ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к авиационной технике, в частности к летательным аппаратам.
УРОВЕНЬ ТЕХНИКИ
В настоящее время широко распространены пилотируемые и беспилотные летательные аппараты с различными конструкциями и движителями, обеспечивающими возможность перемещения таких летательных аппаратов по воздуху. В частности, известны дроны, самолеты, вертолеты, планеры, аэростаты и иные виды воздушных судов, которые способны в той или иной мере осуществлять перемещение в воздухе с использованием одного или более движителей, которыми может быть снабжен корпус таких летательных аппаратов.
Например, в патенте США №6,530,541 (далее US 6530541), опубликованной 11 марта 2003 года, описан летательный аппарат, содержащий: (i) корпус, снабженный емкостью, выполненной с возможностью ее заполнения сжатым воздухом; (ii) модуль управления, выполненный с обеспечением возможности выпуска сжатого воздуха из указанной емкости для создания дополнительной тяги.
Следует отметить, что модуль управления в летательном аппарате, раскрытом в US 6530541, позволяет управлять перемещением этого летательного аппарата по воздуху с использованием крыльев летательного аппарата, что требует больших затрат электроэнергии и, следовательно, установки в корпусе емкого аккумулятора, существенного увеличивающего вес такого летательного аппарата, при этом поток воздуха, выпускаемый из емкости, которой снабжен корпус летательного аппарата, используется лишь для создания дополнительной тяги.
Таким образом, основные недостатки известного летательного аппарата, раскрытого в US 6530541, заключаются, в частности, в повышенном весе такого летательного аппарата и повышенной энергоемкости такого летательного аппарата.
Таким образом, очевидна потребность в дальнейшем совершенствовании известных летательных аппаратов, в частности для уменьшения их веса и уменьшения объема энергии, потребляемой такими летательными аппарата при их эксплуатации.
Следовательно, техническая проблема, решаемая настоящим изобретением, состоит в создании летательных аппаратов, заправочных станций для заправки таких летательных аппаратов, способов перемещения таких летательных аппаратов по воздуху и способов заправки таких летательных аппаратов с использованием заправочных станций, в каждом из которых по меньшей мере частично устранен по меньшей мере один или несколько из обозначенных выше недостатков известных летательных аппаратов, в частности летательного аппарата, раскрытого в US 6530541.
РАСКРЫТИЕ
Задача настоящего изобретения состоит в создании летательных аппаратов, заправочных станций для заправки таких летательных аппаратов, способов перемещения таких летательных аппаратов по воздуху и способов заправки таких летательных аппаратов с использованием заправочных станций, решающих каждый по меньшей мере обозначенную выше техническую проблему, характерную для известного уровня техники, а также состоит в расширении арсенала технических средств, способных перемещаться по воздуху.
Поставленная задача решена в первом аспекте настоящего изобретения благодаря тому, что предложенный летательный аппарат содержит: (i) корпус, снабженный одной или более емкостями, выполненными с возможностью заполнения их текучей средой под давлением; и (ii) модуль управления, выполненный с обеспечением возможности регулируемого выпуска текучей среды по меньшей мере из одной из указанных емкостей для управления перемещением летательного аппарата по воздуху.
Кроме того, поставленная задача решена во втором аспекте настоящего изобретения благодаря тому, что предложенный летательный аппарат содержит: (i) надувной корпус, выполненный с возможностью заполнения текучей средой под давлением; и (ii) модуль управления, выполненный с обеспечением возможности регулируемого выпуска текучей среды из надувного корпуса для управления перемещением летательного аппарата по воздуху.
Кроме того, поставленная задача решена в третьем аспекте настоящего изобретения благодаря тому, что предложенный летательный аппарат содержит: (i) корпус, содержащий одну или более изолированных полостей, выполненных с возможностью заполнения текучей средой под давлением; и (ii) модуль управления, выполненный с обеспечением возможности регулируемого выпуска текучей среды по меньшей мере из одной из указанных полостей для управления перемещением летательного аппарата по воздуху.
Кроме того, поставленная задача решена в четвертом аспекте настоящего изобретения благодаря тому, что предложенная заправочная станция для заправки летательного аппарата согласно первому аспекту настоящего изобретения содержит: по меньшей мере одно средство подачи текучей среды, выполненное с возможностью разъемного подключения по меньшей мере к одной из емкостей летательного аппарата с обеспечением возможности заполнения текучей средой под давлением указанной по меньшей мере одной емкости летательного аппарата.
Кроме того, поставленная задача решена в пятом аспекте настоящего изобретения благодаря тому, что предложенная заправочная станция для заправки летательного аппарата согласно второму аспекту настоящего изобретения содержит: по меньшей мере одно средство подачи текучей среды, выполненное с возможностью разъемного подключения к надувному корпусу летательного аппарата с обеспечением возможности заполнения текучей средой под давлением внутреннего пространства надувного корпуса летательного аппарата.
Кроме того, поставленная задача решена в шестом аспекте настоящего изобретения благодаря тому, что предложенная заправочная станция для заправки летательного аппарата согласно третьему аспекту настоящего изобретения содержит: по меньшей мере одно средство подачи текучей среды, выполненное с возможностью разъемного подключения по меньшей мере к одной из изолированных полостей корпуса летательного аппарата с обеспечением возможности заполнения текучей средой под давлением указанной по меньшей мере одной изолированной полости корпуса летательного аппарата.
Кроме того, поставленная задача решена в седьмом аспекте настоящего изобретения благодаря тому, что предложенный способ перемещения летательного аппарата согласно первому аспекту настоящего изобретения по воздуху включает этапы, согласно которым: (i) определяют, посредством навигационного модуля, пространственные координаты летательного аппарата в реальном времени; и (ii) регулируют, посредством модуля управления, выпуск текучей среды по меньшей мере из одной из емкостей летательного аппарата на основании указанных определенных пространственных координат для управления перемещением летательного аппарата по воздуху.
Кроме того, поставленная задача решена в восьмом аспекте настоящего изобретения в седьмом аспекте настоящего изобретения благодаря тому, что предложенный способ перемещения летательного аппарата согласно второму аспекту настоящего изобретения по воздуху включает этапы, согласно которым: (i) определяют, посредством навигационного модуля, пространственные координаты летательного аппарата в реальном времени; и (ii) регулируют, посредством модуля управления, выпуск текучей среды из надувного корпуса на основании указанных определенных пространственных координат для управления перемещением летательного аппарата по воздуху.
Кроме того, поставленная задача решена в девятом аспекте настоящего изобретения в седьмом аспекте настоящего изобретения благодаря тому, что предложенный способ перемещения летательного аппарата согласно третьему аспекту настоящего изобретения по воздуху включает этапы, согласно которым: (i) определяют, посредством навигационного модуля, пространственные координаты летательного аппарата в реальном времени; и (ii) регулируют, посредством модуля управления, выпуск текучей среды по меньшей мере из одной из полостей корпуса на основании указанных определенных пространственных координат для управления перемещением летательного аппарата по воздуху.
Кроме того, поставленная задача решена в десятом аспекте настоящего изобретения благодаря тому, что предложенный способ заправки летательного аппарата согласно первому аспекту настоящего изобретения текучей средой под давлением с использованием заправочной станции согласно четвертому аспекту настоящего изобретения включает этапы, согласно которым: (i) разъемно подключают по меньшей мере одно средство подачи текучей среды заправочной станции по меньшей мере к одной из емкостей летательного аппарата; и (ii) заполняют, посредством указанного по меньшей мере одного подключенного средства подачи текучей среды, текучей средой под давлением в указанную по меньшей мере одну емкость летательного аппарата.
Кроме того, поставленная задача решена в одиннадцатом аспекте настоящего изобретения благодаря тому, что предложенный способ заправки летательного аппарата согласно второму аспекту настоящего изобретения текучей средой под давлением с использованием заправочной станции согласно пятому аспекту настоящего изобретения включает этапы, согласно которым: (i) разъемно подключают по меньшей мере одно средство подачи текучей среды заправочной станции к надувному корпусу летательного аппарата; и (ii) заполняют, посредством указанного по меньшей мере одного подключенного средства подачи текучей среды, текучей средой под давлением внутреннее пространство надувного корпуса летательного аппарата.
Кроме того, поставленная задача решена в двенадцатом аспекте настоящего изобретения благодаря тому, что предложенный способ заправки летательного аппарата согласно третьему аспекту настоящего изобретения текучей средой под давлением с использованием заправочной станции согласно шестому аспекту настоящего изобретения включает этапы, согласно которым: (i) разъемно подключают по меньшей мере одно средство подачи текучей среды заправочной станции по меньшей мере к одной из изолированных полостей корпуса летательного аппарата; и (ii) заполняют, посредством по меньшей мере одного средства подачи текучей среды заправочной станции, текучей средой под давлением указанную по меньшей мере одну изолированную полость корпуса летательного аппарата.
Кроме того, поставленная задача решена в тринадцатом аспекте настоящего изобретения благодаря тому, что предложенная заправочная станция содержит приемную камеру, выполненную с возможностью размещения в ней летательного аппарата согласно первому аспекту настоящего изобретения, летательного аппарата согласно второму аспекту настоящего изобретения и/или летательного аппарата согласно третьему аспекту настоящего изобретения и дополнительно выполненную с возможностью подачи в нее текучей среды под давлением с обеспечением возможности по меньшей мере частичного восполнения запаса хода соответственно летательного аппарата согласно первому аспекту настоящего изобретения, летательного аппарата согласно второму аспекту настоящего изобретения и/или летательного аппарата согласно третьему аспекту настоящего изобретения.
Вышеописанные аспекты настоящего изобретения, от первого до двенадцатого включительно, обеспечивают каждый технический результат, заключающийся в повышении универсальности летательного аппарата и совершенствовании управления перемещением летательного аппарата по воздуху. Вышеуказанные технические преимущества заявленной группы изобретений не являются ограничивающими. Дополнительные преимущества заявленной группы изобретений и отдельных изобретений в указанной группе, в том числе их частных вариантов реализации, будут ясны специалисту из приведенного ниже подробного описания настоящего изобретения и прилагаемых чертежей.
Кроме того, вышеописанные аспекты настоящего изобретения, от первого до двенадцатого включительно, обеспечивают каждый дополнительные технические результаты, заключающиеся в упрощении конструкции летательного аппарата, уменьшении габаритных размеров летательного аппарата и уменьшении веса летательного аппарата.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прилагаемые чертежи, которые приведены для обеспечения лучшего понимания сущности настоящего изобретения, составляют часть настоящего документа и включены в него для иллюстрации нижеописанных вариантов реализации и аспектов настоящего изобретения. Прилагаемые чертежи в сочетании с приведенным ниже описанием служат для пояснения сущности настоящего изобретения. На чертежах:
на фиг. 1 показан первый иллюстративный вариант реализации летательного аппарата согласно настоящему изобретению;
на фиг. 2 показана одна из разновидностей первого иллюстративного варианта реализации летательного аппарата согласно настоящему изобретению, показанного на фиг. 1;
на фиг. 3 показан второй иллюстративный вариант реализации летательного аппарата согласно настоящему изобретению;
на фиг. 4 показан третий иллюстративный вариант реализации летательного аппарата согласно настоящему изобретению;
на фиг. 5 показан первый иллюстративный вариант реализации заправочной станции согласно настоящему изобретению для заправки летательного аппарата, показанного на фиг. 3;
на фиг. 6 показан второй иллюстративный вариант реализации заправочной станции согласно настоящему изобретению для заправки летательного аппарата, показанного на фиг. 4;
на фиг. 7 показан третий иллюстративный вариант реализации заправочной станции согласно настоящему изобретению для заправки летательного аппарата, показанного на фиг. 1-2;
на фиг. 8 показана блок-схема первого иллюстративного варианта реализации способа согласно настоящему изобретению для перемещения летательного аппарата, показанного на фиг. 1-2, по воздуху;
на фиг. 9 показана блок-схема второго иллюстративного варианта реализации способа согласно настоящему изобретению для перемещения летательного аппарата, показанного на фиг. 3, по воздуху;
на фиг. 10 показана блок-схема третьего иллюстративного варианта реализации способа согласно настоящему изобретению для перемещения летательного аппарата, показанного на фиг. 4, по воздуху;
на фиг. 11 показана блок-схема первого иллюстративного варианта реализации способа согласно настоящему изобретению для заправки летательного аппарата, показанного на фиг. 1-2, текучей средой под давлением с использованием заправочной станции, показанной на фиг. 7;
на фиг. 12 показана блок-схема второго иллюстративного варианта реализации способа согласно настоящему изобретению для заправки летательного аппарата, показанного на фиг. 3, текучей средой под давлением с использованием заправочной станции, показанной на фиг. 5; и
на фиг. 13 показана блок-схема третьего иллюстративного варианта реализации способа согласно настоящему изобретению для заправки летательного аппарата, показанного на фиг. 4, текучей средой под давлением с использованием заправочной станции, показанной на фиг. 6.
ОСУЩЕСТВЛЕНИЕ
Ниже со ссылкой на прилагаемые чертежи описаны некоторые примеры возможных вариантов реализации настоящего изобретения, при этом не следует считать, что приведенное ниже описание определяет или ограничивает объем настоящего изобретения.
В приведенном ниже описании хорошо известные функции или конструкции не описаны подробно, поскольку это может завуалировать неважными сведениями сущность настоящего изобретения.
Следует понимать, что в приведенном далее описании термины, такие как «первый», «второй», «верхний», «нижний», «боковой», «передний», «задний» и т.п., использованы исключительно для удобства, при этом их не следует толковать как ограничительные термины. В частности, в контексте настоящего изобретения, если в описании настоящего документа явно не указано иное, термины «первый», «второй», «третий» или т.п. использованы для того, чтобы отличать друг от друга элементы, компоненты, части, узлы, модули, блоки, варианты реализации или т.п., к которым они относятся, а не для целей описания какой-либо конкретной взаимосвязи между ними. Так, например, следует иметь в виду, что использование терминов «первая группа» летательных аппаратов и «вторая группа» летательных аппаратов не подразумевает какого-либо порядка, отнесения к определенному типу, хронологии, иерархии или ранжирования групп летательных аппаратов во множестве или совокупности летательных аппаратов, равно как и их использование (само по себе) не исключает, что дополнительно могут существовать «третья группа» летательных аппаратов, «четвертая группа» летательных аппаратов и т.п. В дальнейшем, как указано в данном документе в других контекстах, упоминание «первой группы» летательных аппаратов и «второй группы» летательных аппаратов в настоящем документе не исключает возможности того, что в состав этих групп летательных аппаратов могут входить одинаковые летательные аппараты (т.е. летательных аппаратов одного и того же типа), при этом в состав первой и второй групп летательных аппаратов могут входить летательные аппараты, одновременно относящиеся каждый к первой группе летательных аппаратов и второй группе летательных аппаратов. Например, в некоторых случаях летательные аппараты в «первой группе» летательных аппаратов и летательные аппараты во «второй группе» летательных аппаратов могут по меньшей мере частично или полностью совпадать, например, по конструкции или особенностям конструктивного исполнения, типу движителей, размеру, форме и/или т.п., а в других случаях летательные аппараты в «первой группе» летательных аппаратов и летательные аппараты во «второй группе» летательных аппаратов могут и отличаться друг от друга по конструкции или особенностям конструктивного исполнения, типу движителей, размеру, форме и/или т.п.
