ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к транспортной технике, в частности к средствам для перемещения полезной нагрузки, а именно к воздушным транспортным средствам.
УРОВЕНЬ ТЕХНИКИ
В настоящее время для транспортировки или доставки полезной нагрузки разработано множество различных автоматизированных или полуавтоматизированных воздушных транспортных средств, способных совершать перемещение по воздуху или летать с использованием летательных аппаратов, соединенных с корпусом таких воздушных транспортных средств и выполненных с возможностью перемещения по воздуху полезной нагрузки (например, человека, животного, любого объекта живого мира, товара, изделия, любого объекта неживого мира или т.п.), размещенной в таком корпусе или на нем. Однако несмотря на то, что современные автоматизированные или полуавтоматизированные воздушные транспортные средства могут относительно быстро летать или совершать перемещение по воздуху, они имеют существенный недостаток, заключающийся в невозможности стабилизации пространственного положения корпуса таких воздушных транспортных средств при их перемещении по воздуху или во время их полета.
Следовательно, ввиду по меньшей мере сформулированного выше недостатка современных воздушных транспортных средств, способных совершать перемещение по воздуху или летать с использованием летательных аппаратов, соединенных с корпусом таких воздушных транспортных средств, разработка усовершенствованных воздушных транспортных средств является актуальной задачей.
В частности, в патенте США № 10860115 (US 10860115), опубликованном 08 декабря 2020 года, описано воздушное транспортное средство, содержащее корпус, снабженный воздушным движителем, выполненным с возможностью управляемого изменения его местоположения на указанном корпусе для изменения направления перемещения по воздуху или направления полета воздушного транспортного средства.
Следует отметить, что в воздушном транспортном средстве, раскрытом в US 10860115, также не решен сформулированный выше недостаток, заключающийся в невозможности стабилизации пространственного положения корпуса такого воздушного транспортного средства при его перемещении по воздуху или во время его полета. В частности, при изменении местоположения воздушного движителя на корпусе воздушного транспортного средства при перемещении воздушного транспортного средства по воздуху или во время полета воздушного транспортного средства происходит резкое или скачкообразное изменение пространственного положения такого воздушного транспортного средства, что может привести к возникновению аварийной ситуации, в которую может попасть такое воздушное транспортное средство.
Таким образом, очевидна потребность в дальнейшем совершенствовании известных воздушных транспортных средств, в частности для обеспечения возможности стабилизации пространственного положения корпуса такого воздушного транспортного средства при его перемещении по воздуху или во время его полета.
Следовательно, основная техническая проблема, решаемая настоящим изобретением, состоит в создании воздушных транспортных средств, в каждом из которых по меньшей мере частично устранен по меньшей мере обозначенный выше недостаток известного воздушного транспортного средства, заключающийся в невозможности стабилизации пространственного положения корпуса воздушного транспортного средства при его перемещении по воздуху или во время его полета.
Дополнительная техническая проблема, решаемая настоящим изобретением, состоит в оптимизации расположения воздушных движителей относительно корпуса воздушного транспортного средства в различных режимах полета и в режимах посадки, взлета и стоянки. Поскольку в известных решениях, например, в патенте США US 8733690, опубликованном 27.05.2014, раскрыто транспортное средство, в котором воздушные движители выполнены с возможностью поворота относительно корпуса воздушного транспортного средства и перехода из вертикального в горизонтальное положение при взлете. При этом, распределение воздушных движителей относительно корпуса воздушного транспортного средства и положение воздушных движителей друг относительно друга остается прежним, что не позволяет существенным образом стабилизировать пространственное положение корпуса воздушного транспортного средства в полете, а также изменить летные характеристики воздушного транспортного средства в полете. Также общей задачей заявляемого изобретения может являться расширение арсенала транспортных средств, способных летать или совершать перемещение по воздуху.
РАСКРЫТИЕ
Задача настоящего изобретения состоит в создании воздушных транспортных средств, решающих каждое по меньшей мере обозначенную выше основную техническую проблему известного уровня техники.
Еще одна задача настоящего изобретения состоит в создании альтернативных воздушных транспортных средств по отношению к известным в уровне техники воздушным транспортным средствам.
Другой задачей настоящего изобретения является оптимизация расположения воздушных движителей относительно корпуса воздушного транспортного средства и/или воздушных движителей друг относительно друга в различных режимах полета и в режимах посадки, взлета и стоянки. Еще одной задачей является обеспечение возможности изменения летные характеристики воздушного транспортного средства в полете. В частности, к таким летным характеристикам может относиться маневренность, грузоподъемность, скорость, дальность полета. Дальность полета может обеспечиваться за счет обеспечения возможности перераспределения и/или замены отдельных летательных аппаратов на корпусе воздушного транспортного средства в полете.
Каждая из поставленных задач решена в первом аспекте настоящего изобретения благодаря тому, что предложенное воздушное транспортное средство содержит: (i) корпус, выполненный с возможностью соединения с ним двух или более летательных аппаратов с обеспечением возможности изменения положений присоединенных летательных аппаратов на корпусе транспортного средства по отношению друг к другу; и (ii) модуль управления, выполненный с возможностью установления связи по меньшей мере с одним из указанных присоединенных летательных аппаратов с обеспечением возможности его управляемого перемещения по корпусу транспортного средства по отношению к другому летательному аппарату из летательных аппаратов, которыми снабжен корпус транспортного средства.
Кроме того, каждая из поставленных задач решена и во втором аспекте настоящего изобретения благодаря тому, что предложенное воздушное транспортное средство содержит: (i) корпус, снабженный двумя или более летательными аппаратами, соединенными с указанным корпусом с обеспечением возможности изменения своих положений на корпусе транспортного средства по отношению друг к другу; и (ii) модуль управления, выполненный с возможностью управления по меньшей мере одним из указанных летательных аппаратов с обеспечением возможности его перемещения по корпусу транспортного средства по отношению к другому летательному аппарату из указанных летательных аппаратов.
Вышеописанные первый и второй аспекты настоящего изобретения обеспечивают каждый технический результат, заключающийся в возможности регулирования по меньшей мере одной из летных характеристик воздушного транспортного средства при перемещении воздушного транспортного средства по воздуху или полете воздушного транспортного средства. В частности, возможность регулирования по меньшей мере одной из летных характеристик воздушного транспортного средства при перемещении этого воздушного транспортного средства по воздуху или во время полета этого воздушного транспортного средства обеспечена благодаря наличию двух или более летательных аппаратов, соединенных с корпусом воздушного транспортного средства, и возможности перемещения одного или более из указанных летательных аппаратов по корпусу по отношению к другому летательному аппарату из указанных летательных аппаратов.
Кроме того, вышеописанные первый и второй аспекты настоящего изобретения обеспечивают каждый дополнительный технический результат, заключающийся в улучшении стабилизации корпуса воздушного транспортного средства в пространстве при перемещении воздушного транспортного средства по воздуху или полете воздушного транспортного средства. В частности, улучшенная стабилизация корпуса воздушного транспортного средства в пространстве при перемещении воздушного транспортного средства по воздуху или полете воздушного транспортного средства обеспечена благодаря наличию двух или более летательных аппаратов, соединенных с корпусом воздушного транспортного средства, и возможности перемещения одного или более из указанных летательных аппаратов по корпусу по отношению к другому летательному аппарату из указанных летательных аппаратов.
Кроме того, вышеописанные первый и второй аспекты настоящего изобретения обеспечивают каждый еще один дополнительный технический результат, заключающийся в расширении арсенала транспортных средств, способных совершать перемещение по воздуху или летать, в частности в создании более универсальных транспортных средств, способных совершать перемещение по воздуху или летать.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прилагаемые чертежи, которые приведены для обеспечения лучшего понимания сущности настоящего изобретения, составляют часть настоящего документа и включены в него для иллюстрации нижеописанных вариантов реализации и аспектов настоящего изобретения. Прилагаемые чертежи в сочетании с приведенным ниже описанием служат для пояснения сущности настоящего изобретения.
На чертежах:
на фиг. 1 показан один из иллюстративных вариантов реализации воздушного транспортного средства согласно настоящему изобретению и показан один из примеров процесса изменения положений летательных аппаратов на корпусе воздушного транспортного средства по отношению друг к другу;
на фиг. 2 показан еще один иллюстративный вариант реализации воздушного транспортного средства согласно настоящему изобретению и показан один из примеров процесса изменения положений летательных аппаратов на корпусе воздушного транспортного средства по отношению друг к другу;
на фиг. 3 показан еще один иллюстративный вариант реализации воздушного транспортного средства согласно настоящему изобретению и показан один из примеров процесса изменения положений летательных аппаратов на корпусе воздушного транспортного средства по отношению друг к другу;
на фиг. 4 показан еще один иллюстративный вариант реализации воздушного транспортного средства согласно настоящему изобретению и показан один из примеров процесса изменения положений летательных аппаратов на корпусе воздушного транспортного средства по отношению друг к другу;
на фиг. 5 показан еще один иллюстративный вариант реализации воздушного транспортного средства согласно настоящему изобретению и показан один из примеров процесса изменения положений летательных аппаратов на корпусе воздушного транспортного средства по отношению друг к другу.
ОСУЩЕСТВЛЕНИЕ
Ниже со ссылкой на прилагаемые чертежи описаны некоторые примеры возможных вариантов реализации настоящего изобретения, при этом не следует считать, что приведенное ниже описание определяет или ограничивает объем настоящего изобретения.
В приведенном ниже описании хорошо известные функции или конструкции не описаны подробно, поскольку это может завуалировать неважными сведениями сущность настоящего изобретения.
Следует понимать, что в приведенном далее описании термины, такие как «первый», «второй», «верхний», «нижний», «боковой», «передний», «задний» и т.п., использованы исключительно для удобства, при этом их не следует толковать как ограничительные термины. В частности, в контексте настоящего изобретения, если в описании настоящего документа явно не указано иное, термины «первый», «второй», «третий» или т.п. использованы для того, чтобы отличать друг от друга элементы, компоненты, части, узлы, модули, блоки, варианты реализации или т.п., к которым они относятся, а не для целей описания какой-либо конкретной взаимосвязи между ними.
Следует понимать при упоминании объекта в единственном числе возможно и наличие множества таких объектов и наоборот, если явно не указано иное или иное явным образом не следует из контекста настоящего документа.
Грамматические связи выражают любые или все альтернативные и объединенные сочетания связанных пунктов, предложений, слов и т.п., если только явно не указано иное или иное явным образом не следует из контекста. Таким образом следует понимать, что термин «или» в целом означает «и/или» и т.п.
Перечисление диапазонов значений в данном документе не является ограничением, поскольку ссылается в индивидуальном порядке на любые или все значения, попадающие в диапазон, если иное не указано в данном документе, при этом каждое отдельное значение в таком диапазоне включено в описание так, как если бы оно было отдельно приведено в данном документе.
Слова «приблизительно», «примерно» или т.п. в сочетании с числовым значением следует толковать как указывающие на возможное отклонение, которое по мнению специалиста в области техники обеспечивало бы надлежащее функционирование для решения необходимой задачи. Диапазоны значений и/или числовые значения приведены в данном документе исключительно в качестве примеров и не ограничивают объем описанных вариантов реализации.
Все примеры, приведенные в данном документе, или по меньшей мере часть из них, равно как и соответствующие слововыражения («например», «такой как», «в частности» или т.п.), по существу использованы для улучшения понимания сущности настоящего изобретения и для обеспечения полноты раскрытия настоящего изобретения, однако эти слововыражения не накладывают каких-либо ограничений на варианты реализации настоящего изобретения, для описания которых они использованы в настоящем документе, в частности не ограничивают практические варианты реализации элементов, компонентов, частей, узлов, модулей, блоков, устройств, средств и/или т.п., используемых для раскрытия особенностей конструкции и функционирования настоящего изобретения.
Термины и определения, примененные в описании данного документа
Термин «иллюстративный» означает неограничивающий пример, вариант или иллюстрацию. Аналогичным образом, термины «например» и «в качестве примера», использованные в данном документе, задают перечни из одного или более неограничивающих примеров, вариантов или иллюстраций. Как использовано в данном документе, схема «выполнена с возможностью» осуществлять функцию во всех случаях, когда эта схема содержит необходимые аппаратные средства и код (если какой-либо код необходим) для осуществления функции независимо от того, является ли исполнение этой функции заблокированным или запрещенным (например, посредством заданной оператором настройки, заводской настройки или т.п.).
В контексте настоящего изобретения термин «соответствие» и его производные (т.е. прилагательное, глагол, наречие) не обязательно означает точную согласованность или точное равенство в чем-либо, чему-либо или между чем-либо в каком-либо отношении, а может подразумевать отхождение или отклонение от указанного равенства в заданных пределах. Например, термин «соответствующие координаты», если из описания настоящего документа явно не следует иное, означает не только, что эти координаты могут быть точно равны друг другу или могут точно совпадать, но и подразумевает, что указанное равенство или совпадение координат может быть установлено с некоторой погрешностью (например, с погрешностью работы GPS-системы) или в рамках заданной географической области, окружающей точную географическую точку или область, на которую указывают эти координаты, или точное географическое место, на которое указывают эти координаты.
В контексте настоящего изобретения термин «летательный аппарат» (ЛА), если из описания настоящего документа явно не следует иное, относится к пилотируемому или беспилотному воздушному транспортному средству, которое выполнено с возможностью полета или которое способно осуществлять перемещение по воздуху в автоматическом режиме, т.е. без участия человека или внешних источников управления, или в полуавтоматическом режиме, т.е. получать по меньшей мере часть управляющих команд от человека (например, пилота, оператора или т.п.) или от внешнего источника управления (например, пульта управления, сервера управления, внешнего управляющего устройства или т.п.) по заданным каналам связи. Неограничивающими примерами ЛА являются различные мультироторные беспилотные летательные аппараты (например, мультикоптерные дроны), однороторные беспилотные летательные аппараты (например, беспилотный вертолет), гибридные беспилотные летательные аппараты (например, дроны с роторами и крыльями) и т.п.
В контексте настоящего изобретения термин «корпус», если из описания настоящего документа явно не следует иное, относится к каркасу, остову, оболочке, обшивке, фюзеляжу, несущей опоре или телу физического неживого объекта, каждый из которых может быть образован из одиночного опорного элемента или совокупности соединенных между собой опорных элементов, при этом тип, форма, габаритные размеры, конструктивные особенности и/или материал такого корпуса никак конкретно не ограничены.
В контексте настоящего изобретения термин «полезная нагрузка», если из описания настоящего документа явно не следует иное, относится к людям или живым существам (в частности, к людям или живым существам как к таковым, либо к людям или живым существам, помещенным в капсулу, кабину, жилой модуль, криомодуль, спасательный модуль, жилой отсек, жилой блок и т.п.) или к грузу (к грузу как таковому, либо к грузу, помещенному в ящики, коробки, упаковки, мешки, контейнеры, резервуары, сосуды, баки, канистры, вместилища, бочки, цистерны, баллоны, сосуды, резервуары, тары, бутылки, склянки, стеклотары, баллоны, боксы, модули хранения и т.п.), которые могут быть размещены в корпусе транспортного средства, выполняющего функцию носителя и предназначенного для доставки, перевозки или транспортировки людей, различных живых существ, различных неживых объектов и/или иных различных грузов по воздуху.
В контексте настоящего изобретения термин «модуль», если из описания настоящего документа явно не следует иное, относится к функциональному элементу или совокупности функциональных элементов устройства в виде детали, узла, блока или др. сборочной единицы, которая выполняет определенные технические функции, обеспечивающие выполнение функций устройства. Модуль в целом может быть реализован на практике с использованием сочетания известных конструктивных элементов, сочетания известных конструктивных элементов и известных аппаратных средств, сочетания известных конструктивных элементов и известных программно-аппаратных средств или сочетания известных аппаратных средств и известных программных средств. Так, например, модуль управления может быть реализован с использованием программно-аппаратных средств. В контексте настоящего изобретения модуль управления может представлять собой физическое устройство, аппарат или множеством модулей, выполненных с использованием аппаратного обеспечения, например, с помощью, интегральной схемы специального назначения (ASIC) или программируемой логической интегральной схемы (FPGA), или же комбинации аппаратного и программного обеспечения, например, с помощью микропроцессорной системы и набора инструкций, реализующих функциональные возможности модуля управления, которые (при выполнении) трансформируют микропроцессорную систему в устройство или систему специального назначения (например, автопилот). Кроме того, каждый из модулей, описанных в данном документе, или по меньшей мере один из них может быть реализован в виде комбинации аппаратного и программного обеспечения, при этом одни функциональные возможности, описанные в настоящем документе в отношении одного из модулей, могут быть реализованы только за счет аппаратного обеспечения, а другие функциональные возможности, описанные в настоящем документе в отношении того же самого модуля или иного модуля, могут быть реализованы путем использования аппаратного обеспечения в сочетании с программным обеспечением. Кроме того, в контексте настоящего изобретения модуль стыковки может быть выполнен с возможностью разъемного взаимодействия по меньшей мере с одним летательным аппаратом, при этом модуль стыковки может быть реализован с использованием сочетания известных конструктивных элементов, сочетания известных конструктивных элементов и аппаратных средств, сочетания конструктивных элементов и программно-аппаратных средств или сочетания аппаратных средств и программных средств.
В контексте настоящего изобретения термин «навигационная команда», если из описания настоящего документа явно не следует иное, относится к инструкции, направляемой летательным аппаратам, которые должны быть соединены с корпусом воздушного транспортного средства или которые были отсоединены от корпуса воздушного транспортного средства. Навигационные команды могут быть выданы или обеспечены системой управления перемещением летательных аппаратов в виде цифровых или аналоговых данных, инструкций, управляющих сигналов или т.п. Навигационные команды могут быть первоначально сгенерированы, без ограничения, автооператором, оператором (как локально, так и удаленно) и/или системой обхода препятствий. В частности, навигационные команды могут быть приняты, например, блоком управления для управления летательным аппаратом, входящим в состав летательного аппарата.
В контексте настоящего изобретения термин «ручное управление», если из описания настоящего документа явно не следует иное, относится не только к управлению исключительно с помощью рук человека, но и с помощью ног, пальцев, голоса, зрачков человека или их любого подходящего сочетания. Таким образом, в контексте настоящего изобретения термин «орган ручного управления» относится по меньшей мере к одному из следующего: кнопки, рычаги, джойстики, тумблеры, педали, сенсорный экран, сенсоры для управления жестами, сканеры для отслеживания движения зрачков, микрофон и/или т.п.
В контексте настоящего изобретения термин «зарядное устройство», если из описания настоящего документа явно не следует иное, относится к устройству для восполнения запаса хода летательного аппарата путем подзарядки его аккумуляторной батареи и/или путем восполнения его запаса топлива.
В контексте настоящего изобретения термин «база данных», если из описания настоящего документа явно не следует иное, подразумевает под собой любой структурированный набор данных, не зависящий от конкретной структуры, программного обеспечения по управлению базой данных, аппаратного обеспечения компьютера, на котором данные хранятся, используются или иным образом оказываются доступны для использования. База данных может находиться на том же оборудовании, выполняющем процесс, который сохраняет или использует информацию, хранящуюся в базе данных, или же она может находиться на отдельном оборудовании, например, выделенном сервере или на множестве серверов.
В контексте настоящего изобретения термин «парковочная станция», если из описания настоящего документа явно не следует иное, означает неподвижную или подвижную конструкцию, приспособленную для размещения, хранения и/или восполнения запаса хода (например, подзарядки) в ней летательных аппаратов.
