «приблизительно», «примерно» или т.п.в сочетании с числовым значением следует толковать как указывающие на возможное отклонение, которое по мнению специалиста в области техники обеспечивало бы надлежащее функционирование для решения необходимой задачи. Диапазоны значений и/или числовые значения приведены в данном документе исключительно в качестве примеров и не ограничивают объем описанных вариантов реализации.
Все примеры, приведенные в данном документе, или по меньшей мере часть из них, равно как и соответствующие слововыражения («например», «такой как», «в частности» или т.п.), по существу использованы для улучшения понимания сущности настоящего изобретения и для обеспечения полноты раскрытия настоящего изобретения, однако эти слововыражения не накладывают каких-либо ограничений на варианты реализации настоящего изобретения, для описания которых они использованы в настоящем документе, в частности не ограничивают практические варианты реализации элементов, компонентов, частей, узлов, модулей, блоков, устройств, средств и/или т.п., используемых для раскрытия особенностей конструкции и функционирования настоящего изобретения.
Термины и определения, примененные в описании данного документа
Термин «иллюстративный» означает неограничивающий пример, вариант или иллюстрацию. Аналогичным образом, термины «например» и «в качестве примера», использованные в данном документе, задают перечни из одного или более неограничивающих примеров, вариантов или иллюстраций. Как использовано в данном документе, схема «выполнена с возможностью» осуществлять функцию во всех случаях, когда эта схема содержит необходимые аппаратные средства и код (если какой-либо код необходим) для осуществления функции независимо от того, является ли исполнение этой функции заблокированным или запрещенным (например, посредством заданной оператором настройки, заводской настройки или т.п.).
В контексте настоящего изобретения термин «соответствие» и его производные (т.е. прилагательное, глагол, наречие) не обязательно означает точную согласованность или точное равенство в чем-либо, чему-либо или между чем-либо в каком-либо отношении, а может подразумевать отхождение или отклонение от указанного равенства в заданных пределах. Например, термин «соответствующие координаты», если из описания настоящего документа явно не следует иное, означает не только, что эти координаты могут быть точно равны друг другу или могут точно совпадать, но и подразумевает, что указанное равенство или совпадение координат может быть установлено с некоторой погрешностью (например, с погрешностью работы GPS-системы) или в рамках заданной географической области, окружающей точную географическую точку или область, на которую указывают эти координаты, или точное географическое место, на которое указывают эти координаты.
В контексте настоящего изобретения термин «самоходный модуль», если из описания настоящего документа явно не следует иное, относится к самостоятельному аппарату или устройству, собранному конструктивно из типовых или стандартных (имеющихся на рынке) деталей, элементов, блоков, узлов, устройств и/или т.п.и способному передвигаться на собственной тяге по поверхности перемещения, по суше (земле), по воде, под водой и/или по поверхности стационарного или подвижного физического объекта, по меньшей мере частично находящегося по меньшей мере в одном из воздушного пространства, наземного пространства, надводного пространства и подводного пространства.
В контексте настоящего изобретения термин «корпус», если из описания настоящего документа явно не следует иное, относится к каркасу, остову, оболочке, обшивке, фюзеляжу, несущей опоре или телу физического неживого объекта, каждый из которых может быть образован из одиночного опорного элемента или совокупности соединенных между собой опорных элементов, при этом тип, форма, габаритные размеры, конструктивные особенности и/или материал такого корпуса никак конкретно не ограничены.
В контексте настоящего изобретения термин «модуль», если из описания настоящего документа явно не следует иное, относится к функциональному элементу или совокупности функциональных элементов устройства в виде детали, узла, блока или др. сборочной единицы, которая выполняет определенные технические функции, обеспечивающие выполнение функций устройства. Модуль в целом может быть реализован на практике с использованием сочетания известных конструктивных элементов, сочетания известных конструктивных элементов и известных аппаратных средств, сочетания известных конструктивных элементов и известных программно-аппаратных средств или сочетания известных аппаратных средств и известных программных средств. Так, например, управляющее устройство может быть реализовано с использованием программно-аппаратных средств. В контексте настоящего изобретения управляющее устройство может представлять собой физическое устройство, аппарат или множеством модулей, выполненных с использованием аппаратного обеспечения, например, с помощью, интегральной схемы специального назначения (ASIC) или программируемой логической интегральной схемы (FPGA), или же комбинации аппаратного и программного обеспечения, например, с помощью микропроцессорной системы и набора инструкций, реализующих функциональные возможности управляющего устройства, которые (при выполнении) трансформируют микропроцессорную систему в устройство или систему специального назначения (например, автопилот). Кроме того, каждый из модулей, описанных в данном документе, или по меньшей мере один из них может быть реализован в виде комбинации аппаратного и программного обеспечения, при этом одни функциональные возможности, описанные в настоящем документе в отношении одного из модулей, могут быть реализованы только за счет аппаратного обеспечения, а другие функциональные возможности, описанные в настоящем документе в отношении того же самого модуля или иного модуля, могут быть реализованы путем использования аппаратного обеспечения в сочетании с программным обеспечением. Кроме того, в контексте настоящего изобретения модуль стыковки может быть выполнен с возможностью разъемного взаимодействия по меньшей мере с одним летательным аппаратом, при этом модуль стыковки может быть реализован с использованием сочетания известных конструктивных элементов, сочетания известных конструктивных элементов и аппаратных средств, сочетания конструктивных элементов и программно-аппаратных средств или сочетания аппаратных средств и программных средств.
В контексте настоящего изобретения термин «навигационная команда», если из описания настоящего документа явно не следует иное, относится к инструкции, направляемой летательным аппаратам, которые должны быть соединены с корпусом самоходного модуля или которые были отсоединены от корпуса самоходного модуля. Навигационные команды могут быть выданы или обеспечены системой управления перемещением самоходных модулей в виде цифровых или аналоговых данных, инструкций, управляющих сигналов или т.п. Навигационные команды могут быть первоначально сгенерированы, без ограничения, автооператором, оператором (как локально, так и удаленно) и/или системой обхода препятствий. В частности, навигационные команды могут быть приняты, например, блоком управления для управления летательным аппаратом, входящим в состав самоходного модуля.
В контексте настоящего изобретения термин «зарядное устройство», если из описания настоящего документа явно не следует иное, относится к устройству для восполнения запаса хода самоходного модуля путем подзарядки его аккумуляторной батареи и/или путем восполнения его запаса топлива.
В контексте настоящего изобретения термин «база данных», если из описания настоящего документа явно не следует иное, подразумевает под собой любой структурированный набор данных, не зависящий от конкретной структуры, программного обеспечения по управлению базой данных, аппаратного обеспечения компьютера, на котором данные хранятся, используются или иным образом оказываются доступны для использования. База данных может находиться на том же оборудовании, выполняющем процесс, который сохраняет или использует информацию, хранящуюся в базе данных, или же она может находиться на отдельном оборудовании, например, выделенном сервере или на множестве серверов.
В контексте настоящего изобретения термин «парковочная станция», если из описания настоящего документа явно не следует иное, означает неподвижную или подвижную конструкцию, приспособленную для размещения, хранения и/или восполнения запаса хода (например, подзарядки) в ней самоходных модулей.
В контексте настоящего изобретения термин «управляющее устройство» относится к вычислительному оборудованию, исполняющему компьютерную программу для обеспечения возможности получения запросов (например, от других вычислительных устройств) по сети связи, возможности выполнения или обработки таких запросов и/или возможности отправки таких запросов по сети связи (например, на другие вычислительные устройства). Вычислительное оборудование, исполняющее компьютерную программу, может представлять собой, без ограничения, один физический компьютер или одну физическую компьютерную систему. В контексте настоящего изобретения использование термина «управляющее устройство» не означает, что каждая вычислительная задача (например, полученные инструкции или команды) или любая иная конкретная задача будут получены, выполнены или послужат причиной выполнения одним и тем же управляющим устройством (т.е. одним и тем же программным и/или аппаратным обеспечением), что означает, что любое количество элементов программного обеспечения или аппаратного обеспечения может быть вовлечено в получение/отправку, выполнение или может послужить причиной для выполнения любой задачи или запроса, или последствий любой задачи или запроса, при этом все это программное и аппаратное обеспечение может быть реализовано в виде одного или нескольких управляющих устройств.
В контексте настоящего изобретения термин «сервер» относится к вычислительному оборудованию, исполняющему компьютерную программу для обеспечения возможности получения запросов (например, от других вычислительных устройств) по сети связи, возможности выполнения или обработки таких запросов и/или возможности отправки таких запросов по сети связи (например, на другие вычислительные устройства). Вычислительное оборудование, исполняющее компьютерную программу, может представлять собой, без ограничения, один физический компьютер или одну физическую компьютерную систему. В контексте настоящего изобретения использование термина «сервер» не означает, что каждая вычислительная задача (например, полученные инструкции или команды) или любая иная конкретная задача будут получены, выполнены или послужат причиной выполнения одним и тем же сервером (т.е. одним и тем же программным и/или аппаратным обеспечением), что означает, что любое количество элементов программного обеспечения или аппаратного обеспечения может быть вовлечено в получение/отправку, выполнение или может послужить причиной для выполнения любой задачи или запроса, или последствий любой задачи или запроса, при этом все это программное и аппаратное обеспечение может быть реализовано в виде одного или нескольких серверов.
Самоходный модуль
На фиг. 1 показан один из иллюстративных вариантов реализации самоходной системы 1000, содержащей два самоходных модуля 500, взаимодействующих друг с другом или между собой с обеспечением возможности перемещения по меньшей мере одного или каждого из указанных самоходных модулей 500 по поверхности перемещения, которая может представлять собой поверхность земли или поверхность любого иного объекта, который в свою очередь может находиться на поверхности земли, поверхности воды или в воздушном пространстве, или возможности их взаимного перемещения (например, перемещения друг относительно друга, перемещения друг по другу, перемещения друг на друге, размещения друг на друге и т.п.).
Как показано на фиг. 1, каждый из взаимодействующих между собой самоходных модулей 500 содержит сферический или шарообразный корпус 100, снабженный ножками 200, отходящими от корпуса 100 в разные стороны и выполненными за одно целое с корпусом 100, при этом ножки 200 равномерно распределены по поверхности корпуса 100.
В одном из вариантов реализации настоящего изобретения самоходная система 1000 может содержать два или более взаимодействующих между собой самоходных модулей 500 (например, два, три, четыре, пять, шесть, семь, восемь, девять, десять или более самоходных модулей 500).
Как показано на фиг. 1, каждая из ножек 200, которыми снабжен корпус 100 в каждом из самоходных модулей 500, образована из удлиненной части или стержня 210, конец которого снабжен шляпкой 220, выполненной за одно целое со стержнем 210 и расположенной на заданном расстоянии от поверхности корпуса 100.
Кроме того, как наглядно показано на фиг.1, взаимодействие самоходных модулей 500, входящих в состав системы 1000, друг с другом происходит в результате входа одной или более ножек 200, которыми снабжен корпус 100 в одном из взаимодействующих между собой самоходных модулей 500, в разъемное взаимодействие за раз с одной или более ножек 200, которыми снабжен корпус 100 в другом из взаимодействующих между собой самоходных модулей 500, под управлением управляющих устройств указанных самоходных модулей 500. В частности, разъемное взаимодействие ножки 200 одного самоходного модуля 500 с ножкой другого самоходного модуля 500 происходит в результате входа шляпки 220, входящей в состав ножки 200 одного самоходного модуля 500, в разъемное взаимодействие со шляпкой 220, входящей в состав ножки 200 другого самоходного модуля 500, при этом указанные шляпки 220 по меньшей мере временно (в течение заданного периода времени) взаимодействуют между собой в результате входа внутренних сторон шляпок 220 по меньшей мере частично в разъемный контакт друг с другом с последующим выходом из взаимодействия или контакта друг с другом (как показано на фиг. 2).
Следует отметить, что возможен вариант реализации настоящего изобретения, в котором по меньшей мере одна или каждая из ножек 200, которыми снабжен корпус 100 в одном из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе системы 1000, может входить за раз (например, за единицу времени или заданный период времени) во взаимодействие с двумя или более ножками 200, которыми снабжен корпус 100 в другом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе системы 1000. Кроме того, возможен вариант реализации настоящего изобретения, в котором в каждый момент времени (например, за единицу времени или заданный период времени) взаимодействия самоходных модулей 500 друг с другом только по одной ножке 200 от каждого из указанных взаимодействующих между собой самоходных модулей 500 могут входить во взаимодействие или контакт друг с другом. Кроме того, возможен еще один вариант реализации настоящего изобретения, в котором в каждый момент времени (например, за единицу времени или заданный период времени) взаимодействия самоходных модулей 500 друг с другом одна из ножек 200, которыми снабжен корпус 100 в одном из указанных взаимодействующих между собой самоходных модулей 500, может входить во взаимодействие или контактировать с двумя или более ножками, которыми снабжен корпус 100 в другом из указанных взаимодействующих между собой самоходных модулей 500. Кроме того, возможен и еще один вариант реализации настоящего изобретения, в котором в каждый момент времени (например, за единицу времени или заданный период времени) взаимодействия самоходных модулей 500 друг с другом каждая из двух или более ножек 200, которыми снабжен корпус 100 в одном из указанных взаимодействующих между собой самоходных модулей 500, может входить во взаимодействие или контактировать с одной или более ножками, которыми снабжен корпус 100 в другом из указанных взаимодействующих между собой самоходных модулей 500.
Следует также отметить, что управляющее устройство в каждом из самоходных модулей 500 может обеспечивать возможность изменения состояния по меньшей мере одной из ножек 200 (например, одной, двух, трех, четырех или более ножек 200), которыми снабжен корпус 100 в указанном самоходном модуле 500, в каждый заданный момент времени, что в свою очередь обеспечивает возможность перемещения указанного самоходного модуля 500 по поверхности перемещения (например, в целевую область, в которой этот самоходный модуль может войти во взаимодействие с другим самоходным модулем 500 или может быть размещен на парковочной станции), возможность размещения указанного самоходного модуля 500 на другом самоходном модуле 500 (в частности, на его корпусе 100) или возможность перемещения указанного самоходного модуля 500 по другому самоходному модулю 500 (в частности, по его корпусу 100).
В частности, управляющее устройство по меньшей мере в одном или каждом из взаимодействующих самоходных модулей 500, может обеспечивать реализацию по меньшей мере одной из следующих возможностей, связанных с изменением состояния одной или более ножек 200 в указанном самоходном модуле: (i) возможность управляемого изменения пространственной ориентации по меньшей мере одной из ножек 200 (например, одной, двух, трех, четырех или более ножек 200), которыми снабжен корпус 100 в указанном самоходном модуле 500, в каждый заданный момент времени; (ii) возможность управляемого изменения длины по меньшей мере одной из ножек 200 (например, одной, двух, трех, четырех или более ножек 200), которыми снабжен корпус 100 в указанном самоходном модуле 500, в каждый заданный момент времени; и (iii) возможность управляемого изменения формы по меньшей мере одной из ножек 200 (например, одной, двух, трех, четырех или более ножек 200), которыми снабжен корпус 100 в указанном самоходном модуле 500, в каждый заданный момент времени.
В одном из вариантов реализации настоящего изобретения шляпка 220 по меньшей мере в одной или каждой из ножек 200, которыми снабжен корпус 100 в каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть жестко закреплена или съемно установлена на конце стержня 210. В другом варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200, которыми снабжен корпус 100 по меньшей мере в одном или каждом из самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть соединена с корпусом 100 с возможностью отсоединения от него (т.е. разъемно соединена) или съемно закреплена на корпусе 100, при этом указанная ножка 200 имеет фиксированную длину или имеет изменяемую длину. Еще в одном варианте реализации настоящего изобретения по меньшей мере две ножки 200, которыми снабжен корпус 100 по меньшей мере в одном или каждом из самоходных модулей 500, показанных на фиг.1 в составе самоходной системы 1000, могут иметь одинаковую длину или разную длину, предварительно подобранную (выбранную) или предварительно отрегулированную (заданную) с обеспечением возможности перемещения самоходного модуля 500 по поверхности перемещения.
В ином варианте реализации настоящего изобретения корпус 100 по меньшей мере в одном или каждом из самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может представлять собой каркас, остов, несущую раму, или любую иную подходящую несущую конструкцию, известную в уровне техники, при этом ножки 200 могут быть закреплены на соединенных между собой конструктивных элементах, образующих указанную несущую конструкцию. В одном из разновидностей данного варианта реализации настоящего изобретения на несущей конструкции, в виде которой может быть выполнен корпус 100 по меньшей мере в одном или каждом из самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть закреплена обшивка, а ножки 200 могут быть закреплены на указанной обшивке с возможностью открепления от него или без возможности открепления от нее или могут быть выполнены за одно целое с указанной обшивкой, при этом указанная обшивка может быть выполнена из гибкого или жесткого материала. В другой разновидности данного варианта реализации настоящего изобретения несущая конструкция, в виде которой может быть выполнен корпус 100 по меньшей мере в одном или каждом из самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть по меньшей мере частично покрыта покрытием, а ножки 200 могут быть закреплены на указанном покрытии с возможностью открепления от него или без возможности открепления от него или могут быть выполнены за одно целое с указанным покрытием, при этом указанное покрытие может быть выполнено из гибкого или жесткого материала. Еще в одной разновидности данного варианта реализации настоящего изобретения несущая конструкция, в виде которой может быть выполнен корпус 100 по меньшей мере в одном или каждом из самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть по меньшей мере частично окружена оболочкой, а ножки 200 могут быть закреплены на указанной оболочке с возможностью открепления от нее или без возможности открепления от нее или могут быть выполнены за одно целое с указанным покрытием, при этом указанная оболочка может быть выполнена из гибкого или жесткого материала. В иной разновидности данного варианта реализации настоящего изобретения несущая конструкция, в виде которой может быть выполнен корпус 100 по меньшей мере в одном или каждом из самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000 ножки 200 могут быть установлены на конструктивных элементах, образующих несущую конструкцию, в виде которой может быть выполнен корпус 100 в самоходном модуле 500, показанном на фиг. 1, и могут проходить через обшивку, покрытие или оболочку, размещенную поверх указанных конструктивных элементов в результате ее крепления к указанной несущей конструкции.
Корпус 100 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может иметь любые подходящие геометрическую форму и габаритные размеры, характерные для любого самоходного модуля, известного в уровне техники, и может быть выполнен из любого подходящего материала, известного в уровне техники и обычно используемого для изготовления различных корпусов самоходных модулей, в частности из композитного материала (например, из композитных сэндвич-панелей), металла (например, из соединенных между собой швеллерных балок из металла или стали), алюминия (например, из соединенных между собой алюминиевых несущих балок), пластика (например, из цельнолитого куска пластика), титанового материала (например, из сэндвич-панелей из титана), любого иного подходящего материала, известного в уровне техники, в том числе с использованием любого подходящего сочетания перечисленных материалов (например, из сэндвич панели или панелей из титана с алюминиевым сотовым сердечником), и/или т.п. Таким образом, тип, форма, габаритные размеры и материал корпуса 100 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей, показанных на фиг. 1 в составе самоходной системы 1000, никак конкретно не ограничены в рамках настоящего изобретения.
В одном из вариантов реализации настоящего изобретения корпус 100 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть выполнен в виде правильной или неправильной трехмерной геометрической фигуры, например, в виде куба, кубоида, шара или сферы, квадратной пирамиды, тетраэдра (треугольной пирамиды), шестиугольной пирамиды, треугольной призмы, шестигранника (октаэдра), пятиугольной призмы, шестиугольной призмы, двенадцатигранника, эллипсоида, двадцатигранника (икосаэдра), конуса, цилиндра или любой иной известной трехмерной фигуры.
В другом варианте реализации настоящего изобретения по меньшей мере часть корпуса 100 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может иметь в разрезе (продольном или поперечном сечении) форму треугольника, квадрата, круга, овала, прямоугольника, параллелограмма, ромба, трапеции, четырехугольника, пятиугольника, шестиугольника, семиугольника, восьмиугольника, девятиугольника, десятиугольника, двадцатиугольника или любой иной известной правильной или неправильной геометрической фигуры.
В некотором другом варианте реализации настоящего изобретения корпус 100 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть выполнен с возможностью изменения своей формы и/или своих размеров. В первой разновидности данного варианта реализации настоящего изобретения корпус 100 по меньшей мере в одном или каждом из самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может представлять собой складную сетку (не показана), снабженную жесткими или упругими ножками 200 и выполненную с возможностью раскладывания или развертывания с обеспечением увеличения ее габаритов или геометрических размеров, при этом указанный самоходный модуль 500 может дополнительно содержать приводное устройство (не показано), работающее под управлением управляющего устройства самоходного модуля 500, который в свою очередь может получать управляющие команды от внешнего источника управления, и функционально соединенное с указанной складной сеткой самоходного модуля 500 с обеспечением возможности ее раскладывания или развертывания в ответ на управляющие команды внешнего источника управления. Следует отметить, что первой разновидности варианта реализации настоящего изобретения складная сетка самоходного модуля 500 может находиться в двух состояниях: (1) сложенное состояние или свернутое состояние, которое соответствует первоначальному (исходному) положению сетки самоходного модуля 500 и в котором указанная сетка самоходного модуля 500 может находиться при перемещении самоходного модуля 500 по поверхности перемещения до входа указанного самоходного модуля 500 во взаимодействие по меньшей мере с одним другим самоходным модулем 500 или после выхода указанного самоходного модуля 500 из взаимодействия с указанным по меньшей мере одним другим самоходным модулем 500, и (2) развернутое состояние, в котором сетка самоходного модуля 500 может находится при взаимодействии указанного самоходного модуля 500 по меньшей мере с одним другим самоходным модулем 500 для формирования функциональной пары самоходных модулей, при этом сетка самоходного модуля 500 в свернутом состоянии имеет свой минимальный габаритный размер, а сетка самоходного модуля 500 в развернутом состоянии имеет свой максимальный габаритный размер. Во второй разновидности данного варианта реализации настоящего изобретения корпус 100 по меньшей мере в одном или каждом из самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть образован из отдельных функциональных частей (не показаны), по меньшей мере одна или каждая из которых может быть снабжена одной или более жестких или упругих ножек 200, и может дополнительно содержать приводное устройство (не показано), функционально соединенное с указанными функциональными частями с обеспечением возможности раздвигания или развертывания этих функциональных частей для изменения формы и/или габаритных размеров корпуса 100. В третьей разновидности данного варианта реализации настоящего изобретения корпус 100 по меньшей мере в одном или каждом из самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть образован из отдельных управляемых функциональных частей (не показаны), по меньшей мере одна или каждая из которых может быть снабжена одной или более жестких или упругих ножек 200, а управляющее устройство указанного самоходного модуля 500 может быть дополнительно соединен с возможностью обмена данными с указанными управляемыми функциональными частями с обеспечением возможности смещения (изменения пространственных местоположений) указанных функциональных частей по отношению друг к другу в ответ на управляющие команды указанного управляющего устройства самоходного модуля 500, которые в свою очередь могут быть сгенерированы управляющим устройством самоходного модуля 500 в ответ на соответствующие управляющие команды внешнего источника управления, для изменения формы и/или габаритных размеров корпуса 100. В четвертой разновидности данного варианта реализации настоящего изобретения корпус 100 по меньшей мере в одном или каждом из самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть образован из отдельных управляемых функциональных частей (не показаны), по меньшей мере одна или каждая из которых может быть снабжена одной или более жестких или упругих ножек 200, а управляющее устройство указанного самоходного модуля 500 может быть соединен с возможностью обмена данными с указанными управляемыми функциональными частями с обеспечением возможности раздвигания или развертывания этих функциональных частей в ответ на управляющие команды указанного управляющего устройства самоходного модуля 500, которые в свою очередь могут быть сгенерированы указанным управляющим устройством самоходного модуля 500 в ответ на соответствующие управляющие команды внешнего источника управления, для изменения формы и/или размеров корпуса 100.
В ином варианте реализации настоящего изобретения корпус 100 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть снабжен двумя или более ножками 200, каждая из которых имеет заданную длину и которые установлены на корпусе 100 на заданном расстоянии друг от друга.
В некотором ином варианте реализации настоящего изобретения корпус 100 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть образован из двух или более разъемно состыкованных или соединенных между собой отдельных фюзеляжей, каркасов, остовов, корпусов или иных несущих конструкций, известных в уровне техники (например, из двух, трех, четырех, пяти, шести, семи, восьми, девяти, десяти или более отдельных несущих конструкций).
В других вариантах реализации настоящего изобретения корпус 100 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть выполнен с возможностью доставки, перевозки или транспортировки людей, различных живых существ и/или грузов различных типов (твердых, газообразных, жидких, текучих, сыпучих, вязких, радиоактивных, химических, и/или т.п.) по поверхности перемещения в целевое место, которое в свою очередь может находиться на поверхности земли (на суше), на поверхности подвижного или неподвижного наземного объекта (например, на наземной платформе, мосту, телевышке, кузове грузовика, крыше здания или т.п.), поверхности неподвижного водного объекта (например, на морской платформе, морском буе, понтоне или т.п.), поверхности подвижного водного объекта (например, на палубе корабля, баржи, теплохода, лайнера, катера или т.п.), поверхности неподвижного или подвижного воздушного объекта (например, на фюзеляже самолета, аэростате, или т.п.) или поверхности любых иных подходящих объектов, известных в уровне техники.
В некоторых других вариантах реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200, которыми может быть снабжен корпус 100 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть по меньшей мере частично вделана или встроена в корпус 100 с возможностью по меньшей мере частичного или полного выдвижения из корпуса 100 с использованием механизма выдвижения ножки для изменения степени выдвижения ножки (например, привода или приводного устройства для выдвижения ножки), который может быть также назван как механизм или модуль для изменения длины ножки и работой которого может управлять управляющее устройство самоходного модуля 500, в том числе в ответ на соответствующие управляющие команды, принимаемые указанным управляющим устройством самоходного модуля 500 от внешнего источника управления. Таким образом, в таких вариантах реализации настоящего изобретения механизм выдвижения ножки для изменения степени выдвижения ножки может быть функционально соединен по меньшей мере с одной из ножек 200 с обеспечением возможности полного или по меньшей мере частичного выдвижения (вытягивания) указанной по меньшей мере одной ножки 200 из корпуса 100 или возможности задвигания (втягивания) указанной по меньшей мере одной ножки 200 при приведении в действие (т.е. включении или активации) указанного механизма выдвижения ножки под управлением управляющего устройства самоходного модуля 500. Следует отметить, что в таких вариантах реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть исходно или первоначально полностью или по меньшей мере частично втянута или задвинута в корпус 100, так что указанная ножка 200 может быть переведена или может переходить из задвинутого состояния (втянутого) в выдвинутое состояние (вытянутое состояние) и далее наоборот из указанного выдвинутого состояния (вытянутого состояния) в указанное задвинутое состояние (втянутое состояние) под управлением управляющего устройства самоходного модуля 500. В качестве альтернативы в данном варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть исходно или первоначально полностью или по меньшей мере частично выдвинута (вытянута), так что указанная ножка 200 может быть переведена или может переходить из выдвинутого состояния (вытянутого состояния), в котором она имеет большую длину или визуально становится более длинной (т.е. удлиненной), в задвинутое состояние (втянутое состояние), в котором она имеет меньшую длину или визуально становится менее длинной (т.е. короткой), и далее наоборот из указанного задвинутого состояния (втянутого состояния) в указанное выдвинутое состояние (вытянутое состояние) под управлением управляющего устройства самоходного модуля 500. Другими словами, в таких вариантах реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть выполнена выдвижной, а возможность выдвижения (вытягивания) и возможность задвигания (втягивания) указанной ножки 200 могут быть реализованы под управлением управляющего устройства самоходного модуля 500, выдающего управляющие команды на механизм выдвижения ножки (не показан) для изменения степени выдвижения ножки, который по меньшей мере задает протяженность или длину указанной ножки 200 за пределами корпуса 100. В таких вариантах реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может чередовать (попеременно принимать через заданные периоды времени) выдвинутое состояние (вытянутое состояние) и задвинутое состояние (втянутое состояние) при перемещении указанного самоходного модуля 500 по поверхности перемещения или при взаимодействии указанной ножки 200 с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500. Следует также отметить, что в таких вариантах реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может принимать задвинутое состояние (втянутое состояние) при прекращении перемещения указанного самоходного модуля 500 по поверхности перемещения (т.е. при остановке движения указанного самоходного модуля 500 по поверхности перемещения) или при выходе указанной ножки 200 из взаимодействия с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500. В качестве альтернативы в таком варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может принимать выдвинутое состояние (вытянутое состояние) при прекращении перемещения указанного самоходного модуля 500 по поверхности перемещения (т.е. при остановке движения указанного самоходного модуля 500 по поверхности перемещения) или при выходе указанной ножки 200 из взаимодействия с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500, и может принимать задвинутое состояние (втянутое состояние) при начале перемещения указанного самоходного модуля 500 по поверхности перемещения (т.е. при старте движения указанного самоходного модуля 500 по поверхности перемещения) или при входе указанной ножки 200 во взаимодействие с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500. Таким образом, в данном варианте реализации настоящего изобретения возможность попеременного выдвижения и задвигания по меньшей мере одной ножки 200 в каждом самоходном модуле 500 (т.е. последовательное осуществление или чередование цикла задвигания и цикла выдвигания по меньшей мере одной ножки 200, причем вне зависимости от того, какой из этих циклов будет осуществлен первым) обеспечивает возможность перемещения указанного самоходного модуля 500 по поверхности перемещения, в том числе возможность размещения корпуса 100, относящегося к указанному самоходному модулю 500, на корпусе 100, относящемся к другому самоходному модулю 500, или возможность перемещения корпуса 100, относящегося к указанному самоходному модулю 500, по корпусу 100, относящемуся к другому самоходному модулю 500, при взаимодействии этих двух самоходных модулей 500 друг с другом в результате ввода их ножек 200 во взаимодействие друг с другом.