Следует понимать при упоминании объекта в единственном числе возможно и наличие множества таких объектов и наоборот, если явно не указано иное или иное явным образом не следует из контекста настоящего документа.
Грамматические связи выражают любые или все альтернативные и объединенные сочетания связанных пунктов, предложений, фраз, слов и т.п., если только явно не указано иное или иное явным образом не следует из контекста. Таким образом следует понимать, что термин «или» в целом означает «и/или» и т.п.
Перечисление диапазонов значений в данном документе не является ограничением, поскольку ссылается в индивидуальном порядке на любые или все значения, попадающие в диапазон, если иное не указано в данном документе, при этом каждое отдельное значение в таком диапазоне включено в описание так, как если бы оно было отдельно приведено в данном документе.
Слова «приблизительно», «примерно» или т.п. в сочетании с числовым значением следует толковать как указывающие на возможное отклонение, которое по мнению специалиста в области техники обеспечивало бы надлежащее функционирование для решения необходимой задачи. Диапазоны значений и/или числовые значения приведены в данном документе исключительно в качестве примеров и не ограничивают объем описанных вариантов реализации.
Все примеры, приведенные в данном документе, или по меньшей мере часть из них, равно как и соответствующие слововыражения («например», «такой как», «в частности» или т.п.), по существу использованы для улучшения понимания сущности настоящего изобретения и для обеспечения полноты раскрытия настоящего изобретения, однако эти слововыражения не накладывают каких-либо ограничений на варианты реализации настоящего изобретения, для описания которых они использованы в настоящем документе, в частности не ограничивают практические варианты реализации элементов, компонентов, частей, узлов, модулей, блоков, устройств, средств и/или т.п., используемых для раскрытия особенностей конструкции и функционирования настоящего изобретения.
Термины и определения, примененные в описании данного документа
Термин «иллюстративный» означает неограничивающий пример, вариант или иллюстрацию. Аналогичным образом, термины «например» и «в качестве примера», использованные в данном документе, задают перечни из одного или более неограничивающих примеров, вариантов или иллюстраций. Как использовано в данном документе, тактильный элемент «выполнен с возможностью» осуществления функции во всех случаях, когда этот тактильный элемент содержит все электромеханические, информационно-измерительные и управляющие средства с программным кодом (если какой-либо код необходим в работе таких управляющих средств) для осуществления указанной функции независимо от того, является ли исполнение этой функции заблокированным или запрещенным (например, посредством заданной оператором настройки, заводской настройки и т.п.).
В контексте настоящего изобретения термин «соответствие» и его производные (т.е. прилагательное, глагол, наречие) не обязательно означает точную согласованность или точное равенство в чем-либо, чему-либо или между чем-либо в каком-либо отношении, а может подразумевать отхождение или отклонение от указанного равенства в заданных пределах. Например, термин «соответствующие координаты», если из описания настоящего документа явно не следует иное, означает не только, что эти координаты могут быть точно равны друг другу или могут точно совпадать, но и подразумевает, что указанное равенство или совпадение координат может быть установлено с некоторой погрешностью (например, с погрешностью работы GPS-системы) или в рамках заданной географической области, окружающей точную географическую точку или область, на которую указывают эти координаты, или точное географическое место, на которое указывают эти координаты.
В контексте настоящего изобретения термин «летательный аппарат» (ЛА), если из описания настоящего документа явно не следует иное, относится к беспилотному воздушному транспортному средству, которое выполнено с возможностью полета или которое способно осуществлять перемещение по воздуху в автоматическом режиме, т.е. без участия человека или внешних источников управления, или способно осуществлять перемещение по воздуху в полуавтоматическом режиме, т.е. получать по меньшей мере часть управляющих команд от человека (например, пилота, оператора и т.п.) или внешнего источника (например, сервера управления или внешнего управляющего устройства) по заданным каналам связи.
В контексте настоящего изобретения термин «модуль», если из описания настоящего документа явно не следует иное, относится к функциональному элементу или совокупности функциональных элементов устройства в виде детали, узла, блока или др. сборочной единицы, которая выполняет определенные технические функции, обеспечивающие выполнение функций устройства. Модуль в целом может быть реализован на практике с использованием сочетания известных конструктивных элементов, сочетания известных конструктивных элементов и известных аппаратных средств, сочетания известных конструктивных элементов и известных программно-аппаратных средств или сочетания известных аппаратных средств и известных программных средств. Кроме того, каждый из модулей или по меньшей мере один из них также может быть реализован в виде комбинации аппаратного и программного обеспечения, при этом одни функциональные возможности, описанные в настоящем документе в отношении одного из модулей, могут быть реализованы только за счет аппаратного обеспечения, а другие функциональные возможности, описанные в настоящем документе в отношении того же самого модуля или иного модуля, могут быть реализованы путем использования аппаратного обеспечения в сочетании с программным обеспечением.
В контексте настоящего изобретения термин «модуль управления», если из описания настоящего документа явно не следует иное, представляет собой физическое устройство, аппарат или множество модулей, выполненных с использованием аппаратного обеспечения, например с помощью интегральной схемы специального назначения (ASIC), программируемой логической интегральной схемы (FPGA) или с помощью комбинации аппаратного и программного обеспечения, такой как, например, микропроцессорная система и набор инструкций, реализующих функциональные возможности модуля управления, которые (при их выполнении) трансформируют микропроцессорную систему в устройство или систему специального назначения (например, автопилот). Кроме того, любой из модулей, описанных в данном документе, или по меньшей мере один из них может быть реализован в виде комбинации аппаратного и программного обеспечения, при этом одни функциональные возможности, описанные в настоящем документе в отношении одного из указанных модулей, могут быть реализованы только за счет аппаратного обеспечения, а другие функциональные возможности, описанные в настоящем документе в отношении того же самого модуля или иного модуля из указанных модулей, могут быть реализованы путем использования аппаратного обеспечения в сочетании с программным обеспечением.
В контексте настоящего изобретения термин «навигационная команда», если из описания настоящего документа явно не следует иное, относится к инструкции, направляемой летательным аппаратам, описанным в данном документе. Навигационные команды могут быть выданы или обеспечены системой управления полетом летательного аппарата в виде цифровых или аналоговых данных инструкций или управляющих сигналов. Навигационные команды могут быть первоначально сгенерированы, без ограничения, автооператором, оператором (как локально, так и удаленно) и/или системой обхода препятствий. Навигационные команды могут быть сообщены, например, модулю управления для управления летательным аппаратом или системе управления направлением перемещения летательного аппарата по воздуху.
В контексте настоящего изобретения термин «база данных», если из описания настоящего документа явно не следует иное, подразумевает под собой любой структурированный набор данных, не зависящий от конкретной структуры, программного обеспечения по управлению базой данных, аппаратного обеспечения компьютера, на котором данные хранятся, используются или иным образом оказываются доступны для использования. База данных может находиться на том же оборудовании, выполняющем процесс, который сохраняет или использует информацию, хранящуюся в базе данных, или же она может находиться на отдельном оборудовании, например, выделенном сервере или на множестве серверов.
В контексте настоящего изобретения термин «управляющее устройство» относится к вычислительному оборудованию, исполняющему компьютерную программу для обеспечения возможности получения запросов (например, от других вычислительных устройств) по сети связи, возможности выполнения или обработки таких запросов и/или возможности отправки таких запросов по сети связи (например, на другие вычислительные устройства). Вычислительное оборудование, исполняющее компьютерную программу, может представлять собой, без ограничения, один физический компьютер или одну физическую компьютерную систему. В контексте настоящего изобретения использование термина «управляющее устройство» не означает, что каждая вычислительная задача (например, полученные инструкции или команды) или любая иная конкретная задача будут получены, выполнены или послужат причиной выполнения одним и тем же управляющим устройством (т.е. одним и тем же программным и/или аппаратным обеспечением), что означает, что любое количество элементов программного обеспечения или аппаратного обеспечения может быть вовлечено в получение/отправку, выполнение или может послужить причиной для выполнения любой задачи или запроса, или последствий любой задачи или запроса, при этом все это программное и аппаратное обеспечение может быть реализовано в виде одного или нескольких управляющих устройств.
В контексте настоящего изобретения термин «сервер» относится к вычислительному оборудованию, исполняющему компьютерную программу для обеспечения возможности получения запросов (например, от других вычислительных устройств) по сети связи, возможности выполнения или обработки таких запросов и/или возможности отправки таких запросов по сети связи (например, на другие вычислительные устройства). Вычислительное оборудование, исполняющее компьютерную программу, может представлять собой, без ограничения, один физический компьютер или одну физическую компьютерную систему. В контексте настоящего изобретения использование термина «сервер» не означает, что каждая вычислительная задача (например, полученные инструкции или команды) или любая иная конкретная задача будут получены, выполнены или послужат причиной выполнения одним и тем же сервером (т.е. одним и тем же программным и/или аппаратным обеспечением), что означает, что любое количество элементов программного обеспечения или аппаратного обеспечения может быть вовлечено в получение/отправку, выполнение или может послужить причиной для выполнения любой задачи или запроса, или последствий любой задачи или запроса, при этом все это программное и аппаратное обеспечение может быть реализовано в виде одного или нескольких серверов.
В контексте настоящего изобретения термин «заправочная станция», если из описания настоящего документа явно не следует иное, относится к устройству (подвижному или неподвижному) или установке (подвижной или неподвижной), выполненной с обеспечением возможности восполнения запаса хода летательного аппарата путем подачи текучей среды во внутреннее пространство корпуса летательного аппарата, выполненное с возможностью его заполнения текучей средой, управляемый выпуск которой из корпуса летательного аппарата обеспечивает возможность управления перемещением этого летательного аппарата по воздуху.
Первый вариант реализации летательного аппарата
На фиг. 1 показан один из вариантов реализации летательного аппарата 500-1 согласно первому аспекту настоящего изобретения, который по сути является альтернативным вариантом реализации нижеописанного летательного аппарата 500-2, показанного на фиг. 3, или нижеописанного летательного аппарата 500-3, показанного на фиг. 4.
Как показано на фиг. 1, летательный аппарат 500-1 содержит корпус 100, в котором размещены модуль 120 связи, выполненный с возможностью установления связи с внешними источниками данных или внешними управляющими устройствами с обеспечением возможности взаимного обмена данными, навигационный модуль 130, выполненный с возможностью определения пространственного местоположения или пространственных координат летательного аппарата 500-1 в реальном времени, и модуль ПО управления, соединенный с возможностью обмена данными с модулем 120 связи и навигационным модулем 130.
Корпус 100 в летательном аппарате 500-1, показанном на фиг. 1, может иметь любые подходящие форму и габаритные размеры, которые придают в уровне техники любому известному беспилотному летательному аппарату, и может быть выполнен из любого подходящего материала, известного в уровне техники и обычно используемого для изготовления корпусов беспилотных летательных аппаратов (например, из композитного материала). Таким образом, тип, форма, габаритные размеры и материал корпуса 100 в летательном аппарате 500-1 никак конкретно не ограничены. В частности, корпус 100 может иметь форму, схожую с насекомым, птицей, пауком, животным, растением и т.п., при этом специалисту в данной области техники должно быть очевидно, что корпус 100 может иметь любую другую форму, похожую на любой другой известный летательный аппарат или объект природы, известный в уровне техники.
В одном из вариантов реализации настоящего изобретения корпус 100 в летательном аппарате 500-1, показанном на фиг. 1, может представлять собой каркас или несущую раму, на которой может быть закреплена обшивка или которая может быть по меньшей мере частично окружена оболочкой, при этом корпус 100 может быть дополнительно снабжен оперением, крылом, крыльями, винтом, движителем, силовой установкой и/или т.п. в зависимости от конкретного варианта исполнения корпуса 100.
В другом варианте реализации настоящего изобретения корпус 100 в летательном аппарате 500-1, показанном на фиг. 1, может быть выполнен из металла, пластика, композитного материала (например, из композитных сэндвич-панелей), алюминиевого материала (например, из алюминиевых сэндвич-панелей), титанового материала (например, из сэндвич-панелей из титана), резины, наноматериала или любого иного подходящего материала, известного в уровне техники, в том числе с использованием любого подходящего сочетания перечисленных материалов (например, сэндвич панель из титана с алюминиевым сотовым сердечником).
Модуль 110 управления соединен с навигационным модулем 130 с обеспечением возможности управления работой навигационного модуля 130 и соединен с модулем 120 связи с обеспечением возможности управления работой модуля 120 связи.
Навигационный модуль 130 может быть выполнен в виде любого подходящего модуля определения местоположения, известного в уровне техники, или в виде любой подходящей системы определения местоположения, известной в уровне техники. Например, навигационный модуль 130 может быть реализован в виде GPS-системы, Глонасс-системы, Beidou-системы, радара или любой иной подходящей системы определения местоположения, известной в уровне техники, выполненной с возможностью определения пространственных координат летательного аппарата 500-1 в реальном времени.
В одном из вариантов реализации настоящего изобретения навигационный модуль 130 может определять пространственное местоположение летательного аппарата 500-1 как смещение летательного аппарата 500-1 по меньшей мере по одной из трех координатных осей (в частности, по одной координатной оси, двум координатным осям или сразу трем координатным осям) по отношению к опорному (референтному) пространственному местоположению (может соответствовать, например, местоположению опорного сигнального маяка), по меньшей мере одному опорному (референтному) летательному аппарату или по меньшей мере одному опорному (подвижному или неподвижному) пункту.
Навигационный модуль 130 также выполнен с возможностью выдачи определенных пространственных координат летательного аппарата 500-1 на управляющий модуль 110 в реальном времени для их обработки модулем 110 управления, что позволяет контролировать и отслеживать пространственное положение летательного аппарата 500-1 в реальном времени, и дополнительно соединен с модулем 120 связи с обеспечением возможности выдачи определенных пространственных координат летательного аппарата 500-1 на внешнее запоминающее устройство (не показано) или внешнее управляющее устройство (не показано) в реальном времени.
Как показано на фиг. 1, корпус 100 снабжен со своей внешней стороны двумя емкостями 300 для текучей среды и двумя соплами 200.
Каждое из двух сопел 200 конструктивно соединено с возможностью отсоединения (т.е. разъемно соединено) с соответствующей одной из емкостей 300 и сообщается с указанной емкостью 300 посредством текучей среды с обеспечением возможности ускорения потока текучей среды, подаваемой в указанное сопло 200 из указанной емкости 300 под управлением модуля ПО управления, при прохождении указанной подаваемой текучей среды через указанное сопло 200. Таким образом, каждая из емкостей 300, показанных на фиг. 1, может быть отсоединена от соответствующего одного из сопел 200 для ее замены, технического обслуживания и/или повторного заполнения.
Каждая из двух емкостей 300 выполнена с возможностью ее заполнения текучей средой под давлением. Другими словами, обе емкости 300, после их заполнения текучей средой, содержат каждая указанную текучую среду под заданным давлением, при этом в качестве такой текучей среды использована газообразная среда в виде гелия. Следует отметить, что использование гелия в качестве текучей среды для заполнения обоих емкостей 300 упрощает отрыв летательного аппарата 500-1 от поверхности, на которой он оказался первоначально размещенным перед его запуском в воздушное пространство, повышает несущую способность летательного аппарата 500-1 (в частности, за счет создания повышенной подъемной силы) и упрощает управление скоростью и направлением перемещения летательного аппарата 400 в процессе перемещения по воздуху или полета летательного аппарата 500-1, что обусловлено низкой плотностью гелия (Не) по сравнению с воздухом (О2). По меньшей мере одна или каждая из емкостей 300 может представлять собой, например, пневматический баллон, выполненный с возможностью наполнения его текучей средой под давлением и с возможностью управляемого выпуска из него указанной текучей среды под давлением. Кроме того, емкости 300, входящие в состав летательного аппарата 500-1, могут также называться в уровне техники резервуарами, вместилищами, хранилищами, сосудами и т.п. для наполнения или заполнения текучей средой.