В контексте настоящего изобретения термин «управляющее устройство» относится к вычислительному оборудованию, исполняющему компьютерную программу для обеспечения возможности получения запросов (например, от других вычислительных устройств) по сети связи, возможности выполнения или обработки таких запросов и/или возможности отправки таких запросов по сети связи (например, на другие вычислительные устройства). Вычислительное оборудование, исполняющее компьютерную программу, может представлять собой, без ограничения, один физический компьютер или одну физическую компьютерную систему. В контексте настоящего изобретения использование термина «управляющее устройство» не означает, что каждая вычислительная задача (например, полученные инструкции или команды) или любая иная конкретная задача будут получены, выполнены или послужат причиной выполнения одним и тем же управляющим устройством (т.е. одним и тем же программным и/или аппаратным обеспечением), что означает, что любое количество элементов программного обеспечения или аппаратного обеспечения может быть вовлечено в получение/отправку, выполнение или может послужить причиной для выполнения любой задачи или запроса, или последствий любой задачи или запроса, при этом все это программное и аппаратное обеспечение может быть реализовано в виде одного или нескольких управляющих устройств.
В контексте настоящего изобретения термин «сервер» относится к вычислительному оборудованию, исполняющему компьютерную программу для обеспечения возможности получения запросов (например, от других вычислительных устройств) по сети связи, возможности выполнения или обработки таких запросов и/или возможности отправки таких запросов по сети связи (например, на другие вычислительные устройства). Вычислительное оборудование, исполняющее компьютерную программу, может представлять собой, без ограничения, один физический компьютер или одну физическую компьютерную систему. В контексте настоящего изобретения использование термина «сервер» не означает, что каждая вычислительная задача (например, полученные инструкции или команды) или любая иная конкретная задача будут получены, выполнены или послужат причиной выполнения одним и тем же сервером (т.е. одним и тем же программным и/или аппаратным обеспечением), что означает, что любое количество элементов программного обеспечения или аппаратного обеспечения может быть вовлечено в получение/отправку, выполнение или может послужить причиной для выполнения любой задачи или запроса, или последствий любой задачи или запроса, при этом все это программное и аппаратное обеспечение может быть реализовано в виде одного или нескольких серверов.
Воздушное транспортное средство
На фиг. 1 показан один из иллюстративных вариантов реализации воздушного транспортного средства 500 согласно настоящему изобретению, при этом фиг. 1 также наглядно иллюстрирует один из примеров процесса изменения положений летательных аппаратов 200 на корпусе 100 воздушного транспортного средства по отношению друг к другу.
Как показано на фиг. 1, корпус 100 снабжен со своей внешней стороны двумя парами направляющих, каждая из которых образована из двух прямолинейных направляющих 300, и которые установлены на противоположных стенках корпуса 100, при этом прямолинейные направляющие 300 в каждой из двух пар направляющих корпуса 100 проходят по высоте корпуса 100 параллельно друг другу и расположены на заданном расстоянии друг от друга, задающем промежуток между указанными прямолинейными направляющими 300.
Кроме того, как показано на фиг. 1, на прямолинейных направляющих 300 в каждой из двух пар направляющих корпуса 100 установлены с возможностью управляемого перемещения по три летательных аппарата 200. Таким образом, по меньшей мере один или каждый из трех летательных аппаратов 200, установленных на прямолинейных направляющих 300 в каждой из двух пар направляющих корпуса 100, выполнен с возможностью управляемого прямолинейного перемещения по этим прямолинейным направляющим 300 с обеспечением возможности изменения своего положения по высоте корпуса 100 по отношению по меньшей мере к одному другому летательному аппарату из указанных трех летательных аппаратов 200 или остальным летательным аппаратам из указанных трех летательных аппаратов 200. Другими словами, летательные аппараты 200, установленные на прямолинейных направляющих 300 в каждой из двух пар направляющих корпуса 100, или по меньшей мере часть из них могут изменять свое положение на корпусе 100 по отношению друг к другу в результате перемещения по указанным прямолинейным направляющим 300.
Следует отметить, что корпус 100 в воздушном транспортном средстве 500 может быть выполнен с возможностью стыковки или соединения с ним двух или более летательных аппаратов 200 или может быть предварительно соединен с двумя или более летательными аппаратами 200 с обеспечением возможности перемещения по меньшей мере одного или каждого из указанных присоединенных летательных аппаратов 200 по одной или более пар направляющих, образованных каждая из двух направляющих 300, на заданное расстояние под управлением управляющего устройства транспортного средства 500.
Кроме того, как показано на фиг. 1, каждый из летательных аппаратов 200 содержит фюзеляж, каркас или корпус любого подходящего типа, который снабжен двумя движительными модулями, каждый из которых съемно установлен с одной из двух противоположных сторон корпуса указанного летательного аппарата 200 и в состав каждого из которых входят по одному воздушному движителю 250, содержащему один или более воздушных винтов. Таким образом, корпус каждого летательного аппарата 200, показанного на фиг. 1, снабжен со своей внешней стороны двумя воздушными движителями 250, которые, при приведении в действие таких воздушных движителей 250 или по меньшей мере части из них, обеспечивают возможность перемещения по воздуху или полета указанного летательного аппарата 200, который в свою очередь прикладывает тяговое усилие к корпусу 100, стремящееся поднять корпус 100 в воздух с последующим перемещением по воздуху или полетом транспортного средства 500. Следует отметить, что два или более из летательных аппаратов 200, которыми снабжен корпус 100, могут обеспечить возможность перемещения по воздуху или полета транспортного средства 500 в результате приложения своих тяговых усилий к корпусу 100.
Следует отметить, что тип, форма, геометрические размеры, материалы изготовления любого из летательных аппаратов 200, которыми снабжен корпус 100 в воздушном транспортном средстве 500, показанном на фиг. 1, ничем конкретно не ограничены в любых из вариантов реализации настоящего изобретения, описанных в данном документе.
Каждый из летательных аппаратов 200, которыми снабжен корпус 100 в воздушном транспортном средстве 500, показанном на фиг. 1, может быть реализован в виде любого подходящего беспилотного летательного аппарата (БПЛА), известного в уровне техники и выполненного с возможностью взлета в воздух, перемещения по воздуху (полета) и посадки в автоматическом режиме (т.е. в режиме автопилота, который не предусматривает какого-либо участия человека в процессе управления работой летательного аппарата и/или который не предусматривает получения летательным аппаратом каких-либо управляющих или навигационных команд от одного или более внешних источников управления) или в полуавтоматическом режиме (т.е. в режиме, который предусматривает возможность использования автопилота, а также возможность участия человека в процессе управления работой летательного аппарата и/или возможность получения летательным аппаратом каких-либо управляющих или навигационных команд от одного или более внешних источников управления). Следует отметить, что в случае работы в полуавтоматическом режиме любой из летательных аппаратов 200 может получать по меньшей мере часть управляющих команд от человека, например от пилота, оператора или т.п., или от внешнего источника управления, например, пульта управления, сервера управления, внешнего управляющего устройства или т.п.) по заданным каналам связи. В частности, неограничивающими примерами таких БПЛА, в виде одного из которых может быть выполнен любой из летательных аппаратов 200, являются различные мультироторные БПЛА (например, мультикоптерные дроны), однороторные БПЛА (например, беспилотные вертолеты), гибридные БПЛА (например, дроны с роторами и крыльями) или т.п.
В одном из вариантов реализации настоящего изобретения корпус по меньшей мере в одном или каждом из летательных аппаратов 200 может быть снабжен одним или более воздушными движителями 250 (например, одним, двумя, тремя, четырьмя, пятью, шестью, семью, восемью, девятью, десятью или более воздушными движителями 250), разъемно или жестко соединенными с корпусом указанного летательного аппарата 200 с обеспечением, при приведении в действие указанных воздушных движителей 200 или по меньшей мере части из них, возможности перемещения по воздуху или полета указанного летательного аппарата 200, при этом каждый из указанных воздушных движителей 250 может быть установлен с одной из сторон корпуса летательного аппарата 200 (например, со стороны верхней части корпуса летательного аппарата 200, со стороны нижней части корпуса летательного аппарата 200 или с одной из боковых сторон корпуса летательного аппарата 200). В одной из разновидностей данного варианта реализации настоящего изобретения по меньшей мере в одном или каждом из летательных аппаратов 200 все воздушные движители 250 или по меньшей мере часть из них могут быть установлены с одной и то же стороны корпуса указанного летательного аппарата 200 или с разных сторон корпуса указанного летательного аппарата 200 с обеспечением, при приведении в действие всех таких воздушных движителей 250 или по меньшей мере части из них, возможности перемещения по воздуху или полета указанного летательного аппарата 200.
В другом варианте реализации настоящего изобретения корпус по меньшей мере в одном или каждом из летательных аппаратов 200 может быть снабжен только одним движительным модулем, который может быть съемно установлен с одной из сторон указанного корпуса и в состав которого могут быть включены один или более воздушных движителей 250 (например, один, два, три, четыре, пять, шесть, семь, восемь, девять или десять воздушных движителей 250), содержащих каждый один или более воздушных винтов и установленных на заданном расстоянии друг от друга с обеспечением, при приведении в действие всех таких воздушных движителей 250 или по меньшей мере части из них, возможности перемещения по воздуху или полета указанного летательного аппарата 200.
Еще в одном варианте реализации настоящего изобретения корпус по меньшей мере в одном или каждом из летательных аппаратов 200 может быть снабжен двумя или более движительными модулями (например, двумя, тремя, четырьмя, пятью, шестью, семью, восемью, девятью, десятью или более движительными модулями), которые могут быть съемно установлены с разных сторон указанного корпуса и в состав каждого из которых могут входить по одному или более воздушных движителей 250 (например, один, два, три, четыре, пять, шесть, семь, восемь, девять или десять воздушных движителей 250), содержащих каждый один или более воздушных винтов и выполненных с обеспечением, при приведении в действие всех таких воздушных движителей 250 в указанных движительных модулях или по меньшей мере части из них, возможности перемещения по воздуху или полета указанного летательного аппарата 200.
В ином варианте реализации настоящего изобретения корпус по меньшей мере в одном или каждом из летательных аппаратов 200 может быть снабжен одним или более движительными модулями (например, одним, двумя, тремя, четырьмя, пятью, шестью, семью, восемью, девятью, десятью или более движительными модулями), которые могут быть съемно установлены по меньшей мере с одной из сторон указанного корпуса и в состав каждого из которых могут входить по одному или более воздушных движителей 250 (например, один, два, три, четыре, пять, шесть, семь, восемь, девять или десять воздушных движителей 250), содержащих каждый один или более воздушных винтов, и может быть дополнительно снабжен одним или более дополнительными воздушными движителями 250, соединенными с указанным корпусом, так что воздушные движители 250 в составе указанных движительных модулей и указанные дополнительные воздушные движители 250 могут быть выполнены с обеспечением, при приведении в действие всех из этих воздушных движителей 250 или по меньшей мере части из них, возможности перемещения по воздуху или полета указанного летательного аппарата 200.
В некотором варианте реализации настоящего изобретения корпус по меньшей мере в одном или каждом из летательных аппаратов 200 может быть снабжен исключительно двумя или более движительными модулями, по меньшей мере один из которых может быть полностью или по меньшей мере частично установлен в указанном корпусе с возможностью выдвижения из него.
В некотором другом варианте реализации настоящего изобретения корпус по меньшей мере в одном или каждом из летательных аппаратов 200 может быть снабжен исключительно двумя или более воздушными движителями 250, по меньшей мере один из которых может быть полностью или по меньшей мере частично установлен в указанном корпусе с возможностью выдвижения из него.
В некотором ином варианте реализации настоящего изобретения корпус по меньшей мере в одном или каждом из летательных аппаратов 200 может быть снабжен исключительно одним или более движительными модулями, снабженными каждый одним или более воздушными движителями 250 и выполненными каждый с возможностью развертывания при приведении их в действие.
В других вариантах реализации настоящего изобретения по меньшей мере один или каждый из воздушных движителей 250, которыми снабжен корпус по меньшей мере в одном или каждом из летательных аппаратов 200, может быть выполнен с обеспечением возможности перемещения по воздуху или полета указанного летательного аппарата 200 одновременно в вертикальной и горизонтальной плоскостях под управлением модуля управления указанного летательного аппарата 200.
В некоторых других вариантах реализации настоящего изобретения по меньшей мере один или каждый из воздушных движителей 250, которыми снабжен корпус по меньшей мере в одном или каждом из летательных аппаратов 200, может быть выполнен с возможностью поворота или возможностью изменения своей ориентации по отношению к указанному корпусу под управлением модуля управления указанного летательного аппарата 200 с обеспечением возможности перемещения по воздуху или полета этого летательного аппарата 200 в вертикальной плоскости или в горизонтальной плоскости в зависимости соответственно от угла поворота указанного воздушного движителя 250 или указанной ориентации воздушного движителя 250.
В иных вариантах реализации настоящего изобретения корпус 100 в воздушном транспортном средстве 500 может быть снабжен двумя или более летательными аппаратами 200 (например, двумя, тремя, четырьмя, пятью, шестью, семью, восемью, девятью, десятью или более летательными аппаратами 200), при этом по меньшей мере два из указанных летательных аппаратов 200 могут быть разъемно соединены между собой или разъемно состыкованы друг с другом с образованием составного летательного аппарата или функциональной группы летательных аппаратов.
В некоторых иных вариантах реализации настоящего изобретения по меньшей мере один или каждый из летательных аппаратов 200, которыми снабжен корпус 100, может представлять собой составной летательный аппарат, сформированный или образованный из двух или более состыкованных или соединенных между собой летательных аппаратов, при этом в состав каждого такого составного летательного аппарата могут входить летательные аппараты одного и того же типа и/или летательные аппараты разных типов. В одной из разновидностей таких вариантов реализации настоящего изобретения по меньшей мере один или каждый из летательных аппаратов 200, которыми снабжен корпус 100, может быть выполнен в виде двух или более составных аппаратов, при этом каждый такой составной аппарат может быть образован из двух или более состыкованных или соединенных между собой летательных аппаратов, имеющих один и тот же тип или разные типы, а типы летательных аппаратов, входящих в состав разных составных летательных аппаратов, могут (полностью или по меньшей мере частично) совпадать друг с другом или могут (полностью или по меньшей мере частично) отличаться друг от друга.
Как показано на фиг. 1, корпус 100 выполнен в виде кабины для пассажиров, снабженной смотровыми окнами и выполненной с возможностью размещения в ней людей (например, одного или более пассажиров и/или пилота), различных живых существ и/или различных грузов любого типа. Следует отметить, что корпус 100, снабженный летательными аппаратами 200, может быть использован для доставки, перевозки или транспортировки людей, различных живых существ и/или грузов различных типов (твердых, газообразных, жидких, текучих, сыпучих, вязких, радиоактивных, химических, и/или т.п.) по воздуху в целевое место, которое в свою очередь может находиться на поверхности земли (на суше), на поверхности подвижного или неподвижного наземного объекта (например, на наземной платформе, мосту, телевышке, кузове грузовика, крыше здания или т.п.), поверхности неподвижного водного объекта (например, на морской платформе, морском буе, понтоне или т.п.), поверхности подвижного водного объекта (например, на палубе корабля, баржи, теплохода, лайнера, катера или т.п.), поверхности неподвижного или подвижного воздушного объекта (например, на фюзеляже самолета, аэростате, или т.п.) или поверхности любых иных подходящих объектов, известных в уровне техники. Другими словами, корпус 100 в воздушном транспортном средстве 500 может выполнять функцию полезной нагрузки, которая может быть перемещена по воздуху с использованием летательных аппаратов 200.
В различных вариантах реализации настоящего изобретения корпус 100 в воздушном транспортном средстве 500 может быть дополнительно выполнен таким образом, что корпус 100 может обеспечивать возможность доставки, перевозки или транспортировки в нем людей, различных живых существ и/или грузов различных типов (твердых, газообразных, жидких, текучих, сыпучих, вязких, радиоактивных, химических, и/или т.п.) по земле (суше), по воздуху, по воде и/или под водой. Таким образом, в таких вариантах реализации настоящего изобретения корпус 100 в воздушном транспортном средстве 500 может быть выполнен в виде самостоятельного (автономного) транспортного средства, транспортировочного модуля или транспортного модуля, имеющего соответственно наземный тип, воздушный тип, надводный тип или подводный тип.
В различных иных вариантах реализации настоящего изобретения в воздушном транспортном средстве 500 во внутреннем пространстве корпуса 100 может быть установлено кресло для пилота, в котором может быть размещен пилот (не показан), способный управлять работой корпуса 100 в случае, когда этот корпус 100 представляет собой любое известное в уровне техники транспортное средство. В частности, в таких вариантах реализации настоящего изобретения для управления работой корпуса 100 пилот может использовать приборную панель и органы управления, которые также могут быть размещены внутри корпуса 100. Кроме того, в таких вариантах реализации настоящего изобретения во внутреннем пространстве корпуса 100 помимо пилота могут быть дополнительно размещены по меньшей мере один пассажир, по меньшей мере один предмет багажа пассажира и/или по меньшей мере один предмет груза, при этом указанные пилот, пассажиры, предметы груза и предметы багажа пассажиров могут быть размещены на соответствующих местах в общем внутреннем пространстве или могут быть размещены каждый в своей отдельной зоне, по меньшей мере частично ограниченной одной или более перегородками, или в своем отдельном отсеке, по меньшей мере частично ограниченном одной или более перегородками. В одной из разновидностей таких вариантов реализации настоящего изобретения кресло для пилота может быть размещено в кабине пилота, выполненной во внутреннем пространстве корпуса 100 и отделенной перегородкой от остальной части внутреннего пространства корпуса 100, которая в свою очередь может быть разделена другой перегородкой на пассажирский отсек, в котором могут быть установлены одно или более пассажирских кресел для размещения в них пассажиров, и на багажный или грузовой отсек, в котором может быть размещен груз (в частности, один или более предметов груза) и/или размещен пассажирский багаж (в частности, один или более предметов багажа пассажиров), при этом указанные предметы груза, предметы багажа пассажиров и/или пассажирские кресла могут быть размещены или закреплены на дне, полу и/или стенках корпуса 100. В другой разновидности таких вариантов реализации настоящего изобретения в пассажирском отсеке в корпусе 100 вместо пассажирских кресел или в дополнение к ним могут быть предусмотрены: (i) поручни, установленные на боковых стенках, полу и/или потолке корпуса 100 для размещения пассажиров в любом положении в корпусе 100, например сидя или стоя на полу во внутреннем пространстве корпуса 100; (ii) кушетки, кровати или скамейки, закрепленные на полу, стенках и/или потолке корпуса 100 для размещения на них пассажиров в положении сидя, стоя и/или лежа; (iii) специализированные места для размещения инвалидов в положении сидя, стоя и/или лежа; (iv) специализированные места для размещения инвалидных колясок, используемых людьми с инвалидностью; (v) специализированные места для размещения детских колясок, используемых малолетними детьми; (v) специализированные места для размещения детских люлек, используемых младенцами, и (при необходимости) специализированные места для сопровождающих; и/или (vi) специализированные места для размещения медицинских каталок для транспортировки больных, используемых лежачими больными. Следует отметить, что количество пассажиров в пассажирском отсеке в корпусе 100 может составлять от одного человека до нескольких десятков или даже сотен человек без введения каких-либо ограничений, при этом указанное количество пассажиров по сути ограничено лишь площадью пассажирского отсека в пределах внутреннего пространства корпуса 100. Еще в одной разновидности таких вариантов реализации настоящего изобретения в грузовом отсеке корпуса 100 может быть предусмотрена не только возможность размещения груза и/или пассажирского багажа на полу корпуса 100, но и возможность их закрепления в грузовом отсеке корпуса 100 с помощью стандартных крепежных средств, известных в уровне технике, при этом в качестве дополнения в грузовом отсеке корпуса 100 могут быть предусмотрены полки, подвесы, ящики и прочие несущие средства, закрепленные на полу, потолке и/или боковых стенках корпуса 100 и позволяющие размещать дополнительные предметы груза и/или предметы багажа пассажиров в грузовом отсеке корпуса 100. В иной разновидности таких вариантов реализации настоящего изобретения места для пассажирского багажа, в том числе полки, подвесы, ящики и прочие несущие средства для размещения предметов багажа пассажиров, могут быть предусмотрены только в пассажирском отсеке корпуса 100 в дополнение к вышеописанным вариантам средств для размещения пассажиров в указанном пассажирском отсеке. Для специалиста в данной области техники должно быть очевидно, что предметы груза и/или предметы багажа пассажиров могут быть по меньшей мере частично закреплены или зафиксированы и с наружной стороны корпуса 100 с использованием подходящих крепежных средств, известных в уровне техники (например, с помощью специального навесного оборудования закрытого типа, используемого в самолетах, автомобилях, мотоциклах, вертолетах, велосипедах или любых иных транспортных средствах, известных в уровне техники). Следует отметить, что вышеописанные кабина пилота, пассажирский отсек и грузовой отсек в корпусе 100 могут быть выполнены в целом аналогично соответствующим отсекам самолетов, вертолетов, автобусов, автомобилей, кораблей, катеров или любых иных подходящих транспортных средств, известных в уровне техники.