В некоторых иных вариантах реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200, которыми может быть снабжен корпус 100 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть по меньшей мере частично вделана (встроена) в корпус 100 или закреплена на корпусе 100 с возможностью по меньшей мере частичного или полного раздвигания с использованием механизма раздвигания ножки для изменения степени раздвигания ножки (например, привода или приводного устройства для раздвигания ножки), который может быть также назван как механизм или модуль для изменения длины ножки и работой которого может управлять управляющее устройство самоходного модуля 500, в том числе в ответ на соответствующие управляющие команды, принимаемые указанным управляющим устройством самоходного модуля 500 от внешнего источника управления. Таким образом, в таких вариантах реализации настоящего изобретения механизм раздвигания ножки для изменения степени раздвигания ножки может быть функционально соединен по меньшей мере с одной из ножек 200 с обеспечением возможности полного или по меньшей мере частичного раздвигания указанной по меньшей мере одной ножки 200 при приведении в действие (т.е. включении или активации) указанного механизма раздвигания ножки под управлением управляющего устройства самоходного модуля 500. Следует отметить, что в таких вариантах реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть исходно или первоначально полностью или по меньшей мере частично сложена, так что указанная ножка 200 может быть переведена или может переходить из сложенного состояния в раздвинутое состояние и далее наоборот из указанного раздвинутого состояния в указанное сложенное состояние под управлением управляющего устройства самоходного модуля 500. В качестве альтернативы в данном варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть исходно или первоначально полностью или по меньшей мере частично раздвинута, так что указанная ножка 200 может быть переведена или может переходить из раздвинутого состояния, в котором она имеет большую длину или визуально становится более длинной (т.е. удлиненной), в сложенное состояние, в котором она имеет меньшую длину или визуально становится менее длинной (т.е. короткой), и далее наоборот из указанного сложенного состояния в указанное раздвинутое состояние под управлением управляющего устройства самоходного модуля 500. Другими словами, в таких вариантах реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть выполнена раздвижной или телескопической, а возможность раздвигания и возможность складывания указанной ножки 200 могут быть реализованы под управлением управляющего устройства самоходного модуля 500, выдающего управляющие команды на механизм раздвигания ножки (не показан) для изменения степени раздвигания ножки, который по меньшей мере задает протяженность или длину указанной ножки 200. В таких вариантах реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может чередовать (попеременно принимать через заданные периоды времени) раздвинутое состояние и сложенное состояние при перемещении указанного самоходного модуля 500 по поверхности перемещения или при взаимодействии указанной ножки 200 с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500. Следует также отметить, что в таких вариантах реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может принимать сложенное состояние при прекращении перемещения указанного самоходного модуля 500 по поверхности перемещения (т.е. при остановке движения указанного самоходного модуля 500 по поверхности перемещения) или при выходе указанной ножки 200 из взаимодействия с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500. В качестве альтернативы в таком варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может принимать раздвинутое состояние при прекращении перемещения указанного самоходного модуля 500 по поверхности перемещения (т.е. при остановке движения указанного самоходного модуля 500 по поверхности перемещения) или при выходе указанной ножки 200 из взаимодействия с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500, и может принимать сложенное состояние при начале перемещения указанного самоходного модуля 500 по поверхности перемещения (т.е. при старте движения указанного самоходного модуля 500 по поверхности перемещения) или при входе указанной ножки 200 во взаимодействие с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500. Таким образом, в данном варианте реализации настоящего изобретения возможность попеременного сложения и раздвигания по меньшей мере одной ножки 200 в каждом самоходном модуле 500 (т.е. последовательное осуществление или чередование цикла сложения и цикла раздвигания по меньшей мере одной ножки 200, причем вне зависимости от того, какой из этих циклов будет осуществлен первым) обеспечивает возможность перемещения указанного самоходного модуля 500 по поверхности перемещения, в том числе возможность размещения корпуса 100, относящегося к указанному самоходному модулю 500, на корпусе 100, относящемся к другому самоходному модулю 500, или возможность перемещения корпуса 100, относящегося к указанному самоходному модулю 500, по корпусу 100, относящемуся к другому самоходному модулю 500, при взаимодействии этих двух самоходных модулей 500 друг с другом в результате ввода их ножек 200 во взаимодействие друг с другом.
В различных вариантах реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200, которыми может быть снабжен корпус 100 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть по меньшей мере частично вделана (встроена) в корпус 100 или закреплена на корпусе 100 с возможностью по меньшей мере частичного или полного раскладывания с использованием механизма раскладывания ножки для изменения степени раскладывания ножки (например, привода или приводного устройства для раскладывания ножки), который может быть также назван как механизм или модуль для изменения длины ножки и работой которого может управлять управляющее устройство самоходного модуля 500, в том числе в ответ на соответствующие управляющие команды, принимаемые указанным управляющим устройством самоходного модуля 500 от внешнего источника управления. Таким образом, в таких вариантах реализации настоящего изобретения механизм раскладывания ножки для изменения степени раскладывания ножки может быть функционально соединен по меньшей мере с одной из ножек 200 с обеспечением возможности полного или по меньшей мере частичного раскладывания указанной по меньшей мере одной ножки 200 при приведении в действие (т.е. включении или активации) указанного механизма раскладывания ножки под управлением управляющего устройства самоходного модуля 500. Следует отметить, что в таких вариантах реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть исходно или первоначально полностью или по меньшей мере частично сложена, так что указанная ножка 200 может быть переведена или может переходить из сложенного состояния в разложенное состояние и далее наоборот из указанного разложенного состояния в указанное сложенное состояние под управлением управляющего устройства самоходного модуля 500. В качестве альтернативы в данном варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть исходно или первоначально полностью или по меньшей мере частично разложена, так что указанная ножка 200 может быть переведена или может переходить из разложенного состояния, в котором она имеет большие размеры или визуально становится большей в размерах, в сложенное состояние, в котором она имеет меньшие размеры или визуально становится меньшей в размерах, и далее наоборот из указанного сложенного состояния в указанное разложенное состояние под управлением управляющего устройства самоходного модуля 500. Другими словами, в таких вариантах реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть выполнена раздвижной или телескопической, а возможность раскладывания и возможность складывания указанной ножки 200 могут быть реализованы под управлением управляющего устройства самоходного модуля 500, выдающего управляющие команды на механизм раскладывания ножки (не показан) для изменения степени раскладывания ножки, который по меньшей мере задает протяженность или длину указанной ножки 200. В таких вариантах реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может чередовать (попеременно принимать через заданные периоды времени) разложенное состояние и сложенное состояние при перемещении указанного самоходного модуля 500 по поверхности перемещения или при взаимодействии указанной ножки 200 с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500. Следует также отметить, что в таких вариантах реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может принимать сложенное состояние при прекращении перемещения указанного самоходного модуля 500 по поверхности перемещения (т.е. при остановке движения указанного самоходного модуля 500 по поверхности перемещения) или при выходе указанной ножки 200 из взаимодействия с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500. В качестве альтернативы в таком варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может принимать разложенное состояние при прекращении перемещения указанного самоходного модуля 500 по поверхности перемещения (т.е. при остановке движения указанного самоходного модуля 500 по поверхности перемещения) или при выходе указанной ножки 200 из взаимодействия с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500, и может принимать сложенное состояние при начале перемещения указанного самоходного модуля 500 по поверхности перемещения (т.е. при старте движения указанного самоходного модуля 500 по поверхности перемещения) или при входе указанной ножки 200 во взаимодействие с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500. Таким образом, в данном варианте реализации настоящего изобретения возможность попеременного сложения и разложения по меньшей мере одной ножки 200 в каждом самоходном модуле 500 (т.е. последовательное осуществление или чередование цикла сложения и цикла разложения по меньшей мере одной ножки 200, причем вне зависимости от того, какой из этих циклов будет осуществлен первым) обеспечивает возможность перемещения указанного самоходного модуля 500 по поверхности перемещения, в том числе возможность размещения корпуса 100, относящегося к указанному самоходному модулю 500, на корпусе 100, относящемся к другому самоходному модулю 500, или возможность перемещения корпуса 100, относящегося к указанному самоходному модулю 500, по корпусу 100, относящемуся к другому самоходному модулю 500, при взаимодействии этих двух самоходных модулей 500 друг с другом в результате ввода их ножек 200 во взаимодействие друг с другом.
В различных других вариантах реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200, которыми может быть снабжен корпус 100 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть по меньшей мере частично вделана (встроена) в корпус 100 или закреплена на корпусе 100 с возможностью по меньшей мере частичного или полного развертывания с использованием механизма развертывания ножки для изменения степени развертывания ножки (например, привода или приводного устройства для развертывания ножки), который может быть также назван как механизм или модуль для изменения формы/размеров ножки и работой которого может управлять управляющее устройство самоходного модуля 500, в том числе в ответ на соответствующие управляющие команды, принимаемые указанным управляющим устройством самоходного модуля 500 от внешнего источника управления. Таким образом, в таких вариантах реализации настоящего изобретения механизм развертывания ножки для изменения степени развертывания ножки может быть функционально соединен по меньшей мере с одной из ножек 200 с обеспечением возможности полного или по меньшей мере частичного развертывания указанной по меньшей мере одной ножки 200 при приведении в действие (т.е. включении или активации) указанного механизма развертывания ножки под управлением управляющего устройства самоходного модуля 500. Следует отметить, что в таких вариантах реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть исходно или первоначально полностью или по меньшей мере частично сложена, так что указанная ножка 200 может быть переведена или может переходить из сложенного состояния в развернутое состояние и далее наоборот из указанного развернутого состояния в указанное сложенное состояние под управлением управляющего устройства самоходного модуля 500. В качестве альтернативы в данном варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть исходно или первоначально полностью или по меньшей мере частично развернута, так что указанная ножка 200 может быть переведена или может переходить из развернутого состояния, в котором она имеет большие размеры или визуально становится большей в размерах, в сложенное состояние, в котором она имеет меньшие размеры или визуально становится меньшей в размерах, и далее наоборот из указанного сложенного состояния в указанное развернутое состояние под управлением управляющего устройства самоходного модуля 500. Другими словами, в таких вариантах реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть выполнена раздвижной или телескопической, а возможность развертывания и возможность складывания указанной ножки 200 могут быть реализованы под управлением управляющего устройства самоходного модуля 500, выдающего управляющие команды на механизм развертывания ножки (не показан) для изменения степени развертывания ножки, который по меньшей мере задает или регулирует размеры указанной ножки 200. В таких вариантах реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может чередовать (попеременно принимать через заданные периоды времени) развернутое состояние и сложенное состояние при перемещении указанного самоходного модуля 500 по поверхности перемещения или при взаимодействии указанной ножки 200 с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500. Следует также отметить, что в таких вариантах реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может принимать сложенное состояние при прекращении перемещения указанного самоходного модуля 500 по поверхности перемещения (т.е. при остановке движения указанного самоходного модуля 500 на поверхности перемещения) или при выходе указанной ножки 200 из взаимодействия с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500. В качестве альтернативы в таком варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может принимать развернутое состояние при прекращении перемещения указанного самоходного модуля 500 по поверхности перемещения (т.е. при остановке движения указанного самоходного модуля 500 по поверхности перемещения) или при выходе указанной ножки 200 из взаимодействия с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500, и может принимать сложенное состояние при начале перемещения указанного самоходного модуля 500 по поверхности перемещения (т.е. при старте движения указанного самоходного модуля 500 по поверхности перемещения) или при входе указанной ножки 200 во взаимодействие с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500. Таким образом, в данном варианте реализации настоящего изобретения возможность попеременного сложения и развертывания по меньшей мере одной ножки 200 в каждом самоходном модуле 500 (т.е. последовательное осуществление или чередование цикла сложения и цикла развертывания по меньшей мере одной ножки 200, причем вне зависимости от того, какой из этих циклов будет осуществлен первым) обеспечивает возможность перемещения указанного самоходного модуля 500 по поверхности перемещения, в том числе возможность размещения корпуса 100, относящегося к указанному самоходному модулю 500, на корпусе 100, относящемся к другому самоходному модулю 500, или возможность перемещения корпуса 100, относящегося к указанному самоходному модулю 500, по корпусу 100, относящемуся к другому самоходному модулю 500, при взаимодействии этих двух самоходных модулей 500 друг с другом в результате ввода их ножек 200 во взаимодействие друг с другом.
В различных иных вариантах реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200, которыми может быть снабжен корпус 100 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть по меньшей мере частично вделана (встроена) в корпус 100 или закреплена на корпусе 100 с возможностью изменения свой формы, своих размеров и/или своей пространственной ориентации с использованием механизма управления состоянием ножки для изменения состояния ножки (например, привода или приводного устройства для управления состоянием ножки), работой которого может управлять управляющее устройство самоходного модуля 500, в том числе в ответ на соответствующие управляющие команды, принимаемые указанным управляющим устройством самоходного модуля 500 от внешнего источника управления. Таким образом, в таких вариантах реализации настоящего изобретения механизм управления состоянием ножки для изменения состояния ножки может быть функционально соединен по меньшей мере с одной из ножек 200 с обеспечением возможности полного или по меньшей мере частичного выдвижения, раздвигания, раскладывания, развертывания или т.п.указанной по меньшей мере одной ножки 200 при приведении в действие (т.е. включении или активации) указанного механизма управления состоянием ножки под управлением управляющего устройства самоходного модуля 500.
В различных других вариантах реализации настоящего изобретения корпус 100 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть снабжен одной или более направляющих (например, одной, двумя, тремя, четырьмя, пятью, шестью, семью, восемью, девятью, десятью и большим количеством направляющих корпуса 100), по меньшей мере частично вделанной или встроенной в указанный корпус 100, при этом по меньшей мере на одной или каждой из указанных направляющих корпуса 100 может быть установлена по меньшей мере одна или каждая из ножек 200, которыми может быть снабжен указанный корпус 100, с возможностью перемещения по указанной направляющей. В одной из разновидностей таких вариантов реализации настоящего изобретения одна или более направляющих корпуса 100 могут быть размещены, установлены или закреплены на корпусе 100, то есть могут быть установлены или закреплены с внешней стороны корпуса 100 с использованием любых подходящих соединительных или крепежных средств, известных в уровне техники. Кроме того, в таких вариантах реализации настоящего изобретения корпус 100 может дополнительно содержать модуль перемещения ножки (не показан), работающий под управлением управляющего устройства самоходного модуля 500 и выполненный с возможностью взаимодействия по меньшей мере с одной из ножек 200, которыми снабжен корпус 100, с обеспечением возможности перемещения указанной по меньшей мере одной ножки 200 по меньшей мере по одной из направляющих корпуса 100. В одной из разновидностей данного варианта реализации настоящего изобретения модуль перемещения ножки (не показан) может представлять собой роботизированный манипулятор или захват, выполненный с возможностью захвата по меньшей мере одной из ножек 200, которыми снабжен корпус 100, при приведении его в действие (т.е. при его активации или включении) с обеспечением возможности перемещения указанной захваченной ножки 200 по меньшей мере по одной из направляющих корпуса 100. В другой разновидности данного варианта реализации настоящего изобретения модуль перемещения ножки (не показан) может представлять собой толкатель, выполненный с возможностью кратковременного воздействия по меньшей мере на одну из ножек 200, которыми снабжен корпус 100, с обеспечением возможности перемещения указанной подвергаемой воздействию ножки 200 по меньшей мере по одной из направляющих корпуса 100, при этом корпус 100 может дополнительно содержать привод или приводное устройство (не показано), работающее под управлением управляющего устройства самоходного модуля 500 и функционально соединенное с указанным толкателем с возможностью приведения его в действие (активации или включения) для осуществления взаимодействия с указанной по меньшей мере одной ножкой 200. Еще в одной разновидности данного варианта реализации настоящего изобретения модуль перемещения ножки (не показан) может быть установлен по меньшей мере на одной дополнительной направляющей (не показана), отличной от направляющих корпуса 100, на которых установлены ножки 200, которыми снабжен корпус 100, и может быть выполнен с возможностью перемещения по указанной дополнительной направляющей под управления управляющего устройства самоходного модуля 500 с обеспечением возможности перемещения по меньшей мере одной из ножек 200 по меньшей мере по одной из указанных направляющих корпуса 100. В иной разновидности данного варианта реализации настоящего изобретения модуль перемещения ножки (не показан) может быть дополнительно выполнен с возможностью демонтажа (открепления, отсоединения или съема) по меньшей мере одной из ножек 200, которыми снабжен корпус 100, по меньшей мере с одной из направляющих корпуса 100. В некоторой разновидности данного варианта реализации настоящего изобретения корпусе 100 может быть дополнительно снабжен модулем перемещения направляющей (например, приводом или приводным устройством для перемещения направляющей), который может функционально взаимодействовать или может быть функционально соединен по меньшей мере с одной из направляющих корпуса 100 с обеспечением возможности ее перемещения по отношению к корпусу 100 вместе с одной или более ножками 200, которыми может быть снабжена указанная перемещаемая направляющая корпуса 100. В такой разновидности данного варианта реализации настоящего изобретения каждая из направляющих корпуса 100, которые могут быть перемещены по поверхности корпуса 100 с использованием модуля перемещения направляющей (не показан), может быть установлена или закреплена непосредственно на самом модуле перемещения направляющей, который в свою очередь может быть установлен в корпусе 100 с возможностью перемещения по отношению к нему под управлением управляющего устройства самоходного модуля 500, так что перемещение модуля перемещения направляющей может приводить в движение указанную перемещаемую направляющую корпуса 100 с обеспечением возможности изменения ее положения на корпусе 100 и, следовательно, возможности изменения положения одной или более ножек 200, которые могут быть установлены на указанной перемещаемой направляющей корпуса 100, по отношению к корпусу 100. В качестве альтернативы в такой разновидности данного варианта реализации настоящего изобретения каждая из направляющих корпуса 100, которые могут быть перемещены по поверхности корпуса 100 с использованием модуля перемещения направляющей (не показан), может быть выполнена телескопической, так что модуль перемещения направляющей, в ответ на приведение его в действие под управлением управляющего устройства самоходного модуля 500, может обеспечивать возможность меньшей мере частичного или полного складывания/раскладывания указанной направляющей корпуса 100 и, следовательно, возможность перемещения одной или более ножек 200, которые могут быть установлены на задвигаемых или выдвигаемых сегментах (частях или деталей) указанной телескопической направляющей корпуса 100 по отношению к корпусу 100.
В различных иных вариантах реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200, которыми снабжен корпус 100 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть установлена на корпусе 100 с возможностью поворота вокруг своей оси по отношению к поверхности корпуса 100, при этом для поворота указанной ножки 200 в корпусе 100 может установлен механизм поворота ножки (например, привод для поворота ножки), работающий под управлением управляющего устройства самоходного модуля 500 и функционально соединенный с указанной ножкой 200 с обеспечением возможности его поворота на заданный угол или ее вращения при приведении в действие (активации или включении) указанного механизма поворота ножки в ответ на соответствующие управляющие команды управляющего устройства самоходного модуля 500.
В одном из вариантов реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200, которыми может быть снабжен корпус 100 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть по меньшей мере частично вделана (встроена) в корпус 100 или закреплена на корпусе 100 с возможностью сжатия или удлинения с использованием механизма удлинения ножки для удлинения ножки (например, привода или приводного устройства для удлинения ножки), который может быть также назван как механизм или модуль для изменения длины ножки и работой которого может управлять управляющее устройство самоходного модуля 500, в том числе в ответ на соответствующие управляющие команды, принимаемые указанным управляющим устройством самоходного модуля 500 от внешнего источника управления. Таким образом, в таком варианте реализации настоящего изобретения механизм удлинения ножки для изменения длины ножки может быть функционально соединен по меньшей мере с одной из ножек 200 с обеспечением возможности удлинения или сжатия указанной по меньшей мере одной ножки 200 при приведении в действие (т.е. включении или активации) указанного механизма удлинения ножки под управлением управляющего устройства самоходного модуля 500. Следует отметить, что в таком варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть исходно или первоначально полностью или по меньшей мере частично сжата, так что указанная ножка 200 может быть переведена или может переходить из сжатого состояния, в котором она имеет меньшую длину или визуально становится менее длинной (т.е. короткой), в удлиненного состояние, в котором она имеет большую длину или визуально становится более длинной (т.е. удлиненной), и далее наоборот из указанного удлиненного состояния в указанное сжатое состояние под управлением управляющего устройства самоходного модуля 500. В качестве альтернативы в данном варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть исходно или первоначально полностью или по меньшей мере частично удлинена, так что указанная ножка 200 может быть переведена или может переходить из удлиненного состояния, в котором она имеет большую длину или визуально становится более длинной (т.е. удлиненной), в сжатое состояние, в котором она имеет меньшую длину или визуально становится менее длинной (т.е. короткой), и далее наоборот из указанного сжатого состояния в указанное удлиненное состояние под управлением управляющего устройства самоходного модуля 500. Другими словами, в таком варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть выполнена удлиняемой, а возможность сжатия и возможность удлинения указанной ножки 200 могут быть реализованы под управлением управляющего устройства самоходного модуля 500, выдающего управляющие команды на механизм удлинения ножки (не показан) для изменения длины ножки, который по меньшей мере задает или регулирует протяженность или длину указанной ножки 200. В таком варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может чередовать (попеременно принимать через заданные периоды времени) удлиненное состояние и сложенное состояние при перемещении указанного самоходного модуля 500 по поверхности перемещения или при взаимодействии указанной ножки 200 с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500. Следует отметить, что в таком варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может принимать сложенное состояние при прекращении перемещения указанного самоходного модуля 500 по поверхности перемещения (т.е. при остановке движения указанного самоходного модуля 500 по поверхности перемещения) или при выходе указанной ножки 200 из взаимодействия с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500. Следует также отметить, что в таком варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может принимать удлиненное состояние при начале перемещения указанного самоходного модуля 500 по поверхности перемещения (т.е. при старте движения указанного самоходного модуля 500 по поверхности перемещения) или при входе указанной ножки 200 во взаимодействие с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500. В качестве альтернативы в таком варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может принимать удлиненное состояние при прекращении перемещения указанного самоходного модуля 500 по поверхности перемещения (т.е. при остановке движения указанного самоходного модуля 500 по поверхности перемещения) или при выходе указанной ножки 200 из взаимодействия с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500, и может принимать сжатое состояние при начале перемещения указанного самоходного модуля 500 по поверхности перемещения (т.е. при старте движения указанного самоходного модуля 500 по поверхности перемещения) или при входе указанной ножки 200 во взаимодействие с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500. Таким образом, в данном варианте реализации настоящего изобретения возможность попеременного сжатия и удлинения по меньшей мере одной ножки 200 в каждом самоходном модуле 500 (т.е. последовательное осуществление или чередование цикла сжатия и цикла удлинения по меньшей мере одной ножки 200, причем вне зависимости от того, какой из этих циклов будет осуществлен первым) обеспечивает возможность перемещения указанного самоходного модуля 500 по поверхности перемещения, в том числе возможность размещения корпуса 100, относящегося к указанному самоходному модулю 500, на корпусе 100, относящемся к другому самоходному модулю 500, или возможность перемещения корпуса 100, относящегося к указанному самоходному модулю 500, по корпусу 100, относящемуся к другому самоходному модулю 500, при взаимодействии этих двух самоходных модулей 500 друг с другом в результате ввода их ножек 200 во взаимодействие друг с другом.
В другом варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200, которыми может быть снабжен корпус 100 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть по меньшей мере частично вделана (встроена) в корпус 100 или закреплена на корпусе 100 с возможностью изгибания или распрямления с использованием механизма распрямления ножки для изменения формы ножки (например, привода или приводного устройства для распрямления ножки), который может быть также назван как механизм или модуль для изменения формы ножки и работой которого может управлять управляющее устройство самоходного модуля 500, в том числе в ответ на соответствующие управляющие команды, принимаемые указанным управляющим устройством самоходного модуля 500 от внешнего источника управления. Таким образом, в таком варианте реализации настоящего изобретения механизм распрямления ножки для изменения формы ножки может быть функционально соединен по меньшей мере с одной из ножек 200 с обеспечением возможности распрямления или изгибания указанной по меньшей мере одной ножки 200 при приведении в действие (т.е. включении или активации) указанного механизма распрямления ножки под управлением управляющего устройства самоходного модуля 500. Следует отметить, что в таком варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть исходно или первоначально полностью или по меньшей мере частично изогнута, так что указанная ножка 200 может быть переведена или может переходить из изогнутого состояния, в котором она имеет измененную форму (т.е. становится по меньшей мере частично изогнутой, согнутой, искривленной или криволинейной) или визуально становится более короткой (укороченной), в распрямленное состояние, в котором она имеет в целом прямую форму (становится более прямолинейной или выровненной в прямую линию) или визуально становится более длинной (удлиненной), и далее наоборот из указанного распрямленного состояния в указанное изогнутое состояние под управлением управляющего устройства самоходного модуля 500. В качестве альтернативы в данном варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть исходно или первоначально полностью или по меньшей мере частично распрямлена, так что указанная ножка 200 может быть переведена или может переходить из распрямленного состояния, в котором она имеет в целом прямую форму (становится более прямолинейной или выровненной в прямую линию) или визуально становится более длинной (удлиненной), в изогнутое состояние, в котором она имеет измененную форму (т.е. становится по меньшей мере частично изогнутой, согнутой, искривленной или криволинейной) или визуально становится более короткой (укороченной), и далее наоборот из указанного изогнутого состояния в указанное распрямленное состояние под управлением управляющего устройства самоходного модуля 500. Другими словами, в таком варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг.1 в составе самоходной системы 1000, может быть выполнена способной изменять свою форму, а возможность изгибания и возможность распрямления указанной ножки 200 могут быть реализованы под управлением управляющего устройства самоходного модуля 500, выдающего управляющие команды на механизм распрямления ножки (не показан) для изменения формы ножки, который по меньшей мере задает или регулирует форму указанной ножки 200. В таком варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может чередовать (попеременно принимать через заданные периоды времени) распрямленное состояние и сжатое состояние при перемещении указанного самоходного модуля 500 по поверхности перемещения или при взаимодействии указанной ножки 200 с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500. Следует отметить, что в таком варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может принимать сжатое состояние при прекращении перемещения указанного самоходного модуля 500 по поверхности перемещения (т.е. при остановке движения указанного самоходного модуля 500 по поверхности перемещения) или при выходе указанной ножки 200 из взаимодействия с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500. Следует также отметить, что в таком варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может принимать распрямленное состояние при начале перемещения указанного самоходного модуля 500 по поверхности перемещения (т.е. при старте движения указанного самоходного модуля 500 по поверхности перемещения) или при входе указанной ножки 200 во взаимодействие с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500. В качестве альтернативы в таком варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может принимать распрямленное состояние при прекращении перемещения указанного самоходного модуля 500 по поверхности перемещения (т.е. при остановке движения указанного самоходного модуля 500 по поверхности перемещения) или при выходе указанной ножки 200 из взаимодействия с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500, и может принимать изогнутое состояние при начале перемещения указанного самоходного модуля 500 по поверхности перемещения (т.е. при старте движения указанного самоходного модуля 500 по поверхности перемещения) или при входе указанной ножки 200 во взаимодействие с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500. Таким образом, в данном варианте реализации настоящего изобретения возможность попеременного изгибания и распрямления по меньшей мере одной ножки 200 в каждом самоходном модуле 500 (т.е. последовательное осуществление или чередование цикла изгибания и цикла распрямления по меньшей мере одной ножки 200, причем вне зависимости от того, какой из этих циклов будет осуществлен первым) обеспечивает возможность перемещения указанного самоходного модуля 500 по поверхности перемещения, в том числе возможность размещения корпуса 100, относящегося к указанному самоходному модулю 500, на корпусе 100, относящемся к другому самоходному модулю 500, или возможность перемещения корпуса 100, относящегося к указанному самоходному модулю 500, по корпусу 100, относящемуся к другому самоходному модулю 500, при взаимодействии этих двух самоходных модулей 500 друг с другом в результате ввода их ножек 200 во взаимодействие друг с другом.
Еще в одном варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200, которыми может быть снабжен корпус 100 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть по меньшей мере частично вделана (встроена) в корпус 100 или закреплена на корпусе 100 с возможностью изгибания с использованием механизма изгибания ножки для изменения формы ножки (например, привода или приводного устройства для изгибания ножки), который может быть также назван как механизм или модуль для изменения формы ножки и работой которого может управлять управляющее устройство самоходного модуля 500, в том числе в ответ на соответствующие управляющие команды, принимаемые указанным управляющим устройством самоходного модуля 500 от внешнего источника управления. Таким образом, в таком варианте реализации настоящего изобретения механизм изгибания ножки для изменения формы ножки может быть функционально соединен по меньшей мере с одной из ножек 200 с обеспечением возможности изгибания указанной по меньшей мере одной ножки 200 при приведении в действие (т.е. включении или активации) указанного механизма распрямления ножки под управлением управляющего устройства самоходного модуля 500. Следует отметить, что в таком варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть исходно или первоначально полностью или по меньшей мере частично изогнута, так что указанная ножка 200 может быть переведена или может переходить из одного изогнутого состояния в другое изогнутое состояние, то минуя промежуточное состояние, в котором указанная ножка 200 имеет в целом прямую форму (т.е. становится прямолинейной или выровненной в прямую линию). Другими словами, в таком варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть выполнена способной изменять свою форму, а возможность изгибания указанной ножки 200 в разные стороны может быть реализована под управлением управляющего устройства самоходного модуля 500, выдающего управляющие команды на механизм изгибания ножки (не показан) для изменения формы ножки, который по меньшей мере задает или регулирует форму указанной ножки 200. В таком варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может чередовать (попеременно принимать через заданные периоды времени) разные изогнутые состояния при перемещении указанного самоходного модуля 500 по поверхности перемещения или при взаимодействии указанной ножки 200 с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500. Следует отметить, что в таком варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может принимать первое изогнутое состояние при прекращении перемещения указанного самоходного модуля 500 по поверхности перемещения (т.е. при остановке движения указанного самоходного модуля 500 по поверхности перемещения) или при выходе указанной ножки 200 из взаимодействия с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500. Следует также отметить, что в таком варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может принимать второе изогнутое состояние при начале перемещения указанного самоходного модуля 500 по поверхности перемещения (т.е. при старте движения указанного самоходного модуля 500 по поверхности перемещения) или при входе указанной ножки 200 во взаимодействие с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500. В качестве альтернативы в таком варианте реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может принимать второе изогнутое состояние при прекращении перемещения указанного самоходного модуля 500 по поверхности перемещения (т.е. при остановке движения указанного самоходного модуля 500 по поверхности перемещения) или при выходе указанной ножки 200 из взаимодействия с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500, и может принимать первое изогнутое состояние при начале перемещения указанного самоходного модуля 500 по поверхности перемещения (т.е. при старте движения указанного самоходного модуля 500 по поверхности перемещения) или при входе указанной ножки 200 во взаимодействие с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500. Таким образом, в данном варианте реализации настоящего изобретения возможность попеременного изгибания в разные стороны (т.е. возможность принятия разных изогнутых состояний) по меньшей мере одной ножки 200 в каждом самоходном модуле 500 (т.е. последовательное осуществление или чередование цикла изгибания в одну сторону и цикла изгибания в другую сторону по меньшей мере одной ножки 200, причем вне зависимости от того, какой из этих циклов будет осуществлен первым) обеспечивает возможность перемещения указанного самоходного модуля 500 по поверхности перемещения, в том числе возможность размещения корпуса 100, относящегося к указанному самоходному модулю 500, на корпусе 100, относящемся к другому самоходному модулю 500, или возможность перемещения корпуса 100, относящегося к указанному самоходному модулю 500, по корпусу 100, относящемуся к другому самоходному модулю 500, при взаимодействии этих двух самоходных модулей 500 друг с другом в результате ввода их ножек 200 во взаимодействие друг с другом.