Следует отметить, что соединительные средства (не показаны), обеспечивающие возможность сообщения емкостей 300 с соответствующими соплами 200 посредством текучей среды могут быть выполнены за одно целое с емкостями 300 с обеспечением возможности их подключения к соплам 200, могут быть выполнены за одно целое с соплами 200 с обеспечением возможности подключения к ним емкостей 300 или могут представлять собой отдельные соединительные элементы (например, одну или более соединительных трубок), подключаемые к емкостям 300 и соплам 200.
Каждая из емкостей 300, входящих в состав летательного аппарата 500-1, снабжена одним или более выпускными отверстиями (не показаны) для выпуска текучей среды, которые снабжены каждое управляемым клапаном (не показан), при этом модуль ПО управления дополнительно соединен с управляемыми клапанами емкостей 300 с обеспечением возможности управления их работой для регулирования выпуска текучей среды из емкостей 300. В частности, модуль ПО управления может управлять открытием и закрытием управляемых клапанов емкостей 300, что позволяет (i) полностью прекращать подачу текучей среды из емкостей 300 в соответствующие сопла 200, (ii) подавать текучую среду под давлением из обоих емкостей 300 в соответствующие сопла 200 с поддержанием максимального расхода текучей среды или заданного (ограниченного) расхода текучей среды (при этом значения расхода текучей среды, подаваемой в сопла 200, могут совпадать или отличаться друг от друга), или (iii) подавать текучую среду под давлением только из одной из емкостей 300 в соответствующее одно из сопел 200 с поддержанием максимального расхода текучей среды или заданного (ограниченного) расхода текучей среды.
Таким образом, модуль ПО управления, принимающий пространственные координаты летательного аппарата 500-1 в реальном времени от навигационного модуля 130, выполнен с обеспечением возможности регулируемого выпуска текучей среды по меньшей мере из одной из емкостей 300 или из каждой из емкостей 300 путем управления работой клапанов емкостей 300 для управления перемещением летательного аппарата 500-1 по воздуху (т.е. управления полетом летательного аппарата 500-1) в зависимости от указанных принятых координат летательного аппарата 500-1, при этом маршрут полета летательного аппарата 500-1 или пункт назначения летательного аппарата 500-1 может быть предварительно сохранен во внутреннем запоминающем устройстве летательного аппарата 500-1, предварительно загружен в память модуля ПО управления или принят (предварительно до начала полета или уже в процессе полета), посредством модуля 120 связи, от внешнего управляющего устройства (не показано).
Каждая из емкостей 300, входящих в состав летательного аппарата 500-1, может быть выполнена с возможностью ее повторного заполнения текучей средой под давлением. Другими словами, после выпуска всей или по существу всей текучей среды из емкости 300 она может быть повторно заполнена той же самой или иной текучей средой, например, с использованием нижеописанной заправочной станции (не показана). В частности, для повторного заполнения текучей средой каждой из емкостей 300 указанная емкость 300 дополнительно снабжена заправочным клапаном, выполненный с обеспечением возможности подключения указанной емкости 300 к заправочной станции (не показана), заправочному баллону с необходимой текучей средой или любым иным известным в уровне техники средствам заправки емкостей, подходящим для ручной, полуавтоматической или автоматической заправки емкостей 300 текучей средой под давлением. Следует отметить, что заправочный клапан каждой емкости 300 по сути выполнен в виде в виде управляемого клапана, связанного с модулем 110 управления, обеспечивающего возможность управления работой указанного управляемого клапана, то есть возможность переключения клапана между полностью или частично открытым состоянием для заполнения указанной емкости 300 текучей средой и полностью закрытым состоянием, обеспечиваемым модулем ПО управления после завершения процесса заполнения указанной емкости 300 текучей средой.
В различных вариантах реализации настоящего изобретения летательный аппарат 500-1 может быть выполнен одноразовым (с возможностью его однократного использования), то есть может и не быть предусмотрена возможность повторного заполнения по меньшей мере одной из емкостей 300 текучей средой для повторного использования такого летательного аппарата 500-1.
В некоторых вариантах реализации настоящего изобретения по меньшей мере одна или каждая из емкостей 300 может быть дополнительно снабжена одним или более заправочными клапанами, каждый из которых может быть выполнен аналогично вышеописанному заправочному клапану и каждый из которых может быть подключен к заправочной станции (не показана), заправочному баллону с необходимой текучей средой или любым иным известным в уровне техники средствам заправки емкостей, подходящим для ручной, полуавтоматической или автоматической заправки указанной емкости 300 текучей средой под давлением.
В некоторых других вариантах реализации настоящего изобретения управляемые клапаны, установленные в выпускных отверстиях емкостей 300, могут быть дополнительно выполнены с возможностью их использования в качестве заправочных клапанов, состоянием которых управляет модуль 110 управления. Таким образом, в таких вариантах реализации настоящего изобретения по меньшей мере одна или каждая из емкостей 300 может содержать по меньшей мере одно выпускное отверстие, снабженное управляемым клапаном, связанным с модулем ПО управления, обеспечивающим возможность управления работой указанного управляемого клапана или возможность изменения состояния указанного управляемого клапана, и выполненным с обеспечением возможности заполнения текучей средой под давлением указанной емкости 300 и возможности выпуска текучей среды из указанной емкости 300 с поддержанием заданного расхода выпускаемой текучей среды.
В иных вариантах реализации настоящего изобретения по меньшей мере одна или каждая из емкостей 300 может иметь два или более выпускных отверстий (например, два, три, четыре, пять, шесть, семь, восемь, девять, десять и более) для выпуска текучей среды из указанной емкости 300, которые снабжены каждое управляемым клапаном (не показан). В данном варианте реализации настоящего изобретения модуль ПО управления дополнительно соединен с управляемыми клапанами выпускных отверстий емкостей 300, относящимися к указанным емкостям 300, с обеспечением возможности управления их работой или их состоянием для регулирования выпуска текучей среды из емкостей 300, что позволяет выпускать текучую среду по меньшей мере из одной из указанных емкостей 300 или всех емкостей 300 (одновременно или в заданной последовательности) с обеспечением заданного расхода выпускаемой текучей среды. В одной из разновидностей данного варианта реализации настоящего изобретения два или более выпускных отверстий в каждой из емкостей 300 могут сообщаться посредством текучей среды одним из сопел 200, соответствующим указанной емкости 300. В другой разновидности данного варианта реализации настоящего изобретения по меньшей мере одно из выпускных отверстий, выполненных по меньшей мере в одной или каждой из емкостей 300, может сообщаться посредством текучей среды с соплами 200. Следует отметить, что в данном варианте реализации настоящего изобретения и его разновидностях сообщение между соплами 200 и выпускными отверстиями емкостей 300 может быть реализовано с использованием, например, распределительных устройств, работой которых может управлять модуль 110 управления, и соединительных каналов, выполненных каждый в виде, например, трубки, трубопровода, магистрали или любого иного подходящего технического средства, выполненного с возможностью прохождения или пропускания через него текучей среды.
В некоторых иных вариантах реализации настоящего изобретения по меньшей мере одна или каждая из емкостей 300 могут содержать две или более полостей или камер (не показаны), герметично отделенных друг от друга разделительными стенками или разделительными перемычками (перегородками) во внутреннем пространстве указанной емкости, при этом каждая из указанных камер емкости 300 может иметь одно или более выпускных отверстий, снабженных каждое управляемым кланом, управлять работой которого или изменять состояние которого может модуль 110 управления, при этом в указанных камерах может быть размещена одна и та же текучая среда (в частности, текучая среда с одной и той же плотностью, например гелий) или могут быть размещены разные текучие среды (в частности, текучие среды с разной плотностью). В таких вариантах реализации настоящего изобретения модуль 110 управления, соединенный с управляемыми клапанами выпускных отверстий, соответствующих камерам емкостей 300, обеспечивает возможность управления состоянием по меньшей мере одного или каждого из указанных клапанов для регулирования выпуска текучей среды из камер емкостей 300. Таким образом, в таких вариантах реализации настоящего изобретения модуль 110 управления обеспечивает возможность подачи разных текучих сред из камер емкостей 300 в одно и то же сопло 200, по меньшей мере в одно из сопел 200 или каждое из сопел 200 по существу одновременно или в заданной последовательности (например, через заданные промежутки времени) с поддержанием расхода подаваемой текучей среды или подаваемых текучих сред в течение заданного периода времени или изменением расхода подаваемой текучей среды или подаваемых текучих сред через заданный интервал времени.
В различных вариантах реализации настоящего изобретения выпускные отверстия, выполненные по меньшей мере в одной или каждой из емкостей 300, могут быть расположены на заданном расстоянии друг от друга. Таким образом, в таких вариантах реализации настоящего изобретения выпускные отверстия по меньшей мере в одной или в каждой из емкостей 300 могут быть выполнены на заданном расстоянии друг от друга.
В различных иных вариантах реализации настоящего изобретения выпускные отверстия, выполненные по меньшей мере в одной или каждой из емкостей 300, могут быть расположены на противоположных сторонах указанной емкости 300. Таким образом, в таких вариантах реализации настоящего изобретения выпускные отверстия по меньшей мере в одной или в каждой из емкостей 300 могут быть выполнены на противоположных сторонах указанной емкости 300.
В различных других вариантах реализации настоящего изобретения выпускные отверстия, выполненные по меньшей мере в одной или каждой из емкостей 300, могут быть расположены с разных сторон указанной емкости 300. Таким образом, в таких вариантах реализации настоящего изобретения выпускные отверстия по меньшей мере в одной или в каждой из емкостей 300 могут быть выполнены с разных сторон указанной емкости 300.
В одном из вариантов реализации настоящего изобретения в качестве текучей среды, которой может быть заполнена по меньшей мере одна или каждая из емкостей 300, может быть использована по меньшей мере одна газообразная среда из группы газообразных сред, содержащей: гелий, водород, аммиак, пары воды, неон, ацетилен, окись углерода, азот и этилен. Другими словами, в данном варианте реализации настоящего изобретения текучая среда, которой может быть заполнена по меньшей мере одна или каждая из емкостей 300, может представлять собой смесь из двух и более газообразных сред, выбранных из группы газообразных сред, содержащей: гелий, водород, аммиак, пары воды, неон, ацетилен, окись углерода, азот и этилен, что позволяет предварительно подобрать характеристики потока текучей среды, попускаемого из сопла 200, сообщающегося с указанной емкостью 300, в зависимости от поставленной задачи и/или среды эксплуатации летательного аппарата 500-1, а также позволяет в некоторой степени изменять или регулировать несущую способность летательного аппарата 500-1.
В другом варианте реализации настоящего изобретения корпус (т.е. основная часть или тело) по меньшей мере одной или каждой из емкостей 300 может быть выполнен эластичным, что позволяет ему растягиваться при его заполнении текучей средой под давлением с обеспечением увеличения его размера от минимального, который он имеет в своем первоначальном состоянии (т.е. в состоянии до начала его заполнения необходимой текучей средой), до целевого, который он имеет в конечном (целевом) состоянии (т.е. в состоянии по завершению процесса его заполнения необходимой текучей средой), при этом целевой размер корпуса емкости 300, достигаемый после его заполнения текучей средой, может соответствовать максимально допустимому размеру корпуса емкости 300, который подходит по габаритным размерам летательного аппарата 500-1, технике безопасности и/или предельным нагрузкам на растяжение, которые способен выдержать материал, из которого изготовлен указанный корпус емкости 300.
В ином варианте реализации настоящего изобретения по меньшей мере одна или каждая из емкостей 300, входящих в состав летательного аппарата 500-1, может быть выполнена с возможностью ее заполнения смесью по меньшей мере из двух газообразных сред разной плотности (например, смесью из неона и гелия).
Таким образом, сопло 200 и емкость 300, функционально и конструктивно соединенные друг с другом и установленные на корпусе 100 с одной и той же его стороны, вместе образуют независимый движитель летательного аппарата 500-1 с указанной стороны корпуса 100, обеспечивающий возможность перемещения летательного аппарата 500-1 в воздухе или возможность полета летательного аппарата 500-1 с заданной скоростью при управляемом выпуске потока текучей среды из указанного сопла 200, контролируемом модулем 110 управления. Другими словами, корпус 100 в летательном аппарате 500-1, показанном на фиг. 1, снабжен двумя такими воздушными движителями, каждый из которых образован из сообщающихся между собой одной из емкостей 300 и одного из сопел 200.
Следует отметить, что сопла 200 закреплены на противоположных сторонах корпуса 100 посредством поворотных механизмов (не показаны). Другими словами, каждое из сопел 200 закреплено на корпусе 100 посредством отдельного поворотного механизма. Модуль 110 управления дополнительно соединен с каждым из поворотных механизмов (не показаны) с обеспечением возможности управления работой указанного поворотного механизма для совместного поворотного перемещения или поворота конструктивно соединенных между собой сопла 200 и емкости 300, соответствующих указанному поворотному механизму, или движителя, образованного из конструктивно соединенных между собой сопла 200 и емкости 300, соответствующих указанному поворотному механизму, по меньшей мере по одной из трех координатных осей (например, по одной координатной оси, сразу по двум координатным осям или сразу по всем трем координатным осям). Таким образом, модуль 110 управления может выдавать управляющие команды или инструкции на каждый из драйверов управления для управления работой поворотных механизмов, закрепленных на корпусе 100, при этом указанные драйверы управления могут быть реализованы каждый, например, в виде микроконтроллера, контроллера или любой иной подходящей управляющей микросхемы, известной в уровне техники. Следует отметить, что модуль 110 управления может выдавать управляющие команды или инструкции только на один из поворотных механизмов (не показаны) для управления его работой с обеспечением возможности поворота конструктивно соединенных между собой сопла 200 и емкости 300, установленных на указанном поворотном механизме, или движителя, образованного из конструктивно соединенных между собой сопла 200 и емкости 300, установленных на указанном поворотном механизме, на заданный угол поворота одновременно по одной или более координатным осям в зависимости определенных пространственных координат, принятых модулем 110 управления от навигационного модуля 130. Следует также отметить, что модуль 110 управления может выдавать отдельные управляющие команды или инструкции одновременно на оба поворотных механизма (не показаны) для управления их работой с обеспечением (i) возможности поворота конструктивно соединенных между собой сопла 200 и емкости 300, установленных на одном из поворотных механизмов с одной стороны корпуса 100, или поворота движителя, образованного из конструктивно соединенных между собой сопла 200 и емкости 300, установленных на одном из поворотных механизмов с одной стороны корпуса 100, на заданный угол поворота одновременно по одной или более координатным осям в зависимости от определенных пространственных координат, принятых модулем 110 управления от навигационного модуля 130, и (ii) возможности поворота конструктивно соединенных между собой сопла 200 и емкости 300, установленных на другом поворотном механизме из указанных поворотных механизмов с другой стороны корпуса 100, или поворота движителя, образованного из конструктивно соединенных между собой сопла 200 и емкости 300, установленных на другом поворотном механизме из указанных поворотных механизмов с другой стороны корпуса 100, на заданный угол поворота одновременно по одной или более координатным осям в зависимости от указанных определенных пространственных координат, при этом указанные углы поворота могут совпадать друг с другом или отличаться друг от друга.