В различных других вариантах реализации настоящего изобретения кресло для пилота может быть размещено в кабине пилота во внутреннем пространстве корпуса 100, отделенной перегородкой от остальной части внутреннего пространства корпуса 100, в которой в свою очередь на дне, стенке и/или полу корпуса 100 могут быть размещены или закреплены пассажиры (например, в пассажирских креслах), предметы груза и предметы багажа пассажиров. Кроме того, возможен вариант реализации настоящего изобретения, в котором во внутреннем пространстве корпуса 100 могут быть размещены только пилот и пассажиры; возможен вариант реализации настоящего изобретения, в котором во внутреннем пространстве корпуса 100 могут быть размещены только пилот и груз; возможен вариант реализации настоящего изобретения, в котором во внутреннем пространстве корпуса 100 могут быть размещены только пассажиры и груз; возможен вариант реализации настоящего изобретения, в котором во внутреннем пространстве корпуса 100 могут быть размещены только пассажиры; возможен вариант реализации настоящего изобретения, в котором во внутреннем пространстве корпуса 100 может быть размещен только пилот в кресле пилота; и возможен вариант реализации настоящего изобретения, в котором во внутреннем пространстве корпуса 100 может быть размещен только груз.
Следует отметить, в вариантах реализации настоящего изобретения, в которых во внутреннем пространстве корпуса 100, ограниченном стенками корпуса 100 с его внутренней стороны, могут быть установлены органы управления (не показаны), эти органы управления корпуса 100 по сути могут обеспечивать возможность управления корпусом 100 в полуавтоматическом режиме (т.е. сочетание ручного управления с помощью пилота и автоматического управления с помощью автопилота) и могут обеспечивать возможность ручного ввода пилотом, находящимся в кресле для пилота и отслеживающим показания приборов на приборной панели, по меньшей мере одной управляющей команды в случае, когда корпус 100 представляет собой любое известное в уровне техники транспортное средство. Органы управления корпуса 100 должны быть соединены с возможностью обмена данными с нижеописанным управляющим устройством (не показано), входящим в состав транспортного средства 500, с обеспечением возможности выдачи каждой из указанных управляющих команд пилота в управляющее устройство транспортного средства 500, при этом некоторые из указанных управляющих команд пилота могут по сути заменять соответствующие управляющие команды управляющего устройства транспортного средства 500, генерируемые управляющим устройством транспортного средства 500 при управлении таким корпусом 100 в автоматическом режиме (т.е. в режиме автопилота).
В некоторых вариантах реализации настоящего изобретения, в которых корпус 100 может представлять собой любое известное в уровне техники транспортное средство, может и не быть предусмотрено участие пилота в процессе управления указанным корпусом 100, в связи с чем вышеописанные приборная панель, органы управления и кресло для пилота могут и отсутствовать во внутреннем пространстве корпуса 100, а управление таким корпусом 100 может быть реализовано фактически полностью в автоматическом режиме (т.е. в режиме автопилота) с помощью нижеописанного управляющего устройства транспортного средства 500, который в свою очередь может принимать управляющие команды от одного или более внешних управляющих устройств или внешних источников управляющих команд.
В иных вариантах реализации настоящего изобретения, в которых корпус 100 может представлять собой любое известное в уровне техники транспортное средство, вышеописанные органы управления и/или вышеописанная приборная панель в корпусе 100 могут входить в состав нижеописанного управляющего устройства транспортного средства 500, что позволяет этому управляющему устройству транспортного средства 500 одновременно обеспечивать возможность ручного управления таким корпусом 100 с помощью пилота и возможность автоматического управления таким корпусом 100 в режиме автопилота.
В других вариантах реализации настоящего изобретения корпус 100 может быть образован из двух или более разъемно состыкованных или соединенных между собой отдельных фюзеляжей, каркасов или корпусов (например, из двух, трех, четырех, пяти, шести, семи, восьми, девяти, десяти или более отдельных корпусов).
Кроме того, транспортное средство 500, показанное на фиг. 1, содержит управляющее устройство (не показано), установленное внутри корпуса 100 и выполненное с возможностью управления работой транспортного средства 500, в частности возможностью управления функциональными компонентами в составе транспортного средства 500, описанными в данном документе. Кроме того, управляющее устройство транспортного средства 500 может быть выполнено с возможностью установления связи по меньшей мере с одним или каждым из летательных аппаратов 200, состыкованных или соединенных с корпусом 100, с обеспечением возможности выдачи управляющих команд на модуль управления указанного летательного аппарата 200 для изменения рабочих параметров или режима работы указанного летательного аппарата 200, в частности для управляемого перемещения указанного летательного аппарата 200 по соответствующим прямолинейным направляющим 300 по отношению по меньшей мере к одному другому летательному аппарату из указанных летательных аппаратов 200, состыкованных или соединенных с корпусом 100 (т.е. управляемого перемещения по корпусу 100 по отношению по меньшей мере к одному из остальных летательных аппаратов 200, состыкованных или соединенных с корпусом 100).
Модуль управления, входящий в состав каждого или размещенный в корпусе каждого из летательных аппаратов 200, состыкованных или соединенных с корпусом 100, может быть выполнен с возможностью приема управляющих команд от управляющего устройства транспортного средства 500 с обеспечением, например, по меньшей мере одной из следующих возможностей: (i) возможности приведения в действие (активации) или включения по меньшей мере одного или каждого из воздушных винтов воздушных движителей 250, которыми снабжен корпус указанного летательного аппарата 200, (ii) возможности деактивации или выключения по меньшей мере одного или каждого из указанных воздушных винтов воздушных движителей 250, (iii) возможности задания или изменения скорости вращения по меньшей мере одного или каждого из указанных воздушных винтов воздушных движителей 250, (iv) возможности задания или изменения направления вращения по меньшей мере одного или каждого из указанных воздушных винтов воздушных движителей 250, (v) возможности задания или изменения скорости перемещения указанного летательного аппарата 200 по соответствующим прямолинейным направляющим 300, (vi) возможности задания или изменения направления перемещения указанного летательного аппарата 200 по соответствующим прямолинейным направляющим 300, (vii) возможности задания или изменения местоположения указанного летательного аппарата 200 на корпусе указанного летательного аппарата 200 по отношению по меньшей мере к одному другому летательному аппарату из летательных аппаратов 200, состыкованных или соединенных с корпусом 100, (viii) возможности направления по воздуху летательного аппарата 200 из парковочной станции (не показана), места стоянки или текущей области воздушного пространства в целевую область воздушного пространства, в которой предполагается состыковать или соединить этот летательный аппарат 200 с корпусом 100, (ix) возможности стыковки или соединения летательного аппарата 200 с корпусом 100, (х) возможности отстыковки или отсоединения летательного аппарата 200 от корпуса 100, (xi) возможности направления летательного аппарата 200, отстыкованного или отсоединенного от корпуса 100, на одну из парковочных станций (не показаны) для размещения в ней или на ней с обеспечением возможности хранения указанного летательного аппарата 200 в указанной парковочной станции и/или с обеспечением возможности восполнения запаса хода (зарядки) летательного аппарата 200, и (xii) возможности направления по воздуху летательного аппарата 200, отстыкованного или отсоединенного от корпуса 100 первого транспортного средства 500, ко второму транспортному средства 500 или в область пространства, в которой находится указанное второе транспортное средство 500.
Следует отметить, что по меньшей мере один из летальных аппаратов 200, которыми снабжен корпус 100, может быть предварительно соединен с корпусом 100 с возможностью перемещения по соответствующим прямолинейным направляющим 300, а по меньшей мере один другой летательный аппарат из указанных летательных аппаратов 200 может быть разъемно или неразъемно соединен или состыкован с корпусом 100 с возможностью перемещения по соответствующим прямолинейным направляющим 300 при нахождении транспортного средства 500 на месте стоянки (не показано) или в полете. Таким образом, один или более летательных аппаратов 200, которые должны быть разъемно или неразъемно соединены или состыкованы с корпусом 100, могут изначально находится каждый в заданном месте стоянки (не показано), в заданной парковочной станции (не показана) или в полете (например, заданном пространственном местоположении в воздухе, заданной области пространства в воздухе или в процессе перемещения по воздуху из одного пространственного местоположения в другое пространственное местоположение), при этом указанные летательные аппараты 200 могут быть направлены по воздуху в область нахождения корпуса 100 в ответ на соответствующие навигационные команды, принятые модулем управления каждого из указанных летательных аппаратов 200, и могут быть разъемно или неразъемно соединены или состыкованы с корпусом 100 по мере прилета в указанную область нахождения корпуса 100 в ответ на соответствующие управляющие команды, принятые модулем управления каждого из указанных летательных аппаратов 200. Следует также отметить, что по меньшей мере один из летальных аппаратов 200, которыми снабжен корпус 100, может быть отстыкован или отсоединен от корпуса 100 под управлением модуля управления указанного летательного аппарата 200, в частности в ответ на соответствующие управляющие команды, принятые указанным модулем управления летательного аппарата 200 от управляющего устройства транспортного средства 500, и может быть в дальнейшем направлен по воздуху в целевое место стоянки (не показано), парковочную станцию (не показана), целевое пространственное местоположение в воздухе или целевую область пространства в воздухе под управлением указанного модуля управления летательного аппарата 200, в частности в ответ на соответствующие навигационные команды, принятые указанным модулем управления летательного аппарата 200 от управляющего устройства транспортного средства 500. Кроме того, по меньшей мере один или каждый из летательных аппаратов 200, отстыкованных или отсоединенных от корпуса 100, может быть направлен по воздуху в заданную область пространства, в которой находится другое (второе) транспортное средство, выполненное аналогично транспортному средству 500, описанному в данном документе, под управлением модуля управления указанного летательного аппарата 200, в частности в ответ на соответствующие навигационные команды, принятые указанным модулем управления летательного аппарата 200 от управляющего устройства транспортного средства 500 или управляющего устройства указанного другого (второго) транспортного средства 500, и может быть неразъемно или разъемно пристыкован или присоединен к корпусу указанного другого (второго) транспортного средства 500 (в частности, по соответствующим направляющим, которыми может быть снабжен корпус этого другого (второго) транспортного средства 500) под управлением указанного модуля управления летательного аппарата 200, в частности в ответ на соответствующие навигационные команды, принятые указанным модулем управления летательного аппарата 200 от управляющего устройства транспортного средства 500 или управляющего устройства указанного другого (второго) транспортного средства 500.
Следует также отметить, что выдача управляющих команд от модуля управления летательного аппарата 200, состыкованного или соединенного с корпусом 100, по меньшей мере на один или каждый из воздушных движителей 250, которыми снабжен корпус летательного аппарата 200, для приведения в действие (активации) или включения указанного воздушного движителя 250 обеспечивает возможность полета или перемещения по воздуху летательного аппарата 200 и, следовательно, возможность полета или перемещения по воздуху транспортного средства 500, при этом одновременная работа всех воздушных движителей 250, которыми снабжен корпус летательного аппарата 200, или по меньшей мере их большей части повышает несущую способность летательного аппарата 200 и, следовательно, несущую способность транспортного средства 500.
В одном из вариантов реализации настоящего изобретения все воздушные движители 250 по меньшей мере в одном или каждом из летательных аппаратов 200, которыми снабжен корпус 100, или по меньшей мере часть из них могут быть приведены в действие (активированы) или включены последовательно или по существу одновременно с использованием модуля управления указанного летательного аппарата 200.
В другом варианте реализации настоящего изобретения все воздушные винты в воздушных движителях 250 по меньшей мере в одном или каждом из летательных аппаратов 200, которыми снабжен корпус 100, или по меньшей мере часть из них могут быть приведены в действие посредством модуля управления указанного летательного аппарата 200 с обеспечением возможности их вращения в одном и том же направлении или в разных направлениях.
Еще в одном варианте реализации настоящего изобретения по меньшей мере один или каждый из воздушных движителей 250 по меньшей мере в одном или каждом из летательных аппаратов 200, которыми снабжен корпус 100, может быть выполнен с возможностью поворота вокруг своей оси на заданный угол под управлением модуля управления указанного летательного аппарата 200.
В ином варианте реализации настоящего изобретения модуль управления по меньшей мере в одном или каждом из летательных аппаратов 200, которыми может быть снабжен корпус 100, может быть установлен снаружи корпуса 100.
Кроме того, в состав каждого из летательных аппаратов 200, которыми снабжен корпус 100, может входить по меньшей мере одно из следующих средств беспроводной связи: радиоантенна KB диапазона, радиоантенна УКВ диапазона, радиоантенна СВЧ диапазона, модуль оптической связи, модуль спутниковой связи полудуплекс/симплекс, модуль сотовой связи 2G/3G/4G/LTE/5G, модуль беспроводной связи, модуль проводной связи и т.п., что позволяет указанному летательному аппарату 200 принимать навигационные команды и/или управляющие команды от управляющего устройства транспортного средства 500 и, следовательно, позволяет управляющему устройству транспортного средства 500 управлять работой указанного летательного аппарата 200. Следует отметить, что навигационные команды и/или управляющие команды, принимаемые летательным аппаратом 200 от управляющего устройства транспортного средства 500 с использованием средств беспроводной связи летательного аппарата 200, передаются от указанных средств беспроводной связи летательного аппарата 200 на модуль управления летательного аппарата 200 для их обработки этим модулем управления летательного аппарата 200.
Кроме того, управляющее устройство транспортного средства 500 выполнено с возможностью получения и обработки данных (в том числе системных запросов) от по меньшей мере от одного из летательных аппаратов 200, которыми снабжен корпус 100 или которые должны быть присоединены или пристыкованы к корпусу 100, а также выполнено с возможностью генерирования управляющих инструкций/команд и/или с возможностью генерирования навигационных инструкций/команд на основании указанных полученных данных и результатов их обработки с обеспечением возможности выдачи или направления таких сгенерированных управляющих команд и/или навигационных команд на указанный по меньшей мере один летательный аппарат 100, в том числе в ответ на запрос указанного по меньшей мере одного летательного аппарата 200. Для выдачи навигационных команд и/или управляющих команд по меньшей мере на один из летательных аппаратов 200, от которых управляющим устройством транспортного средства 500 были получены соответствующие запросы, управляющее устройство транспортного средства 500 соединено, посредством сети беспроводной связи (не показана), с указанным по меньшей мере одним летательным аппаратом 200 с возможностью обмена с ним данными или выполнено с возможностью установления связи, посредством сети беспроводной связи (не показана), с указанным по меньшей мере одним летательным аппаратом 200 с возможностью обмена с ним данными.
В некотором ином варианте реализации настоящего изобретения модуль управления по меньшей мере в одном из летательных аппаратов 200, которыми снабжен корпус 100, может выполнять функции управляющего устройства транспортного средства 500, описанные в данном документе. Другими словами, в таком варианте реализации настоящего изобретения управляющее устройство транспортного средства 500 может быть выполнено в виде одиночного модуля управления, входящего в состав одного из летательных аппаратов 200, которыми снабжен корпус 100, или в виде совместно работающих модулей управления двух или более из летательных аппаратов 200, которыми снабжен корпус 100.
В некотором другом варианте реализации настоящего изобретения по меньшей мере один или каждый из летательных аппаратов 200, которыми снабжен корпус 100, может быть снабжен одним или более вышеописанных средств беспроводной связи, при этом средства беспроводной связи указанного летательного аппарата 200 могут быть выполнены с возможностью приема навигационных команд и/или управляющих команд от модуля управления другого летательного аппарата 200, который уже соединен или состыкован с корпусом 100 или который должен быть соединен или состыкован с корпусом 100. В одной из разновидностей данного варианта реализации настоящего изобретения навигационные команды и/или управляющие команды, выдаваемые модулем управления второго летательного аппарата 200 на модуль управления первого летательного аппарата 200, могут быть созданы или сгенерированы модулем управления второго летательного аппарата 200 в ответ на соответствующие навигационные команды и/или управляющие команды, принятые модулем управления второго летательного аппарата 200 от управляющего устройства транспортного средства 500.
В различных вариантах реализации настоящего изобретения по меньшей мере два из летательных аппаратов 200, которыми снабжен корпус 100, могут быть соединены между собой проводным способом с обеспечением возможности обмена данными друг с другом.
В различных иных вариантах реализации настоящего изобретения управляющее устройство транспортного средства 500 (не показано) может и не входить в состав транспортного средства 500, а может быть выполнено в виде внешнего источника управления, например может представлять собой одиночный сервер, который может быть выполнен в виде, например, сервера Dell™ PowerEdge™ с установленной на нем операционной системой Ubuntu Server или Windows Server.
В некоторых вариантах реализации настоящего изобретения управляющее устройство транспортного средства 500 может иметь или может получать доступ по меньшей мере к одной удаленной или внешней базе данных (не показана) по сети связи (не показана) или иным (проводным или беспроводным) способом, либо может иметь или получать доступ по меньшей мере к одной локальной базе данных, хранящейся на запоминающем устройстве (не показано) или в памяти (не показана), входящей в состав такого управляющего устройства транспортного средства 500.
В различных других вариантах реализации настоящего изобретения протоколы передачи данных и/или технические средства, используемые для передачи данных или обмена данными между управляющим устройством транспортного средства 500 и летательными аппаратами 200, могут по меньшей мере частично отличаться друг от друга и/или могут по меньшей мере частично совпадать друг с другом. Кроме того, для передачи данных или обмена данными между управляющим устройством транспортного средства 500 и по меньшей мере одним из летательных аппаратов 200 могут быть одновременно использованы один или более стандартных протоколов связи и соответствующих стандартных технических средств связи.
В отдельных вариантах реализации настоящего изобретения управляющее устройство транспортного средства 500 может быть выполнено с возможностью организации безопасности при полете или перемещении по воздуху транспортного средства 500.
Согласно одному из вариантов реализации настоящего изобретения, управляющее устройство транспортного средства 500 может представлять собой любое другое подходящее аппаратное обеспечение, прикладное программное обеспечение, системное программное обеспечение или их любую комбинацию.
Согласно другому варианту реализации настоящего изобретения, функции управляющего устройства транспортного средства 500 могут быть разделены между несколькими компьютерными или вычислительными устройствами, например, могут быть реализованы с помощью нескольких серверов, соединенных между собой по сети связи с возможностью взаимного обмена данными.
Согласно еще одному варианту реализации настоящего изобретения, функции управляющего устройства транспортного средства 500 может выполнять (i) модуль управления одного из летательных аппаратов 200, которыми снабжен корпус 100 и/или которые должны быть пристыкованы или присоединены к корпусу 100, (ii) группа или совокупность модулей управления по меньшей мере части из летательных аппаратов 200, которыми снабжен корпус 100 и/или которые должны быть пристыкованы или присоединены к корпусу 100, или (iii) любое иное подходящее вычислительное устройство, выполненное с возможностью генерирования управляющих команд и/или навигационных команд и дополнительно выполненное с возможностью выдачи указанных сгенерированных команд на модуль управления по меньшей мере одного или каждого из летательных аппаратов 200, которыми снабжен корпус 100 и/или которые должны быть пристыкованы или присоединены к корпусу 100.