Управляющее устройство, входящее в состав каждого из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, установлено внутри корпуса 100 (в качестве альтернативы может быть установлено на корпусе 100, то есть с наружной стороны корпуса 100) и выполнено с возможностью управления работой самоходного модуля 500, в частности возможностью управления функциональными компонентами (т.е. функциональными устройствами, механизмами, приводами, модулями, функциональными блоками и т.п.) в составе указанного самоходного модуля 500, описанными в данном документе. Таким образом, управляющее устройство самоходного модуля 500 может быть выполнено с возможностью установления связи по меньшей мере с одним или каждым из функциональных компонентов самоходного модуля 500, установленных в корпусе 100 или на нем, с обеспечением возможности выдачи управляющих команд на указанный функциональный компонент самоходного модуля для приведения в действие (т.е. активации или включения), выключения (т.е. деактивации), изменения (задания или настройки) рабочих параметров или изменения (задания или настройки) режима работы указанного функционального компонента самоходного модуля 500.
Управляющее устройство в каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть выполнено с возможностью приема управляющих команд или навигационных команд от внешнего источника управления с обеспечением реализации, например, по меньшей мере одной из следующих функциональных возможностей самоходного модуля 500: (i) возможности приведения в действие (включения или активации) самоходного модуля 500, (ii) возможности деактивации или выключения самоходного модуля 500, (iii) возможности задания или изменения скорости перемещения самоходного модуля 500, (iv) возможности задания или изменения направления перемещения самоходного модуля 500, (v) возможности задания или изменения формы, размеров и/или пространственного положения по меньшей мере одной из ножек 200, (vi) возможности задания или изменения местоположения самоходного модуля 500 по отношению по меньшей мере к одному другому самоходному модулю из взаимодействующих между собой самоходных модулей 500, (vii) возможности направления самоходного модуля 500 по поверхности перемещения из парковочной станции (не показана), места стоянки или текущего местоположения в заданной области пространства в целевую область пространства, в которой предполагается ввести во взаимодействие этот самоходный модуль 500 с одним или более другими самоходными модулями 500 путем ввода их ножек 200 во взаимодействие друг с другом, (viii) возможности отстыковки или отсоединения самоходного модуля 500 от одного или более других самоходных модулей 500 путем вывода их ножек 200 из взаимодействия друг с другом, (ix) возможности направления самоходного модуля 500, отстыкованного или отсоединенного от одного или более других самоходных модулей 500, на одну из парковочных станций (не показаны) для размещения в ней или на ней с обеспечением возможности хранения указанного самоходного модуля 500 в указанной парковочной станции и/или с обеспечением возможности восполнения запаса хода (зарядки) указанного самоходного модуля 500, и (х) возможности направления самоходного модуля 500, отстыкованного или отсоединенного от одного или более других самоходных модулей 500, по поверхности перемещения к целевому самоходному модулю 500 для последующей стыковки или соединения с ним путем ввода их ножек 200 во взаимодействие друг с другом или в целевую область пространства, в которой находится указанный целевой самоходный модуль 500.
Согласно одному из вариантов реализации настоящего изобретения, управляющее устройство по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть установлено снаружи корпуса 100.
Кроме того, в состав каждого из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может входить по меньшей мере одно из следующих средств беспроводной связи: радиоантенна КВ диапазона, радиоантенна УКВ диапазона, радиоантенна СВЧ диапазона, модуль оптической связи, модуль спутниковой связи полудуплекс/симплекс, модуль сотовой связи 2G/3G/4G/LTE/5G, модуль беспроводной связи, модуль проводной связи и т.п., что позволяет указанному самоходному модулю 500 принимать навигационные команды и/или управляющие команды от управляющего устройства, входящего другого самоходного модуля из указанных самоходных модулей 500, или от внешнего источника управления для обеспечения возможности управления работой указанного самоходного модуля 500. Следует отметить, что навигационные команды и/или управляющие команды, принимаемые самоходным модулем 500 от внешнего источника управления или управляющего устройства другого самоходного модуля с использованием средств беспроводной связи самоходного модуля 500, передаются от указанных средств беспроводной связи самоходного модуля 500 на управляющее устройство самоходного модуля 500 для их обработки этим управляющим устройством самоходного модуля 500.
Кроме того, внешний источник управления (не показан), который может установить связь по меньшей мере с одним или каждым из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, выполнен с возможностью получения и обработки данных (в том числе системных запросов) от указанного самоходного модуля 500 и выполнен с возможностью генерирования управляющих команд (инструкций) и/или навигационных команд (инструкций) на основании указанных полученных данных и результатов их обработки с обеспечением возможности выдачи или направления таких сгенерированных управляющих команд и/или навигационных команд на указанный самоходный модуль 500, в том числе в ответ на запрос указанного самоходного модуля 500. Для выдачи навигационных команд и/или управляющих команд по меньшей мере на один или каждый из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, внешний источник управления (не показан) может быть соединен, посредством сети беспроводной связи (не показана), с указанным самоходным модулем 500 с возможностью обмена с ним данными или может быть выполнен с возможностью установления связи, посредством сети беспроводной связи (не показана), с указанным самоходным модулем 500 с возможностью обмена с ним данными.
Согласно иному варианту реализации настоящего изобретения, управляющее устройство по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может выполнять функции (функциональные возможности) внешнего источника управления, описанные в данном документе. Другими словами, в таком варианте реализации настоящего изобретения внешний источник управления (не показан) может быть выполнен в виде одиночного управляющего устройства, входящего в состав одного из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, или в виде совместно работающих управляющих устройств, каждое из которых входит в состав одного из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000.
Согласно другому варианту реализации настоящего изобретения, по меньшей мере один или каждый из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть снабжен одним или более вышеописанными средствами беспроводной связи, при этом средства беспроводной связи указанного самоходного модуля 500 могут быть выполнены с возможностью приема навигационных команд и/или управляющих команд от управляющего устройства другого самоходного модуля из указанных взаимодействующих между собой самоходных модулей 500. В одной из разновидностей данного варианта реализации настоящего изобретения навигационные команды и/или управляющие команды, выдаваемые управляющим устройством второго самоходного модуля 500 на управляющее устройство первого самоходного модуля 500, могут быть созданы или сгенерированы управляющим устройством второго самоходного модуля 500 в ответ на соответствующие навигационные команды и/или управляющие команды, принятые управляющим устройством второго самоходного модуля 500 от внешнего источника управления (не показан).
Согласно еще одному варианту реализации настоящего изобретения, управляющее устройство по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может и не входить в состав указанного самоходного модуля 500, а может быть выполнено в виде внешнего источника управления, например может представлять собой одиночный сервер, который может быть выполнен в виде, например, сервера Dell™ PowerEdge™ с установленной на нем операционной системой Ubuntu Server или Windows Server.
Согласно некоторому варианту реализации настоящего изобретения, управляющее устройство по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может иметь или может получать доступ по меньшей мере к одной удаленной или внешней базе данных (не показана) по сети связи (не показана) или иным (проводным или беспроводным) способом, либо может иметь или может получать доступ по меньшей мере к одной локальной базе данных, хранящейся на запоминающем устройстве (не показано) или в памяти (не показана), входящей в состав такого управляющего устройства.
Согласно некоторому другому варианту реализации настоящего изобретения, протоколы передачи данных и/или технические средства, используемые для передачи данных или обмена данными между управляющими устройствами взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, могут по меньшей мере частично отличаться друг от друга и/или могут по меньшей мере частично совпадать друг с другом. Кроме того, для передачи данных или обмена данными между управляющими устройствами взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, могут быть одновременно использованы один или более стандартных протоколов связи и соответствующих стандартных технических средств связи.
Согласно некоторому другому варианту реализации настоящего изобретения, управляющее устройство по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть дополнительно выполнено с возможностью организации безопасности перемещения указанного самоходного модуля 500 по поверхности перемещения.
Согласно одному из вариантов реализации настоящего изобретения, управляющее устройство по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может представлять собой любое подходящее аппаратное обеспечение, прикладное программное обеспечение, системное программное обеспечение или их любую комбинацию.
Согласно другому варианту реализации настоящего изобретения, функции внешнего источника управления, описанного в данном документе, могут быть разделены между несколькими внешними компьютерными или вычислительными устройствами, например, могут быть реализованы с помощью нескольких серверов, соединенных между собой по сети связи с возможностью взаимного обмена данными.
Согласно еще одному варианту реализации настоящего изобретения, функции внешнего источника управления, описанного в данном документе, может выполнять (i) управляющее устройство одного из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, (ii) группа или совокупность управляющих устройств, входящих в состав по меньшей мере части из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, (iii) управляющее устройство, входящее в состав самоходного модуля 500, который должен быть состыкован по меньшей мере с одним из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, или (iv) любое иное подходящее вычислительное устройство, выполненное с возможностью генерирования управляющих команд и/или навигационных команд и дополнительно выполненное с возможностью выдачи указанных сгенерированных команд на управляющее устройство по меньшей мере одного или каждого из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000.
Сеть связи (не показана), с которой могут быть соединены с возможностью обмена данными взаимодействующие между собой самоходные модули 500, показанные на фиг. 1, по сути позволяет их управляющих устройствам обмениваться друг с другом системными и/или рабочими данными, которые они используют для реализации своих функций или функциональных возможностей, описанных в данном документе, в режиме реального времени или в реальном времени. В качестве такой сети связи может быть использована, например, любая подходящая линия беспроводной связи, известная в уровне техники, например, линия связи на основе технологии беспроводной связи «Wi-Fi», линия связи на основе технологии беспроводной связи «2G», «3G», «4G» или «5G», сеть связи на основе технологии «LTE» и/или т.п.
Согласно иному варианту реализации настоящего изобретения, для осуществления взаимного обмена данными между взаимодействующими между собой самоходными модулями 500, показанными на фиг. 1, в режиме реального времени или в реальном времени их управляющие устройства могут использовать две и более сетей беспроводной связи.
Кроме того, каждый из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, содержит (собственный) встроенный источник питания (не показан), выполненный в виде аккумулятора, одной или более аккумуляторных батарей, генератора на основе двигателя внутреннего сгорания, генератора на основе водородного двигателя, генератора на основе одной или более солнечных батарей или генератора на основе любого иного подходящего источника энергии, известного в уровне техники, при этом такой встроенный источник питания может быть также выполнен с возможностью его подзарядки от внешнего источника питания (не показан) с использованием зарядного устройства (не показано) подходящего типа, подключенного к указанному внешнему источнику питания и выполненному с обеспечением возможности подключения к нему указанного встроенного источника питания. В частности, встроенный источник питания в каждом самоходному модуле 500 соединен, посредством схемы питания самоходного модуля 500, с управляющим устройством самоходного модуля 500 и любыми иными функциональными компонентами самоходного модуля 500, описанными в данном документе, с обеспечением возможности подачи на них питания или возможности их питания.
Согласно некоторому варианту реализации настоящего изобретения, встроенный источник питания по меньшей мере в одном или каждом из самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть заряжен беспроводным способом с использованием внешнего зарядного устройства (не показано), в основе работы которого может лежать, например, принцип электромагнитной индукции, известный специалисту в данной области техники.
Согласно некоторому другому варианту реализации настоящего изобретения, парковочная станция (не показана), в которую управляющее устройство по меньшей мере в одном или в каждом из самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может направлять указанный самоходный модуль 500, может быть снабжена одним или более зарядными устройствами (не показаны), электрически соединенными каждый по меньшей мере с одним из источников питания парковочной станции и обеспечивающими каждое возможность подключения к нему указанного самоходного модуля 500 по меньшей мере для частичной зарядки или по меньшей мере для частичного восполнения запаса хода указанного подключенного самоходного модуля 500, так что этот самоходный модуль 500 может перейти в состояние по меньшей мере с частично восполненным запасом хода или с полностью восполненным запасом хода, что позволяет снова использовать этот самоходный модуль 500 для перемещения самоходного модуля 500 по поверхности перемещения с последующим взаимодействием с другим самоходным модулем 500.
Согласно еще одному варианту реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200, которыми снабжен корпус 100 по меньшей мере в одном или каждом из самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть выполнена с возможностью передачи электроэнергии от зарядного устройства к данному самоходному модулю 500 и/или для передачи электроэнергии от одного самоходного модуля 500 к другому самоходному модулю 500 с обеспечением передачи и распределения заряда между самоходными модулями 500. Возможен вариант осуществления, согласно которому самоходная система 1000 выполнена с возможностью подключения к зарядному устройству посредством самоходных модулей 500, электрически соединенных между собой соответствующими ножками 200.
Возможен вариант осуществления, согласно которому по меньшей мере одна из ножек 200 самоходного модуля 500 выполнена с возможностью электрического соединения с ножкой 200 другого самоходного модуля 500 или корпусом 100 другого самоходного модуля 500 с обеспечением возможности передачи заряда и/или управляющих сигналов другому самоходному модулю 500.
Возможен вариант осуществления, согласно которому самоходная система 1000, в которой по меньшей мере одна из ножек 200 каждого самоходного модуля 500 выполнена с возможностью электрического соединения с ножкой 200 другого самоходного модуля 500 или корпусом 100 другого самоходного модуля 500 с обеспечением возможности передачи заряда и/или управляющих сигналов другому самоходному модулю 500, при этом система 1000 выполнена с возможностью формирования электрического соединения с источником питания и/или потребителем посредством самоходных модулей 500, электрически соединенных между собой соответствующими ножками 200.
Возможен вариант осуществления системы 1000, в которой самоходные модули 500 выполнены с возможностью формирования заданного трехмерного объекта посредством взаимного перемещения и введения во взаимодействие множества самоходных модулей 500 друг с другом посредством ножек 200 соответствующих самоходных модулей. Форма и размер формируемого трехмерного объекта могут быть заданы внешним источником управления.
Возможен вариант осуществления, согласно которому самоходная система 1000 выполнена с возможностью подключения к источнику питания и передачи электроэнергии потребителю посредством самоходных модулей 500, электрически соединенных между собой соответствующими ножками 200. Возможен вариант осуществления, согласно которому самоходная система 1000 выполнена с возможностью подключения к источнику управляющих сигналов и передачи управляющих сигналов потребителю посредством самоходных модулей 500, электрически соединенных между собой соответствующими ножками 200.Электрическое соединение ножки 200 с ножкой 200 другого самоходного модуля 500 или корпусом 100 другого самоходного модуля 500 может осуществляться посредством, например, скользящего контакта, коннектора, расположенного на ножке 200 или корпусе 100 и выполненного с возможностью разъемного подключения для передачи заряда в движении и/или в отдельных промежуточных статичных положениях самоходных модулей 500 друг относительно друга. Следовательно, в отдельных вариантах осуществления, самоходные модули 500 самоходной системы 1000 могут не выходить из взаимодействия друг с другом для восполнения заряда.
Следует отметить, что в вариантах реализации настоящего изобретения, по меньшей мере один из самоходных модулей 500, может быть выведен из взаимодействия с другими самоходными модулями 500 и отдельно подключен к одному или более зарядных устройств парковочной станции для его зарядки или восполнения его запаса хода. В отдельных вариантах осуществления, по меньшей мере один из самоходных модулей 500, электрически соединенный с одним или более другими самоходными модулями 500 может быть подключен к одному или более зарядных устройств парковочной станции для его зарядки или восполнения его запаса хода и/или для зарядки и восполнения запаса хода по меньшей мере одного другого самоходного модуля 500, соединенного с ним. Каждый из источников питания парковочной станции может представлять собой одну или более аккумуляторных батарей, генератор на основе двигателя внутреннего сгорания, генератор на основе водородного двигателя, солнечную батарею и любой иной подходящий источник энергии, известный в уровне техники. Следует также отметить, что по меньшей мере одно или каждое из зарядных устройств (не показаны) в парковочной станции в таких вариантах реализации настоящего изобретения может представлять собой беспроводное зарядное устройство, проводное зарядное устройство или зарядную док-станцию. В качестве альтернативы по меньшей мере одно или каждое из зарядных устройств в парковочной станции в таких вариантах реализации настоящего изобретения может быть выполнено, например, в виде устройства для подачи электрической энергии, устройства для подачи жидкого или газообразного топлива и/или т.п. В качестве еще одной альтернативы по меньшей мере одно или каждое из зарядных устройств в парковочной станции в таких вариантах реализации настоящего изобретения может быть гидравлически соединено с насосом (не показан), соединенным гидравлической линией с резервуаром или емкостью (не показана) с топливом с возможностью забора этого топлива из указанной емкости, с обеспечением возможности подачи указанного забранного объема топлива в топливный бак самоходного модуля 500, гидравлически соединенный с работающим на топливе двигателем самоходного модуля 500, что позволяет восполнить запас хода самоходного модуля 500 (в частности, благодаря по меньшей мере частичному восполнению объема топлива в топливном баке самоходного модуля 500).
Согласно некоторому иному варианту реализации настоящего изобретения, управляющее устройство по меньшей мере в одном или каждом из самоходных модулей 500 с восполненным запасом хода, может дополнительно обеспечивать возможность входа указанного самоходного модуля 500 с восполненным запасом хода во взаимодействие по меньшей мере с одним другим самоходным модулем 500, при этом указанный другой самоходный модуль 500 в течении указанного процесса взаимодействия может находиться на поверхности перемещения указанного самоходного модуля 500 с восполненным запасом хода (например, на поверхности земли или поверхности иного объекта, который в свою очередь может находиться на земле, на поверхности воды и/или в воздухе). В одной из разновидностей данного варианта реализации настоящего изобретения непосредственно самим процессом ввода самоходного модуля 500 с восполненным запасом хода во взаимодействие с другим самоходным модулем 500 работой указанного самоходного модуля 500 с восполненным запасом хода может управлять управляющее устройство, входящее в состав указанного другого самоходного модуля 500, или управляющее устройство, входящее в состав указанного самоходного модуля 500 с восполненным запасом хода, путем выдачи на него управляющих команд и/или навигационных команд.
Согласно одному из вариантов реализации настоящего изобретения, управляющее устройство по меньшей мере в одном или каждом из самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может обеспечивать возможность перемещения указанного самоходного модуля 500 по отношению к одному или более референтных или опорных самоходных модулей из указанных самоходных модулей 500 на заданное расстояние в соответствии с заданным маршрутом перемещения, соответствующим одной из заданных схем или моделей перемещения, которую указанное управляющее устройство самоходного модуля 500 может автоматически или полуавтоматически выбрать в зависимости по меньшей мере от одного из следующих факторов: (i) внешних условий (например температуры, давления, скорости ветра, погоды, ландшафта местности полета и т.п.), которые могут быть определены, выявлены или измерены с использованием показаний одного или более соответствующих датчиков или измерительно-вычислительных приборов/устройств, которыми может быть дополнительно снабжен корпус 100 в указанном самоходном модуле 500; (ii) типа груза, размещенного в корпусе 100, относящемся к указанному самоходному модулю 500; (iii) распределения груза во внутреннем пространстве корпуса 100, которое может быть определено с использованием показаний одного или более датчиков веса, которые могут быть дополнительно установлены в корпусе 100, относящемся к указанному самоходному модулю 500; (iv) помех, мешающих объектов или препятствий на пути следования указанного самоходного модуля 500, которые могут быть выявлены, например, с использованием одного или более сенсоров обнаружения препятствий (например, лидара, локатора, У3-датчика, ИК-сенсора, радара, видеосенсора и/или т.п.) и т.п. В качестве альтернативы в данном варианте реализации настоящего изобретения вместо референтного или опорного самоходного модуля может быть использован любой иной референтный или опорный объект, известный в уровне техники, при этом указанный референтный или опорный объект может быть как подвижным, так и неподвижным.
Согласно еще одному варианту реализации настоящего изобретения, по меньшей мере одна или каждая из ножек 200, которыми снабжен корпус 100 по меньшей мере в одном или каждом из самоходных модулей 500, показанных на фиг.1 в составе самоходной системы 1000, может быть снабжена одним или более неподвижными средствами сцепления (например, кронштейн, захват, крепеж, зацеп, крюк, присоска, магнит и т.п.) для сцепления с поверхностью перемещения, по которой осуществляет перемещение указанный самоходный модуль 500, что обеспечивает возможность перемещения указанного самоходного модуля 500 по указанной поверхности перемещения, в том числе возможность размещения корпуса 100, относящегося к указанному самоходному модулю 500, на корпусе 100, относящемся к другому самоходному модулю 500, или возможность перемещения корпуса 100, относящегося к указанному самоходному модулю 500, по корпусу 100, относящемуся к другому самоходному модулю 500, при взаимодействии этих двух самоходных модулей 500 друг с другом в результате ввода их ножек 200 во взаимодействие друг с другом. В качестве альтернативы в данном варианте реализации настоящего изобретения одним или более средствами сцепления может быть снабжен корпус 100, относящийся к самоходному модулю 500, совершающему перемещение по поверхности перемещения, в частности в дополнение к одной или более ножкам 200, которыми снабжен указанный корпус 100 или вместо (взамен) указанных ножек 200. В одной из разновидностей данного варианта реализации настоящего изобретения по меньшей мере одно или каждое из средств сцепления корпуса 100 и/или по меньшей мере одно или каждое из средств сцепления по меньшей мере в одной или каждой из ножек 200, которыми снабжен корпус 100, может быть выполнено подвижным, при этом управляющее устройство самоходного модуля 500 может быть соединено с указанным подвижным средством сцепления с обеспечением возможности приведения его в действие (т.е. его активации или включения) для его взаимодействия с поверхностью перемещения. Еще в одной разновидностей данного варианта реализации настоящего изобретения по меньшей мере одно или каждое из средств сцепления по меньшей мере в одной из ножек 200, которыми снабжен корпус 100 по меньшей мере в одном из самоходных модулей 500, и указанная ножка 200, соответствующая указанному средству сцепления, могут быть приведены в действие (т.е. активированы или включены) в заданный момент времени с использованием управляющего устройства указанного самоходного модуля 500 для обеспечения возможности перемещения корпуса 100, относящегося к указанному самоходному модулю 500, по поверхности перемещения за счет использования указанной ножки 200 и указанного средства сцепления, при этом в следующий момент времени указанное управляющее устройство указанного самоходного модуля 500 может деактивировать или выключить указанные ранее приведенные в действие ножку 200 и ее средство сцепления и привести в действие (т.е. активировать или включить) по меньшей мере одно или каждое из средств сцепления по меньшей мере в одной другой из указанных ножек 200, которыми снабжен корпус 100 в указанном самоходном модуле 500, так что указанное управляющее устройство самоходного модуля 500 по сути может обеспечивает возможность последовательного приведения в действие по меньшей мере одного или каждого из средств сцепления и по меньшей мере одной из ножек 200, соответствующей указанному средству сцепления, для перемещения корпуса 100, относящегося к указанному самоходному модулю 500, по поверхности перемещения.
Согласно другому варианту реализации настоящего изобретения, по меньшей мере одна или каждая из ножек 200, которыми снабжен корпус 100 по меньшей мере в одном или каждом из самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, и которая может взаимодействовать с другим самоходным модулем из указанных самоходных модулей 500, может быть выполнена с возможностью разъемного взаимодействия с корпусом 100, относящимся к указанному другому самоходному модулю или по меньшей мере с одной из ножек 200, которыми может быть снабжен указанный корпус 100 в другом самоходном модуле 500, с обеспечением возможности размещения этих взаимодействующих между собой самоходных модулей 500 друг на друге (в том числе с формированием трехмерного объекта, состоящего из совокупности введенных во взаимодействие друг с другом самоходных модулей 500) или возможности перемещения указанных введенных во взаимодействие друг с другом самоходных модулей друг по другу.
Согласно еще одному варианту реализации настоящего изобретения, по меньшей мере одна или каждая из ножек 200, которыми снабжен корпус 100 по меньшей мере в одном или каждом из самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть выполнена в виде управляемого захвата, работающего под управлением управляющего устройства указанного самоходного модуля 500 и выполненного с возможностью захвата по меньшей мере одного независимого объекта (например, груза). Таким образом, в данном варианте реализации настоящего изобретения управляющее устройство самоходного модуля 500 может быть дополнительно выполнено с возможностью управления работой каждого из управляемых захватов, в виде которых могут быть выполнены по меньшей мере некоторые ножки 200, которыми снабжен корпус 100 в указанном самоходном модуле 500, с обеспечением возможности захвата по меньшей мере одного независимого объекта и возможности размещения указанного захваченного независимого объекта на корпусе 100, относящемся к указанному самоходному модулю 500, или внутри него. В одной из разновидностей данного варианта реализации настоящего изобретения корпус 100 по меньшей мере в одном или каждом из самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть дополнительно снабжен одним или более приемниками (не показаны), выполненными каждый с возможностью размещения в нем или на нем одного или более независимых объектов, а управляющее устройство указанного самоходного модуля 500 может быть дополнительно выполнено с обеспечением возможности управления работой одного или более управляемых захватов для размещения каждого из захваченных независимых объектов в одном из указанных приемников корпуса 100.
Согласно иному варианту реализации настоящего изобретения, по меньшей мере одна или каждая из ножек 200, которыми снабжен корпус 100 по меньшей мере в одном или каждом из самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть снабжена одним или более управляемых захватов, работающих под управлением управляющего устройства указанного самоходного модуля 500 и выполненных каждый с возможностью захвата по меньшей мере одного независимого объекта (например, груза). Таким образом, в данном варианте реализации настоящего изобретения управляющее устройство самоходного модуля 500 может быть дополнительно выполнено с возможностью управления работой каждого из управляемых захватов, которыми могут быть снабжены по меньшей мере некоторые ножки 200, которыми снабжен корпус 100 в указанном самоходном модуле 500, с обеспечением возможности захвата по меньшей мере одного независимого объекта и возможности размещения указанного захваченного независимого объекта на корпусе 100, относящемся к указанному самоходному модулю 500, или внутри него. В одной из разновидностей данного варианта реализации настоящего изобретения корпус 100 по меньшей мере в одном или каждом из самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть дополнительно снабжен одним или более приемниками (не показаны), выполненными каждый с возможностью размещения в нем или на нем одного или более независимых объектов, а управляющее устройство указанного самоходного модуля 500 может быть дополнительно выполнено с обеспечением возможности управления работой одного или более управляемых захватов для размещения каждого из захваченных независимых объектов в одном из указанных приемников корпуса 100.
Согласно другому варианту реализации настоящего изобретения, корпус 100 по меньшей мере в одном или каждом из самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может быть дополнительно снабжен электромагнитным блоком (не показан), установленным в корпусе 100 или на нем и работающим под управлением управляющего устройства указанного самоходного модуля 500, так что указанное управляющее устройство самоходного модуля 500 обеспечивает возможность приведения в действие (активации или включения) электромагнитного блока корпуса 100 с обеспечением возможности примагничивания по меньшей мере одного независимого металлического объекта к указанному корпусу 100. В одной из разновидностей данного варианта реализации электромагнитный блок может быть установлен по меньшей мере на одной из ножек 200, которыми снабжен корпус 100 по меньшей мере в одном или каждом из самоходных модулей 500.
Согласно некоторому варианту реализации настоящего изобретения, корпус 100 по меньшей мере в одном или каждом из самоходных модулей 500, показанных на фиг. 1 в составе самоходной системы 1000, может дополнительно содержать сенсор позиционирования или навигационный модуль (например, гиросенсор, GPS, Глонасс, радар или т.п.), выполненный с возможностью определения пространственных координат указанного самоходного модуля 500 или положения указанного самоходного модуля 500 по отношению к опорному самоходному модулю в реальном времени, а управляющее устройство указанного самоходного модуля 500 может быть дополнительно соединено с навигационным модулем с возможностью приема определенных пространственных координат и дополнительно выполнено с обеспечением возможности управляемого изменения пространственной ориентации по отношению к корпусу 100, относящемуся к указанному самоходному модулю, формы или длины по меньшей мере одной из ножек 200, которыми снабжен указанный корпус 100, в зависимости от указанных принятых пространственных координат для корректировки положения указанного самоходного модуля 500 в пространстве (например, на поверхности перемещения).
На фиг. 3 показан еще один иллюстративный вариант реализации самоходного модуля 500 согласно настоящему изобретению, при этом фиг. 3 также наглядно иллюстрирует еще один пример процесса взаимодействия самоходных модулей 500 друг с другом.