Согласно одному из вариантов реализации настоящего изобретения, корпус 100 в летательном аппарате 500-1 может быть снабжен только одной емкостью 300, установленной с внешней стороны корпуса 100 или внутри корпуса 100 и выполненной с возможностью ее заполнения текучей средой под давлением и снабженной одним или более выпускными отверстиями (не показаны) для выпуска текучей среды, и двумя соплами 200, сообщающимися каждое посредством текучей среды с указанной емкостью 300, при этом сообщение между соплами 200 и указанными выпускными отверстиями емкости 300 может быть реализовано с использованием, например, одного или более распределительных устройств (не показаны), работой которых может управлять модуль 110 управления, и соединительных каналов (не показаны), выполненных каждый в виде, например, трубки, трубопровода, магистрали или любого иного подходящего технического средства, выполненного с возможностью прохождения или пропускания через него текучей среды. Таким образом, в данном варианте реализации настоящего изобретения емкость 300 может быть разъемно соединена с корпусом 100 с его внутренней стороны или его внешней стороны. В одной из разновидностей данного варианта реализации настоящего изобретения емкость 300 может быть соединена с одним соплом 200 с использованием одной или более соединительных трубок для текучей среды (например, одной, двух, трех и более соединительных трубок) и может быть соединена с другим соплом 200 с использованием одной или более других соединительных трубок для текучей среды (например, одной, двух, трех и более соединительных трубок).
Согласно другому варианту реализации настоящего изобретения, корпус 100 в летательном аппарате 500-1 может быть снабжен по меньшей мере одной емкостью 300 (например, одной, двумя, тремя и более емкостями 300), установленной внутри или во внутреннем пространстве корпуса 100 и сообщающейся с соплами 200 с использованием соединительных трубок для текучей среды и/или распределительного устройства для распределения текучей среды по соединительным трубкам. Таким образом, в данном варианте реализации настоящего изобретения каждая из емкостей, которыми может быть снабжен корпус 100, может сообщаться посредством текучей среды с каждым из сопел 200, при этом сопла 200 могут быть конструктивно соединены (разъемно или с образованием единого целого) с емкостью 300 или могут быть установлены снаружи корпуса 100 отдельно от емкости 300.
Согласно еще одному варианту реализации настоящего изобретения, корпус 100 в летательном аппарате 500-1 может быть снабжен двумя или более емкостями 300, установленными внутри или снаружи корпуса 100, при этом по меньшей мере одна из указанных емкостей 300 может сообщаться посредством текучей среды с одним из сопел 200, а по меньшей мере одна другая емкость из указанных емкостей 300 может сообщаться посредством текучей среды с другим соплом из указанных сопел 200.
Согласно иному варианту реализации настоящего изобретения, по меньшей мере одна из емкостей 300 и по меньшей мере одно из сопел 200, соответствующее указанной по меньшей мере одной емкости 300, может быть выполнены за одно целое друг с другом, при этом указанная по меньшей мере одна емкость 300 может быть выполнена с возможностью ее повторного заполнения текучей средой под давлением.
Согласно некоторому варианту реализации настоящего изобретения, по меньшей мере одно или каждое из сопел 200 может быть съемно установлено на поворотном механизме, т.е. может быть откреплено или отсоединено от своего поворотного механизма для технического обслуживания или замены указанного сопла 200.
Согласно некоторому иному варианту реализации настоящего изобретения по меньшей мере одно или каждое из сопел 200 по меньшей мере одна или каждая из емкостей 300 может сообщаться посредством текучей среды с двумя или более соплами 200 для выпуска текучей среды, которые снабжены каждое управляемым клапаном, а модуль 110 управления может быть дополнительно соединен с управляемыми клапанами сопел 200 с обеспечением возможности управления их работой или возможности изменения их состояния для регулирования выпуска текучей среды из емкостей 300. В одной из разновидностей данного варианта реализации настоящего изобретения два или более сопел 200 могут быть установлены на емкости 300 на заданном расстоянии друг от друга и могут иметь предварительно заданную пространственную ориентацию по отношению к указанной емкости 300. В другой разновидности данного варианта реализации настоящего изобретения два или более сопел 200 могут быть установлены на емкости 300 на заданном расстоянии друг от друга и могут быть выполнены с возможностью поворота вокруг своей оси под управлением модуля 110 управления с изменением своей пространственной ориентации или своего пространственного положения по отношению к указанной емкости 300. Еще в одной разновидности данного варианта реализации настоящего изобретения два или более сопел 200 могут быть установлены на корпусе 100 на заданном расстоянии друг от друга или могут быть установлены на корпусе 100 с возможностью поворота с изменением своей пространственной ориентации или своего пространственного положения по отношению к корпусу 100. В иной разновидности данного варианта реализации настоящего изобретения два или более сопел 200 могут быть установлены на противоположных сторонах емкости 300 или противоположных сторонах корпуса 100. В некоторой разновидности данного варианта реализации настоящего изобретения два или более сопел 200 могут быть установлены с разных сторон емкости 300 или разных сторон корпуса 100.
Модуль 120 связи в летательном аппарате 500-1, показанном на фиг. 1, выполнен с возможностью установления связи по сети связи (не показана) с одним или более внешних управляющих устройств (например, с внешним управляющим сервером, пультом управления оператора, пользовательским управляющим устройством в виде компьютера, ноутбука, планшета, смартфона и т.п.) с обеспечением возможности взаимного обмена данными. В частности, модуль 120 может обеспечивать возможность приема данных о маршруте полета летательного аппарата 500-1, данных о координатах пункта назначения летательного аппарата 500-1, управляющих команд, навигационных команд и/или т.п. от внешнего управляющего устройства с обеспечением возможности их выдачи по шине данных на модуль 110 управления. Следует отметить, что в качестве сети связи (не показана) может быть использована любая подходящая линия беспроводной связи, известная в уровне техники, например, линия связи на основе технологии беспроводной связи «WiFi», линия связи на основе технологии беспроводной связи «2G», «3G», «4G» или «5G», сеть связи на основе технологии «LTE» или т.п.
Таким образом, для обмена данными с внешними источниками данных и/или внешними управляющими устройствами модуль 120 связи должен быть реализован в качестве сетевого адаптера в виде WiFi-адаптера, 2G/3G/4G/5G-адаптера, LTE-адаптера или иного адаптера беспроводной связи в зависимости от типа линии беспроводной связи, использованной для обеспечения связи между модулем 120 связи и внешними источниками данных и/или внешними управляющими устройствами.
Кроме того, модуль 120 связи в летательном аппарате 500-1 может быть выполнен с возможностью установления связи по сети связи с внешними источниками данных (например, с удаленных хранилищем данным, сервером данных, веб-сайтом и т.п.) для приема от них данных о маршруте полета летательного аппарата 500-1, данных о координатах пункта назначения летательного аппарата 500-1 и/или иных данных, необходимых для функционирования летательного аппарата 500-1.
Кроме того, модуль 120 связи в летательном аппарате 500-1 может быть использован для направления различных запросов (в том числе системных запросов) или команд летательного аппарата 500-1 на внешние источники данных (не показаны) и/или внешние управляющие устройства (не показаны), а также для приема от таких внешних источников данных и/или внешних управляющих устройств различных запросов, команд, системных ответов/подтверждений и/или запрошенных данных.
Модуль 120 связи в летательном аппарате 500-1 также может представлять собой известное устройство связи, такое как передатчик, приемник, приемопередатчик, модем и/или сетевая интерфейсная карта для беспроводного обмена данными с внешними управляющими устройствами и/или внешними запоминающими устройствами любого типа посредством беспроводной сети связи, например с помощью сетевого соединения стандарта «Ethernet», цифровой абонентской линия связи (DSL), сети сотовой связи и/или т.п.
Модуль 110 управления, соединенный посредством шины связи с модулем 110 связи и навигационным модулем 130 с обеспечением возможности управления их работой и возможностью обмена с ними данными, дополнительно выполнен с возможностью управления работой описанных в данном документе управляемых клапанов, поворотных механизмов, распределительных устройств, сопел, а также иных электронных компонентов и/или электромеханических компонентов, которые могут входить в состав летательного аппарата 500-1 в различных вариантах реализации настоящего изобретения, описанных в данном документе или являющихся очевидными для специалиста модификациями указанных описанных вариантов реализации настоящего изобретения, при этом каждый из указанных электронных компонентов и/или электромеханических компонентов летательного аппарата 500-1 и может быть снабжен своим драйвером управления, принимающим управляющие инструкции или команды от модуля 110 управления с обеспечением возможности запуска (приведения в действие) такого компонента летательного аппарата 500-1 и/или возможности задания или изменения режима работы такого компонента летательного аппарата 500-1.
Кроме того, модуль 110 управления может иметь доступ, посредством шины связи, по меньшей мере к одной локальной базе данных, хранящейся в памяти летательного аппарата 500-1, или по меньшей мере одной внешней базе данных, хранящейся на внешнем источнике данных (например, внешнем накопителе данных, веб-сервер, сервере данных и/или т.п.), при этом в такой базе данных могут быть предварительно сохранены данные о маршруте полета летательного аппарата 500-1, данные о координатах пункта назначения летательного аппарата 500-1 и/или иные рабочие данные, используемые в процессе функционирования летательного аппарата 500-1 и/или используемые для выполнения компонентами летательного аппарата 500-1 своих функциональных назначений, описанных в данном документе.
Модуль 110 управления в летательном аппарате 500-1 может содержать процессор, выполненный с возможностью исполнения машиночитаемых управляющих команд в автоматическом режиме или по меньшей мере частично на основе внешних управляющих инструкций, принимаемых от оператора (например, операторского сервера), пользовательского устройства или любого иного внешнего источника управления, соединенного по сети связи (не показана) с модулем ПО управления с возможностью выдачи на него управляющих инструкций (в том числе навигационных инструкций) или управляющих команд.
В одном из вариантов реализации настоящего изобретения для обмена данными (в том числе рабочими данными и/или системными данными) в режиме реального времени между модулем 110 управления, внешними источниками данных и/или внешними управляющими устройствами могут быть использованы две и более сетей беспроводной связи (не показаны), выполненных каждая аналогично вышеописанной сети связи (не показана).
В другом варианте реализации настоящего изобретения протоколы передачи данных и/или технические средства, используемые для обмена данными (в том числе рабочими данными и/или системными данными) между модулем 110 управления, внешними источниками данных и/или внешними управляющими устройствами, могут отличаться друг от друга или могут совпадать друг с другом, при этом для обмена рабочими данными и/или системными данными могут быть одновременно использованы один или более протоколов связи и соответствующих технических средств связи.
Еще в одном варианте реализации настоящего изобретения для обмена данными (в том числе рабочими данными и/или системными данными) в режиме реального времени между модулем 110 управления, внешними источниками данных и/или внешними управляющими устройствами могут быть использованы одно или более средств связи из группы средств связи, содержащей: радиоантенны KB диапазона, радиоантенны УКВ диапазона, радиоантенны СВЧ диапазона, модуль оптической связи, модуль спутниковой связи полудуплекс/симплекс, модуль сотовой связи 2G/3G/4G/LTE/5G, модуль сетевой беспроводной, модуль проводной связи и/или т.п.
Модуль 110 управления, входящий в состав летательного аппарата 500-1, показанного на фиг. 1, может представлять собой совокупность аппаратных и программных средств, обеспечивающих выполнение заданных функциональных возможностей, описанных в данном документе в отношении модуля 110 управления. В частности, модуль 110 управления может представлять собой процессорное или вычислительное устройство, выполненное с возможностью получения доступа к управляющим программным инструкциям или возможностью приема управляющих программных инструкций с обеспечением возможности их исполнения для осуществления функциональных возможностей, описанных в данном документе в отношении модуля 110 управления.
В некоторых вариантах реализации настоящего изобретения модуль 120 связи, входящий в состав летательного аппарата 500-1, показанного на фиг. 1, может представлять собой приемник или приемопередатчик, выполненный с возможностью регистрации управляющего сигнала в виде радиосигнала, звукового сигнала, светового сигнала или сигнала любого иного подходящего типа, известного в уровне техники, от оператора, пользовательского устройства или любого иного подходящего внешнего источника управления, а модуль 110 управления, также входящий в состав летательного аппарата 500-1, показанного на фиг. 1, может представлять собой любой подходящий преобразователь сигналов, соединенный с указанным приемопередатчиком с обеспечением возможности получения от него указанного управляющего сигнала и выполненный с возможностью преобразования указанного полученного управляющего сигнала в электрический сигнал с обеспечением возможности его выдачи на функциональные компоненты летательного аппарата 500-1, описанные в данном документе и обеспечивающие в летательном аппарате 500-1 возможность регулируемого выпуска текучей среды по меньшей мере из одной из емкостей 300 для управления перемещением летательного аппарата 500-1 по воздуху или управления полетом летательного аппарата 500-1.
Согласно одному из вариантов реализации настоящего изобретения, по меньшей мере одна или каждая из емкостей 300 может быть дополнительно снабжена датчиком давления (не показан), выполненным с возможностью регистрации давления текучей среды в указанной емкости 300, при этом модуль 110 управления может быть дополнительно соединен с датчиками давления емкостей 300 с обеспечением возможности регулирования выпуска текучей среды по меньшей мере из одной емкости из указанных емкостей 300 в зависимости от показаний датчиков давления. В одной из разновидностей данного варианта реализации настоящего изобретения показания датчиков давления, установленных в емкостях 300, и/или пространственные координаты, определяемые навигационным модулем 120 в реальном времени, могут быть совместно использованы модулем 110 управления для регулирования выпуска текучей среды по меньшей мере из одной емкости из указанных емкостей 300 и, следовательно, для управления перемещением по воздуху или полетом летательного аппарата 500-1. Таким образом, в данной разновидности настоящего изобретения то, какие емкости 300 будут задействованы для выпуска из них текучей среды, и значения расхода текучей среды, выпускаемой из указанных задействованных емкостей 300, будут зависеть от текущих пространственных координат летательного аппарата 500-1 и/или показаний датчиков давления текучей среды в емкостях 300.
Согласно другому варианту реализации настоящего изобретения, летательный аппарат 500-1 может дополнительно содержать модуль обнаружения препятствий (не показан), который может быть установлен с внешней стороны корпуса 100 или внутри корпуса 100, при этом модуль обнаружения препятствий (не показан) может быть выполнен с возможностью обнаружения одного или более препятствий в реальном времени при перемещении летательного аппарата 500-1 по воздуху или в процессе полете летательного аппарата 500-1 в соответствии с заданным маршрутом полета до целевого пункта (места) назначения, а модуль 110 управления может быть дополнительно соединен с модулем обнаружения препятствий с обеспечением возможности приема в реальном времени данных об обнаруженных препятствиях и возможности регулирования выпуска текучей среды по меньшей мере из одной или каждой из емкостей 300 в зависимости от указанных обнаруженных препятствий. Следует отметить, что модуль обнаружения препятствий (не показан) может быть реализован, например, в виде лидара, УЗ-датчика, ИК-сенсора, радара, видеосенсора и т.п. В одной из разновидностей данного варианта реализации данные об обнаруженных препятствиях, получаемые в реальном времени с помощью модуля обнаружения препятствий, показания датчиков давления, установленных в емкостях 300, и/или пространственные координаты, определяемые в реальном времени с помощью навигационного модуля 120, могут быть совместно использованы модулем 110 управления для регулирования выпуска текучей среды по меньшей мере из одной или каждой емкости из указанных емкостей 300 и, следовательно, для управления перемещением по воздуху или полетом летательного аппарата 500-1. Таким образом, в данной разновидности настоящего изобретения то, какие емкости 300 будут задействованы для выпуска из них текучей среды, и значения расхода текучей среды, выпускаемой из указанных задействованных емкостей 300, будут зависеть от данных об обнаруженных препятствиях на пути следования летательного аппарата 500-1, текущих пространственных координат летательного аппарата 500-1 и/или показаний датчиков давления текучей среды в емкостях 300.