Сеть связи (не показана), с которой по меньшей мере соединены с возможностью обмена данными по меньшей мере один или каждый из летательных аппаратов 200 которыми снабжен корпус 100 и/или которые должны быть пристыкованы или присоединены к корпусу 100, и управляющее устройство транспортного средства 500, по сути позволяет управляющему устройству транспортного средства 500 и указанного летательному аппарату 200 обмениваться друг с другом системными и/или рабочими данными, которые они используют для реализации своих функций или функциональных возможностей, описанных в данном документе, в режиме реального времени или в реальном времени. В качестве такой сети связи может быть использована, например, любая подходящая линия беспроводной связи, известная в уровне техники, например, линия связи на основе технологии беспроводной связи «Wi-Fi», линия связи на основе технологии беспроводной связи «2G», «3G», «4G» или «5G», сеть связи на основе технологии «LTE» и/или т.п.
Согласно иному варианту реализации настоящего изобретения, для осуществления взаимного обмена данными в режиме реального времени или в реальном времени управляющее устройство транспортного средства 500 и по меньшей мере один или каждый из летательных аппаратов 200 могут использовать две и более сетей беспроводной связи.
Кроме того, в воздушном транспортном средстве 500, показанном на фиг. 1, по меньшей мере один или каждый из летательных аппаратов 200, которыми снабжен корпус 100, содержит (собственный) встроенный источник питания (не показан), выполненный в виде аккумулятора, одной или более аккумуляторных батарей, генератора на основе двигателя внутреннего сгорания, генератора на основе водородного двигателя, генератора на основе одной или более солнечных батарей или генератора на основе любого иного подходящего источника энергии, известного в уровне техники, при этом такой встроенный источник питания может быть также выполнен с возможностью его подзарядки от внешнего источника питания (не показан) с использованием зарядного устройства (не показано) подходящего типа, подключенного к указанному внешнему источнику питания и выполненному с обеспечением возможности подключения к нему указанного встроенного источника питания. В частности, встроенный источник питания в каждом летательном аппарате 200 соединен, посредством схемы питания летательного аппарата 200, с модулем управления летательного аппарата 200 и любыми иными функциональными компонентами летательного аппарата 200, описанными в данном документе, с обеспечением возможности подачи на них питания или возможности их питания.
Согласно некоторому варианту реализации настоящего изобретения, встроенный источник питания по меньшей мере в одном или каждом из летательных аппаратов 200, которыми снабжен корпус 100 в воздушном транспортном средстве 500, показанном на фиг. 1, может быть заряжен беспроводным способом с использованием внешнего зарядного устройства (не показано), в основе работы которого может лежать, например, принцип электромагнитной индукции, известный специалисту в данной области техники.
Согласно некоторому другому варианту реализации настоящего изобретения, парковочная станция (не показана), в которую модуль управления по меньшей мере в одном или в каждом из летательных аппаратов 200, которыми снабжен корпус 100, может направлять указанный летательный аппарат 200, может быть снабжена одним или более зарядными устройствами (не показаны), электрически соединенными каждый по меньшей мере с одним из источников питания парковочной станции и обеспечивающими каждое возможность подключения к нему указанного летательного аппарата 200 по меньшей мере для частичной зарядки или по меньшей мере для частичного восполнения запаса хода указанного подключенного летательного аппарата 200, так что этот летательный аппарат 200 может перейти в состояние по меньшей мере с частично восполненным запасом хода или с полностью восполненным запасом хода, что позволяет снова использовать этот летательный аппарат 200 для перемещения транспортного средства 500 по воздуху.
Следует отметить, что в вариантах реализации настоящего изобретения, в которых по меньшей мере один из летательных аппаратов 200, отстыкованных от корпуса 100, может быть подключен к одному или более зарядных устройств парковочной станции для его зарядки или восполнения его запаса хода, каждый из источников питания парковочной станции в данном варианте реализации настоящего изобретения может представлять собой одну или более аккумуляторных батарей, генератор на основе двигателя внутреннего сгорания, генератор на основе водородного двигателя, солнечную батарею и любой иной подходящий источник энергии, известный в уровне техники. Следует также отметить, что по меньшей мере одно или каждое из зарядных устройств (не показаны) парковочной станции в таких вариантах реализации настоящего изобретения может представлять собой беспроводное зарядное устройство, проводное зарядное устройство или зарядную док-станцию. В качестве альтернативы по меньшей мере одно или каждое из зарядных устройств парковочной станции может быть выполнено, например, в виде устройства для подачи электрической энергии, устройства для подачи жидкого или газообразного топлива и/или т.п.В качестве еще одной альтернативы по меньшей мере одно или каждое из зарядных устройств парковочной станции может быть гидравлически соединено с насосом (не показан), соединенным гидравлической линией с резервуаром или емкостью (не показана) с топливом с возможностью забора этого топлива из указанной емкости, с обеспечением возможности подачи указанного забранного объема топлива в топливный бак летательного аппарата 200, гидравлически соединенный с работающим на топливе двигателем летательного аппарата 200, что позволяет восполнить запас хода летательного аппарата 200 (в частности, благодаря по меньшей мере частичному восполнению объема топлива в топливном баке летательного аппарата 200).
Согласно некоторому иному варианту реализации настоящего изобретения, модуль управления по меньшей мере в одном или каждом из летательных аппаратов 200 с восполненным запасом хода, может дополнительно обеспечивать возможность неразъемной или разъемной стыковки или соединения указанного летательного аппарата 200 с корпусом 100, относящимся к транспортному средству 500, при этом транспортное средство в течении указанного процесса стыковки может находиться в воздухе или на поверхности земли (или поверхности иного объекта, который в свою очередь может находиться на земле, на поверхности воды и/или в воздухе). В одной из разновидностей данного варианта реализации настоящего изобретения непосредственно самим процессом стыковки или разъемного соединения летательного аппарата 200 с восполненным запасом хода с корпусом 100 может управлять модуль управления летательного аппарата 200 или управляющее устройство транспортного средства 500, выдающее управляющие команды на модуль управления летательного аппарата 200. В другой разновидности данного варианта реализации настоящего изобретения летательный аппарат 200 с восполненным запасом хода может быть неразъемно или разъемно состыкован (соединен) по меньшей мере с корпусом 100 вручную или автоматически под управлением модуля управления летательного аппарата 200 или управляющего устройства транспортного средства 500, выдающего управляющие команды на модуль управления летательного аппарата 200.
Согласно различным вариантам реализации настоящего изобретения, при стыковке или соединении каждого летательного аппарата 200 с корпусом 100 он может быть дополнительно электрически соединен по меньшей мере с одним другим летательным аппаратом из летательных аппаратов 200, которыми уже снабжен корпус 100 в воздушном транспортном средстве 500, с образованием единой схемы питания (например, с использованием соединительного кабеля питания, который может быть подключен к схемам питания этих летательных аппаратов 200) и составного источника питания функциональной пары летательных аппаратов (например, такой составной источник питания может быть образован из аккумуляторных батарей этих двух летательных аппаратов), подающего питание или питающего все функциональные компоненты каждого из указанных электрически соединенных летательных аппаратов 200 по существу одновременно, так что подзарядка такого составного источника питания от внешнего источника питания (не показан) с использованием зарядного устройства (не показано) подходящего типа позволяет говорить о восполнении запаса хода функциональной пары летательных аппаратов (т.е. о восполнении запаса хода сразу обоих летательных аппаратов 200). Таким образом, запас хода функциональной пары летательных аппаратов, образованной из электрически соединенных между собой двух летательных аппаратов 200, может контролироваться модулем управления одного из указанных летательных аппаратов 200 или управляющим устройством транспортного средства 500 путем отслеживания состояния составного источника питания функциональной пары летательных аппаратов (например, отслеживания остаточного заряда составной аккумуляторной батареи функциональной пары летательных аппаратов). В одном из вариантов реализации настоящего изобретения составной источник питания функциональной пары летательных аппаратов, образованной из электрически соединенных между собой летательных аппаратов 200, может быть подзаряжен от двух или более внешних источников питания (не показаны) с использованием двух или более зарядных устройств (не показаны) подходящего типа, которые могут быть электрически соединены каждый с соответствующим одним из указанных внешних источников питания и каждый из которых может быть выполнен с обеспечением возможности подключения к нему одного или более из источников питания, входящих в состав указанного составного источника питания, так что такой составной источник питания может быть по сути подзаряжен путем параллельной подзарядки его отдельных источников питания.
Как показано на фиг. 1, воздушные движители 250 в летательных аппаратах 200, которыми снабжен корпус 100, предпочтительно ориентированы или установлены таким образом, что приведение в действие, посредством соответствующих модулей управления указанных летательных аппаратов 200, всех воздушных движителей 250 или по меньшей мере их части обеспечивает возможность полета или перемещения в воздухе транспортного средства 500 по существу в вертикальной плоскости. Следует отметить, что направление перемещения транспортного средства 500 в вертикальной плоскости (т.е. перемещение по направлению вертикально вниз для уменьшения высоты полета транспортного средства 500 или для осуществления приземления транспортного средства 500, либо перемещение по направлению вертикально вверх для увеличения высоты полета транспортного средства 500 или для осуществления взлета транспортного средства 500) под управлением модуля управления транспортного средства 500 по существу зависит от направления вращения лопастных винтов в конкретных воздушных движителях 250, приведенных в действие в летательных аппаратах 200, которыми снабжен корпус 100 в воздушном транспортном средстве 500, с использованием соответствующих модулей управления указанных летательных аппаратов 200. В одном из вариантов реализации настоящего изобретения лопастные винты воздушных движителей 250 в летательных аппаратах 200, которыми снабжен корпус 100, могут быть приведены в действие с обеспечением их вращения в одном и том же направлении или в разных направлениях в заданной последовательности (в частности, по одному или заданными группами) и/или на заданный период времени с использованием модулей управления указанных летательных аппаратов 200, что может обеспечить прямолинейную или криволинейную траекторию перемещения транспортного средства 500 в вертикальной плоскости.
Следует также отметить, что модуль управления каждым летательным аппаратом 200 приводит в действие требуемые воздушные движители 250 (т.е. все воздушные движители 250 или по меньшей мере часть из них) с обеспечением вращения лопастных винтов каждого из указанных приведенных в действие воздушных движителей 250 в одном из двух противоположных направлений для обеспечения возможности взлета транспортного средства 500, возможности посадки транспортного средства 500 и/или возможности перемещения по воздуху (полета) транспортного средства 500 по меньшей мере в одну целевую область пространства, заданную пространственными координатами.
Следует также отметить, что в случае, когда необходимо переместить транспортное средство 500 по воздуху с уменьшением высоты его полета, модули управления летательных аппаратов 200, которыми снабжен корпус 100, должны каждый приводить в действие соответствующие воздушные движители 250 с учетом собственного веса транспортного средства 500 и с учетом веса летательных аппаратов для исключения вероятности нежелательного падения транспортного средства 500, обеспечения возможности по существу равномерного или плавного сброса высоты полета транспортного средства 500 и/или обеспечения возможности по существу равномерного или плавного набора высоты полета транспортного средства 500. Таким образом, смещение или перемещение в воздухе транспортного средства 500 в своей вертикальной плоскости под управлением модуля управления транспортного средства 500 обеспечивает возможность позиционирования или изменения пространственного положения транспортного средства 500 в вертикальной плоскости по отношению к поверхности земли или поверхности иного объекта, который в свою очередь может находиться на земле (суше), в воздухе и/или на воде.
Согласно различным иным вариантам реализации настоящего изобретения, по меньшей мере часть из воздушных движителей 250 в летательных аппаратах 200, которыми снабжен корпус 100, могут быть ориентированы или установлены таким образом, что приведение в действие, посредством соответствующих модулей управления указанных летательных аппаратов 200, указанной части воздушных движителей 250 обеспечивает возможность полета транспортного средства 500 по существу в горизонтальной плоскости, в том числе возможность перемещения или смещения транспортного средства 500 в воздухе на заданное расстояние. Следует отметить, что направление перемещения транспортного средства 500 в горизонтальной плоскости (т.е. перемещение в воздухе в одну из боковых сторон с поддержанием высоты полета) под управлением модуля управления транспортного средства 500 по существу зависит от направления вращения лопастных винтов в указанной части воздушных движителей 250, приведенных в действие в летательных аппаратах 200, которыми снабжен корпус 100 в воздушном транспортном средстве 500, с использованием соответствующих модулей управления указанных летательных аппаратов 200, и/или от ориентации каждого из указанных приведенных в действие воздушных движителей 250 по отношению к соответствующему корпусу летательного аппарата 200.
Согласно различным другим вариантам реализации настоящего изобретения, корпус 100 может быть снабжен одной или более пар направляющих, образованных каждая из двух одинаковых прямолинейных или криволинейных направляющих 300, при этом направляющие 300 в каждой из указанных пар направляющих корпуса 100 могут быть выполнены с возможностью одновременного или последовательно перемещения по ним одного или более летательных аппаратов 200 (например, одного, двух, трех, четырех, пяти, шести, семи, восьми, девяти, десяти или более летательных аппаратов 200), которыми может быть снабжен корпус 100, под управлением управляющего устройства транспортного средства 500.
В одном из вариантов реализации настоящего изобретения направляющие 300 в разных парах направляющих, установленные на корпусе 110 или по меньшей мере частично в нем, или по меньшей мере часть из них могут быть соединены между собой с образованием одной или более составных направляющих (не показаны), по меньшей мере одна или каждая из которых может иметь в целом Х-образую форму, крестообразную форму, Н-образную форму или любую иную форму, похожую на любой известный в уровне техники символ, любую известную в уровне техники букву или геометрическую фигуру, любой известный в уровне техники объект живого или неживого мира, или т.п., при этом части указанной составной направляющей, соответствующих указанным направляющим 300, могут находиться с одной и той тоже стороны корпуса 100 или с разных сторон корпуса 100 (например, с двух или более сторон корпуса 100). В таком варианте реализации настоящего изобретения на составной направляющей могут быть установлены с возможностью прямолинейного или криволинейного перемещения один или более летательных аппаратов 200, работой которых управляет управляющее устройство транспортного средства 500.
Следует отметить, что форма, длина (протяженность) или иные геометрические размера, равно как и форма сечения и материал изготовления направляющих 300, описанных в данном документе, ничем конкретно не ограничены, при этом указанные параметры или характеристики направляющих 300 могут совпадать друг с другом или могут отличаться друг от друга.
Каждый из летательных аппаратов 200, которые должны быть соединены с корпусом 200, снабжен модулем стыковки (не показан), который выполнен с возможностью ввода в неразъемное или разъемное взаимодействие с соответствующими направляющими 300 при стыковке или соединении указанного летательного аппарата 200 с корпусом 100 под управлением модуля управления указанного летательного аппарата 200. Неограничивающими примерами модуля стыковки летательного аппарата 200 являются следующие крепежные или соединительные элементы, которыми должен быть снабжен корпус летательного аппарата 200 и которые могут входить в неразъемное или разъемное взаимодействие непосредственно с самими направляющими 300: различные подходящие механические соединительные или крепежные средства (кронштейны, захваты, крепежи, монтажные пазы, зацепы, крюки, защелки и т.д.), электромеханические средства под управлением модуля управления летательного аппарата 200 (например, электромеханические средства стыковки для стыковки с ответным пристыковываемым элементом, электромеханические средства захвата для захвата ответного захватываемого элемента, или т.п.), электромагнитные средства под управлением модуля управления летательного аппарата 200, магнитные средства, вакуумные захваты под управлением модуля управления летательного аппарата 200 и/или т.д.
В одном из вариантов реализации настоящего изобретения модуль стыковки каждого летательного аппарата 200 может представлять собой или может содержать крепежные или соединительные элементы, выполненные с возможностью неразъемного или разъемного взаимодействия с соответствующими ответными крепежными или соединительными элементами, выполненными в ответствующих стыковочных местах подвижных элементов (например, кареток), предварительно установленных или закрепленных на направляющих 300 в заданном количестве с возможностью перемещения по указанных направляющим 300, при этом неограничивающими примерами указанных ответных крепежных или соединительных элементов являются зацеп, крючок, скоба, ушко, зажим, защелка, электромеханический захват, магнитный захват и т.п.
В другом варианте реализации настоящего изобретения модуль стыковки каждого летательного аппарата 200 может представлять собой неподвижную крепежную или соединительную конструкцию, которая может быть выполнена с возможностью неразъемного или разъемного взаимодействия с соответствующими направляющими 300 при стыковке или соединении указанного летательного аппарата 200 с корпусом 100 под управлением модуля управления указанного летательного аппарата 200, при этом указанная соединительная конструкция может быть (i) по меньшей мере частично вделана или встроена в тело корпуса летательного аппарата 200 или (ii) закреплена с одной из внешних сторон корпуса летательного аппарата 200.
Еще в одном варианте реализации настоящего изобретения по меньшей мере две стороны корпуса в каждом летательном аппарате 200 могут быть снабжены каждая одним или более модулями стыковки летательного аппарата 200, каждый из которых выполнен с возможностью неразъемного или разъемного взаимодействия с соответствующими направляющими 300 при стыковке или соединении указанного летательного аппарата 200 с корпусом 100 под управлением модуля управления указанного летательного аппарата 200, что позволяет изменять сторону корпуса указанного летательного аппарата 200, которой он будет пристыкован или присоединен к корпусу 100, а также позволяет пристыковывать или присоединять указанный летательный аппарат сразу к двум или более корпусам транспортных средств, выполненным каждый по типу корпуса 100, описанного в данном документе. Таким образом, в одной из разновидностей данного варианта реализации настоящего изобретения по меньшей мере одна из стенок корпуса летательного аппарата 200, нижняя часть корпуса (например, пол, дно или днище) летательного аппарата 200 и/или верхняя часть корпуса (например, потолок или крыша) летательного аппарата 200 могут быть снабжены со своей внешней стороны одним или более модулями стыковки летательного аппарата 200.
В другом варианте реализации настоящего изобретения модуль стыковки в каждом летательном аппарате 200 может представлять собой подвижную крепежную или соединительную, которая может быть выполнена с возможностью неразъемного или разъемного взаимодействия с соответствующими направляющими 300 при стыковке или соединении указанного летательного аппарата 200 с корпусом 100 под управлением модуля управления указанного летательного аппарата 200, при этом такая крепежная или соединительная конструкция может быть выполнена с возможностью ее по меньшей мере частичного или полного развертывания, раскладывания или раздвижения под управлением модуля управления летательного аппарата 200 с обеспечением возможности ее возврата в свое первоначальное (исходное) состояние под управлением модуля управления летательного аппарата 200.
Еще в одном варианте реализации настоящего изобретения по меньшей мере одна или каждая из пар направляющих, которыми снабжен корпус 100 и каждая из которых образована из двух прямолинейных направляющих 300, может быть выполнена в виде одиночной прямолинейной или криволинейной направляющей (например, рельсом), выполненной с обеспечением возможности неразъемного или разъемного взаимодействия с ней по меньшей мере одного летательного аппарата 200 при стыковке или соединении указанного летательного аппарата 200 с корпусом 100 под управлением модуля управления указанного летательного аппарата 200.
В ином варианте реализации настоящего изобретения по меньшей мере одна из стенок корпуса летательного аппарата 200, нижняя часть корпуса (например, пол, дно или днище) летательного аппарата 200 и/или верхняя часть корпуса (например, потолок или крыша) летательного аппарата 200 могут быть снабжены со своей внешней стороны одним или более парами направляющих, образованных каждая из двух параллельно расположенных прямолинейных направляющих 300, или одной или более одиночных направляющих, выполненных каждая, например, в виде прямолинейного или криволинейного рельса.