Каждая из ножек 200, которыми снабжен корпус 100 в каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 3 в составе самоходной системы 1000, закреплена на корпусе 100 с возможностью ее сгибания в разных направлениях с использованием механизма сгибания ножки для изменения формы ножки (например, привода или приводного устройства для сгибания ножки), который входит в состав указанного корпуса 100 и работой которого управляет управляющее устройство самоходного модуля 500, в том числе в ответ на соответствующие управляющие команды, принимаемые указанным управляющим устройством самоходного модуля 500 от внешнего источника управления. Таким образом, механизм сгибания ножки для изменения формы ножки функционально соединен по меньшей мере с одной из ножек 200, которыми снабжен корпус 100 в каждом из самоходных модулей 500, показанных на фиг. 3, с обеспечением возможности сгибания указанной по меньшей мере одной ножки 200 по меньшей мере в двух разных направлениях при приведении в действие (т.е. включении или активации) указанного механизма сгибания ножки в ответ на соответствующие управляющие команды от управляющего устройства самоходного модуля 500. Каждая из ножек 200 в каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 3 в составе самоходной системы 1000, исходно или первоначально полностью согнута в одном из направлений, так что указанная ножка 200 может быть переведена или может переходить из первого согнутого состояния (т.е. из исходного состояния), которое соответствует первоначальному согнутому состоянию и в котором она имеет одну измененную форму (т.е. выполнена по меньшей мере частично изогнутой, согнутой, искривленной или криволинейной в первом направлении), во второе согнутое состояние (т.е. рабочее состояние), которое соответствует рабочему состоянию и в котором она также имеет другую измененную форму (т.е. выполнена по меньшей мере частично изогнутой, согнутой, искривленной или криволинейной, но уже во втором направлении), под управлением управляющего устройства самоходного модуля 500. Следует отметить, что при переходе между распрямленным состоянием и согнутым состоянием каждая ножка 200 в любом из самоходных модулей 500, показанных на фиг. 3, может принимать одно или более промежуточных согнутых состояний, в которых указанная ножка 200 находится в состоянии между исходным состоянием ножки 200 и рабочим состоянием ножки 200. Следует также отметить, что для обеспечения возможности сгибания каждая из ножек 200, которыми снабжен корпус 100 в каждом из самоходных модулей 500, показанных на фиг. 3 в составе самоходной системы 1000, образована из двух шарнирно соединенных между собой частей, одна из которых выполнена с возможностью изменения своего пространственного положения по отношению к другой части из указанных шарнирно соединенных между собой частей ноки 200 под управлением управляющего устройства самоходного модуля 500, в частности путем поворота шарнира, соединяющего между собой указанные части ножки 200 с обеспечением возможности поворота или смещения первой части ножки 200, удаленной от корпуса 100, от которого отходит указанная ножка 200, по отношению ко второй части ножки 200, шарнирно соединенной с указанным корпусом 100, на заданный угол, соответствующий углу поворота шарнира, соединяющего между собой указанные части ножки 200. Другими словами, как показано на фиг. 3, каждая из ножек 200 в каждом из взаимодействующих между собой самоходных модулей 500 может быть выполнена способной изменять свою форму путем сгибания (в частности, может сгибаться пополам с обеспечением размещения этом части ножки 200 под прямым углом по отношению к другой части ножки 200), а возможность сгибания в первом направлении и возможность сгибания во втором направлении указанной ножки 200 могут быть реализованы под управлением управляющего устройства самоходного модуля 500, выдающего управляющие команды на механизм сгибания ножки (не показан) для изменения формы ножки, который по меньшей мере задает или регулирует форму указанной ножки 200. Таким образом, каждая из ножек 200 в каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 3 в составе самоходной системы 1000, может чередовать (попеременно принимать через заданные периоды времени) первое состояние и второе согнутое состояние при перемещении указанного самоходного модуля 500 по поверхности перемещения или при взаимодействии указанной ножки 200 с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500, показанных на фиг. 3 в составе самоходной системы 1000. В частности, как показано на фиг. 3, по меньшей мере одна из ножек 200 в каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 3 в составе самоходной системы 1000, может принимать второе согнутое состояние (т.е. рабочее состояние) за заданный период времени до входа указанной ножки 200 во взаимодействие по меньшей мере с одной из ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500, а также может сохранять указанное второе согнутое состояние в течение периода взаимодействия указанной ножки 200 с указанной по меньшей мере одной ножкой 200, относящейся к указанному другому самоходному модулю 500, и может полностью или по меньшей мере частично сохранять указанное второе согнутое состояние в течение заданного периода времени после выхода указанной ножки 200 из взаимодействия с указанной по меньшей мере одной ножкой 200, относящейся к указанному другому самоходному модулю 500, при этом по истечению указанного заданного периода времени после выхода указанной ножки 200 из взаимодействия с указанной по меньшей мере одной ножкой 200, относящейся к указанному другому самоходному модулю 500, указанная вышедшая из взаимодействия ножка 200 принимает первое согнутое состояние (т.е. исходное состояние). Следует отметить, что, как показано на фиг. 3, при взаимодействии друг с другом ножки 200, относящиеся к взаимодействующим между собой самоходным модулям 500, находятся каждая во втором согнутом состоянии (т.е. в рабочем состоянии), из которого они переходят каждая обратно в первое согнутое состояние (т.е. исходное состояние) по истечению заданного периода времени после их выхода из взаимодействия друг с другом. В одном из вариантов реализации настоящего изобретения ножка 200, которой снабжен корпус 100 в одном из взаимодействующих друг с другом самоходных модулей 500, показанных на фиг. 3, может находиться в первом согнутом состоянии (т.е. исходном состоянии) или втором согнутом состоянии (т.е. рабочем состоянии), а взаимодействующая с ней ножка 200, которой снабжен корпус 100 в другом из указанных взаимодействующих друг с другом самоходных модулей 500, должна находиться во втором согнутом состоянии (т.е. рабочем состоянии). В другом варианте реализации настоящего изобретения ножка 200, которой снабжен корпус 100 в одном из взаимодействующих друг с другом самоходных модулей 500, показанных на фиг. 3, должна находиться во втором согнутом состоянии (т.е. рабочем состоянии), а взаимодействующая с ней ножка 200, которой снабжен корпус 100 в другом из указанных взаимодействующих друг с другом самоходных модулей 500, может находиться в первом согнутом состоянии (т.е. исходном состоянии) или втором согнутом состоянии (т.е. рабочем состоянии). Следует также отметить, что в процессе взаимодействия между собой ножек 200, относящихся к взаимодействующим между собой самоходным модулям 500, показанным на фиг. 3, другие ножки 200, которые также относятся к указанным взаимодействующим между собой самоходным модулям 500 и которые должны следующими войти во взаимодействие друг с другом для продолжения перемещения указанных самоходных модулей 500 относительно друг друга, уже полностью или частично принимают каждая второе согнутое состояние (т.е. рабочее состояние). В качестве альтернативы другие ножки 200, которые относятся к взаимодействующим между собой самоходным модулям 500, показанным на фиг. 3, и которые должны следующими войти во взаимодействие друг с другом для продолжения перемещения указанных самоходных модулей 500 относительно друг друга, могут полностью или частично принять каждая второе согнутое состояние (т.е. рабочее состояние) еще перед входом предыдущих ножек 200, относящихся к указанным взаимодействующим между собой самоходным модулям 500, во взаимодействие друг с другом или уже после выхода указанных предыдущих ножек 200 из взаимодействия друг с другом под управлением управляющих устройств, относящихся к указанным взаимодействующим между собой самоходным модулям 500. В одном из вариантов реализации настоящего изобретения одновременно или по существу одновременно каждая из двух или более ножек 200 во втором согнутом состоянии (т.е. в рабочем состоянии), которыми снабжен корпус 100 в одном из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 3 в составе самоходной системы 1000, может входить во взаимодействие с соответствующей одной из двух или более ножек 200 в первом согнутом состоянии (т.е. исходном состоянии) или втором согнутом состоянии (т.е. рабочем состоянии), которыми снабжен корпус 100 в другом из указанных взаимодействующих между собой самоходных модулей 500, с обеспечением возможности поворотного перемещения указанных самоходных модулей 500 друг относительно друга (например, возможности перемещения корпуса 100, относящегося к одному из взаимодействующих между собой самоходных модулей 500, по корпусу 100, относящемуся к другому из указанных взаимодействующих между собой самоходных модулей 500). Следует отметить, что для выхода самоходных модулей 500, показанных на фиг. 3 в составе самоходной системы 1000, из взаимодействия друг с другом взаимодействующие между собой ножки 200, относящиеся к указанным самоходным модулям 500 и находящиеся каждая во втором согнутом состоянии (т.е. рабочем состоянии), переходят из второго согнутого состояния в первое согнутое состояние (исходное состояние) под управлением управляющих устройств самоходных модулей 500, так что ножки 200 в каждом из вышедших из взаимодействия друг с другом самоходных модулей 200 находятся каждая в первом согнутом состоянии (т.е. исходном состоянии). В одном из вариантов реализации настоящего изобретения для выхода самоходных модулей 500, показанных на фиг.3 в составе самоходной системы 1000, из взаимодействия друг с другом взаимодействующие между собой ножки 200, относящиеся к указанным самоходным модулям 500 и находящиеся каждая во втором согнутом состоянии (т.е. рабочем состоянии), могут переходить из второго согнутого состояния в иное согнутое состояние, отличное от первого согнутого состояния (т.е. отличное от исходного состояния), под управлением управляющих устройств самоходных модулей 500, так что ножки 200 в каждом из вышедших из взаимодействия друг с другом самоходных модулей 200 могут находиться каждая в ином согнутом состоянии, отличном от исходного состояния или рабочего состояния и характеризующемся иной степенью сгибания ножки 200 или иным направлением сгибания ножки 200. После выхода самоходных модулей 500, показанных на фиг. 3, из взаимодействия друг с другом управляющее устройство в каждом из указанных самоходных модулей 500 может обеспечить возможность выполнения по меньшей мере одной из следующих операций: (i) перемещение самоходного модуля 500 по поверхности перемещения (например, по поверхности земли, по асфальту, по дороге или т.п.) путем последовательного или поочередного изменения состояния одной или более из ножек 200, которыми снабжен корпус 100 в указанном самоходном модуле 500, с первого согнутого состояния (т.е. исходного состояния) на второе согнутое состояние (т.е. рабочее состояние) и наоборот с обеспечением возможности взаимодействия каждой из указанных одной или более ножек 200 с указанной поверхностью перемещения в течение каждого цикла взаимодействия указанного самоходного модуля 500 с указанной поверхностью перемещения; (ii) ввод самоходного модуля 500 во взаимодействие с другим самоходным модулем 500 (в том числе снова с самоходным модулем 500, из взаимодействия с которым он только что вышел или из взаимодействия с которым он вышел какое-то время назад) путем последовательного или поочередного изменения состояния одной или более из ножек 200, которыми снабжен корпус 100 в указанном самоходном модуле 500, с первого согнутого состояния (т.е. исходного состояния) на второе согнутое состояние (т.е. рабочее состояние) и наоборот с обеспечением возможности взаимодействия каждой из указанных одной или более ножек 200 во втором согнутом состоянии (рабочем состоянии) с одной или более из ножек 200 в первом согнутом состоянии (т.е. исходном состоянии) или втором согнутом состоянии (т.е. рабочем состоянии), которыми снабжен корпус 100 в указанном другом самоходном модуле 500, в течение каждого цикла взаимодействия друг с другом ножек 200, относящихся к указанным взаимодействующим между собой самоходным модулям 500.
На фиг. 4 показан еще один иллюстративный вариант реализации самоходного модуля 500 согласно настоящему изобретению, при этом фиг. 4 также наглядно иллюстрирует еще один пример процесса взаимодействия самоходных модулей 500 друг с другом.
Каждая из ножек 200, которыми снабжен корпус 100 в каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 4 в составе самоходной системы 1000, закреплена на корпусе 100 с возможностью ее сгибания или распрямления с использованием механизма распрямления ножки для изменения формы ножки (например, привода или приводного устройства для распрямления ножки), который входит в состав указанного корпуса 100 и работой которого управляет управляющее устройство самоходного модуля 500, в том числе в ответ на соответствующие управляющие команды, принимаемые указанным управляющим устройством самоходного модуля 500 от внешнего источника управления. Таким образом, механизм распрямления ножки для изменения формы ножки функционально соединен по меньшей мере с одной из ножек 200, которыми снабжен корпус 100 в каждом из самоходных модулей 500, показанных на фиг. 4, с обеспечением возможности распрямления или сгибания указанной по меньшей мере одной ножки 200 при приведении в действие (т.е. включении или активации) указанного механизма распрямления ножки в ответ на соответствующие управляющие команды от управляющего устройства самоходного модуля 500. Каждая из ножек 200 в каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 4 в составе самоходной системы 1000, исходно или первоначально полностью распрямлена, так что указанная ножка 200 может быть переведена или может переходить из распрямленного состояния (т.е. из исходного состояния), в котором она имеет в целом прямую форму (т.е. выполнена прямолинейной или выровненной в прямую линию) и визуально выглядит более длинной (т.е. удлиненной), в согнутое состояние (т.е. рабочее состояние), в котором она имеет измененную форму (т.е. выполнена по меньшей мере частично изогнутой, согнутой, искривленной или криволинейной) и визуально выглядит более короткой (т.е. укороченной), под управлением управляющего устройства самоходного модуля 500. Следует отметить, что при переходе между распрямленным состоянием (т.е. исходным состоянием) и согнутым состоянием (т.е. рабочим состоянием) каждая ножка 200 в любом из самоходных модулей 500, показанных на фиг. 4, может принимать одно или более промежуточных состояний, в которых указанная ножка 200 находится в состоянии между указанным исходным состоянием ножки 200 и указанным рабочим состоянием ножки 200. Следует также отметить, что для обеспечения возможности сгибания каждая из ножек 200, которыми снабжен корпус 100 в каждом из самоходных модулей 500, показанных на фиг. 4 в составе самоходной системы 1000, образована из двух шарнирно соединенных между собой частей, одна из которых выполнена с возможностью изменения своего пространственного положения по отношению к другой части из указанных шарнирно соединенных между собой частей под управлением управляющего устройства самоходного модуля 500, в частности путем поворота шарнира, соединяющего между собой указанные части ножки 200 с обеспечением возможности поворота или смещения первой части ножки 200, удаленной от корпуса 100, от которого отходит указанная ножка 200, по отношению ко второй части ножки 200, шарнирно соединенной с указанным корпусом 100, на заданный угол, соответствующий углу поворота шарнира, соединяющего между собой указанные части ножки 200. Другими словами, как показано на фиг. 4, каждая из ножек 200 в каждом из взаимодействующих между собой самоходных модулей 500 может быть выполнена способной изменять свою форму путем сгибания (в частности, сгибаться пополам с обеспечением размещения части ножки 200 под прямым углом), а возможность сгибания и возможность распрямления указанной ножки 200 могут быть реализованы под управлением управляющего устройства самоходного модуля 500, выдающего управляющие команды на механизм распрямления ножки (не показан) для изменения формы ножки, который по меньшей мере задает или регулирует форму указанной ножки 200. Таким образом, каждая из ножек 200 в каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 4 в составе самоходной системы 1000, может чередовать (попеременно принимать через заданные периоды времени) распрямленное состояние и согнутое состояние при перемещении указанного самоходного модуля 500 по поверхности перемещения или при взаимодействии указанной ножки 200 с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500, показанных на фиг. 4 в составе самоходной системы 1000. В частности, как показано на фиг. 4, по меньшей мере одна из ножек 200 в каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 4 в составе самоходной системы 1000, может принимать согнутое состояние за заданный период времени до входа указанной ножки 200 во взаимодействие по меньшей мере с одной из ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500, а также может сохранять указанное согнутое состояние в течение периода взаимодействия указанной ножки 200 с указанной по меньшей мере одной ножкой 200, относящейся к указанному другому самоходному модулю 500, и может полностью или по меньшей мере частично сохранять указанное согнутое состояние в течение заданного периода времени после выхода указанной ножки 200 из взаимодействия с указанной по меньшей мере одной ножкой 200, относящейся к указанному другому самоходному модулю 500, при этом по истечению указанного заданного периода времени после выхода указанной ножки 200 из взаимодействия с указанной по меньшей мере одной ножкой 200, относящейся к указанному другому самоходному модулю 500, указанная вышедшая из взаимодействия ножка 200 принимает распрямленное состояние. Следует отметить, что, как показано на фиг. 4, при взаимодействии друг с другом ножки 200, относящиеся к взаимодействующим между собой самоходным модулям 500, находятся каждая в согнутом состоянии, из которого они переходят каждая обратно в распрямленное состояние по истечению заданного периода времени после их выхода из взаимодействия друг с другом. Следует также отметить, что в процессе взаимодействия между собой ножек 200, относящихся к взаимодействующим между собой самоходным модулям 500, другие ножки 200, которые также относятся к указанным взаимодействующим между собой самоходным модулям 500 и которые должны следующими войти во взаимодействие друг с другом для продолжения перемещения указанных самоходных модулей 500 относительно друг друга, уже принимают каждая согнутое состояние (или по меньшей мере частично согнутое состояние). В качестве альтернативы другие ножки 200, которые относятся к взаимодействующим между собой самоходным модулям 500 и которые должны следующими войти во взаимодействие друг с другом для продолжения перемещения указанных самоходных модулей 500 относительно друг друга, могут принять каждая согнутое состояние (или по меньшей мере частично согнутое состояние) еще перед входом предыдущих ножек 200, относящихся к указанным взаимодействующим между собой самоходным модулям 500, во взаимодействие друг с другом или уже после выхода указанных предыдущих ножек 200 из взаимодействия друг с другом под управлением управляющих устройств, относящихся к указанным взаимодействующим между собой самоходным модулям 500. В одном из вариантов реализации настоящего изобретения одновременно или по существу одновременно каждая из двух или более ножек 200 в согнутом состоянии, которыми снабжен корпус 100 в одном из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 4 в составе самоходной системы 1000, может входить во взаимодействие с соответствующей одной из двух или более ножек 200 в согнутом состоянии, которыми снабжен корпус 100 в другом из указанных взаимодействующих между собой самоходных модулей 500, с обеспечением возможности поворотного перемещения указанных самоходных модулей 500 друг относительно друга (например, возможности перемещения корпуса 100, относящегося к одному из взаимодействующих между собой самоходных модулей 500, по корпусу 100, относящемуся к другому из указанных взаимодействующих между собой самоходных модулей 500). Следует отметить, что для выхода самоходных модулей 500, показанных на фиг. 4 в составе самоходной системы 1000, из взаимодействия друг с другом взаимодействующие между собой ножки 200, относящиеся к указанным самоходным модулям 500 и находящиеся каждая в согнутом состоянии, переходят из согнутого состояния в распрямленное состояние под управлением управляющих устройств самоходных модулей 500, так что ножки 200 в каждом из вышедших из взаимодействия друг с другом самоходных модулей 200 находятся каждая в распрямленном состоянии. После выхода самоходных модулей 500, показанных на фиг. 4, из взаимодействия друг с другом управляющее устройство в каждом из указанных самоходных модулей 500 может обеспечить возможность выполнения по меньшей мере одной из следующих операций: (i) перемещение самоходного модуля 500 по поверхности перемещения (например, по поверхности земли, по асфальту, по дороге или т.п.) путем последовательного или поочередного изменения состояния одной или более из ножек 200, которыми снабжен корпус 100 в указанном самоходном модуле 500, с выпрямленного состояния (т.е. исходного состояния) на согнутое состояние (т.е. рабочее состояние) и наоборот с обеспечением возможности взаимодействия каждой из указанных одной или более ножек 200 с указанной поверхностью перемещения в течение каждого цикла взаимодействия указанного самоходного модуля с указанной поверхностью перемещения; (ii) ввод самоходного модуля 500 во взаимодействие с другим самоходным модулем 500 (в том числе снова с самоходным модулем 500, из взаимодействия с которым он только что вышел или из взаимодействия с которым он вышел какое-то время назад) путем последовательного или поочередного изменения состояния одной или более из ножек 200, которыми снабжен корпус 100 в указанном самоходном модуле 500, с выпрямленного состояния (т.е. исходного состояния) на согнутое состояние (т.е. рабочее состояние) и наоборот с обеспечением возможности взаимодействия каждой из указанных одной или более ножек 200 в согнутом состоянии (т.е. рабочем состоянии) с одной или более из ножек 200 в согнутом состоянии (т.е. рабочем состоянии), которыми снабжен корпус 100 в указанном другом самоходном модуле 500, в течение каждого цикла взаимодействия друг с другом ножек 200, относящихся к указанным взаимодействующим между собой самоходным модулям 500.
На фиг. 5 показан еще один иллюстративный вариант реализации самоходного модуля 500 согласно настоящему изобретению, при этом фиг. 5 также наглядно иллюстрирует еще один пример процесса взаимодействия самоходных модулей 500 друг с другом.
Каждая из ножек 200, которыми снабжен корпус 100 в каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 5 в составе самоходной системы 1000, закреплена на корпусе 100 с возможностью ее наклона в разных направлениях с использованием механизма наклона ножки для изменения пространственного положения ножки или изменения пространственной ориентации ножки (например, привода или приводного устройства для наклона ножки), который входит в состав указанного корпуса 100 и работой которого управляет управляющее устройство самоходного модуля 500, в том числе в ответ на соответствующие управляющие команды, принимаемые указанным управляющим устройством самоходного модуля 500 от внешнего источника управления. Таким образом, механизм наклона ножки для изменения пространственной ориентации ножки функционально соединен по меньшей мере с одной из ножек 200, которыми снабжен корпус 100 в каждом из самоходных модулей 500, показанных на фиг. 5, с обеспечением возможности наклона в первом направлении или наклона во втором направлении указанной по меньшей мере одной ножки 200 при приведении в действие (т.е. включении или активации) указанного механизма распрямления ножки в ответ на соответствующие управляющие команды от управляющего устройства самоходного модуля 500. Каждая из ножек 200 в каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 5 в составе самоходной системы 1000, исходно или первоначально наклонена в первом направлении, так что указанная ножка 200 может быть переведена или может переходить из первого наклонного состояния (т.е. из исходного состояния), в котором она имеет в целом прямую форму (т.е. выполнена прямолинейной или выровненной в прямую линию) и расположена по одним (предварительно заданным) углом к корпусу 100, от которого она отходит, во второе наклонное состояние (т.е. рабочее состояние), в котором она имеет ту же прямую форму и те же размеры и в котором она расположена под другим углом к указанному корпусу 100, под управлением управляющего устройства самоходного модуля 500. Следует отметить, что при переходе между первым наклонным состоянием (т.е. исходным состоянием) и вторым наклонным состоянием (т.е. рабочим состоянием) каждая ножка 200 в любом из самоходных модулей 500, показанных на фиг. 5, может принимать одно или более промежуточных наклонных состояний, в которых угол наклона ножки 200 находится в диапазоне между углом наклона ножки, соответствующим исходному состоянию ножки 200, и углом наклона ножки 200, соответствующим рабочему состоянию ножки 200. Следует также отметить, что для обеспечения возможности наклона каждая из ножек 200, которыми снабжен корпус 100 в каждом из самоходных модулей 500, показанных на фиг. 5 в составе самоходной системы 1000, шарнирно соединена с указанным корпусом 100 с обеспечением возможности изменения ее пространственной ориентации по отношению к этому корпусу 100 под управлением управляющего устройства самоходного модуля 500, в частности путем поворота шарнира, соединяющего указанную ножку 200 с указанным корпусом 100, при этом угол наклона указанной ножки 200 по сути соответствует углу поворота указанного шарнира. Другими словами, как показано на фиг. 5, каждая из ножек 200 в каждом из взаимодействующих между собой самоходных модулей 500 может быть выполнена способной изменять свою пространственную ориентацию путем наклона на заданный угол по отношению к корпусу 100, от которого она отходит, а возможность наклона в первом направлении и возможность наклона во втором направлении указанной ножки 200 могут быть реализованы под управлением управляющего устройства самоходного модуля 500, выдающего управляющие команды на механизм наклона ножки (не показан) для изменения пространственной ориентации ножки, который по меньшей мере задает или регулирует угол наклона указанной ножки 200. Таким образом, каждая из ножек 200 в каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 5 в составе самоходной системы 1000, может чередовать (попеременно принимать через заданные периоды времени) первое наклонное состояние и второе наклонное состояние при перемещении указанного самоходного модуля 500 по поверхности перемещения или при взаимодействии указанной ножки 200 с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500, показанных на фиг. 5 в составе самоходной системы 1000. В частности, по меньшей мере одна из ножек 200 по меньшей мере в одном из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 5 в составе самоходной системы 1000, может принимать второе наклонное состояние за заданный период времени до входа указанной ножки 200 во взаимодействие по меньшей мере с одной из ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500, а также может сохранять указанное второе наклонное состояние в течение периода взаимодействия указанной ножки 200 с указанной по меньшей мере одной ножкой 200, относящейся к указанному другому самоходному модулю 500, и может полностью или по меньшей мере частично сохранять указанное второе наклонное состояние в течение заданного периода времени после выхода указанной ножки 200 из взаимодействия с указанной по меньшей мере одной ножкой 200, относящейся к указанному другому самоходному модулю 500, при этом по истечению указанного заданного периода времени после выхода указанной ножки 200 из взаимодействия с указанной по меньшей мере одной ножкой 200, относящейся к указанному другому самоходному модулю 500, указанная вышедшая из взаимодействия ножка 200 частично или полностью принимает первое наклонное состояние. Как показано на фиг. 5, при взаимодействии друг с другом ножки 200, относящиеся к взаимодействующим между собой самоходным модулям 500, находятся в разных состояниях, в частности одна ножка 200, которой снабжен корпус 100 в одном из указанных самоходных модулей 500, находится в исходном состоянии, а четыре ножки 200, которыми снабжен корпус 100 в другом из указанных самоходных модулей 500, находятся в своих рабочих состояниях, в которых они взаимодействуют каждая с указанной ножкой 200 в исходном состоянии с обеспечением ее зажатия или сжатия с разных сторон (т.е. захвата), при этом после выхода из взаимодействия с ножкой 200 в исходном состоянии указанные четыре ножки 200 переходят каждая из своего рабочего состояния в свое исходное состояние (в частности, по истечению заданного периода времени с момента их выхода из взаимодействия с ножкой 200 в исходном состоянии). В одном из вариантов реализации настоящего изобретения при взаимодействии друг с другом ножки 200, относящиеся к взаимодействующим между собой самоходным модулям 500, показанным на фиг. 5, могут находиться каждая в рабочем состоянии, при этом одна или более из ножек 200 в рабочем состоянии, которыми снабжен корпус 100 в одном из указанных взаимодействующих между собой самоходных модулей 500, может быть зажата или сжата с разных сторон (т.е. захвачена) с помощью двух или более ножек 200 в рабочем состоянии, которыми снабжен корпус 100 в другом из указанных взаимодействующих между собой самоходных модулей 500. В другом варианте реализации настоящего изобретения при взаимодействии друг с другом ножки 200, относящиеся к взаимодействующим между собой самоходным модулям 500, показанным на фиг. 5, могут находиться в разных состояниях, при этом одна или более из ножек 200 в исходном состоянии, которыми снабжен корпус 100 в одном из указанных взаимодействующих между собой самоходных модулей 500, может быть зажата или сжата с разных сторон с помощью двух или более ножек 200 в рабочем состоянии, которыми снабжен корпус 100 в другом из указанных взаимодействующих между собой самоходных модулей 500.
Следует также отметить, что в процессе взаимодействия между собой ножек 200, которыми снабжены корпуса 100 во взаимодействующих между собой самоходных модулях 500, показанных на фиг. 5, другие ножки 200, которые также относятся к указанным взаимодействующим между собой самоходным модулям 500 и которые должны следующими войти во взаимодействие друг с другом для продолжения перемещения указанных самоходных модулей 500 относительно друг друга, также могут аналогичным образом находиться в вышеописанных разных состояниях, так что для зажатия или сжатия с разных сторон следующей ножки 200 в исходном состоянии, относящейся к одному из указанных взаимодействующих между собой самоходных модулей 500, могут быть также использованы четыре ножки 200 в рабочих состояниях (в качестве альтернативы две ножки 200, три ножки 200, пять ножек 200 и более ножек 200 в рабочих состояниях), относящиеся к другому из указанных взаимодействующих между собой самоходных модулей 500, при этом указанные четыре ножки 200 в рабочих состояниях могут представлять собой следующие четыре ножки 200 этого самоходного модуля 500 (т.е. новые четыре ножки 200 этого самоходного модуля 500, отличные от предыдущих четырех ножек 200 этого самоходного модуля 500, ранее использованных для захвата предыдущей одной ножки 200 в исходном состоянии) или могут содержать по меньшей мере одну предыдущую ножку 200 этого самоходного модуля 500 в рабочем состоянии и следующие ножки 200 этого самоходного модуля 500 в рабочем состоянии (т.е. новые ножки 200 этого самоходного модуля 500, ни одна из которых не относится к предыдущим четырем ножкам 200 этого самоходного модуля 500, ранее использованным для захвата предыдущей одной ножки 200 в исходном состоянии) в остаточном (недостающем) количестве. Таким образом, вышеописанный переход к следующим ножкам 200 в каждом из взаимодействующих между собой самоходных модулях 500, показанных на фиг. 5, иллюстрирует принцип последовательного или поочередного взаимодействия по меньшей мере одной из ножек 200, которыми снабжен корпус 100 в одном из указанных самоходных модулей 500, за раз (т.е. за каждый цикл взаимодействия ножек 200) по меньшей мере с одной другой ножкой из ножек 200, которыми снабжен корпус 100 в другом из указанных самоходных модулей 500.
Согласно одному из вариантов реализации настоящего изобретения, в котором ножки 200, которыми снабжены корпуса 100 во взаимодействующих между собой самоходных модулях 500, показанных на фиг. 5, при взаимодействии друг с другом находятся каждая в своем рабочем состоянии, другие ножки 200, которые также относятся к указанным взаимодействующим между собой самоходным модулям 500 и которые должны следующими войти во взаимодействие друг с другом для продолжения перемещения указанных самоходных модулей 500 относительно друг друга, могут полностью или частично принимать каждая второе наклонное состояние (т.е. рабочее состояние) или промежуточное состояние, близкое к указанному второму наклонному состоянию, в процессе взаимодействия между собой предыдущих ножек 200, относящихся к указанным взаимодействующим между собой самоходным модулям 500. Согласно еще одному варианту реализации настоящего изобретения, в котором ножки 200, которыми снабжены корпуса 100 во взаимодействующих между собой самоходных модулях 500, показанных на фиг. 5, при взаимодействии друг с другом находятся каждая в своем рабочем состоянии, другие ножки 200, которые также относятся к указанным взаимодействующим между собой самоходным модулям 500 и которые должны следующими войти во взаимодействие друг с другом для продолжения перемещения указанных самоходных модулей 500 относительно друг друга, могут полностью или частично принять каждая второе наклонное состояние (т.е. свое рабочее состояние) или промежуточное состояние, близкое к указанному второму наклонному состоянию, еще перед входом предыдущих ножек 200, относящихся к указанным взаимодействующим между собой самоходным модулям 500, во взаимодействие друг с другом или уже после выхода указанных предыдущих ножек 200 из взаимодействия друг с другом под управлением управляющих устройств, относящихся к указанным взаимодействующим между собой самоходным модулям 500.
Согласно другому варианту реализации настоящего изобретения, одновременно или по существу одновременно каждая из двух или более ножек 200 во втором наклонном состоянии (т.е. в рабочем состоянии), которыми снабжен корпус 100 в одном из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 5 в составе самоходной системы 1000, может входить во взаимодействие с соответствующей одной из двух или более ножек 200 во втором наклонном состоянии (т.е. рабочем состоянии) или первом наклонном состоянии (т.е. исходном состоянии), которыми снабжен корпус 100 в другом из указанных взаимодействующих между собой самоходных модулей 500, с обеспечением возможности поворотного перемещения указанных самоходных модулей 500 друг относительно друга (например, возможности перемещения корпуса 100, относящегося к одному из взаимодействующих между собой самоходных модулей 500, по корпусу 100, относящемуся к другому из указанных взаимодействующих между собой самоходных модулей 500).