Согласно другому варианту реализации настоящего изобретения, летательный аппарат 500-1 может дополнительно содержать модуль регистрации параметров полета (не показан), выполненный с возможностью получения одного или более параметров полета в реальном времени, при этом модуль 110 управления может быть дополнительно соединен с модулем регистрации параметров полета (не показан) с обеспечением возможности приема зарегистрированных параметров полета и возможности регулирования выпуска текучей среды по меньшей мере из одной или каждой из емкостей 300 в зависимости от указанных принятых параметров полета. Следует отметить, что модуль регистрации параметров полета (не показан) может содержать различные датчики для измерения параметров полета летательного аппарата 500-1, известные в уровне техники, например барометрические высотометры, индикаторы воздушной скорости и числа Маха, вариометры, приемники воздушного давления, централизованные системы воздушных сигналов, манометры, тахометры, термометры, системы управления движителями, авиагоризонты, курсовые приборы и автоматы углов атаки и сигнализации перегрузок. В одной из разновидностей данного варианта реализации параметры полета летательного аппарата 500-1, регистрируемые в реальном времени с помощью модуля регистрации параметров полета (не показан), данные об обнаруженных препятствиях, получаемые в реальном времени с помощью модуля обнаружения препятствий (не показан), показания датчиков давления, установленных в емкостях 300, и/или пространственные координаты, определяемые в реальном времени с помощью навигационного модуля 120, могут быть совместно использованы модулем 110 управления для регулирования выпуска текучей среды по меньшей мере из одной или каждой емкости из указанных емкостей 300 и, следовательно, для управления перемещением по воздуху или полетом летательного аппарата 500-1. Таким образом, в данной разновидности настоящего изобретения то, какие емкости 300 будут задействованы для выпуска из них текучей среды, и значения расхода текучей среды, выпускаемой из указанных задействованных емкостей 300, будут зависеть от данных о параметрах полета летательного аппарата 500-1, данных об обнаруженных препятствиях на пути следования летательного аппарата 500-1, текущих пространственных координат летательного аппарата 500-1 и/или показаний датчиков давления текучей среды в емкостях 300.
Согласно иному варианту реализации настоящего изобретения, корпус 100 в летательном аппарате 500-1 может быть дополнительно снабжен одним или более выпускными патрубками, сообщающимися каждый посредством текучей среды по меньшей мере с одной из емкостей 300 и снабженных каждый одним или более управляемыми клапанами (не показаны), а модуль 110 управления может быть дополнительно соединен с управляемыми клапанами выпускных патрубков (не показаны) с обеспечением возможности регулирования выпуска текучей среды из указанных выпускных патрубков при перемещении летательного аппарата 500-1 по воздуху или полете летательного аппарата 500-1.
В одной из разновидностей данного варианта реализации настоящего изобретения по меньшей мере один из выпускных патрубков закреплен на корпусе посредством поворотного механизма, а модуль управления дополнительно соединен с поворотным механизмом с обеспечением возможности управления его работой для поворотного перемещения указанного по меньшей мере одного выпускного патрубка.
Согласно некоторому варианту реализации настоящего изобретения, корпус 100 в летательном аппарате 500-1 может быть снабжен одним или более управляемыми источниками света (не показаны), выполненными с обеспечением возможности изменения длины волны излучаемого света, а модуль 110 управления может быть дополнительно соединен с указанными источниками света (не показаны) с обеспечением возможности управления их работой для изменения длины волны излучения света по меньшей мере одного или каждого из указанных источников света (не показаны).
Согласно некоторому иному варианту реализации настоящего изобретения, корпус 100 в летательном аппарате 500-1 может быть снабжен одним или более дисплеями (не показаны), а модуль 110 управления может быть дополнительно соединен с указанными дисплеями (не показаны) с обеспечением возможности управления их работой для отображения заданного изображения по меньшей мере на одном или каждом из указанных дисплеев (не показаны).
Согласно некоторому другому варианту реализации настоящего изобретения, корпус 100 в летательном аппарате 500-1 может быть снабжен одной или более камерами (не показаны), установленными на корпусе 100 с его внешней стороны, а модуль 110 управления может быть дополнительно соединен с указанными камерами (не показаны) с обеспечением возможности управления их работой для захвата изображения с использованием по меньшей мере одной или каждой из указанных камер (не показаны).
На фиг. 2 показан еще один вариант реализации летательного аппарата согласно первому аспекту настоящего изобретения, который по сути является одной из разновидностей варианта реализации летательного аппарата 500-1, показанного на фиг. 1, при этом модуль связи, навигационный модуль и модуль управления в летательном аппарате, показанном на фиг. 2, выполнены конструктивно и функционально аналогично соответственно вышеописанному модулю 120 связи, вышеописанному навигационному модулю 130 и вышеописанному модулю 110 управления.
Как показано на фиг. 2, корпус 100 в летательном аппарате 500-1 снабжен со своей наружной стороны четырьмя соплами, каждое из которых выполнено аналогично любому из вышеописанных сопел 200, при этом сопла 200 имеют фиксированную пространственную ориентацию или фиксированное пространственное положение по отношению к корпусу 100 и, следовательно, позволяют выпускать каждое поток текучей среды в заданном направлении. В частности, как показано на фиг. 2, в летательном аппарате 500-1 три сопла 200 расположены с нижней стороны корпуса 100 с обеспечением возможности создания тягового усилия по направлению вверх, а еще одно сопло 200 расположено с верхней стороны корпуса 100 напротив центрального нижнего сопла 200 с обеспечением возможности создания тягового усилия по направлению вниз, способного корректировать (уменьшать) скорость перемещения летательного аппарата 500-1 по направлению вверх при одновременной работе по меньшей мере одного из нижних сопел 200 и центрального верхнего сопла 200 или ускорять (в дополнение к силе тяжести) перемещение летательного аппарата 500-1 по направлению вниз при выключенных нижних соплах 200.
В одном из вариантов реализации сопла 200 могут быть установлены на корпусе 100 с помощью соответствующих поворотных механизмов (не показаны), описанных выше в данном документе.
В другом варианте реализации настоящего изобретения корпус 100 в летательном аппарате 500-1 может быть снабжен одним или более соплами (например, одним, двумя, тремя, четырьмя, пятью, шестью, семью, восемью, девятью, десятью или более соплами 200, которые могут быть выполнены с одной и то же стороны корпус 100 или с разных сторон корпуса 100, при этом по меньшей мере часть из указанных сопел 200 могут выдавать потоки текучей среды под управлением модуля 110 управления, проходящие под углом друг к другу (например, острым, тупым, прямым), или выдавать потоки текучей среды под управлением модуля 110 управления во взаимно противоположные стороны.
На фиг. 2 слева и справа показаны соответственно незаправленное состояние летательного аппарата 500-1, в котором в корпусе 100 отсутствует емкость 300 с текучей средой, и заправленное состояние летательного аппарата 500-1, в котором в корпусе 100 установлена емкость 300 с текучей средой. Таким образом, емкость 300 с текучей средой может быть съемно установлена внутри корпуса 100 для обеспечения возможности эксплуатации летательного аппарата, показанного на фиг. 2, путем подачи текучей среды из емкости 300 по меньшей мере в одно или каждое из сопел 200 под управлением модуля управления летательного аппарата 500-1. При необходимости заправки емкости 300 она может быть демонтирована и извлечена из корпуса 100 для ее подключения к заправочной станции или любому подходящему заправочному устройству, известному в уровне техники, для наполнения этой емкости 300 необходимой текучей средой под давлением, при этой в дальнейшем заправленная емкость 300 может быть снова установлена в корпус 100.
Как показано на фиг. 2, при установке емкости 300 с текучей средой в корпус 100 центральное нижнее сопло 200 оказывается конструктивно соединенным с указанной емкостью 300 с обеспечением возможности их сообщения посредством текучей среды при открытии одного или более управляемых клапанов, работой которых управляет модуль управления летательного аппарата 500-1, при этом левое и правое нижние сопла 200, между которыми находится центральное нижнее сопло 200, соединены каждое посредством своих соединительных каналов в виде трубки с распределительным устройством 140, которое может быть соединено с емкостью 300 при ее установке в корпус 100 с обеспечением их сообщения посредством текучей среды и работой которого управляет модуль управления летательного аппарата 500-1, что обеспечивает возможность сообщения по меньшей мере одного или каждого из левого и правого нижнего сопел 200 с емкостью 300 посредством распределительного устройства 140 при открытии одного или более управляемых клапанов, работой которых управляет модуль управления летательного аппарата 500-1. Аналогичным образом, как показано на фиг. 2, центральное верхнее сопло 200, противолежащее центральному нижнему соплу 200, соединено посредством своего соединительного канала в виде трубки с распределительным устройством 140, которое может быть соединено с емкостью 300 при ее установке в корпус 100 с обеспечением их сообщения посредством текучей среды и работой которого управляет модуль управления летательного аппарата 500-1, что обеспечивает возможность сообщения центрального верхнего сопла 200 с емкостью 300 посредством распределительного устройства 140 при открытии одного или более управляемых клапанов, работой которых управляет модуль управления летательного аппарата 500-1. Таким образом, в летательном аппарате 500-1, показанном на фиг. 2, модуль управления летательного аппарата 500-1, управляющий работой или состоянием распределительного устройства 140 и управляемых клапанов летательного аппарата 500-1 (например, управляемого клапана емкости 300, управляемых клапанов сопел 200 и т.п.), обеспечивает возможность подачи текучей среды из емкости 300 по меньшей мере в одно или каждое из сопел 200 для управления перемещением летательного аппарата 500-1 по воздуху или управления полетом летательного аппарата 500-1.
В одной из разновидностей данного варианта реализации летательного аппарата 500-1, показанного на фиг. 2, емкость 300, установленная в корпусе 100, может быть соединена с каждым из сопел 200 с использованием одной или более соединительных трубок для текучей среды (например, одной, двух, трех и более соединительных трубок) с использованием вышеописанного распределительного устройства 140, управляемого модулем управления летательного аппарата 500-1 и соединенного с указанными соединительными трубками.
Кроме того, в состав летательного аппарата 500-1, показанного на фиг. 1-2, также входит источник питания (не показан) в виде перезаряжаемой аккумуляторной батареи или неперезаряжаемого элемента питания, известного в уровне техники, при этом источник питания (не показан) по сути используется для подачи питания на модуль управления летательного аппарата 500-1, навигационный модуль летательного аппарата 500-1, любые иные управляемые и микроэлектронные компоненты, описанные в данном документе в составе летательного аппарата 500-1, и/или иные функциональные компоненты летательного аппарата 500-1, наличие которых в составе летательного аппарата 500-1 является очевидным для специалиста в данной области техники и которые используются для реализации функционального назначения летательного аппарата 500-1. В некоторых вариантах реализации настоящего изобретения источник питания в летательном аппарате 500-1, показанном на фиг. 1-2, может представлять собой солнечную батарею или любой иной подходящий источник энергии, известный в уровне техники. В иных вариантах реализации настоящего изобретения летательный аппарат 500-1, показанный на фиг. 1-2, может быть снабжен двумя или более электрически связанными между собой источниками питания, каждый из которых может содержать одну или более аккумуляторных батарей.
В некоторых вариантах реализации настоящего изобретения летательный аппарат 500-1, показанный на фиг. 1-2, может быть дополнительно снабжен одним или более крыльями (не показаны), скрепленными с корпусом 100 или выполненные с ним за одно целое, для улучшения управляемости летательным аппаратом 500-1 при его перемещении в воздухе или во время его полета.
Второй вариант реализации летательного аппарата
На фиг. 3 показан один из вариантов реализации летательного аппарата 500-2 согласно второму аспекту настоящего изобретения, который по сути является одним из альтернативных вариантов реализации вышеописанного летательного аппарата 500-1, показанного на фиг. 1, или нижеописанного летательного аппарата 500-3, показанного на фиг. 4.
Как показано на фиг. 3, летательный аппарат 500-2 содержит надувной корпус 100, выполненный с возможностью его наполнения или заполнения текучей средой под давлением, при этом слева на фиг. 3 надувной корпус 100 находится в первоначальном (ненадутом) состоянии, в котором в надувном корпусе 100 отсутствует или по существу отсутствует текучая среда (т.е. надувной корпус 100 может находиться в данном состоянии до начала процесса первоначального или повторного заполнения надувного корпуса 100 текучей средой или по завершению процесса выпуска текучей среды из надувного корпуса 100), а справа на фиг. 3 надувной корпус 100 находится в целевом (надутом) состоянии, в котором надувной корпус 100 полностью или частично заполнен текучей средой (т.е. надувной корпус 100 может находиться в данном состоянии после завершения процесса его полного или частичного заполнения текучей средой). Следует отметить, что при выпуске текучей среды из надутого корпуса 100 он со временем переходит из надутого состояния (см. фиг. 3 справа) в ненадутое состояние (см. фиг. 3 слева). Для обеспечения возможности надувания надувного корпуса 100 в летательном аппарате 500-2 при его заполнении текучей средой надувной корпус 100 выполнен из эластичного материала, что позволяет надувному корпусу 100 растягиваться при его заполнении текучей средой под давлением с обеспечением увеличения его размера от минимального, который он имеет или принимает в своем первоначальном (ненадутом) состоянии, до целевого размера, который он имеет или принимает в целевом (надутом) состоянии, при этом целевой размер надувного корпуса 100, достигаемый после его полного или частичного заполнения текучей средой под давлением, может соответствовать максимально допустимому размеру корпуса 100, который подходит по габаритным размерам летательного аппарата 500-2, технике безопасности и/или предельным нагрузкам на растяжение, которые способен выдержать эластичный материал, из которого изготовлен указанный надувной корпус 100.
В корпусе 100 в летательном аппарате 500-2, показанном на фиг. 3, размещены модуль связи (не показан), выполненный с возможностью установления связи с внешними источниками данных или внешними управляющими устройствами с обеспечением возможности взаимного обмена данными, навигационный модуль (не показан), выполненный с возможностью определения пространственного местоположения или пространственных координат летательного аппарата 500-2 в реальном времени, и модуль управления (не показан), соединенный с возможностью обмена данными с модулем связи летательного аппарата 500-2 и навигационным модулем летательного аппарата 500-2. Следует отметить, что модуль связи летательного аппарата 500-2 и навигационный модуль летательного аппарата 500-2 выполнены аналогично соответственно вышеописанному модулю 120 связи и вышеописанному навигационному модулю 130. Следует также отметить, что модуль управления (не показан), входящий в состав летательного аппарата 500-2, и модуль 110 управления, входящий в состав летательного аппарата 500-1, имеют по существу одни и те же особенности исполнения и схожие функциональные особенности. Следует также отметить, что там, где это применимо, вышеописанные варианты реализации летательного аппарата 500-1 и их разновидности следует считать относящимися и к летательному аппарату 500-2 согласно второму аспекту настоящего изобретения.