Как показано на фиг. 1 сверху, летательные аппараты 200, состыкованные или соединенные с корпусом 100, размещены на направляющих 300 друг за другом или вплотную друг к другу (в том числе с образованием стопы). В одном из вариантов реализации настоящего изобретения два смежных или размещенных вплотную друг к другу летательных аппаратов из летательных аппаратов 200, состыкованных или соединенных с корпусом 100, могут быть скреплены или соединены между собой с образованием функциональной пары летательных аппаратов, выполненной с возможностью перемещения по направляющим 300 под управлением модуля управления одного из летательных аппаратов 200, образующих указанную функциональную пару летательных аппаратов, в том числе в ответ на управляющие команды управляющего устройства транспортного средства 500.
Как показано на фиг. 1 снизу, перед взлетом транспортного средства 500, перед посадкой транспортного средства 500 и/или в процессе перемещения по воздуху или полета транспортного средства 500 управляющее устройство транспортного средства 500 устанавливает связь с модулями управления летательных аппаратов 200, состыкованных или соединенных с корпусом 100, с обеспечением возможности по существу одновременного или последовательного (друг за другом через заданный период времени) перемещения указанных летательных аппаратов 200 по соответствующим направляющим 300, установленным на корпусе 100 с его внешней стороны, по отношению друг к другу с обеспечением размещения указанных перемещенных летательных аппаратов 200 на заданном расстоянии (в частности, на одинаковом или равном расстоянии) друг от друга по высоте корпуса 100. В частности, при одновременном или последовательном перемещении летательных аппаратов 200 по отношению друг к другу под управлением управляющего устройства транспортного средства 500 каждый из указанных перемещаемых летательных аппаратов 200 по сути совершает перемещение по корпусу 100 с использованием соответствующих направляющих 300 по отношению по меньшей мере к одному другому (референтному или опорному) летательному аппарату из летательных аппаратов 200, состыкованных или соединенных с корпусом 100. В одном из вариантов реализации настоящего изобретения управляющее устройство транспортного средства 500 может выдавать управляющие инструкции на модуль управления каждого из одного или более летательных аппаратов 200, состыкованных или соединенных с корпусом 100, с обеспечением возможности перемещения указанного летательного аппарата 200 по соответствующим направляющим 300 по отношению к одному или более других летательных аппаратов из летательных аппаратов 200, состыкованных или соединенных с корпусом 100, при этом указанные один или более других летательных аппаратов выполняют каждый функцию референтного или опорного летательного аппарата на корпусе 100 для указанного перемещаемого летательного аппарата 200. В одной из разновидностей данного варианта реализации настоящего изобретения под управлением управляющего устройства транспортного средства 500 по корпусу 100 с использованием соответствующих направляющих может быть перемещен по меньшей мере один или каждый из летательных аппаратов 200, состыкованных или соединенных с корпусом 100, при этом в качестве референтного или опорного летательного аппарата на корпусе 100 для указанного перемещаемого летательного аппарата 200 может быть использован любой один другой из остальных летательных аппаратов, входящих в состав указанных летательных аппаратов 200, состыкованных или соединенных с корпусом 100, или в качестве референтных или опорных летательных аппаратов на корпусе 100 могут быть использованы любые два или более других из указанных остальных летательных аппаратов 200. Следует отметить, что в данной разновидности варианта реализации настоящего изобретения для разных летательных аппаратов 200, перемещаемых по корпусу 100 с использованием соответствующих направляющих 300, в качестве референтного или опорного летательного аппарата на корпусе 100 может быть использован один и тот же или отдельный (отличный от других) летательный аппарат из летательных аппаратов 200, состыкованных или соединенных с корпусом 100. В другом варианте реализации настоящего изобретения управляющее устройство транспортного средства 500 может выдавать управляющие инструкции на модуль управления каждого из двух или более летательных аппаратов 200, состыкованных или соединенных с корпусом 100, с обеспечением возможности одновременного или совместного перемещения указанных летательных аппаратов 200 по соответствующим направляющим 300 (например, по одной и той же паре направляющих или по разным парам направляющих) по отношению к одному и тому же летательному аппарату 200 на корпусе 100, являющемуся референтным или опорным для указанного перемещаемого летательного аппарата 200.
Следует отметить, что перемещение по меньшей мере одного из летательных аппаратов 200, состыкованных или соединенных с корпусом 100, под управлением управляющего устройства транспортного средства 500 по корпусу 100 по отношению по меньшей мере к одному другому летательному аппарату из указанных летательных аппаратов 200 обеспечивает возможность изменения по меньшей мере одной из летных характеристик транспортного средства 500, показанного на фиг. 1, что в свою очередь позволяет транспортному средству 500 занять более сбалансированное или равновесное пространственное положение в воздухе.
Кроме того, как показано на фиг. 1, перед взлетом транспортного средства 500, перед посадкой транспортного средства 500 и/или в процессе перемещения по воздуху или полета транспортного средства 500 летательные аппараты 200, которыми снабжен корпус 100, могут быть размещены по меньшей мере с одной из сторон корпуса 100 на заданном расстоянии (в частности, на одинаковом или равном расстоянии) друг от друга по высоте корпуса 100 (см. нижнюю часть фиг. 1), а управляющее устройство транспортного средства 500 может установить связь с модулями управления указанных летательных аппаратов 200 с обеспечением возможности по существу одновременного или последовательного (друг за другом через заданный период времени) перемещения указанных летательных аппаратов 200 по направляющим 300, соответствующим указанной стороне корпуса 100, по отношению друг к другу или по отношению к корпусу 100 с обеспечением возможности их размещения друг под другом или вплотную друг с другом (см. верхнюю часть фиг. 1). В одном из вариантов реализации настоящего изобретения, управляющее устройство транспортного средства 500 может быть дополнительно выполнено с обеспечением возможности изменения расстояния между винтами винтовых движителей 250 в летательных аппаратах 200, размещенных друг под другом или вплотную друг к другу на направляющих 300 с одной из сторон корпуса 100.
Согласно одному из вариантов реализации настоящего изобретения, управляющее устройство транспортного средства 500 может обеспечивать возможность перемещения каждого летательного аппарата 200, который должен быть перемещен по корпусу 100 с использованием соответствующих направляющих 300, по отношению к одному или более референтных или опорных летательных аппаратов из летательных аппаратов 200, состыкованных или соединенных с корпусом 100, на заданное расстояние в соответствии с заданным маршрутом перемещения, соответствующим одной из заданных схем или моделей перемещения, которую управляющее устройство транспортного средства 500 может автоматически или полуавтоматически выбрать в зависимости от внешних условий (например температуры, давления, скорости ветра, погоды, ландшафта местности полета и т.п.), в зависимости от типа груза, размещенного в корпусе 100, в зависимости от распределения груза, размещенного в корпусе 100, во внутреннем пространстве корпуса 100, в зависимости от помех или мешающих объектов на пути следования транспортного средства 500 и/или т.п.
В некотором варианте реализации настоящего изобретения, управляющее устройство транспортного средства 500 может обеспечивать возможность перемещения одного или более из летательных аппаратов 200, которые должны быть перемещены по корпусу 100 с использованием соответствующих направляющих 300, по отношению по меньшей мере к одному другому летательному аппарату из указанных летательных аппаратов 200, выполняющему функцию референтного или опорного летательного аппарата на корпусе 100, таким образом, что указанные перемещенные летательные аппараты 200 оказываются размещенными на корпусе 100 по меньшей мере с двух его сторон.
В некотором другом варианте реализации настоящего изобретения, управляющее устройство транспортного средства 500 может обеспечивать возможность перемещения одного или более из летательных аппаратов 200, которые должны быть перемещены по корпусу 100 с использованием соответствующих направляющих 300, по отношению по меньшей мере к одному другому летательному аппарату из указанных летательных аппаратов 200, выполняющему функцию референтного или опорного летательного аппарата на корпусе 100, таким образом, что указанные перемещенные летательные аппараты 200 оказываются размещенными на корпусе 100 по меньшей мере в двух разных плоскостях корпуса 100.
В некотором ином варианте реализации настоящего изобретения, управляющее устройство транспортного средства 500 может обеспечивать возможность перемещения одного или более из летательных аппаратов 200, которые должны быть перемещены по корпусу 100 с использованием соответствующих направляющих 300, по отношению по меньшей мере к одному другому летательному аппарату из указанных летательных аппаратов 200, выполняющему функцию референтного или опорного летательного аппарата на корпусе 100, таким образом, что указанные перемещенные летательные аппараты 200 оказываются размещенными по меньшей мере на двух разных поверхностях корпуса 100.
В других вариантах реализации настоящего изобретения один или более винтов по меньшей мере в одном или каждом из винтовых движителей 250 по меньшей мере в одном из летательных аппаратов 200, состыкованных или соединенных с корпусом 100, может быть выполнен складным.
В иных вариантах реализации настоящего изобретения корпус 100 в воздушном транспортном средстве 500 может быть выполнен с возможностью перемещения через него по меньшей мере одного из летательных аппаратов 200, состыкованных или соединенных с корпусом 100, при стыковке или соединении указанного летательного аппарата 200 с корпусом 100 или при перемещении указанного летательного аппарата 200 по соответствующим направляющим 300.
В некоторых иных вариантах реализации настоящего изобретения корпус 100 в воздушном транспортном средстве 500 может быть снабжен сквозным отверстием (не показано), выполненным с возможностью входа в него любого или конкретного из летательных аппаратов 200, состыкованных или соединенных с корпусом 100, с одной из сторон корпуса 100 при перемещении указанного летательного аппарата по соответствующим направляющим 300 и выполненным с возможностью выхода из него указанного летательного аппарата 200 с обеспечением возможности его дальнейшего перемещения по другим направляющим 300, которыми корпус 100 может быть снабжен со стороны выхода указанного летательного аппарата 200 из указанного сквозного отверстия. Следует отметить, что в таких вариантах реализации настоящего изобретения направляющие 300, установленные на корпусе 100 со стороны, соответствующей входу летательного аппарата 200 в сквозное отверстие корпуса 100, должны доходить с указанной стороны корпуса 100 до указанного сквозного отверстия и должны быть выполнены с обеспечением возможности перехода летательного аппарата 200 с этих направляющих 300 в сквозное отверстие (например, направляющие 300 должны быть снабжены специальными средствами, обеспечивающими возможность схода летательного аппарата 200 с этих направляющих 300 и возможность его входа в сквозное отверстие корпуса 100). Следует также отметить, что в таких вариантах реализации настоящего изобретения другие направляющие 300, установленные на корпусе 100 со стороны, соответствующей выходу летательного аппарата 200 из сквозного отверстия корпуса 100, должны доходить с указанной стороны корпуса 100 до указанного сквозного отверстия и должны быть выполнены с обеспечением возможности постановки летательного аппарата 200, вышедшего из сквозного отверстия корпуса 100, на эти другие направляющие 300 (например, направляющие 300 должны быть снабжены специальными средствами, обеспечивающими возможность выхода летательного аппарата 200 из сквозного отверстия корпуса 100 и возможность постановки этого летательного аппарата 200 на эти направляющие 300). В одной из разновидностей таких вариантах реализации настоящего изобретения сквозное отверстие корпуса 100 может быть дополнительно снабжено направляющими, выполненными аналогично направляющим 300, при этом направляющие сквозного отверстия корпуса 100 могут быть дополнительно соединены с направляющими 300, установленными на корпусе 100 со стороны, соответствующей входу летательного аппарата 200 в сквозное отверстие корпуса 100, и с направляющими 300, установленными на корпусе 100 со стороны, соответствующей выходу летательного аппарата 200 из сквозного отверстия корпуса 100, с образованием составной направляющей, по которой может быть перемещен летательный аппарат под управлением управляющего устройства транспортного средства 500. В другой разновидности таких вариантах реализации настоящего изобретения вместо сквозного отверстия в корпусе 100 может быть выполнен прямолинейный или криволинейный сквозной туннель или проход (в том числе разветвленный с одним или более входов и одним или более выходов) для перемещения через него любого или конкретного из летательных аппаратов 200, состыкованных или соединенных с корпусом 100.
В некоторых других вариантах реализации настоящего изобретения корпус по меньшей мере одного из летательных аппаратов 200, которыми может быть снабжен корпус 100 в воздушном транспортном средстве 500, может быть выполнен с возможностью прохождения через него по меньшей мере части корпуса 100 при перемещении указанного по меньшей мере одного летательного аппарата 200 по корпусу 100 с использованием соответствующих направляющих 300.
В различных вариантах реализации настоящего изобретения корпус 100 в воздушном транспортном средстве 500 выполнен с обеспечением возможности перемещения по меньшей мере одного из летательных аппаратов 200, состыкованных или соединенных с корпусом 100, по соответствующим направляющим 300 по отношению к корпусу 100 или по меньшей мере одному другому летательному аппарату из указанных летательных аппаратов 200, выполняющего функцию референтного или опорного летательного аппарата для указанного перемещаемого летательного аппарата 200, для их размещения на заданном расстоянии друг от друга на одной из сторон корпуса 100, размещения на разных сторонах корпуса 100, размещения на противоположных сторонах корпуса 100 или размещения на смежных сторонах корпуса 100.
В различных иных вариантах реализации настоящего изобретения корпус 100 в воздушном транспортном средстве 500 может быть снабжен одной или более направляющими 300, по меньшей мере одна из которых может быть выполнена с возможностью стыковки или соединения с ней по меньшей мере одного из летательных аппаратов 200, которые должны быть пристыкованы или присоединены к корпусу 100, с обеспечением возможности перемещения по ней на заданное расстояние по отношению по меньшей мере к одному другому летательному аппарату из летательных аппаратов 200, которыми снабжен корпус 100.
В различных других вариантах реализации настоящего изобретения по меньшей мере одна из направляющих 300, которыми снабжен корпус 100 в воздушном транспортном средстве 500, может быть закреплена на корпусе 100 или может быть выполнена за одно целое с корпусом 100.
Согласно одному из вариантов реализации настоящего изобретения, по меньшей мере одна из направляющих 300, которыми снабжен корпус 100 в воздушном транспортном средстве 500, может быть по меньшей мере частично установлена в корпусе 100 или может проходить через или сквозь корпус 100.
Согласно другому варианту реализации настоящего изобретения корпус 100 в воздушном транспортном средстве 500 может быть снабжен соединенными между собой направляющими 300, которые могут быть выполнены с двух или более сторон корпуса 100, при этом по меньшей мере одна из указанных соединенных между собой направляющих 300 может быть выполнена с возможностью разъемного соединения с ней по меньшей мере одного из летательных аппаратов 200, которые должны быть пристыкованы или присоединены к корпусу 100, с обеспечением возможности перемещения указанного по меньшей мере одного летательного аппарата 200 по меньшей мере по части или некоторым из указанных направляющих 300.
Согласно еще одному варианту реализации настоящего изобретения корпус 100 в воздушном транспортном средстве 500 может быть снабжен двумя или более датчиками веса (не показаны), каждый из которых может быть выполнен с возможностью измерения веса полезной нагрузки во внутреннем пространстве корпуса 100 или в заданном месте корпуса 100, а управляющее устройство транспортного средства 500 может быть дополнительно соединено с указанными датчиками веса с возможностью приема от них результатов измерения веса полезной нагрузки (т.е. их показаний) для установления распределения полезной нагрузки в корпусе 100 и дополнительно обеспечивает возможность перемещения одного или более из летательных аппаратов 200, которыми снабжен корпус 100, по отношению друг к другу или по отношению к другому летательному аппарату из указанных летательных аппаратов 200 в зависимости от установленного распределения полезной нагрузки в корпусе 100 (т.е. в зависимости от показаний датчиков веса корпуса 100).
На фиг. 2 показан еще один иллюстративный вариант реализации воздушного транспортного средства 500 согласно настоящему изобретению, при этом фиг. 2 также наглядно иллюстрирует один из примеров процесса изменения положений летательных аппаратов 200 на корпусе 100 по отношению друг к другу.
Следует отметить, что воздушное транспортное средство 500, показанное на фиг. 2, по сути является альтернативным вариантом исполнения вышеописанного воздушного транспортного средства 500, показанного на фиг. 1, в связи с чем ниже опущено описание конструктивных и функциональных особенностей воздушного транспортного средства 500, показанного на фиг. 2, в части, совпадающей с соответствующими конструктивными и функциональными особенностями воздушного транспортного средства 500, показанного на фиг. 1. Следует также отметить, что релевантные частные варианты реализации настоящего изобретения, описанные выше в отношении транспортного средства 500, показанного на фиг. 1, применимы и в отношении транспортного средства 500, показанного на фиг. 2.
В частности, в отличие от воздушного транспортного средства 500, показанного на фиг. 1, в воздушном транспортном средстве 500, показанном на фиг. 2, каждый из летательных аппаратов 200, состыкованных или соединенных с корпусом 100 с обеспечением возможности перемещения по корпусу 100 по отношению друг к другу с использованием направляющих 300, представляет собой несущую рамку или несущую раму с четырьмя воздушными движителями 250, каждый из которых установлен с одной из сторон указанной несущей рамы. Как показано на фиг. 2, несущая рама в каждом из летательных аппаратов 200, состыкованных или соединенных с корпусом 100 в воздушном транспортном средстве 500, показанном на фиг. 2, выполнена с возможностью перемещения по двум парам направляющих, которые образованы каждая из двух прямолинейных направляющих 200, проходящих параллельно друг другу по высоте корпуса 100, и которые установлены или размещены по существу симметрично друг другу на противоположных сторонах корпуса 100. Следует отметить, что несущая рама в каждом из летательных аппаратов 200, состыкованных или соединенных с корпусом 100 в воздушном транспортном средстве 500, показанном на фиг. 2, предпочтительно имеет квадратную или прямоугольную форму, но и может иметь и любую другую форму, подходящую для стыковки или соединения указанного летательного аппарата 200 с корпусом 100. Следует также отметить, что несущая рама каждого летательного аппарата 200, который должен быть состыкован или соединен с корпусом 100 в воздушном транспортном средстве 500, показанном на фиг. 2, по сути надевается на корпус 100 снизу или сверху с обеспечением вхождения в неразъемное или разъемное взаимодействие с двумя парами направляющих, образованными каждая из двух прямолинейных направляющих 200.
В одном из вариантов реализации настоящего изобретения несущая рама по меньшей мере в одном или каждом из летательных аппаратов 200, состыкованных или соединенных с корпусом 100 в воздушном транспортном средстве 500, показанном на фиг. 2, может быть снабжена одним или более воздушными движителями 250 на каждой или по меньшей мере на одной из сторон указанном несущей рамы. В одной из разновидностей данного варианта реализации настоящего изобретения несущая рама по меньшей мере в одном или каждом из летательных аппаратов 200, состыкованных или соединенных с корпусом 100 в воздушном транспортном средстве 500, показанном на фиг. 2, может быть снабжена двумя или более воздушными движителями 250 с каждой из сторон указанной несущей рамы, при этом количество воздушных движителей 250 на указанных сторонах несущей рамы может быть одинаковым или разным. В другой разновидности данного варианта реализации настоящего изобретения несущая рама по меньшей мере в одном или каждом из летательных аппаратов 200, состыкованных или соединенных с корпусом 100 в воздушном транспортном средстве 500, показанном на фиг. 2, может быть снабжена одним или более воздушными движителями 250 на каждой из двух противоположных сторон указанной несущей рамы.
В другом варианте реализации настоящего изобретения одна или более сторон несущей рамы по меньшей мере в одном или каждом из летательных аппаратов 200, состыкованных или соединенных с корпусом 100 в воздушном транспортном средстве 500, показанном на фиг. 2, может быть снабжена одним или более воздушными движителями 250. В одной из разновидностей данного варианта реализации настоящего изобретения несущая рама по меньшей мере в одном или каждом из летательных аппаратов 200, состыкованных или соединенных с корпусом 100 в воздушном транспортном средстве 500, показанном на фиг. 2, может быть снабжена одним и более воздушными движителями 250 только на одной из сторон указанной несущей рамы, только на двух сторонах указанной несущей рамы, только на трех сторонах указанной несущей рамы или т.п.