Следует отметить, что для выхода самоходных модулей 500, показанных на фиг. 5 в составе самоходной системы 1000, из взаимодействия друг с другом ножки 200 в рабочем состоянии из числа взаимодействующих между собой ножек 200, относящихся к указанным самоходным модулям 500, переходят из второго наклонного состояния (т.е. рабочего состояния) обратно в первое наклонное состояние (т.е. исходное состояние) под управлением управляющего устройства самоходного модуля 500, к которому относятся указанные ножки 200 в рабочем состоянии, так что ножки 200 в каждом из вышедших из взаимодействия друг с другом самоходных модулей 200 находятся каждая в первом наклонном состоянии (т.е. исходном состоянии). После выхода самоходных модулей 500, показанных на фиг. 5, из взаимодействия друг с другом управляющее устройство в каждом из указанных самоходных модулей 500 может обеспечить возможность выполнения по меньшей мере одной из следующих операций: (i) перемещение самоходного модуля 500 по поверхности перемещения (например, по поверхности земли, по асфальту, по дороге или т.п.) путем последовательного или поочередного изменения каждый раз состояния одной или более из ножек 200, которыми снабжен корпус 100 в указанном самоходном модуле 500, с первого наклонного состояния (т.е. исходного состояния) на второе наклонное состояние (т.е. рабочее состояние) и наоборот с обеспечением возможности взаимодействия каждой из указанных одной или более ножек 200 с указанной поверхностью перемещения в течение указанного цикла взаимодействия указанного самоходного модуля 500 с указанной поверхностью перемещения; (ii) ввод самоходного модуля 500 во взаимодействие с другим самоходным модулем 500 (в том числе снова с самоходным модулем 500, из взаимодействия с которым он только что вышел или из взаимодействия с которым он вышел какое-то время назад) путем последовательного или поочередного изменения состояния за раз (т.е. за каждый цикл взаимодействия ножек 200 между собой) одной или более из ножек 200, которыми снабжен корпус 100 в указанном самоходном модуле 500, с первого наклонного состояния (т.е. исходного состояния) на второе наклонное состояние (т.е. рабочее состояние) и наоборот с обеспечением возможности взаимодействия каждой из указанных ножек 200 в рабочем состоянии (т.е. в состоянии, измененном на рабочее состояние) с одной или более из ножек 200 в первом наклонном состоянии (т.е. исходном состоянии) или втором наклонном состоянии (т.е. рабочем состоянии), которыми снабжен корпус 100 в указанном другом самоходном модуле 500, в течение каждого цикла взаимодействия друг с другом ножек 200, относящихся к указанным взаимодействующим между собой самоходным модулям 500.
На фиг. 6 показан еще один иллюстративный вариант реализации самоходного модуля 500 согласно настоящему изобретению, при этом фиг.6 также наглядно иллюстрирует еще один пример процесса взаимодействия самоходных модулей 500 друг с другом. Следует отметить, что каждый из самоходных модулей 500, показанных на фиг. 6, является альтернативной реализацией любого из самоходных модулей 500, описанных выше со ссылкой на фиг. 5, в связи с чем приведенное выше описание конструктивных и функциональных особенностей самоходных модулей 500, связанное с использованием механизма наклона ножки для изменения пространственного положения ножки и переходом ножек между первым и вторым наклонными состояниями, не дублируется ниже в отношении указанных самоходных модулей 500, показанных на фиг. 6, для улучшения читабельности настоящего документа.
Как показано на фиг. 6, при взаимодействии друг с другом ножки 200, относящиеся к взаимодействующим между собой самоходным модулям 500, находятся в разных состояниях. В частности, одна ножка 200, которой снабжен корпус 100 в одном из указанных самоходных модулей 500, показанных на фиг. 6, находится в своем исходном состоянии (т.е. отходит от корпуса 100 под предварительно заданным углом к нему), а две ножки 200, которыми снабжен корпус 100 в другом из указанных самоходных модулей 500, находятся в своих рабочих состояниях, в которых они взаимодействуют каждая с указанной одной ножкой 200 в исходном состоянии с обеспечением ее зажатия или сжатия с двух разных сторон и, следовательно, ее захвата, при этом в течение периода указанного взаимодействия другие ножки 200 в указанных взаимодействующих между собой самоходных модулях 500, которые должны следующими войти во взаимодействие друг с другом, находятся в своих исходных состояниях. Таким образом, для взаимодействия самоходных модулей 500, показанных на фиг. 6, друг с другом захватываемая ножка 200, относящаяся к одному из указанных взаимодействующих между собой самоходных модулей 500, может сохранять свое исходное состояние, а захватывающие ножки 200, относящиеся к другому из указанных взаимодействующих между собой самоходных модулей 500, должны быть переведены из своих исходных состояний в свои рабочие состояния (т.е. каждая из них должна быть отклонена с обеспечением размещения каждой наклоненной ножки 200 под своим заданным углом к корпусу 100, на котором они установлены) под управлением управляющих устройств указанных взаимодействующих между собой самоходных модулей 500, что позволит осуществить перемещение указанных взаимодействующих между собой самоходных модулей 500 друг относительно друга.
Кроме того, как показано на фиг. 6, каждая из ножек 200, относящихся к взаимодействующим между собой самоходным модулям 500, снабжена утолщением или выпуклостью, при этом длина указанных ножек 200, место выполнения выпуклостей на указанных ножках 200 и размеры выпуклостей ножек 200 предварительно подобраны таким образом, что при вышеописанном захвате одной из ножек 200, которыми снабжен корпус 100 в одном из указанных взаимодействующих между собой самоходных модулей 500, выпуклость указанной захваченной ножки 200 с двух своих противоположных сторон плотно контактирует с ножками 200, которыми снабжен корпус 100 в другом из указанных взаимодействующих между собой самоходных модулей 500 и которые использованы для захвата указанной захваченной ножки 200, при этом указанная захваченная ножка 200 может плотно контактировать по меньшей мере с одной из выпуклостей указанных захватывающих ножек 200.
На фиг. 7 показан еще один иллюстративный вариант реализации самоходного модуля 500 согласно настоящему изобретению, при этом фиг. 7 также наглядно иллюстрирует еще один пример процесса взаимодействия самоходных модулей 500 друг с другом. Следует отметить, что каждый из самоходных модулей 500, показанных на фиг. 7, является альтернативной реализацией любого из самоходных модулей 500, описанных выше со ссылкой на фиг. 5, в связи с чем приведенное выше описание конструктивных и функциональных особенностей самоходных модулей 500, связанное с использованием механизма наклона ножки для изменения пространственного положения ножки и переходом ножек между первым и вторым наклонными состояниями, не дублируется ниже в отношении указанных самоходных модулей 500, показанных на фиг. 7, для улучшения читабельности настоящего документа.
Как показано на фиг. 7, при взаимодействии друг с другом ножки 200, относящиеся к взаимодействующим между собой самоходным модулям 500, находятся в разных состояниях. В частности, захватываемая ножка 200-3, которой снабжен корпус 100 в одном из указанных самоходных модулей 500, показанных на фиг. 7, находится в своем исходном состоянии (т.е. отходит от корпуса 100 или наклонена к указанному корпусу 100 под предварительно заданным углом), при этом ножка 200-2 из двух захватывающих ножек 200, которыми снабжен корпус 100 в другом из указанных самоходных модулей 500 и которые захватывают указанную одну ножку 200-3 в исходном состоянии путем ее зажатия или сжатия с двух разных сторон, находится в своем исходном состоянии (т.е. отходит от корпуса 100 или наклонена к указанному корпусу 100 под предварительно заданным углом), а ножка 200-1 из указанных захватывающих ножек 200 находится в своем рабочем состоянии (т.е. отклонена на заданный угол по отношению к своему исходному пространственному положению, соответствующему исходному состоянию ножки 200).
Как показано на фиг. 7, в течение периода взаимодействия ножек 200-1, 200-2, 200-3 друг с другом во взаимодействующих между собой самоходных модулях 500 другие ножки 200 в указанных взаимодействующих между собой самоходных модулях 500, которые должны следующими войти во взаимодействие друг с другом, находятся в своих исходных состояниях. Таким образом, для взаимодействия самоходных модулей 500, показанных на фиг. 7, друг с другом захватываемая ножка 200-3, относящаяся к одному из указанных взаимодействующих между собой самоходных модулей 500, и одна из захватывающих ножек 200-1, 200-2, относящихся к другому из указанных взаимодействующих между собой самоходных модулей 500, могут сохранять каждая свое исходное состояние, а другая из указанных захватывающих ножек 200-1, 200-2 должна быть переведена из своего исходного состояния в свое рабочее состояние (т.е. должна быть отклонена с обеспечением ее размещения под своим заданным углом к корпусу 100, на котором она установлена, при этом указанный измененный угол наклона должен отличаться от исходного угла наклона, под которым эта ножка 200 расположена в своем исходном состоянии по отношению к указанному корпусу 100) под управлением управляющих устройств указанных взаимодействующих между собой самоходных модулей 500, что позволит осуществить перемещение указанных взаимодействующих между собой самоходных модулей 500 друг относительно друга.
На фиг. 8 показан еще один иллюстративный вариант реализации самоходного модуля 500 согласно настоящему изобретению, при этом фиг.8 также наглядно иллюстрирует еще один пример процесса взаимодействия самоходных модулей 500 друг с другом. Следует отметить, что каждый из самоходных модулей 500, показанных на фиг. 8, является альтернативной реализацией любого из самоходных модулей 500, описанных выше со ссылкой на фиг. 5, в связи с чем приведенное выше описание конструктивных и функциональных особенностей самоходных модулей 500, связанное с использованием механизма наклона ножки для изменения пространственного положения ножки и переходом ножек между первым и вторым наклонными состояниями, не дублируется ниже в отношении указанных самоходных модулей 500, показанных на фиг. 8, для улучшения читабельности настоящего документа.
Как показано на фиг. 8, при взаимодействии друг с другом ножки 200, относящиеся к взаимодействующим между собой самоходным модулям 500, находятся в разных состояниях. В частности, захватываемая ножка 200-3, которой снабжен корпус 100 в одном из указанных самоходных модулей 500, показанных на фиг. 8, находится в своем исходном состоянии (т.е. отходит от корпуса 100 или наклонена к указанному корпусу 100 под предварительно заданным углом), при этом захватывающие ножки 200-1, 200-2, которыми снабжен корпус 100 в другом из указанных самоходных модулей 500 и которые захватывают указанную одну ножку 200-3 в исходном состоянии путем ее зажатия или сжатия с двух разных сторон, находятся в своих рабочих состояниях (т.е. отклонены каждая на заданный угол по отношению к своему исходному пространственному положению, соответствующему исходному состоянию).
Как показано на фиг. 8, в течение периода взаимодействия ножек 200-1, 200-2, 200-3 друг с другом во взаимодействующих между собой самоходных модулях 500, показанных на фиг. 8, другие ножки 200 в указанных взаимодействующих между собой самоходных модулях 500, которые должны следующими войти во взаимодействие друг с другом, находятся в своих исходных состояниях (т.е. отходят каждая от корпуса 100 или наклонены каждая к указанному корпусу 100 под своим предварительно заданным углом). Таким образом, для взаимодействия самоходных модулей 500, показанных на фиг. 8, друг с другом захватываемая ножка 200-3, относящаяся к одному из указанных взаимодействующих между собой самоходных модулей 500, может сохранять свое исходное состояние, а захватывающие ножки 200-1, 200-2, относящиеся к другому из указанных взаимодействующих между собой самоходных модулей 500, должны быть переведены обе из своих исходных состояний в свои рабочие состояния (т.е. должны быть отклонены с обеспечением размещения каждой из них под своим заданным углом к корпусу 100, на котором они установлены, при этом указанный измененный угол наклона указанной ножки 200-1/200-2 должен отличаться от исходного угла наклона, под которым эта ножка 200-1/200-2 расположена в своем исходном состоянии по отношению к указанному корпусу 100) под управлением управляющих устройств указанных взаимодействующих между собой самоходных модулей 500, что позволит осуществить перемещение указанных взаимодействующих между собой самоходных модулей 500 друг относительно друга.
На фиг. 9 показан еще один иллюстративный вариант реализации самоходного модуля 500 согласно настоящему изобретению, при этом фиг. 9 также наглядно иллюстрирует еще один пример процесса взаимодействия самоходных модулей 500 друг с другом. Следует отметить, что каждый из самоходных модулей 500, показанных на фиг. 9, является альтернативной реализацией любого из самоходных модулей 500, описанных выше со ссылкой на фиг. 5, в связи с чем приведенное выше описание конструктивных и функциональных особенностей самоходных модулей 500, связанное с использованием механизма наклона ножки для изменения пространственного положения ножки и переходом ножек между первым и вторым наклонными состояниями, не дублируется ниже в отношении указанных самоходных модулей 500, показанных на фиг. 9, для улучшения читабельности настоящего документа.
Как показано на фиг. 9, при взаимодействии друг с другом ножки 200, относящиеся к взаимодействующим между собой самоходным модулям 500, находятся в одинаковых или схожих состояниях, то есть в своих рабочих состояниях или в состояниях, приближенных к их рабочим состояниям, при этом во время (в течение) каждого цикла взаимодействия ножек 200 в одном из указанных взаимодействующих между собой самоходных модулей 500, показанных на фиг. 9, оказываются задействованными две ножки 200, каждая из которых выполняет функцию захватывающей ножки, и одновременно в другом из указанных взаимодействующих между собой самоходных модулей 500 оказывается задействованной только одна ножка 200, которая выполняет функцию захватываемой ножки.
В частности, ножка 200-3, которой снабжен корпус 100 в одном из указанных самоходных модулей 500, показанных на фиг. 9, находится в рабочем состоянии (т.е. отклонена на заданный угол по отношению к своему исходному пространственному положению, соответствующему исходному состоянию этой ножки 200-3), а ножки 200-1, 200-2, которыми снабжен корпус 100 в другом из указанных самоходных модулей 500 и которые находятся в своих рабочих состояниях (т.е. каждая из ножек 200-1, 200-2 отклонена на заданный угол по отношению к своему исходному пространственному положению, соответствующему ее исходному состоянию), захватывают указанную одну ножку 200-3 в рабочем состоянии путем ее сжатия с двух разных сторон посредством указанных ножек 200-1, 200-2 или ее зажатия между указанными ножками 200-1, 200-2.
Таким образом, для взаимодействия самоходных модулей 500, показанных на фиг. 9, друг с другом ножка 200-3, относящаяся к одному из указанных взаимодействующих между собой самоходных модулей 500, должна быть переведена из своего исходного состояния (т.е. из состояния, в котором она отходит от корпуса 100, на котором она установлена, или наклонена к указанному корпусу 100 под своим предварительно заданным углом) в свое рабочее состояние, и одновременно ножки 200-1, 200-2, относящиеся к другому из указанных взаимодействующих между собой самоходных модулей 500, должны быть переведены обе из своих исходных состояний (т.е. состояний, в которых каждая из ножек 200-1, 200-2 отходит от корпуса 100, на котором она установлена, или наклонена к указанному корпусу 100 под своим предварительно заданным углом) в свои рабочие состояния (т.е. ножки 200-1, 200-2 должны быть отклонены с обеспечением размещения каждой из них под своим заданным углом к корпусу 100, на котором они установлены, при этом указанный измененный угол наклона ножки должен отличаться от исходного угла наклона, под которым эта ножка расположена в своем исходном состоянии по отношению к указанному корпусу 100) с обеспечением сжатия ножки 200-3 с двух сторон посредством ножек 200-1, 200-2 или зажатия ножки 200-3 между ножками 200-1, 200-2 под управлением управляющих устройств указанных взаимодействующих между собой самоходных модулей 500, что позволит осуществить перемещение указанных взаимодействующих между собой самоходных модулей 500 друг относительно друга.
Кроме того, как показано на фиг. 9, в течение периода взаимодействия ножек 200-1, 200-2, 200-3 друг с другом во взаимодействующих между собой самоходных модулях 500, показанных на фиг. 9, другие ножки 200 (в частности, ножки 200-4, 200-5, 200-6) в указанных взаимодействующих между собой самоходных модулях 500, которые должны быть задействованы в следующем цикле взаимодействия ножек 200 в указанных взаимодействующих между собой самоходных модулях 500, уже находятся в своих рабочих состояниях (т.е. отходят каждая от корпуса 100 или наклонены каждая к указанному корпусу 100 под своим предварительно заданным углом) или в состояниях, близких к их рабочим состояниям.
В частности, при завершении первого цикла взаимодействия самоходных модулей 500 между собой, в котором задействованы вышеописанные ножка 200-3 и ножки 200-1, 200-2, которые оказываются задействованными для захвата захватываемой ножки 200-3, ножка 200-1 выходит из взаимодействия с ножкой 200-3 путем перевода ножки 200-1 из ее рабочего состояния в ее исходное состояние и одновременно с этим другая ножка 200-4, которая вместе с ножкой 200-1 установлена на одном и том же корпусе 100 в одном из взаимодействующих между собой самоходных модулей 500, показанных на фиг.9, входит во взаимодействие с ножкой 200-2, которая вместе с вышедшей из взаимодействия ножкой 200-1 установлена на одном и том же корпусе 100 в другом из указанных взаимодействующих между собой самоходных модулей 500, с обеспечением прижатия этой ножки 200-2 к ножке 200-3, так что ножка 200-2 становится захватываемой, а ножки 200-3, 200-4 становятся захватывающими. Далее, при завершении второго цикла взаимодействия самоходных модулей 500 между собой, в котором оказываются задействованными вышеописанные ножка 200-2, выполняющая функцию захватываемой ножки, и ножки 200-3, 200-4, выполняющие функцию захватывающих ножек для сжатия с двух сторон захватываемой ножки 200-2, уже ножка 200-3 выходит из взаимодействия с ножкой 200-2 путем перевода ножки 200-3 из ее рабочего состояния в ее исходное состояние и одновременно с этим другая ножка 200-5, которая вместе с ножками 200-1, 200-2 установлена на одном и том же корпусе 100 в одном из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 9, входит во взаимодействие с ножкой 200-4, которая вместе с вышедшей из взаимодействия ножкой 200-3 установлена на одном и том же корпусе 100 в другом из указанных взаимодействующих между собой самоходных модулей 500, с обеспечением прижатия этой ножки 200-4 к ножке 200-2, так что ножка 200-4 становится захватываемой, а ножки 200-2, 200-5 становятся захватывающими. Следует отметить, что для продолжения перемещения самоходных модулей 500, показанных на фиг. 9, относительно друг друга вышеописанный процесс изменения состояний взаимодействующих между собой ножек 200 может быть последовательно продолжен аналогичным образом.
На фиг. 10 показан еще один иллюстративный вариант реализации самоходного модуля 500 согласно настоящему изобретению, при этом фиг. 10 также наглядно иллюстрирует еще один пример процесса взаимодействия самоходных модулей 500 друг с другом. Следует отметить, что каждый из самоходных модулей 500, показанных на фиг. 10, является альтернативной реализацией любого из самоходных модулей 500, описанных выше со ссылкой на фиг. 5, в связи с чем приведенное выше описание конструктивных и функциональных особенностей самоходных модулей 500, связанное с использованием механизма наклона ножки для изменения пространственного положения ножки и переходом ножек между первым и вторым наклонными состояниями, не дублируется ниже в отношении указанных самоходных модулей 500, показанных на фиг. 10, для улучшения читабельности настоящего документа.
Как показано на фиг. 10, при взаимодействии друг с другом ножки 200, относящиеся к взаимодействующим между собой самоходным модулям 500, показанных на фиг. 10, находятся в одинаковых или схожих состояниях, то есть в своих рабочих состояниях или в состояниях, приближенных к их рабочим состояниям, при этом во время каждого цикла взаимодействия ножек 200 в каждом из указанных взаимодействующих между собой самоходных модулей 500, показанных на фиг. 10, оказываются одновременно задействованными по две ножки 200, каждая из которых выполняет функцию захватывающей ножки, и по одной ножке 200, которая выполняет функцию захватываемой ножки.
В частности, захватывающие ножки 200-1, 200-2, которыми снабжен корпус 100 в одном из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 10 и которые находятся в своих рабочих состояниях (т.е. каждая из ножек 200-1, 200-2 отклонена на заданный угол по отношению к своему исходному пространственному положению, соответствующему ее исходному состоянию), захватывают одну захватываемую ножку 200-3 в ее рабочем состоянии (т.е. в состоянии, в котором эта ножка 200-3 отклонена на заданный угол по отношению к своему исходному пространственному положению, соответствующему ее исходному состоянию), которой снабжен корпус 100 в другом из указанных взаимодействующих между собой самоходных модулей 500, путем сжатия указанной ножки 200-3 с двух разных сторон посредством захватывающих ножек 200-1, 200-2 или зажатия указанной ножки 200-3 между указанными захватывающими ножками 200-1, 200-2, и одновременно захватываемая ножка 200-6, которая вместе с захватывающими ножками 200-1, 200-2 относится к одному и тому же самоходному модулю 500 и которая находится в своем рабочем состоянии (т.е. отклонена на заданный угол по отношению к своему исходному пространственному положению, соответствующему ее исходному состоянию), захвачена захватывающими ножками 200-4, 200-5, которые относятся к указанному другому самоходному модулю и которые находятся в своих рабочих состояниях (т.е. каждая из ножек 200-4, 200-5 находится в состоянии, в котором она отклонена на заданный угол по отношению к своему исходному пространственному положению, соответствующему ее исходному состоянию), путем сжатия с двух сторон указанной захватываемой ножки 200-6 посредством указанных захватывающих ножек 200-4, 200-5 или зажатия указанной захватываемой ножки 200-6 между указанными захватывающими ножками 200-4, 200-5.
Как показано на фиг. 10, во время (в течение) периода взаимодействия ножек 200-1, 200-2, 200-3, 200-4, 200-5, 200-6 друг с другом во взаимодействующих между собой самоходных модулях 500, показанных на фиг. 10, другие ножки 200 в указанных взаимодействующих между собой самоходных модулях 500, которые должны следующими войти во взаимодействие друг с другом, находятся в своих исходных состояниях (т.е. отходят каждая от корпуса 100 или наклонены каждая к указанному корпусу 100 под своим предварительно заданным углом).
Таким образом, для взаимодействия самоходных модулей 500, показанных на фиг. 10, друг с другом под управлением управляющих устройств указанных взаимодействующих между собой самоходных модулей 500 должны быть одновременно или по существу одновременно осуществлены по меньшей мере две следующие операции во время каждого цикла взаимодействия: (1) захватывающие ножки 200-1, 200-2, относящиеся к одному из указанных взаимодействующих между собой самоходных модулей 500, должны быть переведены из своих исходных состояний в свои рабочие состояния, и захватываемая ножка 200-3, относящаяся к другому из указанных взаимодействующих между собой самоходных модулей 500, должна быть переведена из своего исходного состояния в свое рабочее состояние с обеспечением ее сжатия с двух сторон посредством указанных захватывающих ножек 200-1, 200-2 в их рабочих состояниях или ее зажатия между указанными захватывающими ножками 200-1, 200-2 в их рабочих состояниях; и (2) захватываемая ножка 200-6, относящаяся вместе с захватывающими ножками 200-1, 200-2 к одному и тому же самоходному модулю 500, должна быть переведена из своего исходного состояния в свое рабочее состояние, и захватывающие ножки 200-4, 200-5, относящиеся к указанному другому самоходному модулю 500, должны быть переведены из своих исходных состояний в свои рабочие состояния с обеспечением сжатия указанной захватываемой ножки 200-6 с двух сторон или зажатия указанной захватываемой ножки 200-6 между указанными захватывающими ножками 200-1, 200-2, что позволит осуществить перемещение указанных взаимодействующих между собой самоходных модулей 500 друг относительно друга.
На фиг. 11 показан еще один иллюстративный вариант реализации самоходного модуля 500 согласно настоящему изобретению, при этом фиг. 11 также наглядно иллюстрирует еще один пример процесса взаимодействия самоходных модулей 500 друг с другом. Следует отметить, что каждый из самоходных модулей 500, показанных на фиг. 11, является альтернативной реализацией любого из самоходных модулей 500, описанных выше со ссылкой на фиг. 5, в связи с чем приведенное выше описание конструктивных и функциональных особенностей самоходных модулей 500, связанное с использованием механизма наклона ножки для изменения пространственного положения ножки и переходом ножек между первым и вторым наклонными состояниями, не дублируется ниже в отношении указанных самоходных модулей 500, показанных на фиг. 11, для улучшения читабельности настоящего документа.
Как показано на фиг. 11, при взаимодействии друг с другом ножки 200, относящиеся к взаимодействующим между собой самоходным модулям 500, показанным на фиг. 11, находятся в одинаковых или схожих состояниях, то есть в своих рабочих состояниях или в состояниях, приближенных к их рабочим состояниям, при этом во время каждого цикла взаимодействия ножек 200 в каждом из указанных взаимодействующих между собой самоходных модулей 500, показанных на фиг. 11, оказываются одновременно задействованными по две ножки 200, каждая из которых выполняет функцию захватывающей ножки и одна из которых выполняет функцию захватываемой ножки в течение каждого цикла взаимодействия ножек 200. В частности, ножки 200-1, 200-2, которыми снабжен корпус 100 в одном из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 11, и которые находятся в своих рабочих состояниях (т.е. каждая из ножек 200-1, 200-2 отклонена на заданный угол по отношению к своему исходному пространственному положению, соответствующему ее исходному состоянию), захватывают одну ножку 200-3 в ее рабочем состоянии (т.е. в состоянии, в котором эта ножка 200-3 отклонена на заданный угол по отношению к своему исходному пространственному положению, соответствующему ее исходному состоянию), которой снабжен корпус 100 в другом из указанных взаимодействующих между собой самоходных модулей 500, путем сжатия указанной ножки 200-3 с двух разных сторон посредством ножек 200-1, 200-2 или зажатия указанной ножки 200-3 между указанными ножками 200-1, 200-2, и одновременно ножка 200-3 и ножка 200-4, относящиеся к указанному другому самоходному модулю 500 и находящиеся в своих рабочих состояниях (т.е. в состояниях, в которых каждая из них отклонена на заданный угол по отношению к своему исходному пространственному положению, соответствующему ее исходному состоянию), захватывают ножку 200-2 в ее рабочем состоянии (т.е. в состоянии, в котором она отклонена на заданный угол по отношению к своему исходному пространственному положению, соответствующему ее исходному состоянию), относящуюся вместе с ножкой 200-1 к одному и тому же самоходному модулю 500, путем сжатия указанной ножки 200-2 с двух сторон между указанными ножками 200-3, 200-4 или зажатия указанной ножки 200-2 между указанными ножками 200-3, 200-4. Таким образом, во взаимодействующих между собой самоходных модулях 500, показанных на фиг. 11, ножки 200-2, 200-3 выполняют каждая одновременно функцию захватывающей ножки и захватываемой ножки.
Как показано на фиг. 11, в течение периода взаимодействия ножек 200-1, 200-2, 200-3, 200-4 друг с другом во взаимодействующих между собой самоходных модулях 500, показанных на фиг. 11, другие ножки 200 в указанных взаимодействующих между собой самоходных модулях 500, которые должны следующими войти во взаимодействие друг с другом, находятся в своих исходных состояниях (т.е. отходят каждая от корпуса 100 или наклонены каждая к указанному корпусу 100 под своим предварительно заданным углом).
Таким образом, для взаимодействия самоходных модулей 500, показанных на фиг. 11, друг с другом под управлением управляющих устройств указанных взаимодействующих между собой самоходных модулей 500 должны быть одновременно или по существу одновременно осуществлены по меньшей мере две следующие операции во время каждого цикла взаимодействия: (1) ножки 200-1, 200-2, относящиеся к одному из указанных взаимодействующих между собой самоходных модулей 500, должны быть переведены из своих исходных состояний в свои рабочие состояния, и ножка 200-3, относящаяся к другому из указанных взаимодействующих между собой самоходных модулей 500, должна быть переведена из своего исходного состояния в свое рабочее состояние с обеспечением ее сжатия с двух сторон посредством указанных ножек 200-1, 200-2 в их рабочих состояниях или ее зажатия между указанными захватывающими ножками 200-1, 200-2 в их рабочих состояниях; и (2) ножка 200-4, относящаяся к указанному другому самоходному модулю 500, должна быть переведена из своего исходного состояния в свое рабочее состояние с обеспечением сжатия ножки 200-2, относящейся вместе с ножкой 200-1 к одному и тому же самоходному модулю 500, с двух сторон посредством ножек 200-3, 200-4 в их рабочих состояниях или зажатия ножки 200-2 между указанными ножками 200-3, 200-4 в их рабочих состояниях, что позволит осуществить перемещение указанных взаимодействующих между собой самоходных модулей 500 друг относительно друга.
На фиг. 12 показан еще один иллюстративный вариант реализации самоходного модуля 500 согласно настоящему изобретению, при этом фиг. 12 также наглядно иллюстрирует еще один пример процесса взаимодействия самоходных модулей 500 друг с другом. Следует отметить, что каждый из самоходных модулей 500, показанных на фиг. 12, является альтернативной реализацией любого из самоходных модулей 500, описанных выше со ссылкой на фиг. 5, в связи с чем приведенное выше описание конструктивных и функциональных особенностей самоходных модулей 500, связанное с использованием механизма наклона ножки для изменения пространственного положения ножки и переходом ножек между первым и вторым наклонными состояниями, не дублируется ниже в отношении указанных самоходных модулей 500, показанных на фиг. 12, для улучшения читабельности настоящего документа.
Как показано на фиг. 12, при взаимодействии друг с другом ножки 200, относящиеся к взаимодействующим между собой самоходным модулям 500, показанных на фиг. 12, находятся в одинаковых или схожих состояниях, то есть в своих рабочих состояниях или в состояниях, приближенных к их рабочим состояниям, при этом во время (в течение) каждого цикла взаимодействия ножек 200 в одном из указанных взаимодействующих между собой самоходных модулей 500, показанных на фиг. 11, оказываются задействованными две ножки 200, каждая из которых выполняет функцию захватываемой ножки и одна из которых выполняет функцию захватывающей ножки в течение каждого цикла взаимодействия ножек 200, и одновременно в другом из указанных взаимодействующих между собой самоходных модулей 500 оказываются задействованными три ножки 200, каждая из которых выполняет функцию захватывающей ножки и одна из которых выполняет функцию захватываемой ножки.