В частности, модуль управления летательного аппарата 500-2 соединен с навигационным модулем летательного аппарата 500-2 с возможностью приема от него определенных пространственных координат и выполнен с обеспечением возможности регулируемого выпуска текучей среды из надувного корпуса 100 для управления перемещением летательного аппарата 500-2 по воздуху или управления полетом летательного аппарата 500-2.
Как показано на фиг. 3, надувной корпус 100 в летательном аппарате 500-2 снабжен со своей внешней стороны тремя соплами 200, каждое из которых съемно установлено или разъемно закреплено в фиксированном положении по отношению к надувному корпусу 100 и которые сообщаются посредством текучей среды с внутренним пространством надувного корпуса 100, который при эксплуатации или использовании летательного аппарата 500-2 оказывается наполненным или заполненным текучей средой под давлением, при этом каждое из трех сопел 200, которыми снабжен надувной корпус 100 в летательном аппарате 500-2, может быть выполнено аналогично любому из сопел 200, описанных выше в данном документе в отношении летательного аппарата 500-1.
Для обеспечения возможности сообщения посредством текучей среды внутреннего пространства надувного корпуса 100, входящего в состав летательного аппарата 500-2, с соплами 200 тело этого надувного корпуса 100 снабжено тремя выпускными отверстиями для выпуска текучей среды, которые снабжены каждое управляемым клапаном, который может быть реализован аналогично управляемому клапану, описанному выше в данном документе в отношении летательного аппарата 500-1, при этом модуль управления летательного аппарата 500-2 аналогично летательному аппарату 500-1 соединен со всеми управляемыми клапанами надувного корпуса 100 с обеспечением возможности управления их работой или возможности изменения их состояния (в частности, возможны следующие состояния управляемых клапанов: полностью открытый, полностью закрытый и частично открытый) для регулирования выпуска текучей среды из надувного корпуса 100.
В некоторых вариантах реализации настоящего изобретения надувной корпус 100 в летательном аппарате 500-2 может быть снабжен двумя или более соплами 200 (например, двумя, тремя, четырьмя, пятью, шестью, семью, восемью, девятью, десятью и более), которые могут быть съемно установлены с внешней стороны надувного корпуса 100 или которые могут соединены с надувным корпусом 100 с его внешней стороны с образованием единого целого.
В иных вариантах реализации настоящего изобретения сопла 200, которыми снабжен надувной корпус 100 в летательном аппарате 500-2, могут быть установлены на надувном корпусе 100 посредством поворотных механизмов (не показаны), выполненных аналогично поворотным механизмам, описанным выше в отношении летательного аппарата 500-1, и находящихся под управлением модуля управления летательного аппарата 500-2, что позволяет регулировать или изменять пространственную ориентацию сопел 200 при эксплуатации летательного аппарата 500-2 (в частности, до полета или во время полета) и, следовательно, регулировать или изменять направление потоков текучей среды, выпускаемых из указанных сопел 200, управляя тем самым перемещением летательного аппарата 500-2 по воздуху или полетом летательного аппарата 500-2.
В некоторых иных вариантах реализации настоящего изобретения надувной корпус 100 в летательном аппарате 500-2 может быть снабжен только одним соплом 200, сообщающимся посредством текучей среды с внутренним пространством надувного корпуса 100, при этом указанное сопло 200 может иметь два и более каналов для текучей среды, выполненных в теле этого сопла 200 и сообщающиеся посредством соответствующих выпускных отверстий сопла 200 с внешней средой, выполненных с разных сторон или в разных местах тела сопла 200, что позволяет по существу одновременно или последовательно выпускать текучую среду, подаваемую в сопло 200 из внутреннего пространства надувного корпуса 100 с помощью одной или более трубок для текучей среды, по меньшей мере из одного или каждого из указанных каналов сопла 200, управляя тем самым перемещением летательного аппарата 500-2 по воздуху или полетом летательного аппарата 500-2.
В других вариантах реализации настоящего изобретения надувной корпус 100 в летательном аппарате 500-2 может иметь два или более выпускных отверстий (например, два, три, четыре, пять, шесть, семь, восемь, девять, десять и более выпускных отверстий) для выпуска текучей среды, которые снабжены каждое управляемым клапаном, а модуль управления летательного аппарата 500-2 может быть соединен с управляемыми клапанами надувного корпуса 100 с обеспечением возможности управления их работой или возможности изменения их состояния для регулирования выпуска текучей среды из надувного корпуса 100. В одной из разновидностей данного варианта реализации настоящего изобретения по меньшей мере одно или каждое из сопел 200 может одновременно сообщаться посредством текучей среды только с одним из выпускных отверстий надувного корпуса 100, по меньшей мере с двумя выпускными отверстиями надувного корпуса 100 и т.п., при этом выпускные отверстия надувного корпуса 100, с которыми может сообщаться одно из сопел 200, могут совпадать с выпускными отверстиями надувного корпуса 100, с которыми может сообщаться другое сопло из указанных сопел 200, или могут отличаться от них.
В некоторых других вариантах реализации настоящего изобретения надувной корпус 100 в летательном аппарате 500-2 может содержать два или более сопел 200 для выпуска текучей среды, которые могут быть снабжены каждое управляемым клапаном, при этом модуль управления летательного аппарата 500-2 может быть дополнительно соединен с управляемыми клапанами сопел 200 с обеспечением возможности управления их работой или возможности изменения их состояния для регулирования выпуска текучей среды из надувного корпуса 100.
Согласно одному из вариантов реализации настоящего изобретения, летательный аппарат 500-2 может быть выполнен одноразовым (с возможностью его однократного использования), то есть может и не быть предусмотрена возможность повторного (полного или частичного) заполнения внутреннего пространства надувного корпуса 100 текучей средой для повторного использования такого летательного аппарата 500-2.
Кроме того, в состав летательного аппарата 500-2, показанного на фиг. 3, также входит источник питания (не показан) в виде перезаряжаемой аккумуляторной батареи или неперезаряжаемого элемента питания, известного в уровне техники, при этом источник питания (не показан) по сути используется для подачи питания на модуль управления летательного аппарата 500-2, навигационный модуль летательного аппарата 500-2, любые иные управляемые и микроэлектронные компоненты, описанные в данном документе в составе летательного аппарата 500-2, и/или иные функциональные компоненты летательного аппарата 500-2, наличие которых в составе летательного аппарата 500-2 является очевидным для специалиста в данной области техники и которые используются для реализации функционального назначения летательного аппарата 500-2. В некоторых вариантах реализации настоящего изобретения источник питания в летательном аппарате 500-2, показанном на фиг. 3, может представлять собой солнечную батарею или любой иной подходящий источник энергии, известный в уровне техники. В иных вариантах реализации настоящего изобретения летательный аппарат 500-2, показанный на фиг. 3, может быть снабжен двумя или более электрически связанными между собой источниками питания, каждый из которых может содержать одну или более аккумуляторных батарей.
В некоторых вариантах реализации настоящего изобретения летательный аппарат 500-2, показанный на фиг. 3, может быть дополнительно снабжен одним или более крыльями (не показаны), скрепленными с корпусом 100 или выполненные с ним за одно целое, для улучшения управляемости летательным аппаратом 500-2 при его перемещении в воздухе или во время его полета.
Третий вариант реализации летательного аппарата
На фиг. 4 показан один из вариантов реализации летательного аппарата 500-3 согласно третьему аспекту настоящего изобретения, который по сути является одним из альтернативных вариантов реализации вышеописанного летательного аппарата 500-1, показанного на фиг. 1, или вышеописанного летательного аппарата 500-2, показанного на фиг. 3.
Как показано на фиг. 4, летательный аппарат 500-3 содержит корпус 100, выполненный с возможностью его наполнения или заполнения текучей средой под давлением, при этом корпус 100 имеет фиксированные форму и размеры.
В одном из вариантов реализации настоящего изобретения корпус 100 может быть выполнен из эластичного материала, что позволяет надувному корпусу 100 растягиваться при его заполнении текучей средой под давлением с обеспечением увеличения его размера от минимального, который он имеет или принимает в своем первоначальном (ненадутом) состоянии, до целевого размера, который он имеет или принимает в целевом (надутом) состоянии, при этом целевой размер корпуса 100, достигаемый после его полного или частичного заполнения текучей средой под давлением, может соответствовать максимально допустимому размеру корпуса 100, который подходит по габаритным размерам летательного аппарата 500-3, технике безопасности и/или предельным нагрузкам на растяжение, которые способен выдержать эластичный материал, из которого изготовлен указанный корпус 100.
В корпусе 100 в летательном аппарате 500-3, показанном на фиг. 4, размещены модуль связи (не показан), выполненный с возможностью установления связи с внешними источниками данных или внешними управляющими устройствами с обеспечением возможности взаимного обмена данными, навигационный модуль (не показан), выполненный с возможностью определения пространственного местоположения или пространственных координат летательного аппарата 500-3 в реальном времени, и модуль управления (не показан), соединенный с возможностью обмена данными с модулем связи летательного аппарата 500-3 и навигационным модулем летательного аппарата 500-3. Следует отметить, что модуль связи летательного аппарата 500-3 и навигационный модуль летательного аппарата 500-3 выполнены аналогично соответственно вышеописанному модулю 120 связи и вышеописанному навигационному модулю 130. Кроме того, модуль управления летательного аппарата 500-3 и модуль 110 управления, входящий в состав летательного аппарата 500-1, имеют по существу одни и те же особенности исполнения и схожие функциональные особенности. Следует также отметить, что там, где это применимо, вышеописанные варианты реализации летательного аппарата 500-1, варианты реализации летательного аппарата 500-2 и/или их разновидности следует считать относящимися и к летательному аппарату 500-3 согласно третьему аспекту настоящего изобретения.
Кроме того, как показано на фиг. 4, корпус 100 в летательном аппарате 500-3 содержит три независимые полости или камеры, герметично отделенные друг от друга разделительными стенками или разделительными перемычками (перегородками) во внутреннем пространстве корпуса 100 и выполненные с возможностью их заполнения текучей средой под давлением, при этом каждая из указанных камер корпуса 100 может иметь одно или более выпускных отверстий, снабженных каждое управляемым кланом, работой которого управляет или состояние которого изменяет модуль управления летательного аппарата 500-3, при этом в указанных камерах может быть размещена одна и та же текучая среда (в частности, текучая среда с одной и той же плотностью, например гелий) или могут быть размещены разные текучие среды (в частности, текучие среды с разной плотностью). Следует отметить, в каждой из трех камер корпуса 100 в летательном аппарате 500-3 выпускные отверстия и их управляемые клапаны обеспечивают возможность сообщения посредством текучей среды указанной камеры корпуса 100 с соответствующим одним из трех сопел 200. Следует также отметить, что для заполнения камер корпуса 100 в летательном аппарате 500-3 могут быть использованы управляемые клапаны (не показаны), которыми снабжены выпускные отверстия камер корпуса 100 или отдельные заправочные клапаны (не показаны), которые могут быть выполнены каждый в стенке корпуса 100 с обеспечением возможности сообщения посредством текучей среды с соответствующей одной из камер корпуса 100 и каждый из которых может быть подключен к заправочной станции (не показана) для заправки текучей средой, заправочному баллону с необходимой текучей средой или любым иным известным в уровне техники средствам заправки емкостей, подходящим для ручной, полуавтоматической или автоматической заправки камер корпуса 100 текучей средой под давлением.
Модуль управления летательного аппарата 500-3 соединен с навигационным модулем летательного аппарата 500-3 с возможностью приема от него определенных пространственных координат и выполнен с обеспечением возможности регулируемого выпуска текучей среды по меньшей мере из одной или каждой камеры корпуса 100 для управления перемещением летательного аппарата 500-3 по воздуху или управления полетом летательного аппарата 500-3.
Как показано на фиг. 4, корпус 100 в летательном аппарате 500-3 снабжен со своей внешней стороны тремя соплами 200, каждое из которых съемно установлено или закреплено в фиксированном положении по отношению к корпусу 100 и каждое из которых сообщается посредством текучей среды с внутренним пространством соответствующей одной из трех камер корпуса 100, которые при эксплуатации или использовании летательного аппарата 500-3 оказываются наполненными или заполненными каждая текучей средой, при этом каждое из трех сопел 200, которыми снабжен корпус 100 в летательном аппарате 500-3, может быть выполнено аналогично любому из сопел 200, описанных выше в данном документе в отношении летательного аппарата 500-1. Таким образом, в летательном аппарате 500-3 сопла 200 поставлены каждое в функциональное соответствие с камерами корпуса 100.
В одном из вариантов реализации настоящего изобретения по меньшей мере одна из камер корпуса 100 или по меньшей мере две камеры из камер корпуса 100 в летательном аппарате 500-3 могут быть предварительно заполнены текучей средой, так что при эксплуатации или использовании летательного аппарата 500-3 поток текучей среды, создающий тягу, могут быть выпущен не из каждого сопла 200, а только по меньшей мере из одного или каждого из сопел 200, которые сообщаются с камерами корпуса 100, заполненными текучей средой под давлением.
Еще в одном варианте реализации настоящего изобретения по меньшей мере две смежные камеры из камер корпуса 100 в летательном аппарате 500-3 могут сообщаться друг с другом, в связи с чем при заполнении текучей средой под давлением одной из указанных сообщающихся камер корпуса 100 указанная текучая среда переходит и в другую камеру из указанных сообщающихся камер корпуса 100.
В другом варианте реализации настоящего изобретения корпус 100 в летательном аппарате 500-3, показанном на фиг. 4, может содержать по меньшей мере две независимые полости или камеры (например, две, три, четыре, пять, шесть, семь, восемь, девять, десять и более камер), герметично отделенные друг от друга разделительными стенками или разделительными перемычками (перегородками) во внутреннем пространстве корпуса 100 и выполненные с возможностью их заполнения текучей средой под давлением, при этом каждая из указанных камер корпуса 100 может иметь одно или более выпускных отверстий, снабженных каждое управляемым кланом, работой которого управляет или состояние которого изменяет модуль управления летательного аппарата 500-3, при этом в указанных камерах может быть размещена одна и та же текучая среда (в частности, текучая среда с одной и той же плотностью, например гелий) или могут быть размещены разные текучие среды (в частности, текучие среды с разной плотностью).
Модуль управления летательного аппарата 500-3, соединенный с управляемыми клапанами выпускных отверстий, соответствующих камерам корпуса 100 в летательном аппарате 500-3, обеспечивает возможность управления состоянием по меньшей мере одного или каждого из указанных клапанов для регулирования выпуска текучей среды из соответствующих камер корпуса 100. Таким образом, модуль управления летательного аппарата 500-3 обеспечивает возможность подачи текучей среды из разных камер корпуса 100 в одно и то же сопло 200, возможность подачи текучей среды из разных камер корпуса 100 по меньшей мере в одно из сопел 200 или возможность подачи текучей среды из разных камер корпуса 100 в каждое из сопел 200 по существу одновременно или в заданной последовательности (например, через заданные промежутки времени) с поддержанием расхода подаваемой текучей среды или подаваемых текучих сред в течение заданного периода времени или с изменением расхода подаваемой текучей среды или подаваемых текучих сред через заданный интервал времени.