Еще в одном варианте реализации настоящего изобретения корпус 100 в воздушном транспортном средстве 500, показанном на фиг. 2, может быть снабжен с каждой из своих сторон одной или более парами направляющих (например, одной, двумя, тремя, четырьмя, пятью, шестью, семью, девятью, десятью и большим количеством пар направляющих в зависимости от геометрических размеров корпуса 100), образованных каждая из двух параллельных друг другу прямолинейных направляющих 300, а каждый из летательных аппаратов 200, который должен быть состыкован или соединен с корпусом 100, может быть выполнен с возможностью входа в неразъемное или разъемное взаимодействие со всеми парами направляющих корпуса 100 или только их частью при стыковке или соединении с корпусом 100 под управлением управляющего устройства транспортного средства 500 с обеспечением возможности перемещения по направляющим 300, входящим в состав указанных пар направляющих корпуса 100, с которыми указанный летательный аппарат 200 вошел во взаимодействие.
В одном из вариантов реализации настоящего изобретения каждый из летательных аппаратов 200, состыкованных или соединенных с корпусом 100 в транспортном средстве 500, показанном на фиг. 2, с обеспечением возможности перемещения по корпусу 100 по отношению друг к другу с использованием направляющих 300, может представлять собой несущий остов, несущий каркас или любую несущую конструкцию, снабженную одним или более воздушными движителями 250 по меньшей мере с одной или каждой из своих сторон.
Следует отметить, что корпус 100 в воздушном транспортном средстве 500, показанном на фиг. 2, может быть выполнен с возможностью стыковки или соединения с ним двух или более летательных аппаратов 200 (в частности, путем надевания несущей рамы каждого из таких летательных аппаратов 200 на корпус 100 с его нижней или верхней стороны), или может быть предварительно соединен с двумя или более летательными аппаратами 200 с обеспечением возможности перемещения по меньшей мере одного или каждого из указанных присоединенных летательных аппаратов 200 по одной или более пар направляющих, образованных каждая из двух направляющих 300, на заданное расстояние под управлением управляющего устройства транспортного средства 500.
Как показано на фиг. 2 сверху, летательные аппараты 200, состыкованные или соединенные с корпусом 100, размещены на парах направляющих корпуса 100 друг за другом или вплотную друг к другу (в том числе с образованием стопы). В одном из вариантов реализации настоящего изобретения два смежных или размещенных вплотную друг к другу летательных аппаратов из летательных аппаратов 200, состыкованных или соединенных с корпусом 100 в транспортном средстве 500, показанном на фиг. 2, могут быть скреплены или соединены между собой с образованием функциональной пары летательных аппаратов, выполненной с возможностью перемещения по парам направляющих корпуса 100 под управлением модуля управления одного из летательных аппаратов 200, образующих указанную функциональную пару летательных аппаратов, в том числе в ответ на управляющие команды управляющего устройства транспортного средства 500.
Как показано на фиг. 2 снизу, перед взлетом транспортного средства 500, перед посадкой транспортного средства 500 и/или в процессе перемещения по воздуху или полета транспортного средства 500 управляющее устройство транспортного средства 500 устанавливает связь с модулями управления летательных аппаратов 200, состыкованных или соединенных с корпусом 100, с обеспечением возможности по существу одновременного или последовательного (друг за другом через заданный период времени) перемещения указанных летательных аппаратов 200 по парам направляющих корпуса 100, по отношению друг к другу с обеспечением размещения указанных перемещенных летательных аппаратов 200 на заданном расстоянии (в частности, на одинаковом или равном расстоянии) друг от друга по высоте корпуса 100. В частности, при одновременном или последовательном перемещении летательных аппаратов 200 по отношению друг к другу под управлением управляющего устройства транспортного средства 500, показанного на фиг. 2, каждый из указанных перемещаемых летательных аппаратов 200 по сути совершает перемещение по корпусу 100 с использованием соответствующих направляющих 300, образующих пары направляющих корпуса 100, по отношению по меньшей мере к одному другому (референтному или опорному) летательному аппарату из летательных аппаратов 200, состыкованных или соединенных с корпусом 100. В одном из вариантов реализации настоящего изобретения управляющее устройство транспортного средства 500 в транспортном средстве 500, показанном на фиг. 2, может выдавать управляющие инструкции на модуль управления каждого из одного или более летательных аппаратов 200, состыкованных или соединенных с корпусом 100, с обеспечением возможности перемещения указанного летательного аппарата 200 по парам направляющих корпуса 100 по отношению к одному или более других летательных аппаратов из летательных аппаратов 200, состыкованных или соединенных с корпусом 100, при этом указанные один или более других летательных аппаратов выполняют каждый функцию референтного или опорного летательного аппарата на корпусе 100 для указанного перемещаемого летательного аппарата 200. В одной из разновидностей данного варианта реализации настоящего изобретения в транспортном средстве 500, показанном на фиг. 2, под управлением управляющего устройства транспортного средства 500 по корпусу 100 с использованием пар направляющих корпуса 100 может быть перемещен по меньшей мере один или каждый из летательных аппаратов 200, состыкованных или соединенных с корпусом 100, при этом в качестве референтного или опорного летательного аппарата на корпусе 100 для указанного перемещаемого летательного аппарата 200 может быть использован любой один другой из остальных летательных аппаратов, входящих в состав указанных летательных аппаратов 200, состыкованных или соединенных с корпусом 100, или в качестве референтных или опорных летательных аппаратов на корпусе 100 могут быть использованы любые два или более других из указанных остальных летательных аппаратов 200. Следует отметить, что в данной разновидности варианта реализации настоящего изобретения для разных летательных аппаратов 200, перемещаемых по корпусу 100 в транспортном средстве 500, показанном на фиг. 2, с использованием соответствующих направляющих 300, в качестве референтного или опорного летательного аппарата на корпусе 100 может быть использован один и тот же или отдельный (отличный от других) летательный аппарат из летательных аппаратов 200, состыкованных или соединенных с корпусом 100. В другом варианте реализации настоящего изобретения управляющее устройство транспортного средства 500 в транспортном средстве 500, показанном на фиг. 2, может выдавать управляющие инструкции на модуль управления каждого из двух или более летательных аппаратов 200, состыкованных или соединенных с корпусом 100, с обеспечением возможности одновременного или совместного перемещения указанных летательных аппаратов 200 по парам направляющих корпуса 100 по отношению к одному и тому же летательному аппарату 200 на корпусе 100, являющемуся референтным или опорным для указанного перемещаемого летательного аппарата 200.
Следует отметить, что перемещение по меньшей мере одного или каждого из летательных аппаратов 200, состыкованных или соединенных с корпусом 100 в транспортном средстве 500, показанном на фиг. 2, под управлением управляющего устройства транспортного средства 500 по корпусу 100 по отношению по меньшей мере к одному другому летательному аппарату из указанных летательных аппаратов 200 обеспечивает возможность изменения по меньшей мере одной из летных характеристик транспортного средства 500, показанного на фиг. 2, что в свою очередь позволяет этому транспортному средству 500 занять более сбалансированное или равновесное пространственное положение в воздухе.
Кроме того, как показано на фиг. 2, перед взлетом транспортного средства 500, перед посадкой транспортного средства 500 и/или в процессе перемещения по воздуху или полета транспортного средства 500 летательные аппараты 200, которыми снабжен корпус 100, могут быть размещены на корпусе 100 таким образом, что воздушные движители 250 находятся со разных сторон корпуса 100 (см. нижнюю часть фиг. 2), а управляющее устройство транспортного средства 500 может установить связь с модулями управления указанных летательных аппаратов 200 с обеспечением возможности по существу одновременного или последовательного (друг за другом через заданный период времени) перемещения указанных летательных аппаратов 200 по парам направляющих корпуса 100, соответствующим указанным сторонам корпуса 100, по отношению друг к другу или по отношению к корпусу 100 с обеспечением возможности их размещения друг под другом или вплотную друг с другом (см. верхнюю часть фиг. 2). В одном из вариантов реализации настоящего изобретения, управляющее устройство транспортного средства 500 в транспортном средстве 500, показанном на фиг. 2, может быть дополнительно выполнено с обеспечением возможности перемещения по меньшей мере одного или каждого из воздушных движителей 250 по меньшей мере в одном или каждом из летательных аппаратах 200, размещенных друг под другом или вплотную друг к другу на направляющих 300, по длине стороны несущей рамы летательного аппарата 200, которой соответствует указанный воздушный движитель 250.
На фиг. 3 показан еще один иллюстративный вариант реализации воздушного транспортного средства 500 согласно настоящему изобретению, при этом фиг. 3 также наглядно иллюстрирует один из примеров процесса изменения положений летательных аппаратов 200 на корпусе 100 по отношению друг к другу.
Следует отметить, что воздушное транспортное средство 500, показанное на фиг. 3, по сути является альтернативным вариантом исполнения вышеописанного воздушного транспортного средства 500, показанного на фиг. 1, в связи с чем ниже опущено описание конструктивных и функциональных особенностей воздушного транспортного средства 500, показанного на фиг. 3, в части, совпадающей с соответствующими конструктивными и функциональными особенностями воздушного транспортного средства 500, показанного на фиг. 1. Следует также отметить, что релевантные частные варианты реализации настоящего изобретения, описанные выше в отношении транспортного средства 500, показанного на фиг. 1, применимы и в отношении транспортного средства 500, показанного на фиг. 3.
В частности, в отличие от воздушного транспортного средства 500, показанного на фиг. 1, в воздушном транспортном средстве 500, показанном на фиг. 3, по меньшей мере часть из направляющих 300, которые выполнены или установлены с разных сторон корпуса 100, соединены между собой с образованием составных направляющих, части каждой из которых могут быть расположены в разных плоскостях корпуса 100 или в одной и той же плоскости корпуса 100, при этом каждая из частей составной направляющей по сути соответствует одной из направляющих 300, образующих указанную составную направляющую корпуса 100. Кроме того, в отличие от воздушного транспортного средства 500, показанного на фиг. 1, в воздушном транспортном средстве 500, показанном на фиг. 3, по меньшей мере один или каждый из летательных аппаратов 200, состыкованных или соединенных с корпусом 100, установлен на одиночной направляющей 300 (т.е. направляющей 300, которая не соединена ни с одной из остальных направляющих 300, которыми снабжен корпус 100) или на одной из частей, входящих в состав одной из составных направляющих корпуса 100, с обеспечением возможности перемещения по указанной направляющей по отношению к корпусу 100 или по отношению по меньшей мере к одному другому летательному аппарату из указанных летательных аппаратов 200, выполняющему функцию референтного или опорного летательного аппарата для указанного перемещаемого летательного аппарата 200.
Кроме того, как показано на фиг. 3, по меньшей мере один или каждый из летательных аппаратов 200, установленных по меньшей мере на одной или каждой из составных направляющих корпуса 100, может быть перемещен под управлением управляющего устройства транспортного средства 500 по длине указанной составной направляющей корпуса 100 с обеспечением остановки или размещения с любой из сторон корпуса 100, снабженных каждая одной из частей указанной составной направляющей корпуса 100.
Еще в одном варианте реализации настоящего изобретения корпус 100 в воздушном транспортном средстве 500, показанном на фиг. 3, может быть снабжен с каждой из своих сторон одной или более прямолинейными направляющими 300 (например, одной, двумя, тремя, четырьмя, пятью, шестью, семью, девятью, десятью и большим количеством прямолинейных направляющих 300 в зависимости от геометрических размеров корпуса 100), а каждый из летательных аппаратов 200, который должен быть состыкован или соединен с корпусом 100, может быть выполнен с возможностью входа в неразъемное или разъемное взаимодействие с одной из указанных направляющих 300 при стыковке или соединении с корпусом 100 под управлением управляющего устройства транспортного средства 500 с обеспечением возможности перемещения по указанной направляющей 300, с которой указанный летательный аппарат 200 вошел во взаимодействие.
Как показано на фиг. 3 слева, летательные аппараты 200, состыкованные или соединенные с корпусом 100, размещены по три штуки на каждой из трех направляющих 300, выполненных или установленных на верхней части корпуса 100 (например, на крыше корпуса 100), таким образом, что летательные аппараты 200 на каждой из указанных направляющих 300 расположены на заданном расстоянии друг от друга (например, на одинаковом или равном расстоянии друг от друга).
В одном из вариантов реализации настоящего изобретения два смежных или размещенных вплотную друг к другу летательных аппаратов из летательных аппаратов 200, установленных по меньшей мере на одной или каждой из направляющих 300, которыми снабжен корпус 100 в транспортном средстве 500, показанном на фиг. 3, могут быть скреплены или соединены между собой с образованием функциональной пары летательных аппаратов, выполненной с возможностью перемещения по указанной направляющей 300 под управлением модуля управления одного из летательных аппаратов 200, образующих указанную функциональную пару летательных аппаратов, в том числе в ответ на управляющие команды управляющего устройства транспортного средства 500 в воздушном транспортном средстве 500, показанном на фиг. 3.
Таким образом, как показано на фиг. 3 слева, летательные аппараты 200, состыкованные или соединенные с корпусом 100 в транспортном средстве 500, показанном на фиг. 3, могут быть по меньшей мере частично или полностью размещены на соответствующих направляющих 300 с одной из сторон корпуса 100.
Как показано на фиг. 3 справа, перед взлетом транспортного средства 500, перед посадкой транспортного средства 500 и/или в процессе перемещения по воздуху или полета транспортного средства 500 управляющее устройство транспортного средства 500 устанавливает связь с модулями управления летательных аппаратов 200, состыкованных или соединенных с корпусом 100, с обеспечением возможности по существу одновременного или последовательного (друг за другом через заданный период времени) перемещения указанных летательных аппаратов 200 по направляющим 300 по отношению друг к другу с обеспечением размещения указанных перемещенных летательных аппаратов 200 с разных сторон корпуса 100, на каждой из которых могут быть размещены один или более перемещенных летательных аппаратов 200. В частности, при одновременном или последовательном перемещении летательных аппаратов 200 по отношению друг к другу под управлением управляющего устройства транспортного средства 500 в транспортном средстве 500, показанном на фиг. 3, каждый из указанных перемещаемых летательных аппаратов 200 по сути совершает перемещение по корпусу 100 с использованием одной из направляющих 300, которыми снабжен корпус 100, по отношению по меньшей мере к одному другому (референтному или опорному) летательному аппарату из летательных аппаратов 200, состыкованных или соединенных с корпусом 100. В одном из вариантов реализации настоящего изобретения управляющее устройство транспортного средства 500 в транспортном средстве 500, показанном на фиг. 3, может выдавать управляющие инструкции на модуль управления каждого из одного или более летательных аппаратов 200, состыкованных или соединенных с корпусом 100, с обеспечением возможности перемещения указанного летательного аппарата 200 по одной или более направляющих 300 по отношению к одному или более других летательных аппаратов из летательных аппаратов 200, состыкованных или соединенных с корпусом 100, при этом указанные один или более других летательных аппаратов выполняют каждый функцию референтного или опорного летательного аппарата на корпусе 100 для указанного перемещаемого летательного аппарата 200. В одной из разновидностей данного варианта реализации настоящего изобретения в транспортном средстве 500, показанном на фиг. 3, под управлением управляющего устройства транспортного средства 500 по корпусу 100 с использованием направляющих 300 может быть перемещен по меньшей мере один или каждый из летательных аппаратов 200, состыкованных или соединенных с корпусом 100, при этом в качестве референтного или опорного летательного аппарата на корпусе 100 для указанного перемещаемого летательного аппарата 200 может быть использован любой один другой из остальных летательных аппаратов, входящих в состав указанных летательных аппаратов 200, состыкованных или соединенных с корпусом 100, или в качестве референтных или опорных летательных аппаратов на корпусе 100 могут быть использованы любые два или более других из указанных остальных летательных аппаратов 200. Следует отметить, что в данной разновидности варианта реализации настоящего изобретения для разных летательных аппаратов 200, перемещаемых по корпусу 100 в транспортном средстве 500, показанном на фиг. 3, с использованием соответствующих направляющих 300, в качестве референтного или опорного летательного аппарата на корпусе 100 может быть использован один и тот же или отдельный (отличный от других) летательный аппарат из летательных аппаратов 200, состыкованных или соединенных с корпусом 100. В другом варианте реализации настоящего изобретения управляющее устройство транспортного средства 500 в транспортном средстве 500, показанном на фиг. 3, может выдавать управляющие инструкции на модуль управления каждого из двух или более летательных аппаратов 200, состыкованных или соединенных с корпусом 100, с обеспечением возможности одновременного или совместного перемещения указанных летательных аппаратов 200 по соответствующим направляющим 300 по отношению к одному и тому же летательному аппарату 200 на корпусе 100, являющемуся референтным или опорным для указанного перемещаемого летательного аппарата 200.
Следует отметить, что перемещение по меньшей мере одного или каждого из летательных аппаратов 200, состыкованных или соединенных с корпусом 100 в транспортном средстве 500, показанном на фиг. 3, под управлением управляющего устройства транспортного средства 500 по корпусу 100 по отношению по меньшей мере к одному другому летательному аппарату из указанных летательных аппаратов 200 обеспечивает возможность изменения по меньшей мере одной из летных характеристик транспортного средства 500, показанного на фиг. 3, что в свою очередь позволяет этому транспортному средству 500 занять более сбалансированное или равновесное пространственное положение в воздухе.
Кроме того, как показано на фиг. 3, перед взлетом транспортного средства 500, перед посадкой транспортного средства 500 и/или в процессе перемещения по воздуху или полета транспортного средства 500 летательные аппараты 200, которыми снабжен корпус 100, могут быть размещены на корпусе 100 с разных его сторон (см. фиг. 3 справа), а управляющее устройство транспортного средства 500 может установить связь с модулями управления указанных летательных аппаратов 200 с обеспечением возможности по существу одновременного или последовательного (друг за другом через заданный период времени) перемещения указанных летательных аппаратов 200 по соответствующим направляющим 300 по отношению друг к другу или по отношению к корпусу 100 с обеспечением возможности размещения по меньшей мере части из указанных перемещаемых летательных аппаратов с одной из сторон корпуса 100, в частности на крыше корпуса 100 (см. фиг. 3 слева).
На фиг. 4 показан еще один иллюстративный вариант реализации воздушного транспортного средства 500 согласно настоящему изобретению, при этом фиг. 4 также наглядно иллюстрирует один из примеров процесса изменения положений летательных аппаратов 200 на корпусе 100 по отношению друг к другу.
Следует отметить, что воздушное транспортное средство 500, показанное на фиг. 4, по сути является альтернативным вариантом исполнения вышеописанного воздушного транспортного средства 500, показанного на фиг. 1, в связи с чем ниже опущено описание конструктивных и функциональных особенностей воздушного транспортного средства 500, показанного на фиг. 4, в части, совпадающей с соответствующими конструктивными и функциональными особенностями воздушного транспортного средства 500, показанного на фиг. 1. Следует также отметить, что релевантные частные варианты реализации настоящего изобретения, описанные выше в отношении транспортного средства 500, показанного на фиг. 1, применимы и в отношении транспортного средства 500, показанного на фиг. 4.
В частности, в отличие от воздушного транспортного средства 500, показанного на фиг. 1, в воздушном транспортном средстве 500, показанном на фиг. 4, по меньшей мере часть из направляющих 300, которые выполнены или установлены с разных сторон корпуса 100, соединены между собой с образованием составных направляющих, части каждой из которых могут быть расположены в разных плоскостях корпуса 100 или в одной и той же плоскости корпуса 100, при этом каждая из частей составной направляющей по сути соответствует одной из направляющих 300, образующих указанную составную направляющую корпуса 100.