В частности, ножки 200-1, 200-2, которыми снабжен корпус 100 в одном из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 12, и которые находятся в своих рабочих состояниях (т.е. каждая из ножек 200-1, 200-2 отклонена на заданный угол по отношению к своему исходному пространственному положению, соответствующему ее исходному состоянию), захватывают одну ножку 200-3 в ее рабочем состоянии (т.е. в состоянии, в котором эта ножка 200-3 отклонена на заданный угол по отношению к своему исходному пространственному положению, соответствующему ее исходному состоянию), которой снабжен корпус 100 в другом из указанных взаимодействующих между собой самоходных модулей 500, путем сжатия указанной ножки 200-3 с двух разных сторон посредством ножек 200-1, 200-2 или зажатия указанной ножки 200-3 между указанными ножками 200-1, 200-2, и одновременно ножка 200-3 и ножка 200-4, относящиеся к указанному другому самоходному модулю 500 и находящиеся в своих рабочих состояниях (т.е. в состояниях, в которых каждая из них отклонена на заданный угол по отношению к своему исходному пространственному положению, соответствующему ее исходному состоянию), захватывают ножку 200-2 в ее рабочем состоянии (т.е. в состоянии, в котором она отклонена на заданный угол по отношению к своему исходному пространственному положению, соответствующему ее исходному состоянию), относящуюся вместе с ножкой 200-1 к одному и тому же самоходному модулю 500, путем сжатия указанной ножки 200-2 с двух сторон между указанными ножками 200-3, 200-4 или зажатия указанной ножки 200-2 между указанными ножками 200-3, 200-4, и одновременно ножка 200-2 и ножка 200-5, которые вместе с ножкой 200-1 относятся к одному и тому же самоходному модулю 500, в своих рабочих состояниях захватывают одну ножку 200-4 в ее рабочем состоянии путем сжатия указанной ножки 200-4 с двух сторон между указанными ножками 200-2, 200-5 или зажатия указанной ножки 200-4 между указанными ножками 200-2, 200-5. Таким образом, во взаимодействующих между собой самоходных модулях 500, показанных на фиг. 12, ножки 200-2, 200-3, 200-4 выполняют каждая одновременно функцию захватывающей ножки и захватываемой ножки, а ножки 200-1, 200-5 выполняют каждая только функцию захватывающей ножки.
Как показано на фиг. 12, в течение периода взаимодействия ножек 200-1, 200-2, 200-3, 200-4, 200-5 друг с другом во взаимодействующих между собой самоходных модулях 500, показанных на фиг. 12, другие ножки 200 в указанных взаимодействующих между собой самоходных модулях 500, которые должны следующими войти во взаимодействие друг с другом, находятся в своих исходных состояниях (т.е. отходят каждая от корпуса 100 или наклонены каждая к указанному корпусу 100 под своим предварительно заданным углом).
Таким образом, для взаимодействия самоходных модулей 500, показанных на фиг. 12, друг с другом под управлением управляющих устройств указанных взаимодействующих между собой самоходных модулей 500 должны быть одновременно или по существу одновременно осуществлены по меньшей мере три следующие операции во время каждого цикла взаимодействия: (1) ножки 200-1, 200-2, относящиеся к одному из указанных взаимодействующих между собой самоходных модулей 500, должны быть переведены из своих исходных состояний в свои рабочие состояния, и ножка 200-3, относящаяся к другому из указанных взаимодействующих между собой самоходных модулей 500, должна быть переведена из своего исходного состояния в свое рабочее состояние с обеспечением ее сжатия с двух сторон посредством указанных ножек 200-1, 200-2 в их рабочих состояниях или ее зажатия между указанными захватывающими ножками 200-1, 200-2 в их рабочих состояниях; (2) ножка 200-4, относящаяся к указанному другому самоходному модулю 500, должна быть переведена из своего исходного состояния в свое рабочее состояние с обеспечением сжатия ножки 200-2, относящейся вместе с ножкой 200-1 к одному и тому же самоходному модулю 500, с двух сторон посредством ножек 200-3, 200-4 в их рабочих состояниях или зажатия ножки 200-2 между указанными ножками 200-3, 200-4 в их рабочих состояниях; и (3) ножка 200-5, относящаяся вместе ножками 200-1, 200-2 к одному и тому же самоходному модулю 500, должна быть переведена из своего исходного состояния в свое рабочее состояние с обеспечением сжатия ножки 200-4, относящейся к указанному другому самоходному модулю 500, с двух сторон посредством ножек 200-2, 200-5 в их рабочих состояниях или зажатия ножки 200-4 между указанными ножками 200-2, 200-5 в их рабочих состояниях, что позволит осуществить перемещение указанных взаимодействующих между собой самоходных модулей 500 друг относительно друга.
На фиг. 13а-13е показан еще один иллюстративный вариант реализации самоходного модуля 500 согласно настоящему изобретению, при этом фиг. 13а-13е также наглядно иллюстрирует еще один пример процесса взаимодействия двух самоходных модулей 500 друг с другом с использованием семнадцати (17) промежуточных состояний В1-В17 указанных взаимодействующих между собой самоходных модулей 500.
Возможен вариант осуществления, в котором корпус 100 самоходного модуля 500 содержит внешний шарообразный или сферический корпус 100 и внутренний шарообразный или сферический корпус 150, установленный внутри внешнего корпуса 100, ножки 200 соединены с внутренним корпусом 150 и проходят через внешний корпус 100, при этом управляющее устройство, соединенное по меньшей мере с одной из указанных ножек 200 выполнено с возможностью управляемого изменения ее пространственной ориентации по отношению к указанному корпусу в области поверхности внутреннего корпуса 150 и/или в области поверхности внешнего корпуса 100.
Возможен вариант осуществления, в котором внутренний 150 и/или внешний корпус 100 выполнен из эластичного материала, обеспечивающего возможность изменения формы внутреннего 150 и/или внешнего корпуса 100 при перемещении самоходного модуля соответственно.
Следует отметить, что каждый из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 13а-13е, содержит внешний шарообразный или сферический корпус 100 и внутренний шарообразный или сферический корпус 150, установленный (закрепленный, зафиксированный или размещенный) внутри внешнего корпуса 100, при этом внутри внутреннего корпуса 150 могут быть размещены или установлены аккумуляторная батарея самоходного модуля 500, управляющее устройство самоходного модуля 500, генератор тока самоходного модуля 500, выполненный с возможностью генерирования импульсов тока, а также любые иные подходящие микросхемы и функциональные компоненты, описанные в данном документе в отношении самоходного модуля 500. Внутренний корпус 150 может быть жестко закреплен относительно внешнего корпуса 100, либо может не иметь с ним жестких связей и может быть установлен с возможностью перемещения и смещения или изменения формы во внутреннем пространстве внешнего корпуса 100. Например, внутренний корпус 150 и/или внешний корпус 100 может быть выполнен из эластичного материала, обеспечивающего возможность изменения формы внутреннего 150 и/или внешнего корпуса 100 при перемещении самоходного модуля 500 соответственно.
Каждая ножка 200 в каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 13а-13е, шарнирно соединена с внутренним корпусом 150 и шарнирно соединена с внешним корпусом 100, при этом внутренний корпус 150 и внешний корпус 100 выполнены каждый из электроактивного полимера.
Кроме того, каждый участок внутреннего корпуса 150, с которым соединены две смежные ножки 200 в каждом из самоходных модулей 500, показанных на фиг. 13а-13е, электрически соединен с генератором тока самоходного модуля 500 с возможностью сокращения или расширения при подаче, посредством указанного генератора тока, импульса тока на указанный участок внутреннего корпуса 150, что обеспечивает возможность сведения указанных двух смежных ножек 200 (т.е. возможность их смещения или перемещения друг к другу) или возможность разведения указанных двух смежных ножек 200 (т.е. возможность их смещения или перемещения друг от друга в разные стороны).
Аналогичным образом, каждый участок внешнего корпуса 100, с которым соединены две смежные ножки 200 в каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 13а-13е, также электрически соединен с генератором тока самоходного модуля 500 с возможностью сокращения или расширения при подаче, посредством указанного генератора тока, импульса тока на указанный участок внутреннего корпуса 150 под управлением управляющего устройства самоходного модуля 500, соединенного с указанным генератором тока с возможностью управления его работой, что обеспечивает возможность сведения указанных двух смежных ножек 200 (т.е. возможность их смещения или перемещения друг к другу или в сторону друг друга) или возможность разведения указанных двух смежных ножек 200 (т.е. возможность их смещения или перемещения друг от друга или в разные стороны).
В качестве альтернативы выполнению внутреннего корпуса 150 из электроактивного полимера между каждыми двумя смежными ножками 200 с внешней стороны внутреннего корпуса 150 по меньшей мере в одном или в каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 13а-13е, может быть установлен функциональный элемент (не показан) из электроактивного полимера, функционально соединенный с генератором тока самоходного модуля 500 и соединенный или скрепленный с каждой из указанных двух смежных ножек 200 с возможностью сокращения или расширения при подаче, посредством указанного генератора тока, импульса тока на указанный функциональный элемент под управлением управляющего устройства самоходного модуля 500, соединенного с указанным генератором тока с возможностью управления его работой, что обеспечивает возможность сведения указанных двух смежных ножек 200 (т.е. возможность их смещения или перемещения друг к другу или в сторону друг друга) со стороны внутреннего корпуса 150 или возможность разведения указанных двух смежных ножек 200 (т.е. возможность их смещения или перемещения друг от друга или в разные стороны) со стороны внутреннего корпуса 150.
Кроме того, в качестве альтернативы выполнению внешнего корпуса 100 из электроактивного полимера между каждыми двумя смежными ножками 200 с внешней стороны внешнего корпуса 100 по меньшей мере в одном или в каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 13а-13е, может быть установлен функциональный элемент (не показан) из электроактивного полимера, функционально соединенный с генератором тока самоходного модуля 500 и соединенный или скрепленный с каждой из указанных двух смежных ножек 200 с возможностью сокращения или расширения при подаче, посредством указанного генератора тока, импульса тока на указанный функциональный элемент под управлением управляющего устройства самоходного модуля 500, соединенного с указанным генератором тока с возможностью управления его работой, что обеспечивает возможность сведения указанных двух смежных ножек 200 (т.е. возможность их смещения или перемещения друг к другу или в сторону друг друга) со стороны внешнего корпуса 100 или возможность разведения указанных двух смежных ножек 200 (т.е. возможность их смещения или перемещения друг от друга или в разные стороны) со стороны внешнего корпуса 100.
В качестве еще одной альтернативы выполнению внутреннего корпуса 150 из электроактивного полимера между каждыми двумя смежными ножками 200 с внешней стороны внутреннего корпуса 150 по меньшей мере в одном или в каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 13а-13е, может быть установлен электромеханический или электромагнитный элемент (не показан), функционально соединенный с генератором тока самоходного модуля 500, работающим под управлением управляющего устройства самоходного модуля 500, и соединенный или скрепленный с каждой из указанных двух смежных ножек 200 с обеспечением возможности сведения указанных двух смежных ножек 200 (т.е. возможности их смещения или перемещения друг к другу или в сторону друг друга) со стороны внутреннего корпуса 150 или возможности разведения указанных двух смежных ножек 200 (т.е. возможности их смещения или перемещения друг от друга или в разные стороны) со стороны внутреннего корпуса 150 при подаче, посредством указанного генератора тока, импульса тока на указанный электромеханический или электромагнитный элемент под управлением управляющего устройства самоходного модуля 500.
В качестве еще одной альтернативы выполнению внешнего корпуса 100 из электроактивного полимера между каждыми двумя смежными ножками 200 с внешней стороны внешнего корпуса 100 по меньшей мере в одном или в каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 13а-13е, может быть установлен электромеханический или электромагнитный элемент (не показан), функционально соединенный с генератором тока самоходного модуля 500, работающим под управлением управляющего устройства самоходного модуля 500, и соединенный или скрепленный с каждой из указанных двух смежных ножек 200 с обеспечением возможности сведения указанных двух смежных ножек 200 (т.е. возможности их смещения или перемещения друг к другу или в сторону друг друга) со стороны внешнего корпуса 100 или возможности разведения указанных двух смежных ножек 200 (т.е. возможности их смещения или перемещения друг от друга или в разные стороны) со стороны внешнего корпуса 100 при подаче, посредством указанного генератора тока, импульса тока на указанный электромеханический или электромагнитный элемент под управлением управляющего устройства самоходного модуля 500.
В одном из вариантов реализации настоящего изобретения по меньшей мере один или каждый из внутреннего корпуса 150 и внешнего корпуса 100 может быть выполнен из эластичного материала, обеспечивающего возможность сведения или разведения двух смежных ножек 200 (т.е. пары смежных ножек) со стороны по меньшей мере одного или каждого из внутреннего корпуса 150 и внешнего корпуса 100.
В другом варианте реализации настоящего изобретения по меньшей мере один или каждый из внутреннего корпуса 150 и внешнего корпуса 100 может быть выполнен из твердого материала и может быть снабжен направляющими, обеспечивающими возможность сведения или разведения каждых двух смежных ножек 200 (т.е. каждой пары смежных ножек) со стороны по меньшей мере одного или каждого из внутреннего корпуса 150 и внешнего корпуса 100 или возможность сведения или разведения по меньшей мере одной такой пары смежных ножек.
Еще в одном варианте реализации настоящего изобретения по меньшей мере одна или каждая из пар сводимых или разводимых ножек может представлять собой отдельную функциональную пару ножек, в которой ни одна из смежных ножек 200 не может быть использована ни в одной из других подобных функциональных пар ножек при взаимодействии двух самоходных модулей 500, показанных на фиг. 13а-13е, друг с другом.
В другом варианте реализации настоящего изобретения по меньшей мере одна или каждая из смежных ножек 200 по меньшей мере в одной или каждой из пар сводимых или разводимых ножек может быть использована в одной из других пар сводимых или разводимых ножек при взаимодействии двух самоходных модулей 500, показанных на фиг. 13а-13е, друг с другом.
Изменение состояния каждых двух смежных ножек 200 (т.е. каждой задействованной пары двух смежных ножек) по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулях 500, показанных на фиг. 13а-13е, может происходить под управлением управляющих устройств этих самоходных модулей 500 одним из следующих способов: (i) сведение или разведение только со стороны внешнего корпуса 100, (ii) сведение или разведение только со стороны внутреннего корпуса 150, (iii) сведение или разведение одновременно со стороны внешнего корпуса 100 и со стороны внутреннего корпуса 150, (iii) сведение со стороны внутреннего корпуса 150 и разведение со стороны внешнего корпуса 100, и (iv) разведение со стороны внутреннего корпуса 150 и сведение со стороны внешнего корпуса 100.
Различная комбинация схем сведения и разведения ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулях 500, показанных на фиг. 13а-13е, обеспечивает возможность перемещения корпуса одного из указанных самоходных модулей 500 по корпусу другого самоходного модуля из указанных самоходных модулей 500 в результате последовательного или поочередного взаимного захвата ножек 200, относящихся к указанным самоходным модулям 500.
На фиг. 14-18 показан еще один иллюстративный вариант реализации самоходного модуля 500 согласно настоящему изобретению, при этом фиг. 14-18 также наглядно иллюстрирует еще один пример процесса взаимодействия двух самоходных модулей 500 друг с другом с использованием двадцати шести (26) промежуточных состояний А-1:А-26 указанных взаимодействующих между собой самоходных модулей 500.
Следует отметить, что каждая из ножек 200, которыми снабжен корпус 100 в каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 14-18, установлена на соответствующем корпусе 100 с возможностью ее по меньшей мере частичного или полного выдвижения из указанного корпуса 100 или с возможностью ее по меньшей мере частичного или полного задвигания в указанный корпус 100 с использованием механизма выдвижения ножки для изменения степени выдвижения ножки (например, привода или приводного устройства для выдвижения ножки), который может быть также назван как механизм или модуль для изменения длины ножки и работой которого может управлять управляющее устройство самоходного модуля 500, в том числе в ответ на соответствующие управляющие команды, принимаемые указанным управляющим устройством самоходного модуля 500 от внешнего источника управления. Таким образом, механизм выдвижения ножки для изменения степени выдвижения ножки в каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 14-18, функционально соединен с каждой из ножек 200, которыми снабжен корпус 100 в указанном самоходном модуле 500, с обеспечением возможности полного или по меньшей мере частичного выдвижения (вытягивания) указанной ножки 200 из указанного корпуса 100 или задвигания возможности полного или по меньшей мере частичного задвигания (втягивания) указанной ножки 200 в указанный корпус 100 при приведении в действие (т.е. включении или активации) указанного механизма выдвижения ножки под управлением управляющего устройства, входящего в состав указанного самоходного модуля 500.
Следует также отметить, что каждая из ножек 200 в каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 14-18, исходно или первоначально полностью или по меньшей мере частично выдвинута (вытянута) из соответствующего корпуса 100, так что указанная ножка 200 может быть переведена или может переходить из выдвинутого состояния (вытянутого состояния), соответствующего исходному состоянию указанной ножки 200, в задвинутое состояние (втянутое состояние), соответствующее рабочему состоянию указанной ножки 200, и далее наоборот из указанного задвинутого состояния (втянутого состояния) в указанное выдвинутое состояние (вытянутое состояние) под управлением управляющего устройства самоходного модуля 500.
В частности, промежуточное состояние А-1 самоходных модулей 500, показанное на фиг. 14, иллюстрирует сближение указанных самоходных модулей 500 друг с другом под управлением управляющих устройств этих самоходных модулей 500, промежуточные состояния А-2:А-3 самоходных модулей 500, показанные на фиг. 14, иллюстрируют вхождение каждой из двух смежных ножек 200, которыми снабжен корпус 100 в одном из указанных самоходных модулей 500, в пространство, ограниченное между соответствующими двумя смежными ножками 200, которыми снабжен корпус 100 в другом из указанных самоходных модулей 500, а промежуточное состояние А-4, в которое самоходные модули 500, показанные на фиг. 14, переходят из вышеописанного предыдущего состояния А-3, иллюстрирует вхождение указанных самоходных модулей 500 во взаимодействие друг с другом путем вхождения каждой из двух смежных ножек 200, которыми снабжен корпус 100 в одном из указанных самоходных модулей 500, в контакт с соответствующей одной из двух смежных ножек 200, которыми снабжен корпус 100 в другом из указанных самоходных модулей 500.
Следует отметить, что каждая из ножек 200 по меньшей мере в одном из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 14-18, может быть снабжена по меньшей мере одним датчиком контакта, выполненными каждый с возможностью обнаружения контакта указанной ножки 200 по меньшей мере с одной из ножек 200, которыми может быть снабжен корпус 100 в другом из указанных взаимодействующих между собой самоходных модулей 500, и соединенными каждый с возможностью обмена данными с управляющим устройством, входящим в состав указанного самоходного модуля 500, так что указанное управляющее устройство самоходного модуля 500 может обеспечивать возможность одновременного или последовательно изменения состояния по меньшей мере одной из ножек 200, которыми снабжен корпус 100 в указанном самоходном модуле 500 в ответ на показания, принятые от указанного по меньшей мере одного датчика контакта.
Далее, промежуточные состояния А5-А8, показанные на фиг. 15, иллюстрируют циклы взаимодействия самоходных модулей 500 друг с другом, в которых каждая из трех ножек 200, которыми снабжен корпус 100 в одном из взаимодействующих между собой самоходных модулей 500, переходит из своего исходного состояния, переходит в свое рабочее состояние, в котором она входит во взаимодействие с соответствующей одной из трех ножек 200, которыми снабжен корпус 100 в другом из указанных взаимодействующих между собой самоходных модулей 500 и каждая из которых переведена из своего исходного состояния в свое рабочее состояние, с обеспечением опоры на нее для перемещения корпуса 100 одного из указанных взаимодействующих между собой самоходных модулей 500 по корпусу 100 другого из указанных взаимодействующих между собой самоходных модулей 500.
Следует отметить, что в каждом из промежуточных состояний А5-А8, показанных на фиг. 15, каждая из трех задействованных ножек 200 в каждом из взаимодействующих между собой самоходных модулей 500, переведена в свое рабочее состояние, характеризующееся заданной степенью выдвижения или заданной длиной, регулируемой посредством механизма выдвижения ножки под управлением управляющего устройства указанного самоходного модуля 500 в соответствии с предварительно заданной моделью или схемой выдвижения или задвигания ножек 200, известной указанному управляющему устройству самоходного модуля 500, при этом степень выдвижения или длина указанной ножки 200, находящейся в своем рабочем состоянии, может изменяться или сохраняться при переходе от одного из указанных промежуточных состояний А5-А8 к другому из указанных промежуточных состояний А5-А8. Другими словами, в каждом из промежуточных состояний А5-А8 каждая из трех задействованных ножек 200 в каждом из взаимодействующих между собой самоходных модулей 500, показанных на фиг. 15, может переходить в свое новое рабочее состояние, характеризующееся иной или отличной степенью выдвижения ножки или длиной ножки 200, или может сохранять свое предыдущее рабочее состояние (т.е. сохранять неизменной свою степень выдвижения или свою длину) под управлением управляющего устройства, относящегося к соответствующему одному из указанных взаимодействующих между собой самоходных модулей 500, на корпусе 100 которого установлена указанная ножка 200. Как показано на фиг. 15, в промежуточном состоянии А8 две из трех задействованных ножек 200, относящихся к одному из взаимодействующих между собой самоходных модулей 500, упираются каждая в соответствующую одну из трех задействованных ножек 200, относящихся к другому из указанных взаимодействующих между собой самоходных модулей 500, с обеспечением начала подъема корпуса 100, который снабжен указанными двумя упирающимися ножками 200, по корпусу 100, относящемуся к указанному другому самоходному модулю 500.
Далее, промежуточные состояния А9-А12, показанные на фиг. 16, иллюстрируют циклы взаимодействия самоходных модулей 500 друг с другом, в которых упирающиеся ножки 200, которыми снабжен поднимаемый корпус 100, поочередного переходят из одного рабочего состояния в другое рабочее состояние, в котором они имеют большую степень выдвижения или большую длину, под управлением управляющего устройства, установленного в указанном поднимаемом корпусе 100, что каждый раз обеспечивает продолжение перемещения или подъема указанного поднимаемого корпуса 100 по корпусу 100, относящемуся к другому самоходному модулю 500. Следует отметить, в промежуточных состояниях А9-А12, показанных на фиг. 16, управляющее устройство, относящееся к другому самоходному модулю 500, обеспечивает возможность регулирования степени выдвижения или длины ножек 200, которыми снабжен корпус 100 в указанном другом самоходном модуле 500, с использованием механизма выдвижения ножки, относящегося к указанному другому самоходному модулю 500, для обеспечения удержания поднимаемого корпуса 100 на указанном другом самоходном модуле 500 и продолжения подъема поднимаемого корпуса 100 по указанному другому самоходному модулю 500 в результате взаимодействия ножек 200, относящихся к взаимодействующим между собой самоходным модулям 500, друг с другом.
Далее, промежуточные состояния А13-А16, показанные на фиг. 17, иллюстрируют циклы взаимодействия самоходных модулей 500 друг с другом, в которых управляющие устройства указанных взаимодействующих между собой самоходных модулей 500 регулируют степень выдвижения или длину взаимодействующих друг с другом ножек 200, задействованных указанными управляющими устройствами в обоих указанных взаимодействующих между собой самоходных модулях 500 в каждом из указанных промежуточных состояний А13-А16, с обеспечением подъема поднимаемого корпуса 100, относящего к одному из взаимодействующих между собой самоходных модулей 500, на верхнюю часть или вершину корпуса 100, относящегося к другому из взаимодействующих между собой самоходных модулей 500, и обеспечением удержания указанного поднимаемого корпуса 100 на указанной вершине.
Далее, промежуточные состояния А17-А20, показанные на фиг. 18, иллюстрируют циклы взаимодействия самоходных модулей 500 друг с другом, в которых управляющие устройства указанных взаимодействующих между собой самоходных модулей 500 регулируют степень выдвижения или длину взаимодействующих друг с другом ножек 200, задействованных указанными управляющими устройствами в обоих указанных взаимодействующих между собой самоходных модулях 500 в каждом из указанных промежуточных состояний А17-А20, с обеспечением спуска корпуса 100, относящего к одному из взаимодействующих между собой самоходных модулей 500, с верхней части или вершины корпуса 100, относящегося к другому из взаимодействующих между собой самоходных модулей 500, и обеспечением удержания указанного поднимаемого корпуса 100 на указанном другом самоходном модуле 500 при осуществлении указанного спуска (т.е. без падения или неконтролируемого скатывания вниз).
Далее, промежуточные состояния А21-А24, показанные на фиг. 19, иллюстрируют циклы взаимодействия самоходных модулей 500 друг с другом, в которых управляющие устройства указанных взаимодействующих между собой самоходных модулей 500 регулируют степень выдвижения или длину взаимодействующих друг с другом ножек 200, задействованных указанными управляющими устройствами в обоих указанных взаимодействующих между собой самоходных модулях 500 в каждом из указанных промежуточных состояний А21-А24, с обеспечением продолжения спуска корпуса 100, относящего к одному из взаимодействующих между собой самоходных модулей 500, по корпусу 100, относящемуся к другому из взаимодействующих между собой самоходных модулей 500, до контакта части из ножек 200, относящихся к указанному спускаемому корпусу 100, до заданной поверхности перемещения и с обеспечением удержания указанного спускаемого корпуса 100 на указанном другом самоходном модуле 500 при осуществлении указанного продолжаемого спуска (т.е. без падения или неконтролируемого скатывания вниз).
В заключении промежуточные состояния А25-А26, показанные на фиг. 20, иллюстрируют циклы взаимодействия самоходных модулей 500 друг с другом, в которых управляющие устройства указанных взаимодействующих между собой самоходных модулей 500 регулируют степень выдвижения или длину взаимодействующих друг с другом ножек 200, задействованных указанными управляющими устройствами в обоих указанных взаимодействующих между собой самоходных модулях 500 в каждом из указанных промежуточных состояний А25-А26, с обеспечением постепенного выхода указанных самоходных модулей 500, показанных на фиг. 20, из взаимодействия друг с другом и обеспечением перемещения корпуса 100, относящегося к спустившемуся самоходному модулю 500, по поверхности перемещения в сторону от другого самоходного модуля 500, по корпусу 100 которого совершил перемещение указанный спустившийся самоходный модуль 500 или с корпуса 100 которого спустился указанный спустившийся самоходный модуль 500. Следует отметить, что после полного выхода самоходных модулей 500 из взаимодействия друг с другом управляющие устройства этих вышедших из взаимодействия самоходных модулей 500 переводят все ранее задействованные ножки 200 в их исходные состояния, в которых они имеют наибольшую степень выдвижения или длину.
На фиг. 21 показан трехмерный объект, имеющий в целом в разрезе форму шестиугольника, при этом указанный трехмерный объект сформирован из девятнадцати (19) самоходных модулей 500, каждый из которых выполнен аналогично любому из самоходных модулей 500, описанных выше со ссылкой на фиг. 14-18, и которые последовательно или поочередно введены во взаимодействие друг с другом с обеспечением их размещения в заданных пространственных местоположениях в соответствии с заданной моделью или схемой формирования трехмерного объекта под управлением управляющих устройств, относящихся к указанным введенным во взаимодействие друг с другом самоходным модулям 500. Следует отметить, что каждый из самоходных модулей 500 в составе трехмерного объекта, показанного на фиг. 21, может принимать по меньшей мере часть из промежуточных состояний А-1:А-26, описанных выше со ссылкой на фиг. 14-18. Следует также отметить, что трехмерный объект, показанный на фиг. 21, может представлять собой подвижную шарообразную конструкцию, выполненную с возможностью перемещения по поверхности перемещения в ответ на управляющие инструкции, принимаемые управляющими устройствами, относящимися к самоходным модулям 500, формирующим указанную шарообразную конструкцию, от внешнего источника управления, при этом перемещение указанной шарообразной конструкции может быть реализовано благодаря перемещению по меньшей мере части из указанных самоходных модулей 500, формирующих эту шарообразную конструкцию, относительно друг друга под управлением соответствующих управляющих устройств, относящихся к указанным подвижным самоходным модулям 500.
В некоторых вариантах реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200, которыми может быть снабжен корпус 100 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500 в составе самоходной системы 1000, может быть по меньшей мере частично вделана (встроена) в корпус 100 или закреплена на корпусе 100 с возможностью изменения ее пространственной ориентации с использованием механизма изменения состояния ножки для изменения пространственной ориентации ножки (например, привода или приводного устройства для изменения пространственной ориентации ножки), который может быть также назван как механизм или модуль для изменения пространственной ориентации ножки и работой которого может управлять управляющее устройство самоходного модуля 500, в том числе в ответ на соответствующие управляющие команды, принимаемые указанным управляющим устройством самоходного модуля 500 от внешнего источника управления. Таким образом, в таких вариантах реализации настоящего изобретения механизм изменения состояния ножки для изменения пространственной ориентации ножки может быть функционально соединен по меньшей мере с одной из ножек 200 с обеспечением возможности изменения пространственной ориентации указанной по меньшей мере одной ножки 200 при приведении в действие (т.е. включении или активации) указанного механизма изменения состояния ножки под управлением управляющего устройства самоходного модуля 500. Следует отметить, что в таких вариантах реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500 в составе самоходной системы 1000, может быть исходно или первоначально наклонена под заданным углом к корпусу 100, так что указанная ножка 200 может быть переведена или может переходить из одного наклонного состояния в другое наклонное состояние, в котором указанная ножка 200 может быть наклонена под другим углом к указанному корпусу 100. Другими словами, в таких вариантах реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500 в составе самоходной системы 1000, может быть выполнена способной изменять свою пространственную ориентацию в результате изменения ее угла наклона по отношению к корпусу 100, а возможность наклона указанной ножки 200 под разным углом к указанному корпусу 100 может быть реализована под управлением управляющего устройства самоходного модуля 500, выдающего управляющие команды на механизм изменения состояния ножки (не показан) для изменения пространственной ориентации ножки, который по меньшей мере задает или регулирует пространственное положение указанной ножки 200 путем изменения степени ее наклона или ее угла наклона к указанному корпусу 100. В таких вариантах реализации настоящего изобретения по меньшей мере одна или каждая из ножек 200 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500 в составе самоходной системы 1000 может чередовать (попеременно принимать через заданные периоды времени) разные наклонные состояния при перемещении указанного самоходного модуля 500 по поверхности перемещения или при взаимодействии указанной ножки 200 с одной или более ножек 200, которыми снабжен корпус 100 в другом самоходном модуле 500 из указанных взаимодействующих между собой самоходных модулей 500. Кроме того, в таких вариантах реализации настоящего изобретения при взаимодействии одной из ножек 200, которыми снабжен корпус 100 в одном из взаимодействующих между собой самоходных модулей 500, с другой из ножек 200, которыми снабжен корпус 100 в другом из указанных взаимодействующих между собой самоходных модулей 500, могут перекрещиваться друг с другом или накладываться друг на друга, при этом по меньшей мере еще одна ножка 200, относящаяся к одному из указанных взаимодействующих между собой самоходных модулей 500, может быть задействована управляющим устройством указанного самоходного модуля 500 для прижатия друг к другу указанных перекрещенных друг с другом или наложенных друг на друга ножек 200, что обеспечивает возможность перемещения корпуса 100, относящегося к одному из указанных взаимодействующих между собой самоходных модулей 500, по корпусу 100, относящемуся к другому из указанных взаимодействующих между собой самоходных модулей 500.