В ином варианте реализации настоящего изобретения количество сопел 200 и количество камер корпуса 100 в летательном аппарате 500-3 могут и не совпадать. В одном из разновидностей данного варианта реализации настоящего изобретения корпус 100 может быть снабжен двумя соплами 200 и может содержать три изолированные друг от друга камеры, выполненные каждая с возможностью их заполнения текучей средой под давлением, при этом каждое из сопел 200 может сообщаться посредством текучей среды с соответствующей одной из трех камер корпуса 100, а поток текучей среды из оставшейся камеры корпуса 100 может быть перекрыт или перенаправлен с одного сопла 200 на другое сопло 200 с использованием распределительного устройства (не показано). В другой разновидности данного варианта реализации настоящего изобретения корпус 100 может быть снабжен двумя соплами 200 и может содержать три изолированные друг от друга камеры, выполненные каждая с возможностью их заполнения текучей средой под давлением, при этом одно из сопел 200 может сообщаться посредством текучей среды с соответствующим двумя из трех камер надуваемого корпуса 100, а другое сопло из указанных сопел 200 может сообщаться посредством текучей среды с оставшейся одной камерой корпуса 100. Еще в одной разновидности данного варианта реализации настоящего изобретения корпус 100 может быть снабжен множеством сопел 200 и может содержать множество изолированных друг от друга камер, выполненных каждая с возможностью их заполнения текучей средой под давлением, при этом указанные сопла 200 и указанные изолированные камеры корпуса 100 могут сообщаться друг с другом посредством текучей среды по принципу один к одному (т.е. каждое сопло 200 с соответствующей одной из изолированных камер корпуса 100), либо одно или более из указанных сопел 200 могут сообщаться каждое посредством текучей среды по меньшей мере с двумя изолированными камерами из указанных изолированных камер корпуса 100.
В некотором варианте реализации настоящего изобретения корпус 100 в летательном аппарате 500-3 может содержать два или более выпускных патрубков (не показаны) для выпуска текучей среды, которые могут быть соединены каждый посредством текучей среды по меньшей мере с одной из изолированных камер корпуса 100 и которые могут быть снабжены каждый по меньшей мере одним управляемым клапаном, при этом модуль управления летательного аппарата 500-3 может быть дополнительно соединен с управляемыми клапанами патрубков с обеспечением возможности управления их работой или возможности изменения их состояния для регулирования выпуска текучей среды из изолированных камер корпуса 100.
Согласно одному из вариантов реализации настоящего изобретения, летательный аппарат 500-3 может быть выполнен одноразовым (с возможностью его однократного использования), то есть может и не быть предусмотрена возможность повторного (полного или частичного) заполнения по меньшей мере одной из изолированных камер корпуса 100 текучей средой для повторного использования такого летательного аппарата 500-3.
Кроме того, в состав летательного аппарата 500-3, показанного на фиг. 4, также входит источник питания (не показан) в виде перезаряжаемой аккумуляторной батареи или неперезаряжаемого элемента питания, известного в уровне техники, при этом источник питания (не показан) по сути используется для подачи питания на модуль управления летательного аппарата 500-3, навигационный модуль летательного аппарата 500-3, любые иные управляемые и микроэлектронные компоненты, описанные в данном документе в составе летательного аппарата 500-3, и/или иные функциональные компоненты летательного аппарата 500-3, наличие которых в составе летательного аппарата 500-3 является очевидным для специалиста в данной области техники и которые используются для реализации функционального назначения летательного аппарата 500-3. В некоторых вариантах реализации настоящего изобретения источник питания в летательном аппарате 500-3, показанном на фиг. 4, может представлять собой солнечную батарею или любой иной подходящий источник энергии, известный в уровне техники. В иных вариантах реализации настоящего изобретения летательный аппарат 500-3, показанный на фиг. 4, может быть снабжен двумя или более электрически связанными между собой источниками питания, каждый из которых может содержать одну или более аккумуляторных батарей.
В некоторых вариантах реализации настоящего изобретения летательный аппарат 500-3, показанный на фиг. 4, может быть дополнительно снабжен одним или более крыльями (не показаны), скрепленными с корпусом 100 или выполненные с ним за одно целое, для улучшения управляемости летательным аппаратом 500-3 при его перемещении в воздухе или во время его полета.
Первый вариант реализации заправочной станции
На фиг. 5 показан один из вариантов реализации заправочной станции 400 согласно четвертому аспекту настоящего изобретения, используемой в качестве примера для заправки текучей средой под давлением надувного корпуса 100 в летательном аппарате 500-2, показанном на фиг. 3 и описанном выше в данном документе, что позволяет по меньшей мере частично или полностью восстановить запас хода летательного аппарата 500-2.
Как показано на фиг. 5, летательный аппарат 500-2 при уменьшении запаса текучей среды, содержащейся внутри надувного корпуса 100, до минимально допустимого (критического) объема или уменьшении запаса хода летательного аппарата 500-2 до минимально допустимого (критического) уровня прекращает набор высоты, выполнение полетного задания, полет в соответствии с заданным маршрутом полета и/или полет до целевого пункта назначения и летит под управлением модуля управления летательного аппарата 500-2, управляющего процессом выпуска текучей среды из сопел 200 и, следовательно, управляющего полетом летательного аппарата 500-2 в реальном времени, в сторону заправочной станции 400, которая имеет заданные координаты местоположения (например, в случае, когда заправочная станция 400 имеет фиксированное местоположение в пространстве), известные модулю управления летательного аппарата 500-2, или которая передает свои текущие координаты в реальном времени (например, в случае, когда заправочная станция 400 является мобильной или установлена на транспортном средстве), принимаемые модулем 120 связи и выдаваемые в модуль управления летательного аппарата 500-2. При подлете летательного аппарата 500-2 к заправочной станции 400 одно из сопел 200, в частности центральное сопло 200 на фиг. 5, расположенное между боковыми соплами 200, входит в разъемное взаимодействие с заправочной станцией 400, в результате которого центральное сопло 200 оказывается соединенным с накопительным резервуаром 410 для текучей среды (выполняет функцию хранилища для хранения текучей среды, используемой для восполнения запаса хода летательных аппаратов), установленным в корпусе заправочной станции 400 и заполненном текучей средой под давлением, с помощью подающего трубопровода 420, установленного в корпусе заправочной станции 400. Следует отметить, что при стыковке летательного аппарата 500-2 с заправочной станцией 400 используется специальный переходник 600, выполненный на конце подающего трубопровода 420, противоположном другому концу подающего трубопровода 420, используемому для соединения подающего трубопровода 420 с накопительным резервуаром 410, и сообщающийся посредством текучей среды с подающим трубопроводом 420, причем указанный переходник 600 выполнен с обеспечением возможности пристыковки сопла 200 к заправочной станции 400 для осуществления сообщения посредством текучей среды между пристыкованным соплом 420 и подающим трубопроводом 420, что позволяет направлять текучую среду под давлением из накопительного резервуара 410 во внутреннее пространство корпуса 100. Другими словами, в результате стыковки летательного аппарата 500-2 с заправочной станцией 400 подающий трубопровод 420 обеспечивает возможность сообщения посредством текучей среды между накопительным резервуаром 410 и центральным соплом 200, которое в свою очередь сообщается посредством текучей среды с внутренним пространством надувного корпуса 100, то есть подающий трубопровод 420 по сути обеспечивает возможность сообщения посредством текучей среды между накопительным резервуаром 410 и внутренним пространством надувного корпуса 100. Таким образом, подающий трубопровод 420 в заправочной станции 400 выполняет функцию одного из средств подачи текучей среды, выполненного с возможностью разъемного подключения к надувному корпусу 100 с обеспечением возможности подачи текучей среды из накопительного резервуара 410 к одному из сопел 200 (в частности, к центральному соплу 200) для заполнения текучей средой под давлением внутреннего пространства указанного корпуса 100.
Согласно одному из вариантов реализации настоящего изобретения при стыковке летательного аппарата 500-2 с заправочной станцией 400 подающий трубопровод 420 может быть соединен по меньшей мере с одним или каждым из сопел 200 с обеспечением возможности сообщения посредством текучей среды между накопительным резервуаром 410 и указанным соплом 200. Другими словами, в данном варианте реализации настоящего изобретения подающий трубопровод 420 может сообщаться посредством текучей среды только с одним из сопел 200, только с двумя из сопел 200 или со всеми тремя соплами 200 с обеспечением возможности подачи текучей среды из накопительного резервуара 410 во внутреннее пространство надувного корпуса 100.
В одном из вариантов реализации настоящего изобретения стыковка летательного аппарата 500-2, подлетевшего к заправочной станции 400, с заправочной станцией 400 может быть осуществлена вручную оператором заправочной станции 400, при этом указанный оператор заправочной станции 400 может также вручную запустить процесс подачи текучей среды из накопительного резервуара 410 во внутреннее пространство надувного корпуса 100, по завершению которого корпус 100 оказывается полностью или частично надутым. В одной из разновидностей данного варианта реализации настоящего изобретения после осуществления ручной стыковки летательного аппарата 500-2 с заправочной станцией 400 модуль управления летательного аппарата 500-2 может перехватить управление заправочной станцией 400 с обеспечением возможности подачи текучей среды из накопительного резервуара 410 во внутреннее пространство надувного корпуса 100 в автоматическом режиме под управлением модуля управления летательного аппарата 500-2, управляющего работой летательного аппарата 500-2 и временно управляющего работой заправочной станции 400. В другой разновидности данного варианта реализации настоящего изобретения после осуществления ручной стыковки летательного аппарата 500-2 с заправочной станцией 400 управляющее устройство заправочной станции 400 может перехватить управление летательным аппаратом 500-2 с обеспечением возможности подачи текучей среды из накопительного резервуара 410 во внутреннее пространство надувного корпуса 100 в автоматическом режиме под управлением управляющего устройства заправочной станции 400, управляющего работой заправочной станции 400 и временно управляющего работой летательного аппарата 500-2.
В другом варианте реализации настоящего изобретения стыковка летательного аппарата 500-2, подлетевшего к заправочной станции 400, с заправочной станцией 400 может быть осуществлена в полуавтоматическом режиме под управлением модуля управления летательного аппарата 500-2 или управляющего устройства заправочной станции 400, которое может перехватить управление подлетевшим летательным аппаратом 500-2. В частности, в данном варианте реализации настоящего изобретения при подлете летательного аппарата 500-2 к заправочной станции 400 модуль управления летательного аппарата 500-2 или управляющее устройство заправочной станции 400 обеспечивает возможность стыковки указанного летательного аппарата 500-2 с заправочной станцией 400 в автоматическом режиме, при этом после завершения указанного процесса стыковки под управлением модуля управления летательного аппарата 500-2 или управлением управляющего устройства заправочной станции 400 оператор вручную приводит в действие вспомогательные зажимы или фиксаторы (не показаны) для обеспечения жесткого соединения между летательным аппаратом 500-2 и заправочной станцией 400. В одной из разновидностей данного варианта реализации настоящего изобретения после осуществления полуавтоматической стыковки летательного аппарата 500-2 с заправочной станцией 400 модуль управления летательного аппарата 500-2 может перехватить управление заправочной станцией 400 с обеспечением возможности подачи текучей среды из накопительного резервуара 410 во внутреннее пространство надувного корпуса 100 в автоматическом режиме под управлением модуля управления летательного аппарата 500-2, управляющего работой летательного аппарата 500-2 и временно управляющего работой заправочной станции 400. В другой разновидности данного варианта реализации настоящего изобретения после осуществления полуавтоматической стыковки летательного аппарата 500-2 с заправочной станцией 400 управляющее устройство заправочной станции 400 может перехватить управление летательным аппаратом 500-2 с обеспечением возможности подачи текучей среды из накопительного резервуара 410 во внутреннее пространство надувного корпуса 100 в автоматическом режиме под управлением управляющего устройства заправочной станции 400, управляющего работой заправочной станции 400 и временно управляющего работой летательного аппарата 500-2. Еще в одной разновидности данного варианта реализации настоящего изобретения после осуществления полуавтоматической стыковки летательного аппарата 500-2 с заправочной станцией 400 оператор заправочной станции 400 может вручную запустить (например, путем нажатия на кнопку запуска на корпусе заправочной станции 400) и самостоятельно контролировать (например, с помощью индикаторов на корпусе заправочной станции 400) процесс подачи текучей среды из накопительного резервуара 410 во внутреннее пространство надувного корпуса 100.
Еще в одном варианте реализации настоящего изобретения стыковка летательного аппарата 500-2, подлетевшего к заправочной станции 400, с заправочной станцией 400 может быть осуществлена в автоматическом режиме под управлением модуля управления летательного аппарата 500-2 или управляющего устройства заправочной станции 400, которое может перехватить управление подлетевшим летательным аппаратом 500-2. В частности, в данном варианте реализации настоящего изобретения при подлете летательного аппарата 500-2 к заправочной станции 400 модуль управления летательного аппарата 500-2 или управляющее устройство заправочной станции 400 обеспечивает возможность жесткой стыковки указанного летательного аппарата 500-2 с заправочной станцией 400 полностью в автоматическом режиме. В одной из разновидностей данного варианта реализации настоящего изобретения после осуществления автоматической стыковки летательного аппарата 500-2 с заправочной станцией 400 модуль управления летательного аппарата 500-2 может перехватить управление заправочной станцией 400 с обеспечением возможности подачи текучей среды из накопительного резервуара 410 во внутреннее пространство надувного корпуса 100 в автоматическом режиме под управлением модуля управления летательного аппарата 500-2, управляющего работой летательного аппарата 500-2 и временно управляющего работой заправочной станции 400. В другой разновидности данного варианта реализации настоящего изобретения после осуществления автоматической стыковки летательного аппарата 500-2 с заправочной станцией 400 управляющее устройство заправочной станции 400 может перехватить управление летательным аппаратом 500-2 с обеспечением возможности подачи текучей среды из накопительного резервуара 410 во внутреннее пространство надувного корпуса 100 в автоматическом режиме под управлением управляющего устройства заправочной станции 400, управляющего работой заправочной станции 400 и временно управляющего работой летательного аппарата 500-2. Еще в одной разновидности данного варианта реализации настоящего изобретения после осуществления автоматической стыковки летательного аппарата 500-2 с заправочной станцией 400 оператор заправочной станции 400 может вручную запустить (например, путем нажатия на кнопку запуска на корпусе заправочной станции 400) и самостоятельно контролировать (например, с помощью индикаторов на корпусе заправочной станции 400) процесс подачи текучей среды из накопительного резервуара 410 во внутреннее пространство надувного корпуса 100.
В ином варианте реализации настоящего изобретения средства подачи текучей среды могут дополнительно содержать компрессор (не показан), соединенный внутри корпуса заправочной станции 400 с подающим трубопроводом 420 или установленный в разрыве подающего трубопровода 420 и выполненный с возможностью забора текучей среды из накопительного резервуара 410.
В некотором ином варианте реализации настоящего изобретения средства подачи текучей среды могут дополнительно содержать компрессор (не показан), соединенный внутри корпуса заправочной станции 400 с подающим трубопроводом 420 и выполненный с возможностью забора текучей среды из внешней среды (например, из водоема, колонки, бака с текучей средой или т.п.хранилища с текучей средой за пределами корпуса заправочной станции 400).