Кроме того, в отличие от воздушного транспортного средства 500, показанного на фиг. 1, в воздушном транспортном средстве 500, показанном на фиг. 4, по меньшей мере один или каждый из летательных аппаратов 200, состыкованных или соединенных с корпусом 100, установлен на одиночной направляющей 300 (т.е. направляющей 300, которая не соединена ни с одной из остальных направляющих 300, которыми снабжен корпус 100) или на одной из частей, входящих в состав одной из составных направляющих корпуса 100, с обеспечением возможности перемещения по указанной направляющей по отношению к корпусу 100 или по отношению по меньшей мере к одному другому летательному аппарату из указанных летательных аппаратов 200, выполняющему функцию референтного или опорного летательного аппарата для указанного перемещаемого летательного аппарата 200, с использованием подвижного модулях 400 стыковки в виде каретки, предварительно установленного или закрепленного на указанной направляющей с возможностью перемещения по ее длине по заданной траектории перемещения под управлением управляющего устройства транспортного средства 500 и предварительно снабженного крепежными или соединительными средствами, выполненными с возможностью неразъемного или разъемного взаимодействия с ответными крепежными средствами летательного аппарата 200, который должен быть состыкован или соединен с указанным модулем 400 стыковки.
Как показано на фиг. 4, каждая из направляющих 300, которыми снабжен корпус 100 со своих разных сторон, снабжена одним или более подвижных модулей 400 стыковки, выполненных каждый в виде каретки и установленных на указанной направляющей 300 с возможностью перемещения по ее длине под управлением управляющего устройства транспортного средства 500. Следует отметить, что по меньшей мере один или каждый из подвижных модулей 400 стыковки, установленных по меньшей мере на одной или каждой из составных направляющих корпуса 100, образованных из двух или более соединенных между собой отдельных направляющих 300, которые могут быть выполнены с одной и той же стороны корпуса 100 или с разных сторон корпуса 100, может совершать перемещение под управлением управляющего устройства транспортного средства 500 по одной или более частей указанной составной направляющей корпуса 100.
Кроме того, как показано на фиг. 4, по меньшей мере один или каждый из летательных аппаратов 200, установленных по меньшей мере на одной или каждой из составных направляющих корпуса 100, может быть перемещен под управлением управляющего устройства транспортного средства 500 по длине указанной составной направляющей корпуса 100 с обеспечением остановки или размещения с любой из сторон корпуса 100, снабженных каждая одной из частей указанной составной направляющей корпуса 100.
В одном из вариантов реализации настоящего изобретения корпус 100 в воздушном транспортном средстве 500, показанном на фиг. 4, может быть снабжен с каждой из своих сторон одной или более прямолинейными направляющими 300 (например, одной, двумя, тремя, четырьмя, пятью, шестью, семью, девятью, десятью и большим количеством прямолинейных направляющих 300 в зависимости от геометрических размеров корпуса 100), а каждый из летательных аппаратов 200, который должен быть состыкован или соединен с корпусом 100, может быть выполнен с возможностью входа в неразъемное или разъемное взаимодействие с одним из модулей 400 стыковки при стыковке или соединении с корпусом 100 под управлением управляющего устройства транспортного средства 500 с обеспечением возможности перемещения на указанном модуле 400 стыковки по направляющей 300, на которой установлен указанный модуль 400 стыковки, во взаимодействие с которым вошел указанный летательный аппарат 200.
Как показано на фиг. 4, летательные аппараты 200, прилетевшие в заданную область пространства, в которой находится воздушное транспортное средство 500, в ответ на соответствующие навигационные команды, принятые модулями управления указанных прилетевших летательных аппаратов 200 от управляющего устройства транспортного средства 500, могут пристыковаться или присоединиться к корпусу 100 в ответ на соответствующие управляющие команды управляющего устройства транспортного средства 500 путем ввода крепежных средств каждого из указанных летательных аппаратов 200 в неразъемное или разъемное взаимодействие с ответными крепежными средствами одного из модулей 400 стыковки, установленных с возможностью перемещения по соответствующим направляющим 300, которыми снабжен корпус 100 в воздушном транспортном средстве 500, показанном на фиг. 4.
Кроме того, как показано на фиг. 4, перед взлетом транспортного средства 500, перед посадкой транспортного средства 500 и/или в процессе перемещения по воздуху или полета транспортного средства 500 летательные аппараты 200, которыми снабжен корпус 100, могут быть размещены на корпусе 100 с разных его сторон (см. фиг. 4 слева), а управляющее устройство транспортного средства 500 может установить связь с модулями управления указанных летательных аппаратов 200 с обеспечением возможности по существу одновременного или последовательного (друг за другом через заданный период времени) перемещения указанных летательных аппаратов 200 на соответствующих подвижных модулях 400 стыковки, установленных на соответствующих направляющих 300, по указанным направляющим 300 по отношению друг к другу или по отношению к корпусу 100 с обеспечением возможности размещения по меньшей мере части из указанных перемещаемых летательных аппаратов с одной из сторон корпуса 100, в частности на крыше корпуса 100 (см. фиг. 4 справа).
Как показано на фиг. 4 справа, летательные аппараты 200, состыкованные или соединенные с корпусом 100, размещены на соответствующих модулях 400 стыковки по три штуки на каждой из трех направляющих 300, выполненных или установленных на верхней части корпуса 100 (например, на крыше корпуса 100), таким образом, что летательные аппараты 200 на каждой из указанных направляющих 300 расположены на заданном расстоянии друг от друга (например, на одинаковом или равном расстоянии друг от друга).
В одном из вариантов реализации настоящего изобретения два смежных или размещенных вплотную друг к другу летательных аппаратов из летательных аппаратов 200, установленных по меньшей мере на одной или каждой из направляющих 300, которыми снабжен корпус 100 в транспортном средстве 500, показанном на фиг. 4, могут быть скреплены или соединены между собой с образованием функциональной пары летательных аппаратов, выполненной с возможностью перемещения по указанной направляющей 300 под управлением модуля управления одного из летательных аппаратов 200, образующих указанную функциональную пару летательных аппаратов, в том числе в ответ на управляющие команды управляющего устройства транспортного средства 500 в воздушном транспортном средстве 500, показанном на фиг. 4.
В частности, при одновременном или последовательном перемещении летательных аппаратов 200 по отношению друг к другу под управлением управляющего устройства транспортного средства 500 в транспортном средстве 500, показанном на фиг. 4, каждый из указанных перемещаемых летательных аппаратов 200 по сути совершает перемещение по корпусу 100 с использованием одной из направляющих 300, которыми снабжен корпус 100, по отношению по меньшей мере к одному другому (референтному или опорному) летательному аппарату из летательных аппаратов 200, состыкованных или соединенных с корпусом 100. В одном из вариантов реализации настоящего изобретения управляющее устройство транспортного средства 500 в транспортном средстве 500, показанном на фиг. 4, может выдавать управляющие инструкции на модуль управления каждого из одного или более летательных аппаратов 200, состыкованных или соединенных с корпусом 100, с обеспечением возможности перемещения указанного летательного аппарата 200 по одной или более направляющих 300 по отношению к одному или более других летательных аппаратов из летательных аппаратов 200, состыкованных или соединенных с корпусом 100, при этом указанные один или более других летательных аппаратов выполняют каждый функцию референтного или опорного летательного аппарата на корпусе 100 для указанного перемещаемого летательного аппарата 200. В одной из разновидностей данного варианта реализации настоящего изобретения в транспортном средстве 500, показанном на фиг. 4, под управлением управляющего устройства транспортного средства 500 по корпусу 100 с использованием направляющих 300 может быть перемещен по меньшей мере один или каждый из летательных аппаратов 200, состыкованных или соединенных с корпусом 100, при этом в качестве референтного или опорного летательного аппарата на корпусе 100 для указанного перемещаемого летательного аппарата 200 может быть использован любой один другой из остальных летательных аппаратов, входящих в состав указанных летательных аппаратов 200, состыкованных или соединенных с корпусом 100, или в качестве референтных или опорных летательных аппаратов на корпусе 100 могут быть использованы любые два или более других из указанных остальных летательных аппаратов 200. Следует отметить, что в данной разновидности варианта реализации настоящего изобретения для разных летательных аппаратов 200, перемещаемых по корпусу 100 в транспортном средстве 500, показанном на фиг. 4, с использованием соответствующих направляющих 300, в качестве референтного или опорного летательного аппарата на корпусе 100 может быть использован один и тот же или отдельный (отличный от других) летательный аппарат из летательных аппаратов 200, состыкованных или соединенных с корпусом 100. В другом варианте реализации настоящего изобретения управляющее устройство транспортного средства 500 в транспортном средстве 500, показанном на фиг. 4, может выдавать управляющие инструкции на модуль управления каждого из двух или более летательных аппаратов 200, состыкованных или соединенных с корпусом 100, с обеспечением возможности одновременного или совместного перемещения указанных летательных аппаратов 200 по соответствующим направляющим 300 по отношению к одному и тому же летательному аппарату 200 на корпусе 100, являющемуся референтным или опорным для указанного перемещаемого летательного аппарата 200.
Таким образом, как показано на фиг. 4 справа, летательные аппараты 200, в результате их перемещения по корпусу 100 в транспортном средстве 500, показанном на фиг. 3, под управлением управляющего устройства транспортного средства 500 могут быть по меньшей мере частично или полностью размещены на соответствующих направляющих 300 с одной из сторон корпуса 100 с использованием соответствующих модулей 400 стыковки, например на верхней части (крыше) корпуса 100.
Следует отметить, что перемещение по меньшей мере одного или каждого из летательных аппаратов 200, состыкованных или соединенных с корпусом 100 в транспортном средстве 500, показанном на фиг. 4, под управлением управляющего устройства транспортного средства 500 по корпусу 100 по отношению по меньшей мере к одному другому летательному аппарату из указанных летательных аппаратов 200 обеспечивает возможность изменения по меньшей мере одной из летных характеристик транспортного средства 500, показанного на фиг. 4, что в свою очередь позволяет этому транспортному средству 500 занять более сбалансированное или равновесное пространственное положение в воздухе.
Кроме того, как показано на фиг. 4, перед взлетом транспортного средства 500, перед посадкой транспортного средства 500 и/или в процессе перемещения по воздуху или полета транспортного средства 500 летательные аппараты 200, которыми снабжен корпус 100, могут быть размещены на корпусе 100 с одной из его сторон (см. фиг. 4 справа), а управляющее устройство транспортного средства 500 может установить связь с модулями управления указанных летательных аппаратов 200 с обеспечением возможности по существу одновременного или последовательного (друг за другом через заданный период времени) перемещения указанных летательных аппаратов 200 по направляющим 300 по отношению друг к другу с обеспечением размещения указанных перемещенных летательных аппаратов 200 с разных сторон корпуса 100 (см. фиг. 4 слева), на каждой из которых могут быть размещены один или более перемещенных летательных аппаратов 200. Следует также отметить, что управляющее устройство транспортного средства 500 в транспортном средстве 500, показанном на фиг. 4, может выдавать управляющие инструкции по меньшей мере на один из летательных аппаратов 200, состыкованных или соединенных с корпусом 100, с обеспечением возможности выхода указанного летательного аппарата 200 из взаимодействия с крепежными средствами соответствующего одного из модулей 400 стыковки, установленных на соответствующих направляющих 300, которыми снабжен корпус 100, для отстыковки или отсоединения указанного летательного аппарата от указанного модулях 400 стыковки и, следовательно, от направляющей 300 или от корпуса 100, при этом указанный отстыкованный летательный аппарат 200 может быть направлен управляющим устройством транспортного средства 500 в заданное пространственное местоположение в области пространства, в которой находится транспортное средство 500, показанное на фиг. 4.
На фиг. 5 показан еще один иллюстративный вариант реализации воздушного транспортного средства 500 согласно настоящему изобретению, при этом фиг. 5 также наглядно иллюстрирует один из примеров процесса изменения положений летательных аппаратов 200 на корпусе 100 по отношению друг к другу.
Следует отметить, что воздушное транспортное средство 500, показанное на фиг. 5, по сути является альтернативным вариантом исполнения вышеописанного воздушного транспортного средства 500, показанного на фиг. 1, в связи с чем ниже опущено описание конструктивных и функциональных особенностей воздушного транспортного средства 500, показанного на фиг. 5, в части, совпадающей с соответствующими конструктивными и функциональными особенностями воздушного транспортного средства 500, показанного на фиг. 1. Следует также отметить, что релевантные частные варианты реализации настоящего изобретения, описанные выше в отношении транспортного средства 500, показанного на фиг. 1, применимы и в отношении транспортного средства 500, показанного на фиг. 5.
В частности, в отличие от воздушного транспортного средства 500, показанного на фиг. 1, в воздушном транспортном средстве 500, показанном на фиг. 5, по меньшей мере часть из направляющих 300, которые выполнены или установлены с разных сторон корпуса 100, соединены между собой с образованием составных направляющих, части каждой из которых могут быть расположены в разных плоскостях корпуса 100 или в одной и той же плоскости корпуса 100, при этом каждая из частей составной направляющей по сути соответствует одной из направляющих 300, образующих указанную составную направляющую корпуса 100.
Кроме того, в отличие от воздушного транспортного средства 500, показанного на фиг. 1, в воздушном транспортном средстве 500, показанном на фиг. 5, по меньшей мере один или каждый из летательных аппаратов 200, состыкованных или соединенных с корпусом 100, установлен на одиночной направляющей 300 (т.е. направляющей 300, которая не соединена ни с одной из остальных направляющих 300, которыми снабжен корпус 100) или на одной из частей, входящих в состав одной из составных направляющих корпуса 100, с обеспечением возможности перемещения по указанной направляющей по отношению к корпусу 100 или по отношению по меньшей мере к одному другому летательному аппарату из указанных летательных аппаратов 200, выполняющему функцию референтного или опорного летательного аппарата для указанного перемещаемого летательного аппарата 200, с использованием подвижного модулях 400 стыковки в виде каретки, предварительно установленного или закрепленного на указанной направляющей с возможностью перемещения по ее длине под управлением управляющего устройства транспортного средства 500 и предварительно снабженного крепежными или соединительными средствами, выполненными с возможностью неразъемного или разъемного взаимодействия с ответными крепежными средствами летательного аппарата 200, который должен быть состыкован или соединен с указанным модулем 400 стыковки.
Как показано на фиг. 5, каждая из направляющих 300, которыми снабжен корпус 100 со своих разных сторон, снабжена одним или более подвижных модулей 400 стыковки, выполненных каждый в виде каретки и установленных на указанной направляющей 300 с возможностью перемещения по ее длине под управлением управляющего устройства транспортного средства 500. Следует отметить, что по меньшей мере один или каждый из подвижных модулей 400 стыковки, установленных по меньшей мере на одной или каждой из составных направляющих корпуса 100, образованных из двух или более соединенных между собой отдельных направляющих 300, которые могут быть выполнены с одной и той же стороны корпуса 100 или с разных сторон корпуса 100 в транспортном средстве 500, показанном на фиг. 5, может совершать перемещение под управлением управляющего устройства транспортного средства 500 по одной или более частей указанной составной направляющей корпуса 100.
Кроме того, как показано на фиг. 5, по меньшей мере один или каждый из летательных аппаратов 200, установленных по меньшей мере на одной или каждой из составных направляющих корпуса 100, может быть перемещен под управлением управляющего устройства транспортного средства 500 по длине указанной составной направляющей корпуса 100 с обеспечением остановки или размещения с любой из сторон корпуса 100, снабженных каждая одной из частей указанной составной направляющей корпуса 100.
В одном из вариантов реализации настоящего изобретения корпус 100 в воздушном транспортном средстве 500, показанном на фиг. 5, может быть снабжен с каждой из своих сторон одной или более прямолинейными направляющими 300 (например, одной, двумя, тремя, четырьмя, пятью, шестью, семью, девятью, десятью и большим количеством прямолинейных направляющих 300 в зависимости от геометрических размеров корпуса 100), а каждый из летательных аппаратов 200, который должен быть состыкован или соединен с корпусом 100, может быть выполнен с возможностью входа в неразъемное или разъемное взаимодействие с одним из модулей 400 стыковки при стыковке или соединении с корпусом 100 под управлением управляющего устройства транспортного средства 500 с обеспечением возможности перемещения на указанном модуле 400 стыковки по направляющей 300, на которой установлен указанный модуль 400 стыковки, во взаимодействие с которым вошел указанный летательный аппарат 200.
Как показано на фиг. 5 слева, летательные аппараты 200, состыкованные или соединенные с корпусом 100, размещены по две штуки на соответствующих модулях 400 стыковки на каждой из трех направляющих 300, выполненных или установленных на верхней части корпуса 100 (например, на крыше корпуса 100), таким образом, что летательные аппараты 200 на каждой из указанных направляющих 300 расположены на заданном расстоянии друг от друга (например, на одинаковом или равном расстоянии друг от друга), а управляющее устройство транспортного средства 500 может установить связь с модулями управления указанных летательных аппаратов 200 с обеспечением возможности по существу одновременного или последовательного (друг за другом через заданный период времени) перемещения указанных летательных аппаратов 200 на соответствующих модулях 400 стыковки по соответствующим направляющим 300 по отношению друг к другу или по отношению к корпусу 100 с обеспечением возможности размещения по меньшей мере части из указанных перемещаемых летательных аппаратов с разных сторон корпуса 100 (см. фиг. 5 справа).
Таким образом, как показано на фиг. 5 слева, летательные аппараты 200, состыкованные или соединенные с корпусом 100 в транспортном средстве 500, показанном на фиг. 5, могут быть по меньшей мере частично или полностью размещены на соответствующих направляющих 300 с одной из сторон корпуса 100 с использованием соответствующих модулей 400 стыковки.
Как показано на фиг. 5 справа, перед взлетом транспортного средства 500, перед посадкой транспортного средства 500 и/или в процессе перемещения по воздуху или полета транспортного средства 500 управляющее устройство транспортного средства 500 устанавливает связь с модулями управления летательных аппаратов 200, состыкованных или соединенных с корпусом 100, с обеспечением возможности по существу одновременного или последовательного (друг за другом через заданный период времени) перемещения указанных летательных аппаратов 200 на соответствующих модулях 400 стыковки по направляющим 300 по отношению друг к другу с обеспечением размещения указанных перемещенных летательных аппаратов 200 с разных сторон корпуса 100, на каждой из которых могут быть размещены один или более перемещенных летательных аппаратов 200. В частности, при одновременном или последовательном перемещении летательных аппаратов 200 на соответствующих модулях 400 стыковки по отношению друг к другу под управлением управляющего устройства транспортного средства 500 в транспортном средстве 500, показанном на фиг. 5, каждый из указанных перемещаемых летательных аппаратов 200 по сути совершает перемещение по корпусу 100 с использованием одной из направляющих 300, которыми снабжен корпус 100, по отношению по меньшей мере к одному другому (референтному или опорному) летательному аппарату из летательных аппаратов 200, состыкованных или соединенных с корпусом 100. В одном из вариантов реализации настоящего изобретения управляющее устройство транспортного средства 500 в транспортном средстве 500, показанном на фиг. 5, может выдавать управляющие инструкции на модуль управления каждого из одного или более летательных аппаратов 200, состыкованных или соединенных с корпусом 100, с обеспечением возможности перемещения указанного летательного аппарата 200 на соответствующем модуле 400 стыковки по одной или более направляющих 300 по отношению к одному или более других летательных аппаратов из летательных аппаратов 200, состыкованных или соединенных с корпусом 100, при этом указанные один или более других летательных аппаратов выполняют каждый функцию референтного или опорного летательного аппарата на корпусе 100 для указанного перемещаемого летательного аппарата 200. В одной из разновидностей данного варианта реализации настоящего изобретения в транспортном средстве 500, показанном на фиг. 5, под управлением управляющего устройства транспортного средства 500 по корпусу 100 с использованием соответствующих подвижных модулей 400 стыковки, установленных на направляющих 300, может быть перемещен по меньшей мере один или каждый из летательных аппаратов 200, состыкованных или соединенных с корпусом 100, при этом в качестве референтного или опорного летательного аппарата на корпусе 100 для указанного перемещаемого летательного аппарата 200 может быть использован любой один другой из остальных летательных аппаратов, входящих в состав указанных летательных аппаратов 200, состыкованных или соединенных с корпусом 100, или в качестве референтных или опорных летательных аппаратов на корпусе 100 могут быть использованы любые два или более других из указанных остальных летательных аппаратов 200. Следует отметить, что в данной разновидности варианта реализации настоящего изобретения для разных летательных аппаратов 200, перемещаемых по корпусу 100 в транспортном средстве 500, показанном на фиг. 5, с использованием соответствующих подвижных модулей 400 стыковки, установленных на соответствующих направляющих 300, в качестве референтного или опорного летательного аппарата на корпусе 100 может быть использован один и тот же или отдельный (отличный от других) летательный аппарат из летательных аппаратов 200, состыкованных или соединенных с корпусом 100. В другом варианте реализации настоящего изобретения управляющее устройство транспортного средства 500 в транспортном средстве 500, показанном на фиг. 5, может выдавать управляющие инструкции на модуль управления каждого из двух или более летательных аппаратов 200, состыкованных или соединенных с корпусом 100, с обеспечением возможности одновременного или совместного перемещения указанных летательных аппаратов 200 на соответствующих подвижных модулях 400 стыковки, установленных на соответствующих направляющих 300, по отношению к одному и тому же летательному аппарату 200 на корпусе 100, являющемуся референтным или опорным для указанного перемещаемого летательного аппарата 200.