В иных вариантах реализации настоящего изобретения корпус 100 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, входящих в состав самоходной системы 1000, может быть снабжен одним или более движителями (не показаны), а управляющее устройство одного из указанных введенных во взаимодействие друг с другом самоходных модулей 500 может быть дополнительно соединено с указанными движителями с обеспечением возможности приведения в действие по меньшей мере одного или каждого из них для перемещения указанной самоходной системы 1000 по поверхности перемещения. В первой разновидности таких вариантов реализации по меньшей мере один или каждый из движителей, которыми снабжен корпус 100 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, входящих в состав самоходной системы 1000, может представлять собой по меньшей мере одно крыло, по меньшей мере одно колесное шасси, по меньшей мере один гусеничный трак, по меньшей мере одну роботизированную ногу, по меньшей мере одну ласту, по меньшей мере один плавник, по меньшей мере одно весло и/или по меньшей мере один парус, при этом указанный движитель может быть выполнен за одно целое с корпусом 100, может быть прикреплен к корпусу 100 с его наружной стороны или по меньшей мере частично вделан или встроен в корпус 100. Кроме того, в первой разновидности таких вариантов реализации настоящего изобретения по меньшей мере один или каждый из движителей, которыми снабжен корпус 100 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, входящих в состав самоходной системы 1000, может исходно или первоначально находиться в сложенном состоянии или задвинутом (втянутом) состоянии, соответствующем исходному состоянию указанного движителя, в котором он по меньшей мере частично или полностью находится во внутреннем пространстве корпуса 100, и может быть выполнено с возможностью его развертывания соответственно в разложенное или выдвинутое (вытянутое) состояние, соответствующее рабочему состоянию указанного движителя, в котором он по меньшей мере частично или полностью выходит из внутреннего пространства корпуса 100 за его пределы, под управлением вышеописанного управляющего устройства (не показано), входящего в состав системы 1000. Следует отметить, что в первой разновидности таких вариантов реализации настоящего изобретения количество движителей, которыми может быть снабжен корпус 100 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, входящих в состав самоходной системы 1000, может быть подобрано с учетом массогабаритных показателей и конструкционных особенностей корпуса 100 для создания дополнительной движущей силы при перемещении указанного самоходного модуля 500, с учетом необходимости в снижении нагрузки на указанный самоходный модуль 500, с учетом заданной области пространства, в которой предполагается сформировать трехмерный объект из самоходных модулей 500, и/или с учетом необходимости в стабилизации направления движения указанного самоходного модуля 500, то есть по сути зависит от конкретного варианта исполнения такого самоходного модуля 500, который будет использован при формировании трехмерного объекта в заданной области пространства. Следует также отметить, что в первой разновидности таких вариантов реализации настоящего изобретения по меньшей мере один или каждый из движителей, которыми может быть снабжен корпус 100 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, входящих в состав самоходной системы 1000, может быть выполнен складным, телескопическим, выдвижным или т.п.для уменьшения габаритных размеров указанного самоходного модуля 500 в сложенном состоянии, например в случае, когда он припаркован или размещен в одной из парковочных станций, которые могут дополнительно входить в состав самоходной системы 1000, при этом развертывание указанного движителя может быть осуществлено, например, под управлением управляющего устройства указанного самоходного модуля при выходе (например, при выезде, взлете, выплывании, выползании, выпрыгивании и т.п.) этого самоходного модуля 500 из парковочной станции системы 1000, в которой он был размещен, либо непосредственно в процессе перемещения этого самоходного модуля 500 по поверхности перемещения. Во второй разновидности таких вариантов реализации настоящего изобретения по меньшей мере один или каждый из движителей, которыми снабжен корпус 100 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, входящих в состав самоходной системы 1000, может представлять собой одно или более крыльев, выполненных каждое с возможностью уменьшения воздействия воздушных масс на корпус 100 указанного самоходного модуля 500 при его перемещении по поверхности перемещения, или может представлять собой воздушный двигатель (например, винтовой двигатель, реактивный двигатель, комбинированный авиационный двигатель или любой другой подходящий авиационный двигатель, известный в уровне техники), обеспечивающий возможность повышения скорости перемещения указанного самоходного модуля 500 по поверхности перемещения и работающий под управлением управляющего устройства указанного самоходного модуля 500, который может выдавать управляющие команды на драйвер управления воздушным двигателем самоходного модуля 500 с обеспечением возможности запуска, остановки или изменения режима работы указанного воздушного двигателя (например, рабочих параметров воздушного двигателя). В третьей разновидности таких вариантов реализации настоящего изобретения по меньшей мере один или каждый из движителей, которыми снабжен корпус 100 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, входящих в состав самоходной системы 1000, может представлять собой один или более несущих винтов (не показаны) или винтовых движителей любого подходящего типа, известного в уровне техники, для обеспечения возможности перемещения указанного самоходного модуля 500 по поверхности перемещения, в частности для повышения скорости перемещения указанного самоходного модуля 500 по поверхности перемещения. Кроме того, в третьей разновидности таких вариантов реализации настоящего изобретения корпус 100 в каждом из взаимодействующих между собой самоходных модулей 500, снабженных движителем, может дополнительно содержать силовую установку (не показана), которая может быть образована, например, из одного или двух турбовальных двигателей и которая может быть функционально соединена с каждым из несущих винтов, в виде которых может быть выполнен указанный движитель, с обеспечением возможности подачи на них мощности для приведения их в действие, при этом указанная силовая установка самоходного модуля 500 может работать под управлением управляющего устройства указанного самоходного модуля 500, которое может выдавать управляющие команды на драйвер управления силовой установкой (не показана) с обеспечением возможности запуска, остановки или изменения режима работы указанной силовой установки (например, изменения рабочих параметров силовой установки) для изменения состояния этих несущих винтов.
Согласно одному из вариантов реализации настоящего изобретения, в корпусе 100 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, входящих в состав самоходной системы 1000, может быть размещен по меньшей мере один независимый подвижный элемент (не показан), выполненный с возможностью перемещения внутри указанного корпуса 100 под управлением управляющего устройства указанного самоходного модуля 500 с обеспечением возможности перемещения указанного самоходного модуля 500 в пространстве (например, по поверхности перемещения) и, следовательно, возможности перемещения самоходной системы 1000 в целом, в состав которой входит указанный самоходный модуль 500. Управляющее устройство самоходного модуля 500, управляющий работой такого независимого подвижного элемента, может не только приводить в действие указанный подвижный элемент с обеспечением возможности его перемещения и выключать указанный подвижный элемент с обеспечением возможности его остановки, но и изменять параметры работы указанного подвижного элемента (например, скорость перемещения во внутреннем пространстве корпус 100). В качестве примера независимый подвижный элемент самоходного модуля 500 может быть выполнен в виде шара или сферы, перемещающейся в пределах корпуса 100 в указанном самоходном модуле 500. В качестве еще одного примера независимый подвижный элемент самоходного модуля 500 может быть выполнен в виде управляемого устройства или объекта любой формы, способного перекатываться или переваливаться во внутреннем пространстве корпуса 100 в указанном самоходном модуле 500. В качестве другого примера независимый подвижный элемент самоходного модуля 500 может иметь смещенный центр тяжести, что упрощает задачу по обеспечению возможности перемещения такого подвижного элемента во внутреннем пространстве корпуса 100 в указанном самоходном модуле 500. Таким образом, независимый подвижный элемент самоходного модуля 500, размещенный в корпусе 100, относящемся к указанному самоходному модулю 500, при перемещении в пределах корпуса 100 под управлением управляющего устройства самоходного модуля 500 оказывает воздействие на корпус 100 с его внутренней стороны с обеспечением возможности приведения в движение корпуса 100 и, следовательно, самого самоходного модуля 500, который в свою очередь может обеспечивать возможность перемещения всей самоходной системы 1000 в целом.
Согласно другому варианту реализации настоящего изобретения, в корпусе 100 по меньшей мере в одном или каждом из взаимодействующих между собой самоходных модулей 500, входящих в состав самоходной системы 1000, может быть закреплен по меньшей мере один независимый подвижный элемент (не показан), выполненный с возможностью взаимодействия с указанным корпусом 100 под управлением управляющего устройства указанного самоходного модуля 500 с обеспечением возможности перемещения указанного самоходного модуля 500 в пространстве (например, по поверхности перемещения) и, следовательно, возможности перемещения самоходной системы 1000 в целом, в состав которой входит указанный самоходный модуль 500. Управляющее устройство самоходного модуля 500, управляющий работой такого независимого подвижного элемента, может не только приводить в действие указанный подвижный элемент с обеспечением возможности его воздействия на корпус 100 и выключать указанный подвижный элемент с обеспечением возможности его остановки, но и изменять параметры работы указанного подвижного элемента (например, изменять скорость перемещения при воздействии на корпус 100). В качестве примера независимый подвижный элемент самоходного модуля 500 может быть выполнен в виде штыря, стержня, роботизированной руки или т.п., закрепленной с внутренней стороны корпус 100 и перемещающейся в пределах внутреннего пространства корпуса 100 под управлением управляющего устройства самоходного модуля 500 в указанном самоходном модуле 500 с обеспечением возможности воздействия на указанный корпус 100. Таким образом, независимый подвижный элемент самоходного модуля 500, закрепленный в корпусе 100, относящемся к указанному самоходному модулю 500, при взаимодействии с корпусом 100 под управлением управляющего устройства самоходного модуля 500 оказывает воздействие на корпус 100 с его внутренней стороны с обеспечением возможности приведения в движение корпуса 100 и, следовательно, самого самоходного модуля 500, который в свою очередь может обеспечивать возможность перемещения всей самоходной системы 1000 в целом.
Представленные иллюстративные варианты осуществления настоящего изобретения, примеры и описание служат лишь для обеспечения понимания сущности заявляемого изобретения и не являются ограничивающими. Иные возможные варианты осуществления настоящего изобретения, либо модификации или улучшения вышеописанных вариантов реализации настоящего изобретения будут ясны специалисту в данной области техники из представленного выше описания. Объем настоящего изобретения ограничен лишь прилагаемой формулой изобретения.
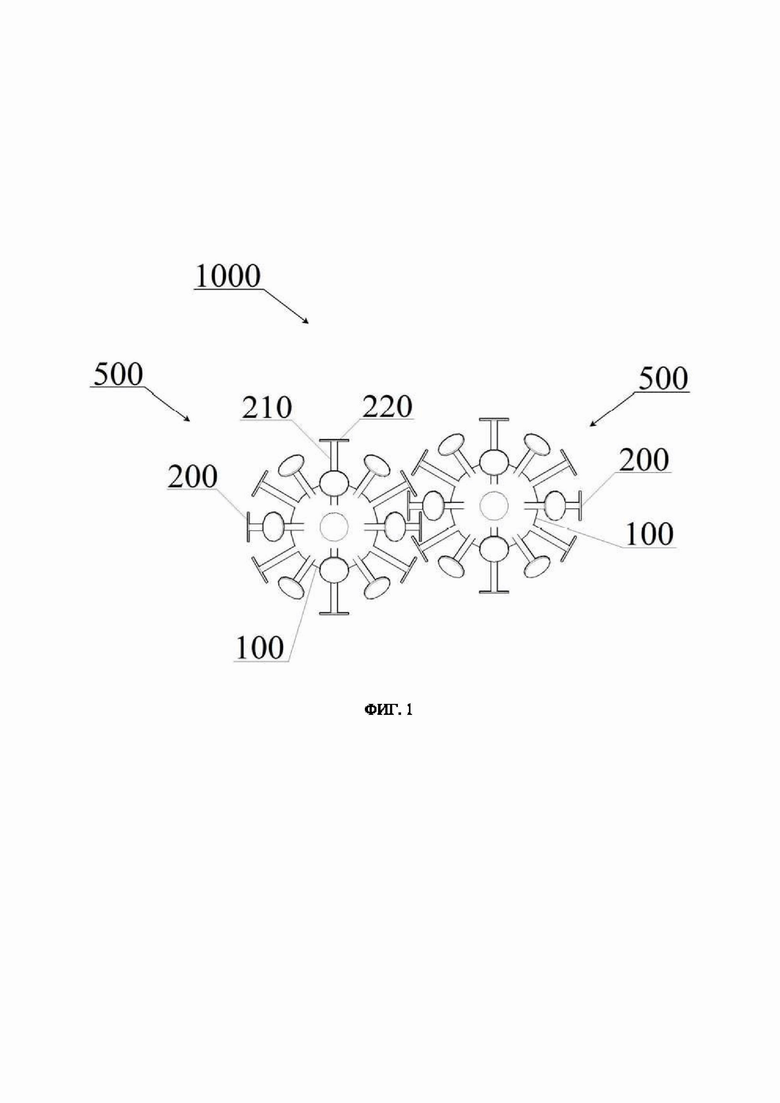
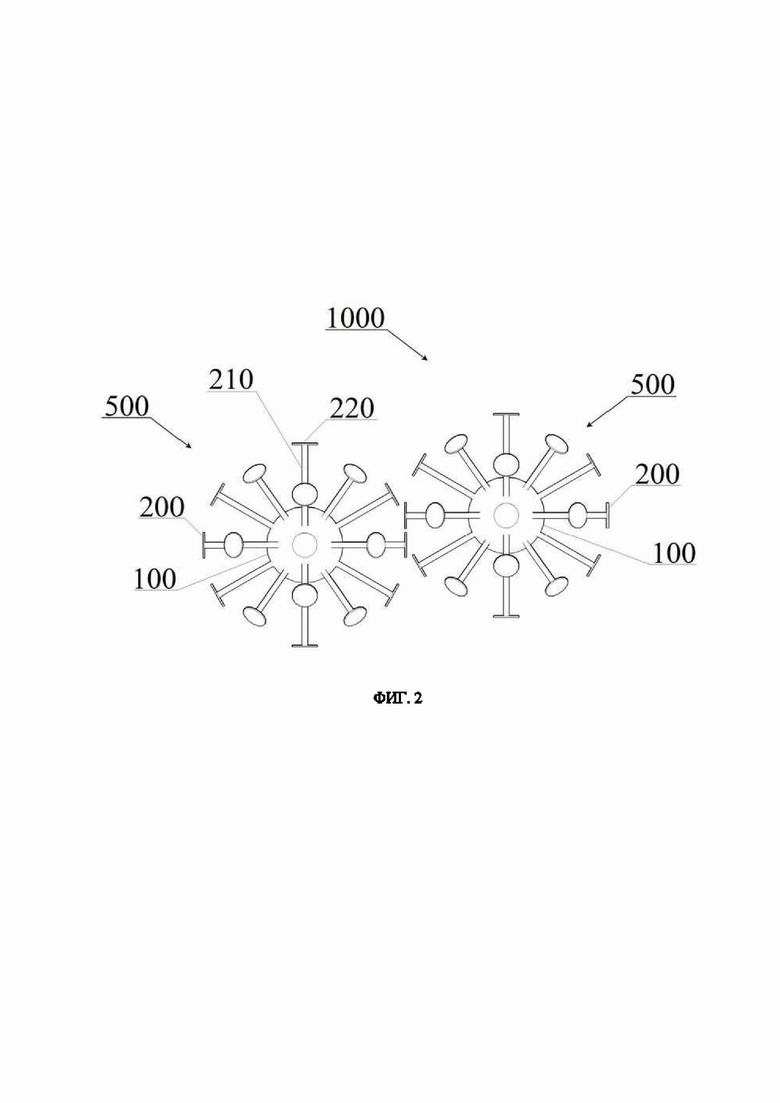