Следует отметить, что перемещение по меньшей мере одного или каждого из летательных аппаратов 200, состыкованных или соединенных с корпусом 100 в транспортном средстве 500, показанном на фиг. 5, на соответствующих подвижных модулях 400 стыковки, установленных на соответствующих направляющих 300, под управлением управляющего устройства транспортного средства 500 по корпусу 100 по отношению по меньшей мере к одному другому летательному аппарату из указанных летательных аппаратов 200 обеспечивает возможность изменения по меньшей мере одной из летных характеристик транспортного средства 500, показанного на фиг. 3, что в свою очередь позволяет этому транспортному средству 500 занять более сбалансированное или равновесное пространственное положение в воздухе.
Кроме того, как показано на фиг. 5, перед взлетом транспортного средства 500, перед посадкой транспортного средства 500 и/или в процессе перемещения по воздуху или полета транспортного средства 500 летательные аппараты 200, которыми снабжен корпус 100, могут быть размещены на корпусе 100 с разных его сторон (см. фиг. 5 справа) с использованием соответствующих подвижных модулей 400 стыковки, установленных с возможностью перемещения на соответствующих направляющих 300, а управляющее устройство транспортного средства 500 может установить связь с модулями управления указанных летательных аппаратов 200 с обеспечением возможности по существу одновременного или последовательного (друг за другом через заданный период времени) перемещения указанных летательных аппаратов 200 на соответствующих подвижных модулях 400 стыковки, установленных на соответствующих направляющих 300, по указанным направляющим 300 по отношению друг к другу или по отношению к корпусу 100 с обеспечением возможности размещения по меньшей мере части из указанных перемещаемых летательных аппаратов с одной из сторон корпуса 100, в частности на крыше корпуса 100 (см. фиг. 5 слева).
Кроме того, следует также отметить, что управляющее устройство транспортного средства 500 в транспортном средстве 500, показанном на фиг. 5, может выдавать управляющие инструкции по меньшей мере на один из летательных аппаратов 200, состыкованных или соединенных с корпусом 100, с обеспечением возможности выхода указанного летательного аппарата 200 из взаимодействия с крепежными средствами соответствующего одного из модулей 400 стыковки, установленных на соответствующих направляющих 300, которыми снабжен корпус 100, для отстыковки или отсоединения указанного летательного аппарата от указанного модуля 400 стыковки и, следовательно, от направляющей 300 или от корпуса 100, при этом указанный отстыкованный летательный аппарат 200 может быть направлен управляющим устройством транспортного средства 500 в заданное пространственное местоположение в области пространства, в которой находится транспортное средство 500, показанное на фиг. 5.
Представленные иллюстративные варианты осуществления настоящего изобретения, примеры и описание служат лишь для обеспечения понимания сущности заявляемого изобретения и не являются ограничивающими. Иные возможные варианты осуществления настоящего изобретения, либо модификации или улучшения вышеописанных вариантов реализации настоящего изобретения будут ясны специалисту в данной области техники из представленного выше описания. Объем настоящего изобретения ограничен лишь прилагаемой формулой изобретения.


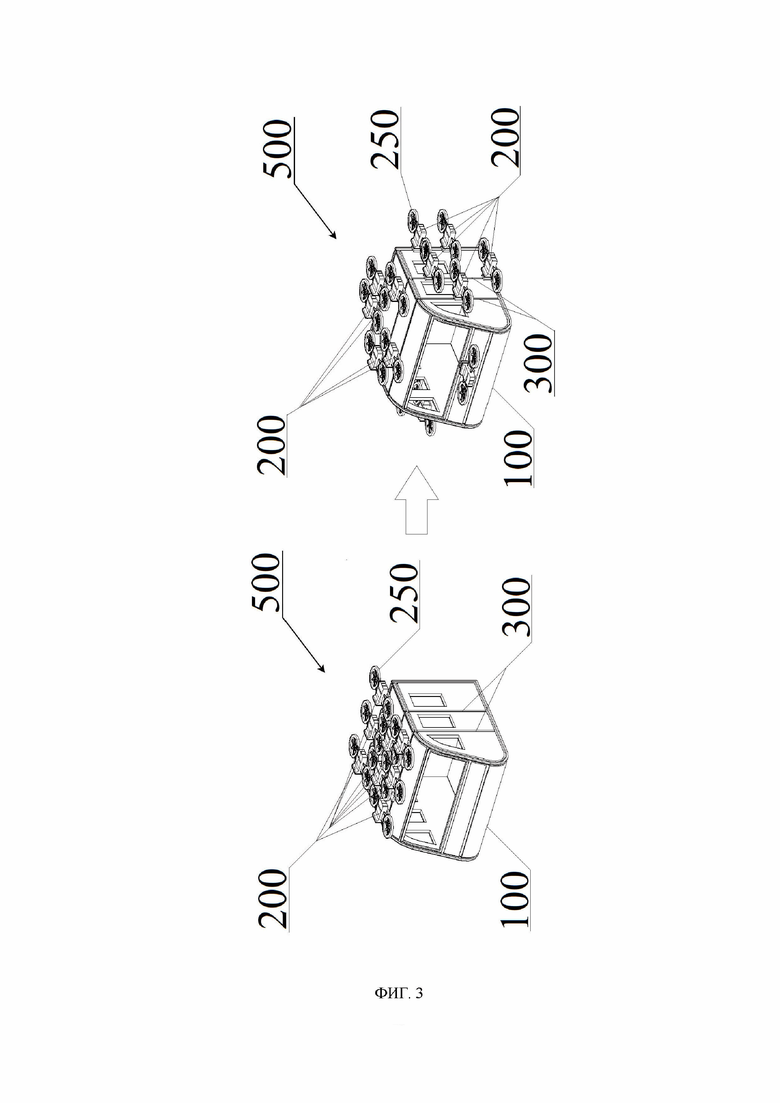

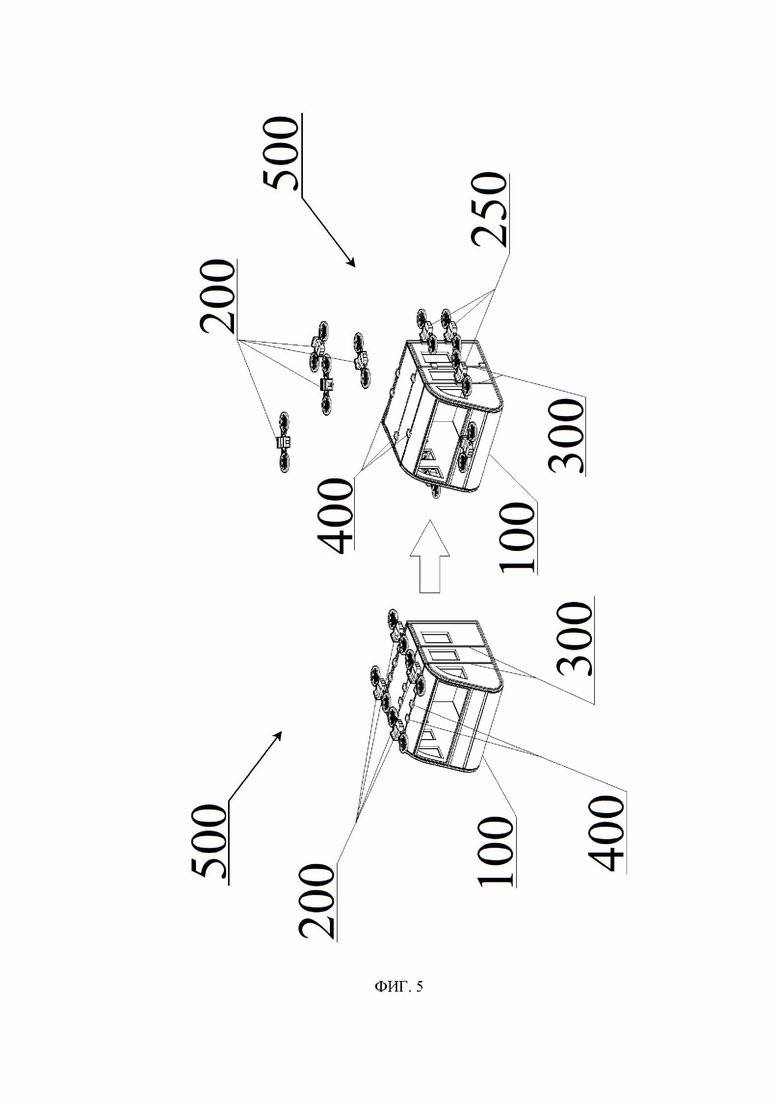
Настоящее изобретение относится к транспортной технике, в частности к средствам для перемещения полезной нагрузки, а именно к воздушным транспортным средствам. Воздушное транспортное средство содержит корпус, выполненный с возможностью соединения с ним двух или более летательных аппаратов с обеспечением возможности изменения положений присоединенных летательных аппаратов на корпусе транспортного средства по отношению друг к другу, и управляющее устройство, выполненное с возможностью установления связи по меньшей мере с двумя из указанных присоединенных летательных аппаратов с обеспечением возможности их управляемого перемещения по корпусу транспортного средства по отношению друг к другу, при управляемом перемещении указанных по меньшей мере двух присоединенных летательных аппаратов по корпусу транспортного средства указанные летательные аппараты оказываются размещенными с по меньшей мере двух боковых сторон корпуса транспортного средства. В результате достигается оптимизация расположения воздушных движителей относительно корпуса воздушного транспортного средства и друг относительно друга в различных режимах полета и в режимах посадки, взлета и стоянки обеспечивается возможность изменения летных характеристик воздушного транспортного средства в полете. 2 н. и 15 з.п. ф-лы, 5 ил.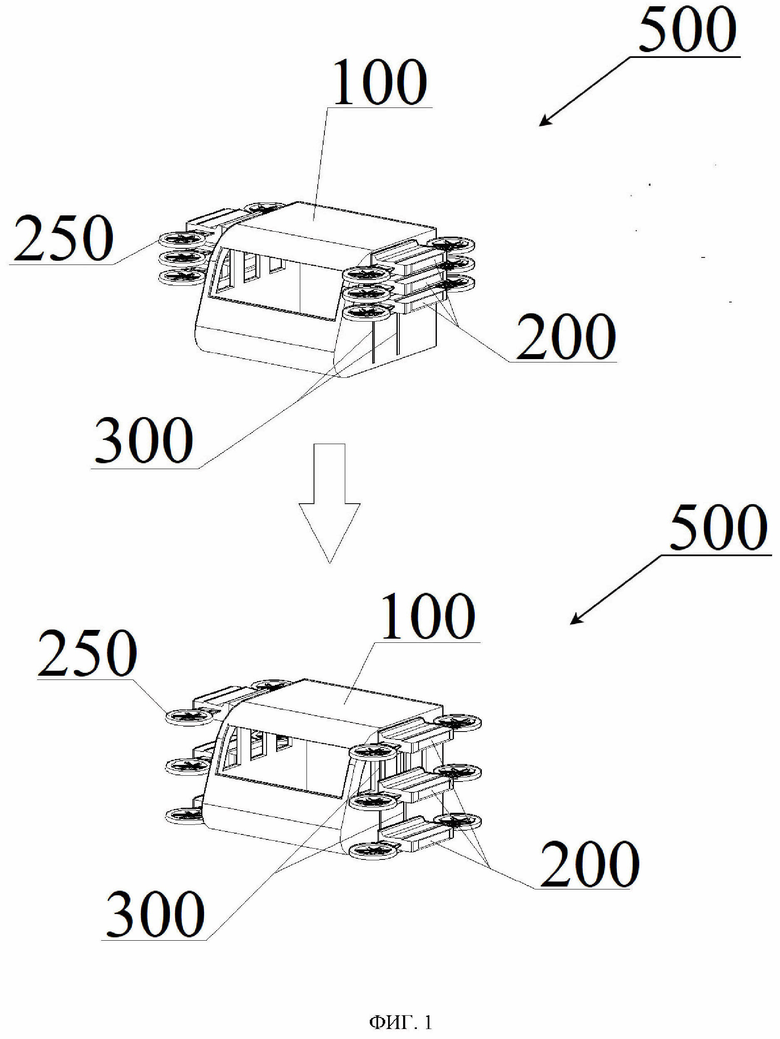
1. Воздушное транспортное средство, содержащее:
корпус, выполненный с возможностью соединения с ним двух или более летательных аппаратов с обеспечением возможности изменения положений присоединенных летательных аппаратов на корпусе транспортного средства по отношению друг к другу, и
управляющее устройство, выполненное с возможностью установления связи по меньшей с двумя из указанных присоединенных летательных аппаратов с обеспечением возможности их управляемого перемещения по корпусу транспортного средства по отношению друг к другу, при управляемом перемещении указанных по меньшей мере двух присоединенных летательных аппаратов по корпусу транспортного средства указанные летательные аппараты оказываются размещенными с по меньшей мере двух боковых сторон корпуса транспортного средства.
2. Воздушное транспортное средство по п. 1, в котором при управляемом перемещении указанных по меньшей мере двух присоединенных летательных аппаратов по корпусу транспортного средства летательные аппараты оказываются размещенными по меньшей мере в двух разных плоскостях корпуса транспортного средства.
3. Воздушное транспортное средство по п. 1, в котором винт в винтовом движителе по меньшей мере в одном из указанных присоединенных летательных аппаратов выполнен складным.
4. Воздушное транспортное средство по п. 1, в котором корпус транспортного средства выполнен с возможностью перемещения через него по меньшей мере одного из указанных присоединенных летательных аппаратов или корпус по меньшей мере одного из летательных аппаратов, которыми снабжен корпус транспортного средства, выполнен с возможностью прохождения через него по меньшей мере части корпуса транспортного средства.
5. Воздушное транспортное средство по п. 1, в котором корпус транспортного средства выполнен с обеспечением возможности одновременного или последовательного перемещения указанных присоединенных летательных аппаратов по отношению к корпусу транспортного средства.
6. Воздушное транспортное средство по п. 1, в котором корпус транспортного средства выполнен с обеспечением возможности прямолинейного или криволинейного перемещения по меньшей мере одного из указанных присоединенных летательных аппаратов по отношению к корпусу транспортного средства.
7. Воздушное транспортное средство по п. 1, в котором корпус транспортного средства выполнен с обеспечением возможности перемещения по меньшей мере одного из указанных присоединенных летательных аппаратов по отношению к корпусу транспортного средства для их размещения друг под другом с одной из сторон корпуса транспортного средства.
8. Воздушное транспортное средство по п. 7, в котором управляющее устройство дополнительно выполнено с обеспечением возможности изменения расстояния между винтами винтовых движителей указанных размещенных друг под другом присоединенных летательных аппаратов.
9. Воздушное транспортное средство по п. 1, в котором корпус транспортного средства выполнен с обеспечением возможности перемещения по меньшей мере двух из указанных присоединенных летательных аппаратов по отношению к корпусу транспортного средства для их размещения на заданном расстоянии друг от друга.
10. Воздушное транспортное средство по п. 1, в котором корпус транспортного средства снабжен одной или более направляющими, по меньшей мере одна из которых выполнена с возможностью соединения с ней по меньшей мере двух из указанных присоединяемых летательных аппаратов с обеспечением возможности их перемещения по направляющей на заданное расстояние друг относительно друга.
11. Воздушное транспортное средство по п. 10, в котором по меньшей мере одна из указанных направляющих закреплена на корпусе транспортного средства или выполнена с ним за одно целое.
12. Воздушное транспортное средство п. 10, в котором по меньшей мере одна из указанных направляющих по меньшей мере частично установлена в корпусе транспортного средства или проходит через него.
13. Воздушное транспортное средство по п. 1, в котором корпус транспортного средства снабжен соединенными между собой направляющими, выполненными с двух или более сторон корпуса, при этом по меньшей мере одна из указанных соединенных между собой направляющих выполнена с возможностью разъемного соединения с ней по меньшей мере двух из указанных присоединенных летательных аппаратов с обеспечением возможности их перемещения по меньшей мере по части из указанных направляющих.
14. Воздушное транспортное средство по п. 1, в котором корпус снабжен одним или более подвижными модулями стыковки, каждый из которых выполнен с возможностью перемещения по отношению к корпусу транспортного средства по заданной траектории под управлением управляющего устройства и по меньшей мере один из которых выполнен с возможностью разъемного соединения с ним по меньшей мере одного из указанных присоединенных летательных аппаратов.
15. Воздушное транспортное средство по п. 1, в котором корпус транспортного средства снабжен двумя или более датчиками веса, каждый из которых выполнен с возможностью измерения веса полезной нагрузки в заданном месте корпуса, а управляющее устройство дополнительно соединено с указанными датчиками веса с возможностью приема от них результатов измерения веса полезной нагрузки для установления распределения полезной нагрузки в корпусе и дополнительно обеспечивает возможность перемещения по меньшей мере двух из указанных присоединенных летательных аппаратов по отношению друг к другу в зависимости от установленного распределения полезной нагрузки в корпусе во время полета воздушного транспортного средства.
16. Воздушное транспортное средство, содержащее:
корпус, снабженный двумя или более летательными аппаратами, соединенными с указанным корпусом, с обеспечением возможности изменения своих положений на корпусе транспортного средства по отношению друг к другу, и
управляющее устройство, выполненное с возможностью управления по меньшей мере двумя из указанных летательных аппаратов с обеспечением возможности их перемещения по корпусу транспортного средства по отношению друг к другу, при управляемом перемещении указанных по меньшей мере двух летательных аппаратов по корпусу транспортного средства указанные летательные аппараты оказываются размещенными с по меньшей мере двух боковых сторон корпуса транспортного средства.
17. Воздушное транспортное средство по п. 16, в котором при управляемом перемещении указанных по меньшей мере двух летательных аппаратов по корпусу транспортного средства по отношению друг к другу указанные летательные аппараты оказываются размещенными по меньшей мере в двух разных плоскостях корпуса транспортного средства.
| US 10860115 B1, 08.12.2020 | |||
| Способ восстановления спиралей из вольфрамовой проволоки для электрических ламп накаливания, наполненных газом | 1924 |
|
SU2020A1 |
| СПАСАТЕЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2020 |
|
RU2752769C1 |
| US 10549850 B1, 04.02.2020 | |||
| МАГНИТНЫЙ ДЕФЕКТОСКОП | 1967 |
|
SU216350A1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ), САМОХОДНЫЙ МОДУЛЬ, ПОЛЕЗНАЯ НАГРУЗКА, СИСТЕМА И СПОСОБ ДЛЯ ПЕРЕМЕЩЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ (ВАРИАНТЫ) | 2022 |
|
RU2798089C1 |
| US 20220041279 A1, 10.02.2022 | |||
| US 20210331794 A1, 28.10.2021. | |||