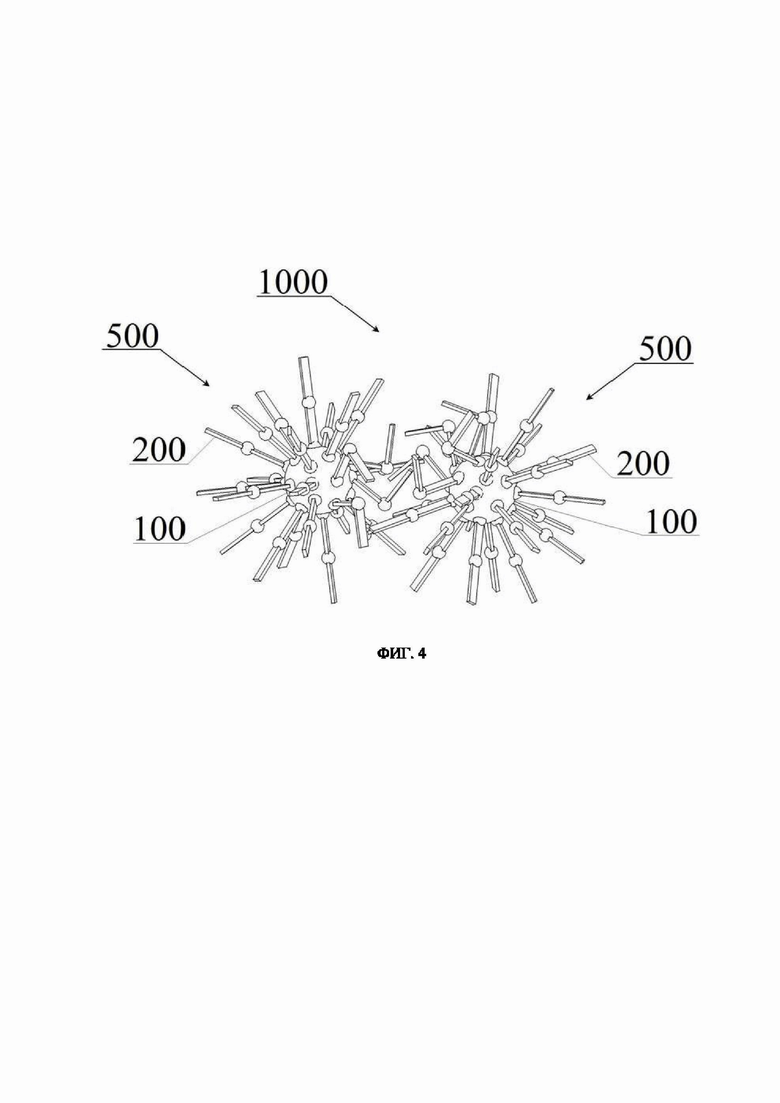

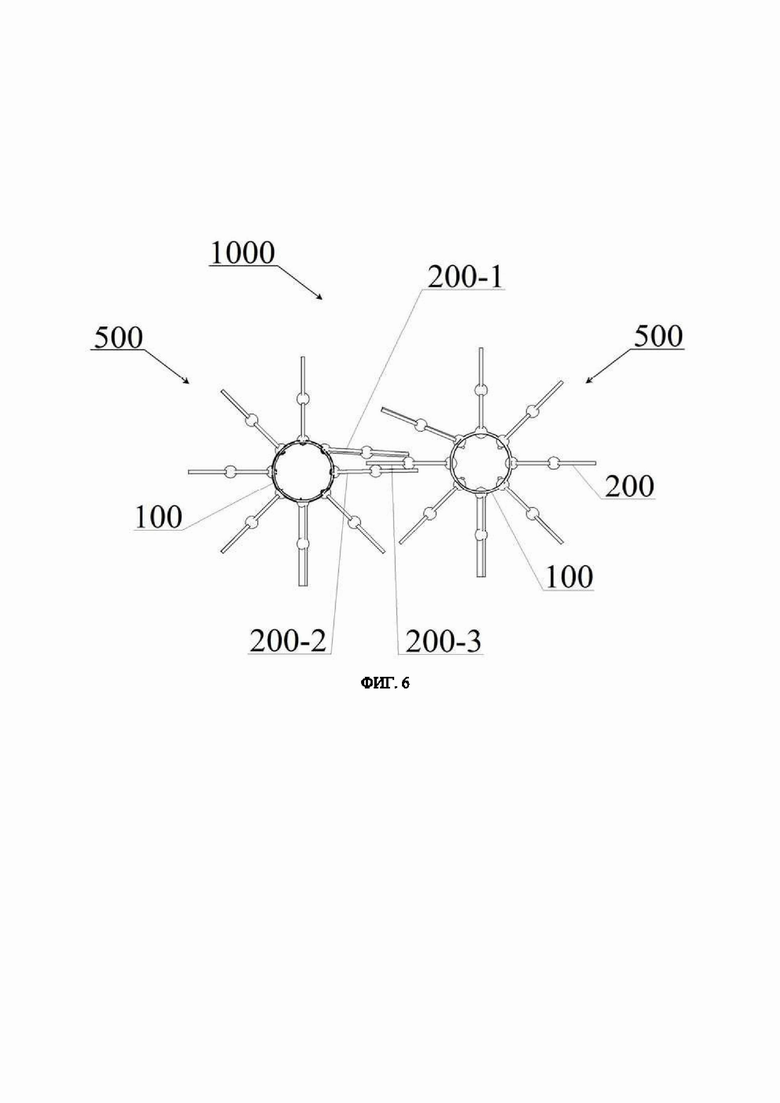



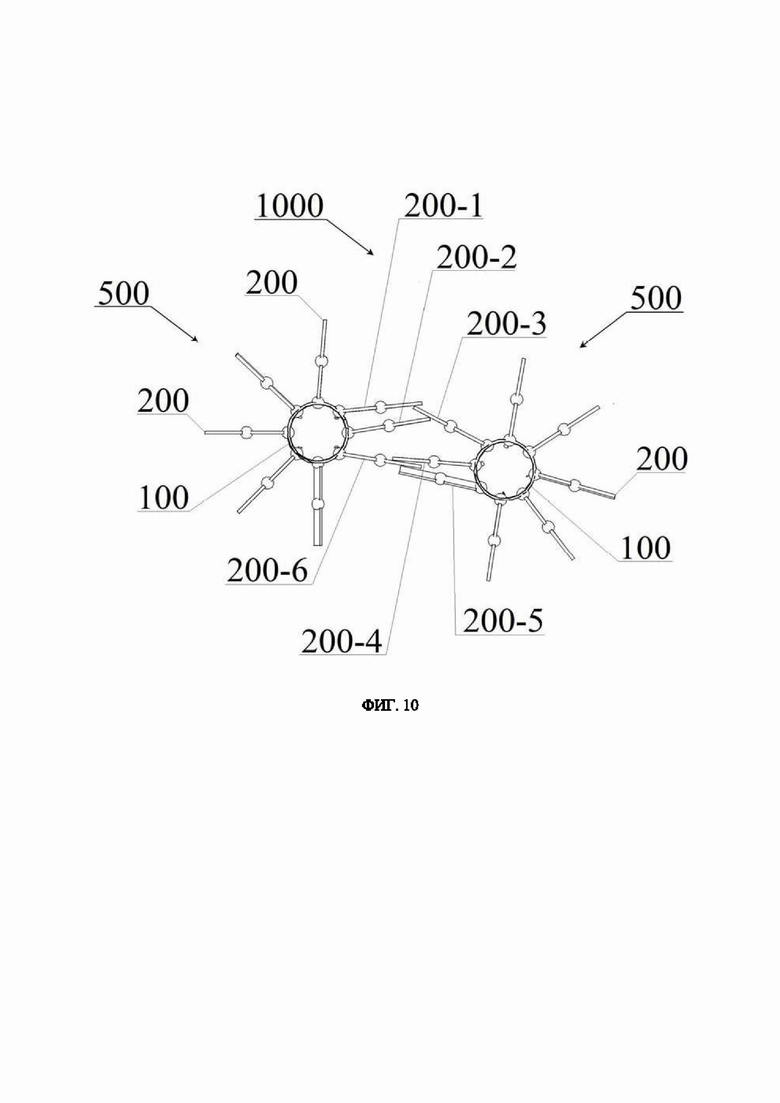

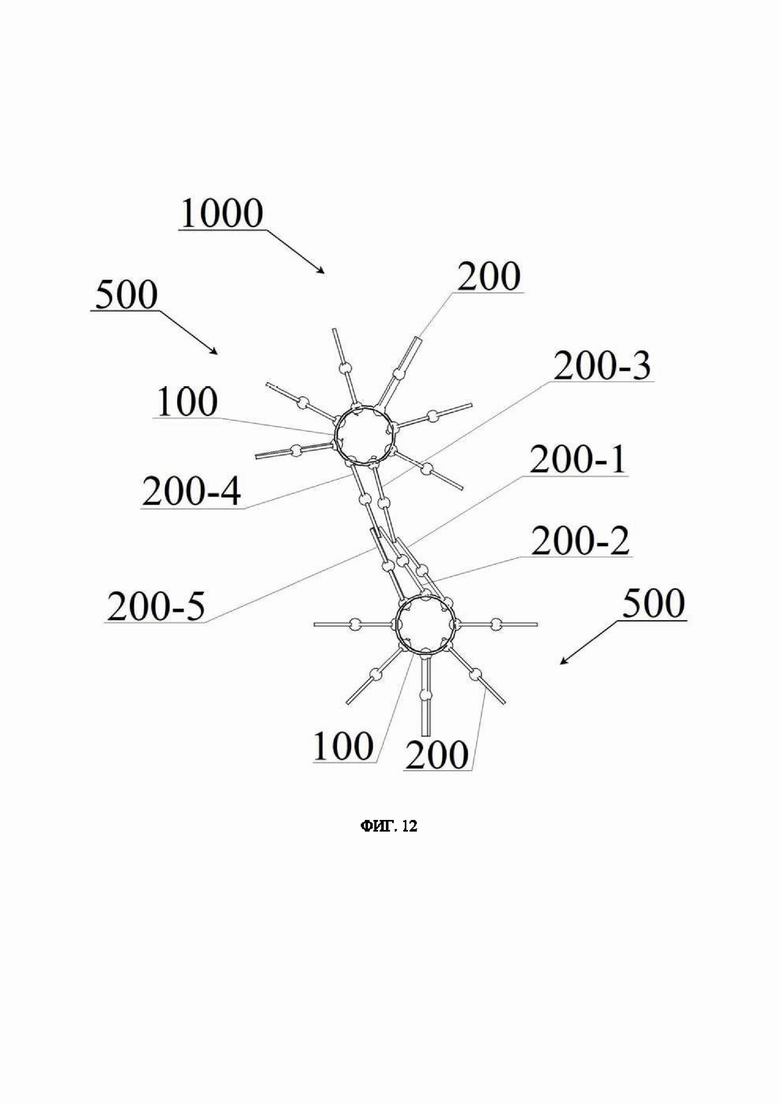

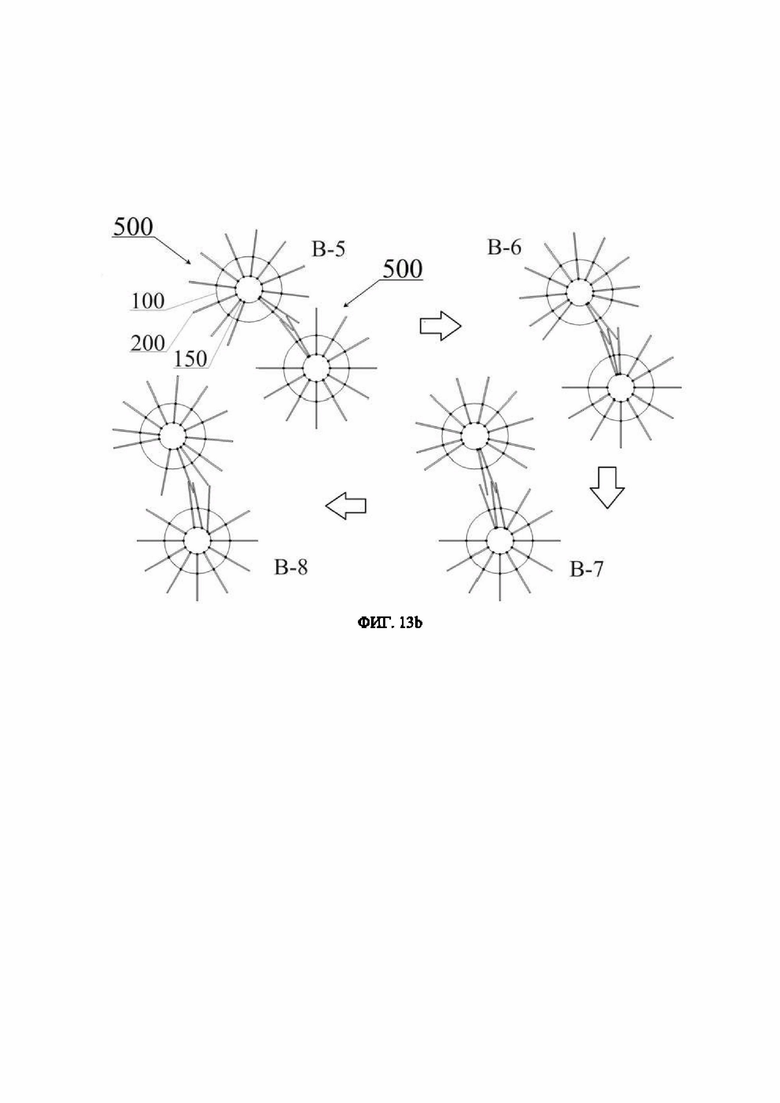
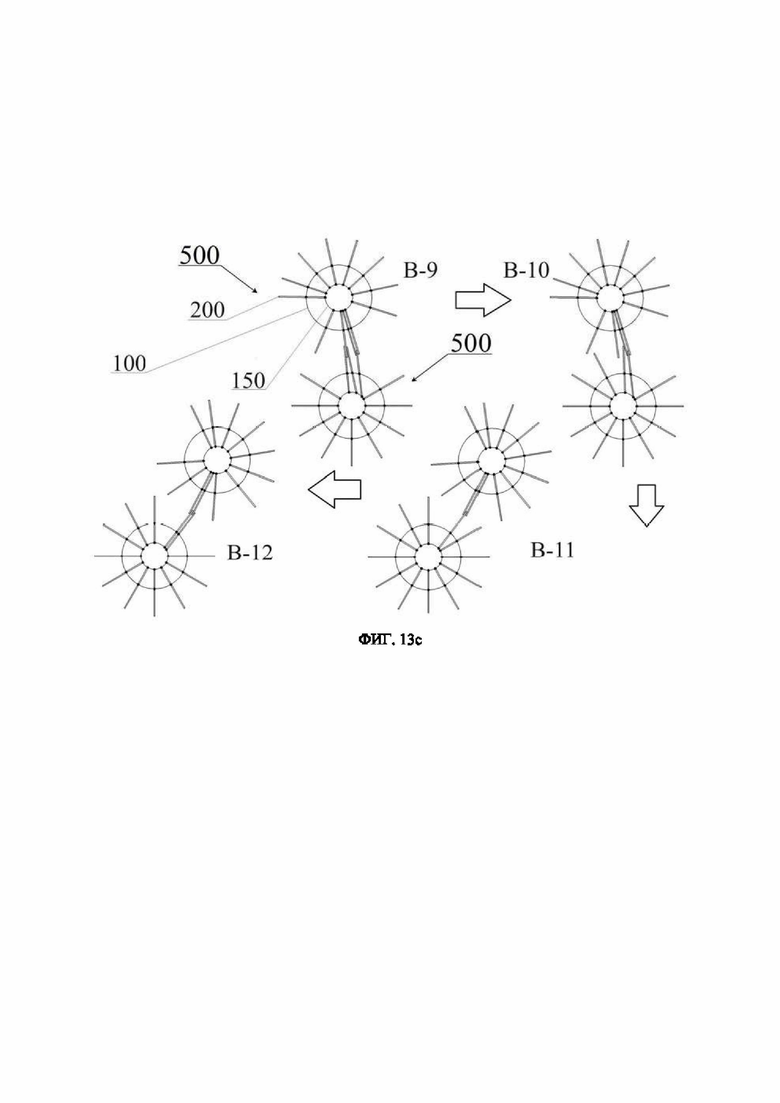
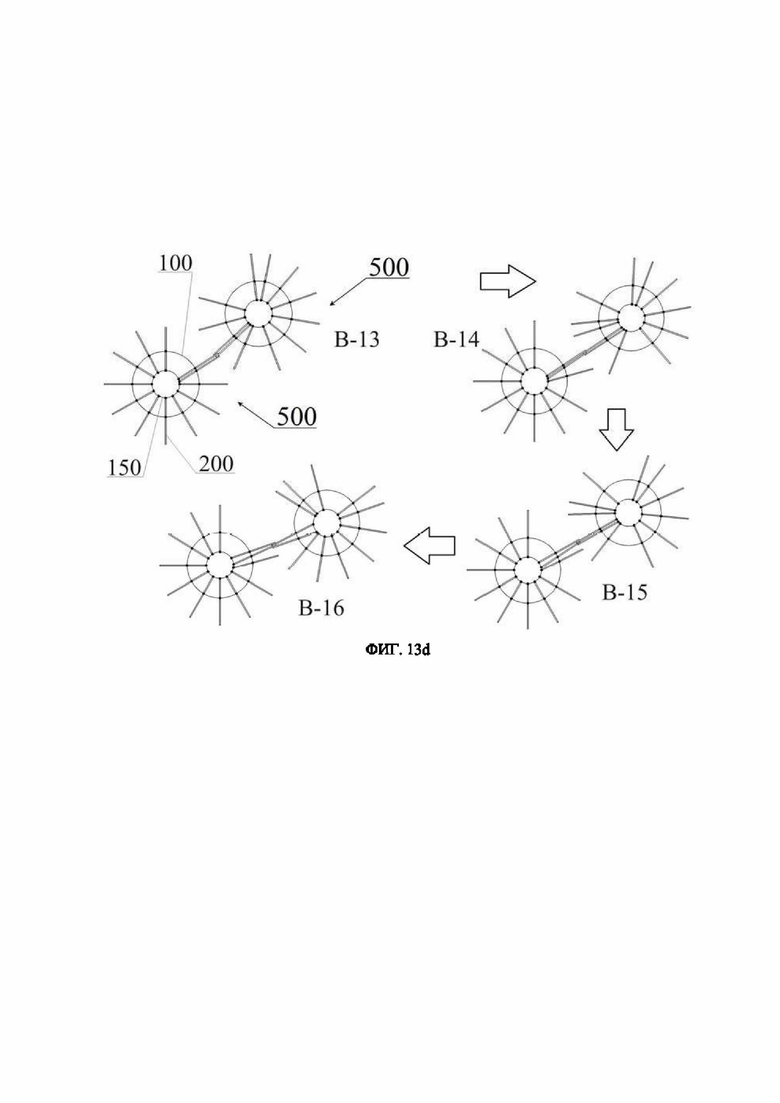
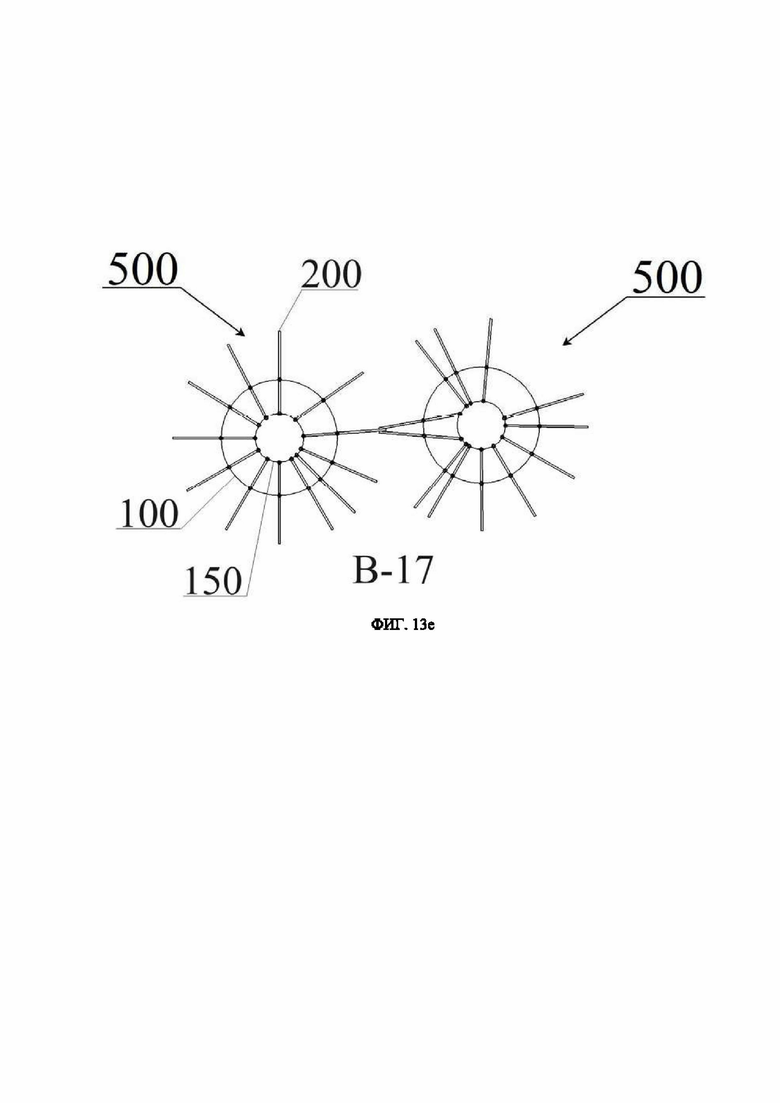


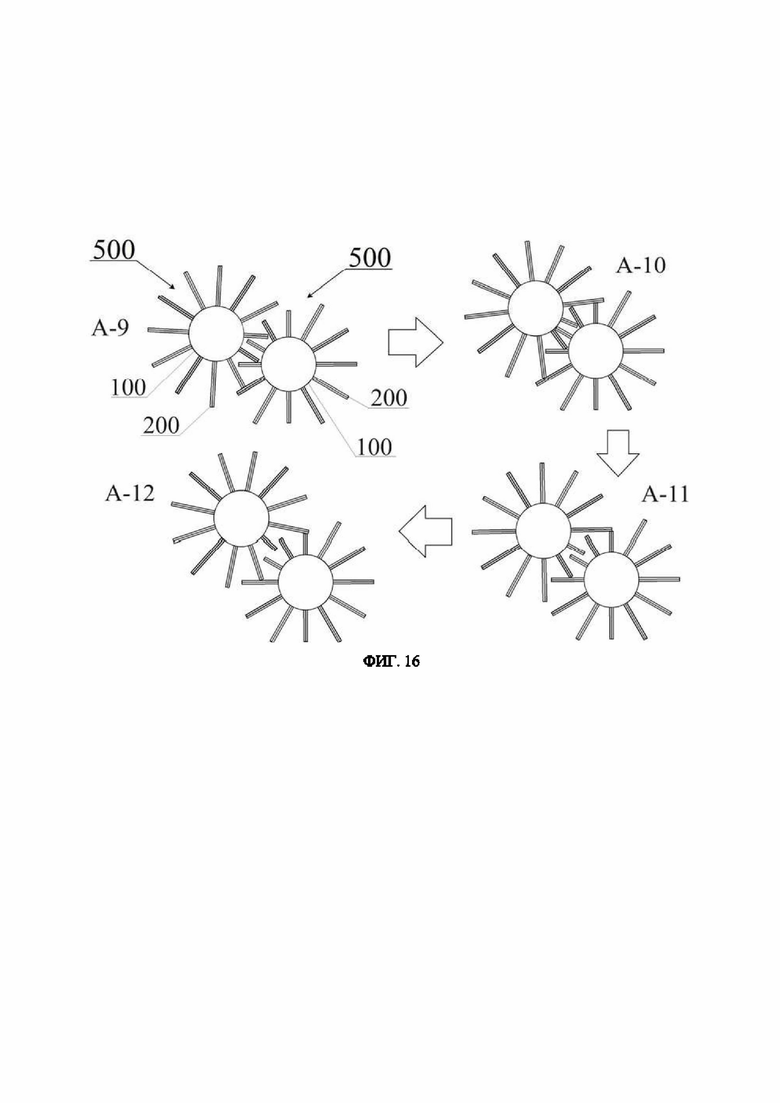
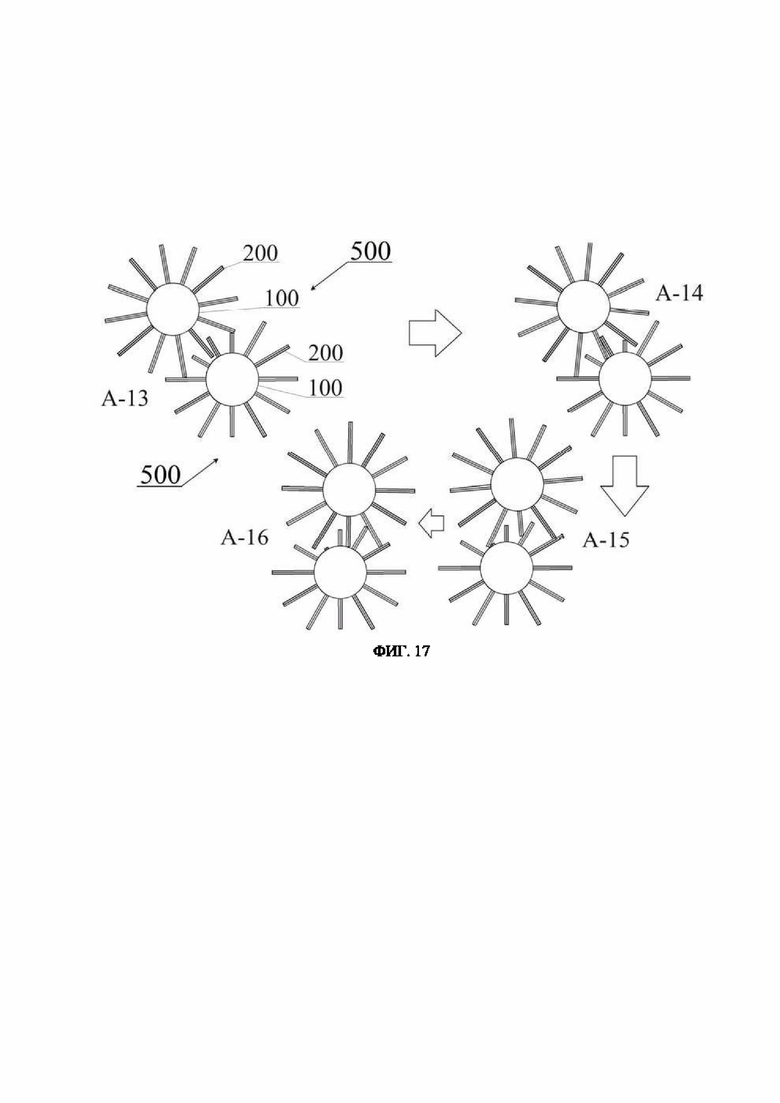
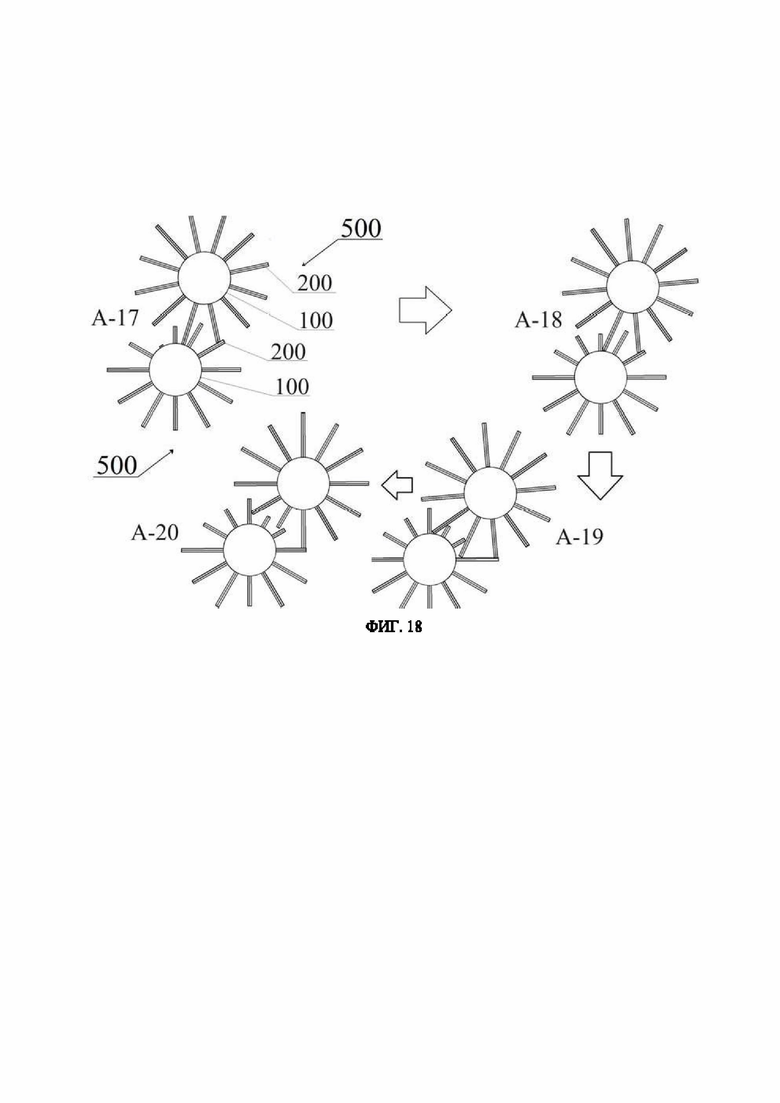

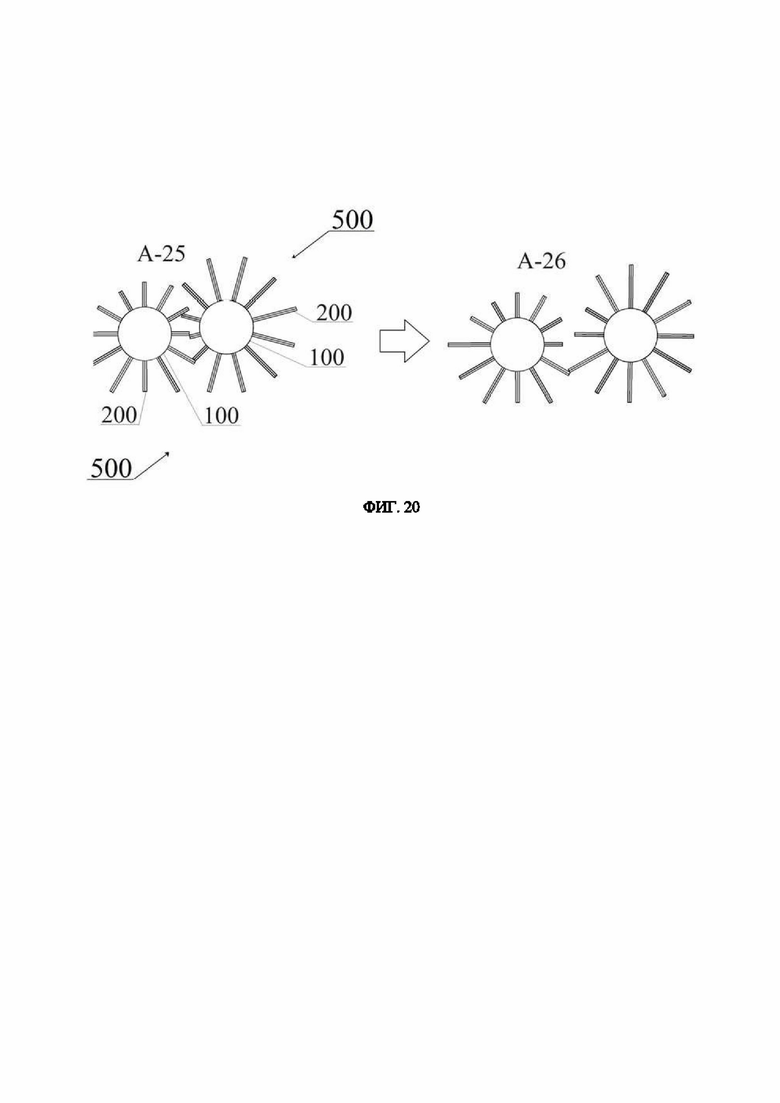
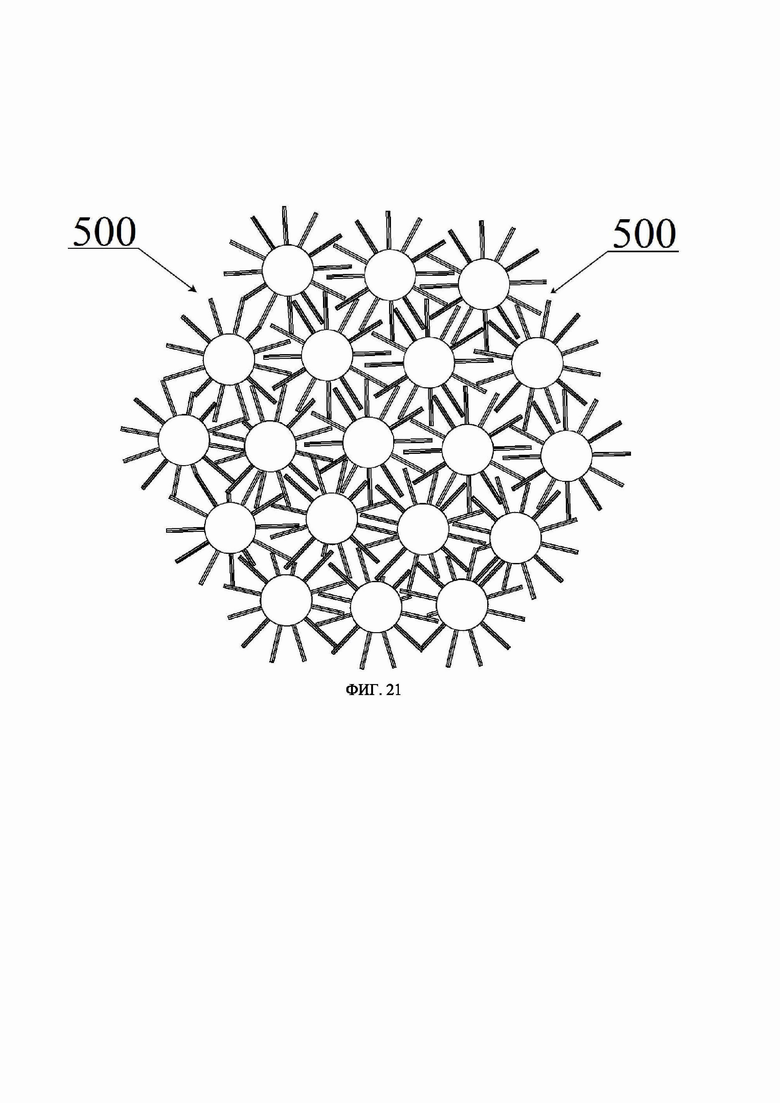
Группа изобретений относится к самоходному модулю и самоходной системе, содержащей взаимодействующие между собой самоходные модули. Самоходный модуль содержит корпус, снабженный ножками, и управляющее устройство. Управляющее устройство соединено по меньшей мере с одной из ножек с обеспечением возможности управляемого изменения ее пространственной ориентации по отношению к указанному корпусу, длины или формы для перемещения указанного корпуса по поверхности перемещения. По меньшей мере две смежные ножки из ножек самоходного модуля выполнены с возможностью разъемного захвата по меньшей мере одной ножки другого самоходного модуля с обеспечением возможности размещения самоходных модулей друг на друге или возможности перемещения самоходных модулей друг по другу. Достигается расширение арсенала самоходных модулей, способных совершать перемещение по поверхности перемещения, в качестве которой может выступать поверхность корпуса другого самоходного модуля того же типа. 2 н. и 27 з.п. ф-лы, 21 ил.
1. Самоходный модуль, содержащий:
корпус, снабженный ножками; и
управляющее устройство, соединенное по меньшей мере с одной из указанных ножек с обеспечением возможности управляемого изменения ее пространственной ориентации по отношению к указанному корпусу, длины или формы для перемещения указанного корпуса по поверхности перемещения, при этом
в котором по меньшей мере две смежные ножки из указанных ножек самоходного модуля выполнены с возможностью разъемного захвата по меньшей мере одной ножки другого самоходного модуля с обеспечением возможности размещения самоходных модулей друг на друге или возможности перемещения самоходных модулей друг по другу.
2. Самоходный модуль по п. 1, в котором управляющее устройство обеспечивает возможность сжатия и удлинения указанной по меньшей мере одной ножки для перемещения корпуса самоходного модуля по поверхности перемещения.
3. Самоходный модуль по п. 1, в котором управляющее устройство обеспечивает возможность изгибания и распрямления указанной по меньшей мере одной ножки для перемещения корпуса самоходного модуля по поверхности перемещения.
4. Самоходный модуль по п. 1, в котором управляющее устройство обеспечивает возможность изгибания указанной по меньшей мере одной ножки для перемещения корпуса самоходного модуля по поверхности перемещения или для разъемного взаимодействия по меньшей мере с одной ножкой другого самоходного модуля.
5. Самоходный модуль по п. 1, в котором управляющее устройство обеспечивает возможность выдвижения и втягивания указанной по меньшей мере одной ножки по отношению к корпусу самоходного модуля для перемещения корпуса самоходного модуля по поверхности перемещения.
6. Самоходный модуль по п. 1, в котором корпус самоходного модуля или по меньшей мере одна из указанных ножек снабжена одним или более средствами сцепления для сцепления с поверхностью перемещения.
7. Самоходный модуль по п. 6, в котором по меньшей мере одно из указанных средств сцепления выполнено подвижным, а управляющее устройство дополнительно обеспечивает возможность приведения в действие указанного по меньшей одного средства сцепления для его взаимодействия с поверхностью перемещения.
8. Самоходный модуль по п. 7, в котором управляющее устройство дополнительно обеспечивает возможность последовательного приведения в действие по меньшей мере одного из указанных средств сцепления и по меньшей мере одной из указанных ножек, соответствующей указанному по меньшей мере одному средству сцепления, для перемещения корпуса самоходного модуля по поверхности перемещения.
9. Самоходный модуль по п. 1, в котором указанная ножка для взаимодействия с другим самоходным модулем выполнена с возможностью разъемного взаимодействия с корпусом указанного другого самоходного модуля с обеспечением возможности размещения самоходных модулей друг на друге или возможности перемещения самоходных модулей друг по другу.
10. Самоходный модуль по п. 1, в котором одна или более из указанных по меньшей мере двух ножек выполнена с возможностью перемещения по направляющей, по меньшей мере частично вделанной в корпус или размещенной на нем, с обеспечением возможности разъемного взаимодействия с указанной по меньшей мере одной ножкой другого самоходного модуля.
11. Самоходный модуль по п. 1, в котором по меньшей мере одна из указанных ножек самоходного модуля выполнена с возможностью перекрещивания по меньшей мере с одной ножкой другого самоходного модуля с обеспечением возможности их прижатия друг к другу с использованием по меньшей мере одной другой ножки из указанных ножек самоходного модуля или по меньшей мере одной другой ножки указанного другого самоходного модуля.
12. Самоходный модуль по п. 1, в котором по меньшей мере одна из указанных ножек самоходного модуля выполнена в виде управляемого захвата, работающего под управлением управляющего устройства и выполненного с возможностью захвата по меньшей мере одного независимого объекта.
13. Самоходный модуль по п. 12, в котором управляющее устройство дополнительно выполнено с обеспечением возможности управления работой управляемого захвата для размещения указанного захваченного объекта на корпусе самоходного модуля или внутри него.
14. Самоходный модуль по п. 1, в котором по меньшей мере одна из указанных ножек самоходного модуля снабжена управляемым захватом, работающим под управлением управляющего устройства и выполненным с возможностью захвата по меньшей мере одного независимого объекта.
15. Самоходный модуль по п. 14, в котором управляющее устройство дополнительно выполнено с обеспечением возможности управления работой указанного управляемого захвата для размещения указанного захваченного объекта на корпусе самоходного модуля или внутри него.
16. Самоходный модуль по п. 12 или 14, в котором корпус дополнительно снабжен одним или более приемниками, выполненными каждый с возможностью размещения в нем одного или более независимых объектов, а управляющее устройство дополнительно выполнено с обеспечением возможности управления работой управляемого захвата для размещения указанного захваченного объекта в одном из указанных приемников.
17. Самоходный модуль по п. 1, в котором корпус самоходного модуля дополнительно снабжен электромагнитным блоком, приводимым в действие посредством управляющего устройства с обеспечением возможности примагничивания по меньшей мере одного независимого металлического объекта к корпусу самоходного модуля.
18. Самоходный модуль по п. 1, дополнительно содержащий навигационный модуль, выполненный с возможностью определения пространственных координат самоходного модуля или положения указанного самоходного модуля по отношению к опорному самоходному модулю в реальном времени, а управляющее устройство дополнительно соединено с навигационным модулем с возможностью приема определенных пространственных координат и дополнительно выполнено с обеспечением возможности управляемого изменения пространственной ориентации по отношению к корпусу самоходного модуля, формы или длины по меньшей мере одной из указанных ножек в зависимости от указанных принятых пространственных координат для корректировки положения указанного самоходного модуля.
19. Самоходный модуль по п. 1, в котором корпус выполнен сферическим или шарообразным.
20. Самоходный модуль по п. 1, в котором по меньшей мере одна из ножек самоходного модуля выполнена с возможностью электрического соединения с ножкой другого самоходного модуля или корпусом другого самоходного модуля с обеспечением возможности передачи заряда и/или управляющих сигналов другому самоходному модулю.
21. Самоходный модуль по п. 1, в котором корпус самоходного модуля содержит внешний шарообразный или сферический корпус и внутренний шарообразный или сферический корпус, установленный внутри внешнего корпуса, ножки соединены с внутренним корпусом и проходят через внешний корпус, при этом управляющее устройство, соединенное по меньшей мере с одной из указанных ножек выполнено с возможностью управляемого изменения ее пространственной ориентации по отношению к указанному корпусу в области поверхности внутреннего корпуса и/или в области поверхности внешнего корпуса.
22. Самоходный модуль по п. 21, в котором внутренний и/или внешний корпус выполнен из эластичного материала, обеспечивающего возможность изменения формы внутреннего и/или внешнего корпуса при перемещении самоходного модуля соответственно.
23. Самоходная система, содержащая:
два или более самоходных модулей по любому из пп. 1-22, введенных во взаимодействие друг с другом с использованием двух и более смежных ножек одного самоходного модуля и одной или более ножек другого самоходного модуля из взаимодействующих самоходных модулей.
24. Самоходная система по п. 24, в которой корпус по меньшей мере одного из указанных введенных во взаимодействие друг с другом самоходных модулей снабжен по меньшей мере одним движителем, а управляющее устройство одного из указанных введенных во взаимодействие друг с другом самоходных модулей дополнительно соединено с указанным по меньшей мере одним движителем с обеспечением возможности приведения его в действие для перемещения указанной самоходной системы.
25. Самоходная система по п. 23, в которой в корпусе по меньшей мере одного из указанных введенных во взаимодействие друг с другом самоходных модулей размещен независимый подвижный элемент, а управляющее устройство одного из указанных введенных во взаимодействие друг с другом самоходных модулей дополнительно соединен с указанным независимым подвижным элементом с обеспечением возможности его перемещения внутри указанного корпуса для перемещения указанной самоходной системы.
26. Самоходная система по п. 23, в которой в корпусе по меньшей мере одного из указанных введенных во взаимодействие друг с другом самоходных модулей закреплен независимый подвижный элемент, а управляющее устройство одного из указанных введенных во взаимодействие друг с другом самоходных модулей дополнительно соединен с указанным независимым подвижным элементом с обеспечением возможности его взаимодействия с указанным корпусом для перемещения указанной самоходной системы.
27. Самоходная система по любому из пп. 23-26, в которой указанные введенные во взаимодействие друг с другом самоходные модули образуют подвижную шарообразную конструкцию.
28. Самоходная система по п. 23, в которой по меньшей мере одна из ножек каждого самоходного модуля выполнена с возможностью электрического соединения с ножкой другого самоходного модуля или корпусом другого самоходного модуля с обеспечением возможности передачи заряда и/или управляющих сигналов другому самоходному модулю, при этом система выполнена с возможностью формирования электрического соединения с источником питания и/или потребителем посредством самоходных модулей, электрически соединенных между собой соответствующими ножками.
29. Самоходная система по п. 23, в которой самоходные модули выполнены с возможностью формирования заданного трехмерного объекта посредством взаимного перемещения и введения во взаимодействие множества самоходных модулей друг с другом посредством ножек соответствующих самоходных модулей.
| US 2006101547 A1, 11.05.2006 | |||
| US 2011196558 A1, 11.08.2011 | |||
| JP 2016074060 A, 12.05.2016 | |||
| CN 201120914 Y, 24.09.2008 | |||
| US 2003208303 A1, 06.11.2003 | |||
| ШАГАЮЩИЙ ТРАНСПОРТНЫЙ МЕХАНИЗМ | 1996 |
|
RU2092367C1 |
| Электромагнитный схват | 1986 |
|
SU1355484A1 |
| CN 110667722 A, 10.01.2020 | |||
| US 5361186 A, 01.11.1994. | |||