В некотором другом варианте реализации настоящего изобретения средства подачи текучей среды могут представлять собой компрессор (не показан), установленный внутри корпуса заправочной станции 400 таким образом, что он соединен с накопительным резервуаром 410 и выполнен с возможностью разъемного подключения к одному или более из сопел 200 с обеспечением возможности забора текучей среды из накопительного резервуара 410 для подачи забранной текучей среды во внутреннее пространство надувного корпуса 100 с использованием по меньшей мере одного или каждого из указанных сопел 200. В одной из разновидностей данного варианта реализации настоящего изобретения компрессор (не показан), установленный внутри корпуса заправочной станции 400 и выполняющий функцию средств подачи текучей среды для подачи текучей среды из накопительного резервуара 410 во внутреннее пространство надувного корпуса 100, может быть дополнительно выполнен с возможностью изменения давления текучей среды, забранной из накопительного резервуара 410 и подаваемой во внутреннее пространство надувного корпуса 100 посредством одного или более из сопел 200.
В различных вариантах реализации настоящего изобретения летательный аппарат 500-2 может быть дополнительно снабжен парашютной системой посадки (не показана), активируемой или приводимой в действие при достижении остаточным объемом текучей среды в надувном корпусе 100 предельно допустимого (критического) значения или при существенном исчерпании текучей среды в надувном корпусе 100, так что летательный аппарат 500-2 может долететь до заправочной станции 400 с использованием парашютной системы посадки (не показана), которая может быть приведена в действие с помощью модуля управления летательного аппарата 500-2.
В различных иных вариантах реализации настоящего изобретения летательный аппарат 500-2 может быть дополнительно снабжен одним или более воздушными движителями (не показаны), приводимыми в действие при достижении остаточным объемом текучей среды в надувном корпусе 100 предельно допустимого (критического) значения или при существенном исчерпании текучей среды в надувном корпусе 100, так что летательный аппарат 500-2 может долететь до заправочной станции 400 с использованием по меньшей мере одного из указанных дополнительных движителей (не показаны), который может быть приведен в действие с помощью модуля управления летательного аппарата 500-2.
Второй вариант реализации заправочной станции
На фиг. 6 показан один из вариантов реализации заправочной станции 400 согласно пятому аспекту настоящего изобретения, используемой в качестве примера для заправки текучей средой под давлением по меньшей мере одной или каждой из изолированных камер корпуса 100 в летательном аппарате 500-3, показанном на фиг. 4 и описанном выше в данном документе, что позволяет по меньшей мере частично или полностью восстановить запас хода летательного аппарата 500-3.
Как показано на фиг. 6, летательный аппарат 500-3 при уменьшении запаса текучей среды, содержащейся в изолированных камерах корпуса 100, до минимально допустимого (критического) объема или уменьшении запаса хода летательного аппарата 500-3 до минимально допустимого (критического) уровня прекращает набор высоты, выполнение полетного задания, полет в соответствии с заданным маршрутом полета и/или полет до целевого пункта назначения и летит под управлением модуля управления летательного аппарата 500-3, управляющего процессом выпуска текучей среды из сопел 200 и, следовательно, управляющего полетом летательного аппарата 500-3 в реальном времени, в сторону заправочной станции 400, которая имеет заданные координаты местоположения (например, в случае, когда заправочная станция 400 имеет фиксированное местоположение в пространстве), известные модулю управления летательного аппарата 500-3, или которая передает свои текущие координаты в реальном времени (например, в случае, когда заправочная станция 400 является мобильной или установлена на транспортном средстве), принимаемые модулем связи летательного аппарата 500-3 и выдаваемые в модуль управления летательного аппарата 500-3. При подлете летательного аппарата 500-3 к заправочной станции 400 одно из сопел 200, в частности центральное сопло 200 на фиг. 6, расположенное между боковыми соплами 200, входит в разъемное взаимодействие с заправочной станцией 400, в результате которого центральное сопло 200 оказывается соединенным с накопительным резервуаром 410 для текучей среды (выполняет функцию хранилища для хранения текучей среды, используемой для восполнения запаса хода летательных аппаратов), установленным в корпусе заправочной станции 400 и заполненном текучей средой под давлением, с помощью подающего трубопровода 420, установленного в корпусе заправочной станции 400. Следует отметить, что при стыковке летательного аппарата 500-3 с заправочной станцией 400 используется специальный переходник 600, выполненный на конце подающего трубопровода 420, противоположном другому концу подающего трубопровода 420, используемому для соединения подающего трубопровода 420 с накопительным резервуаром 410, и сообщающийся посредством текучей среды с подающим трубопроводом 420, причем указанный переходник 600 выполнен с обеспечением возможности пристыковки сопла 200 к заправочной станции 400 для осуществления сообщения посредством текучей среды между пристыкованным соплом 420 и подающим трубопроводом 420, что позволяет направлять текучую среду под давлением из накопительного резервуара 410 по меньшей мере в одну или каждую из изолированных камер корпуса 100. Другими словами, в результате стыковки летательного аппарата 500-3 с заправочной станцией 400 подающий трубопровод 420 обеспечивает возможность сообщения посредством текучей среды между накопительным резервуаром 410 и центральным соплом 200, которое в свою очередь сообщается посредством текучей среды по меньшей мере с одной или с каждой из изолированных камер корпуса 100, то есть подающий трубопровод 420 по сути обеспечивает возможность сообщения посредством текучей среды между накопительным резервуаром 410 и одной или более из изолированных камер корпуса 100. Таким образом, подающий трубопровод 420 в заправочной станции 400 выполняет функцию одного из средств подачи текучей среды, выполненного с возможностью разъемного подключения к корпусу 100 с обеспечением возможности подачи текучей среды из накопительного резервуара 410 к одному из сопел 200 (в частности, к центральному соплу 200) для заполнения текучей средой под давлением соответственно по меньшей мере одной или каждой из изолированных камер корпуса 100.
Согласно одному из вариантов реализации настоящего изобретения при стыковке летательного аппарата 500-3 с заправочной станцией 400 подающий трубопровод 420 может быть соединен по меньшей мере с одним или каждым из сопел 200 с обеспечением возможности сообщения посредством текучей среды между накопительным резервуаром 410 и указанным соплом 200. Другими словами, в данном варианте реализации настоящего изобретения подающий трубопровод 420 может сообщаться посредством текучей среды только с одним из сопел 200, только с двумя из сопел 200 или со всеми тремя соплами 200 с обеспечением возможности подачи текучей среды из накопительного резервуара 410 соответственно только в одну из изолированных камер корпуса 100, только в две из изолированных камер корпуса 100 или все изолированные камеры корпуса 100.
В одном из вариантов реализации настоящего изобретения стыковка летательного аппарата 500-3, подлетевшего к заправочной станции 400, с заправочной станцией 400 может быть осуществлена вручную оператором заправочной станции 400, при этом указанный оператор заправочной станции 400 может также вручную запустить процесс подачи текучей среды из накопительного резервуара 410 в одной или более изолированных камер корпуса 100, по завершению которого изолированные камеры корпуса 100 могут быть полностью или частично заполнены текучей средой под давлением. В одной из разновидностей данного варианта реализации настоящего изобретения после осуществления ручной стыковки летательного аппарата 500-3 с заправочной станцией 400 модуль управления летательного аппарата 500-3 может перехватить управление заправочной станцией 400 с обеспечением возможности подачи текучей среды из накопительного резервуара 410 в одну или более изолированных камер корпуса 100 в автоматическом режиме под управлением модуля управления летательного аппарата 500-3, управляющего работой летательного аппарата 500-3 и временно управляющего работой заправочной станции 400. В другой разновидности данного варианта реализации настоящего изобретения после осуществления ручной стыковки летательного аппарата 500-3 с заправочной станцией 400 управляющее устройство заправочной станции 400 может перехватить управление летательным аппаратом 500-3 с обеспечением возможности подачи текучей среды из накопительного резервуара 410 в одну или более изолированных камер корпуса 100 в автоматическом режиме под управлением управляющего устройства заправочной станции 400, управляющего работой заправочной станции 400 и временно управляющего работой летательного аппарата 500-3.
В другом варианте реализации настоящего изобретения стыковка летательного аппарата 500-3, подлетевшего к заправочной станции 400, с заправочной станцией 400 может быть осуществлена в полуавтоматическом режиме под управлением модуля управления летательного аппарата 500-3 или управляющего устройства заправочной станции 400, которое может перехватить управление подлетевшим летательным аппаратом 500-3. В частности, в данном варианте реализации настоящего изобретения при подлете летательного аппарата 500-3 к заправочной станции 400 модуль управления летательного аппарата 500-3 или управляющее устройство заправочной станции 400 обеспечивает возможность стыковки указанного летательного аппарата 500-3 с заправочной станцией 400 в автоматическом режиме, при этом после завершения указанного процесса стыковки под управлением модуля управления летательного аппарата 500-3 или управлением управляющего устройства заправочной станции 400 оператор вручную приводит в действие вспомогательные зажимы или фиксаторы (не показаны) для обеспечения жесткого соединения между летательным аппаратом 500-3 и заправочной станцией 400. В одной из разновидностей данного варианта реализации настоящего изобретения после осуществления полуавтоматической стыковки летательного аппарата 500-3 с заправочной станцией 400 модуль управления летательного аппарата 500-3 может перехватить управление заправочной станцией 400 с обеспечением возможности подачи текучей среды из накопительного резервуара 410 в одну или более изолированных камер корпуса 100 в автоматическом режиме под управлением модуля управления летательного аппарата 500-3, управляющего работой летательного аппарата 500-3 и временно управляющего работой заправочной станции 400. В другой разновидности данного варианта реализации настоящего изобретения после осуществления полуавтоматической стыковки летательного аппарата 500-3 с заправочной станцией 400 управляющее устройство заправочной станции 400 может перехватить управление летательным аппаратом 500-3 с обеспечением возможности подачи текучей среды из накопительного резервуара 410 в одну или более изолированных камер корпуса 100 в автоматическом режиме под управлением управляющего устройства заправочной станции 400, управляющего работой заправочной станции 400 и временно управляющего работой летательного аппарата 500-3. Еще в одной разновидности данного варианта реализации настоящего изобретения после осуществления полуавтоматической стыковки летательного аппарата 500-3 с заправочной станцией 400 оператор заправочной станции 400 может вручную запустить (например, путем нажатия на кнопку запуска на корпусе заправочной станции 400) и самостоятельно контролировать (например, с помощью индикаторов на корпусе заправочной станции 400) процесс подачи текучей среды из накопительного резервуара 410 в одну или более изолированных камер корпуса 100.
Еще в одном варианте реализации настоящего изобретения стыковка летательного аппарата 500-3, подлетевшего к заправочной станции 400, с заправочной станцией 400 может быть осуществлена в автоматическом режиме под управлением модуля управления летательного аппарата 500-3 или управляющего устройства заправочной станции 400, которое может перехватить управление подлетевшим летательным аппаратом 500-3. В частности, в данном варианте реализации настоящего изобретения при подлете летательного аппарата 500-3 к заправочной станции 400 модуль управления летательного аппарата 500-3 или управляющее устройство заправочной станции 400 обеспечивает возможность жесткой стыковки указанного летательного аппарата 500-3 с заправочной станцией 400 полностью в автоматическом режиме. В одной из разновидностей данного варианта реализации настоящего изобретения после осуществления автоматической стыковки летательного аппарата 500-3 с заправочной станцией 400 модуль управления летательного аппарата 500-3 может перехватить управление заправочной станцией 400 с обеспечением возможности подачи текучей среды из накопительного резервуара 410 в одну или более изолированных камер корпуса 100 в автоматическом режиме под управлением модуля управления летательного аппарата 500-3, управляющего работой летательного аппарата 500-3 и временно управляющего работой заправочной станции 400. В другой разновидности данного варианта реализации настоящего изобретения после осуществления автоматической стыковки летательного аппарата 500-3 с заправочной станцией 400 управляющее устройство заправочной станции 400 может перехватить управление летательным аппаратом 500-3 с обеспечением возможности подачи текучей среды из накопительного резервуара 410 в одну или более изолированных камер корпуса 100 в автоматическом режиме под управлением управляющего устройства заправочной станции 400, управляющего работой заправочной станции 400 и временно управляющего работой летательного аппарата 500-3. Еще в одной разновидности данного варианта реализации настоящего изобретения после осуществления автоматической стыковки летательного аппарата 500-3 с заправочной станцией 400 оператор заправочной станции 400 может вручную запустить (например, путем нажатия на кнопку запуска на корпусе заправочной станции 400) и самостоятельно контролировать (например, с помощью индикаторов на корпусе заправочной станции 400) процесс подачи текучей среды из накопительного резервуара 410 в одну или более изолированных камер корпуса 100.
В ином варианте реализации настоящего изобретения средства подачи текучей среды могут дополнительно содержать компрессор (не показан), соединенный внутри корпуса заправочной станции 400 с подающим трубопроводом 420 или установленный в разрыве подающего трубопровода 420 и выполненный с возможностью забора текучей среды из накопительного резервуара 410.
В некотором ином варианте реализации настоящего изобретения средства подачи текучей среды могут дополнительно содержать компрессор (не показан), соединенный внутри корпуса заправочной станции 400 с подающим трубопроводом 420 и выполненный с возможностью забора текучей среды из внешней среды (например, из водоема, колонки, бака с текучей средой или т.п. хранилища с текучей средой за пределами корпуса заправочной станции 400).
В некотором другом варианте реализации настоящего изобретения средства подачи текучей среды могут представлять собой компрессор (не показан), установленный внутри корпуса заправочной станции 400 таким образом, что он соединен с накопительным резервуаром 410 и выполнен с возможностью разъемного подключения к одному или более из сопел 200 с обеспечением возможности забора текучей среды из накопительного резервуара 410 для подачи забранной текучей среды в одну или более изолированных камер корпуса 100 с использованием по меньшей мере одного или каждого из указанных сопел 200. В одной из разновидностей данного варианта реализации настоящего изобретения компрессор (не показан), установленный внутри корпуса заправочной станции 400 и выполняющий функцию средств подачи текучей среды для подачи текучей среды из накопительного резервуара 410 в одну или более изолированных камер корпуса 100, может быть дополнительно выполнен с возможностью изменения давления текучей среды, забранной из накопительного резервуара 410 и подаваемой в одну или более изолированных камер корпуса 100 посредством одного или более из сопел 200.
В различных вариантах реализации настоящего изобретения летательный аппарат 500-3 может быть дополнительно снабжен парашютной системой посадки (не показана), активируемой или приводимой в действие при достижении остаточным объемом текучей среды в изолированных камерах корпуса 100 предельно допустимого (критического) значения или при существенном исчерпании текучей среды в изолированных камерах корпуса 100, так что летательный аппарат 500-3 может долететь до заправочной станции 400 с использованием парашютной системы посадки (не показана), которая может быть приведена в действие с помощью модуля управления летательного аппарата 500-3.
В различных иных вариантах реализации настоящего изобретения летательный аппарат 500-3 может быть дополнительно снабжен одним или более воздушными движителями (не показаны), приводимыми в действие при достижении остаточным объемом текучей среды в изолированных камерах корпуса 100 предельно допустимого (критического) значения или при существенном исчерпании текучей среды в изолированных камерах корпуса 100, так что летательный аппарат 500-3 может долететь до заправочной станции 400 с использованием по меньшей мере одного из указанных дополнительных движителей (не показаны), который может быть приведен в действие с помощью модуля управления летательного аппарата 500-3.
В некоторых вариантах реализации настоящего изобретения все изолированные камеры корпуса 100 в летательном аппарате 500-3 могут быть заполнены текучей средой под давлением по существу одновременно или последовательно при однократной притыковке летательного аппарата 500-3 к заправочной станции 400.
В некоторых иных вариантах реализации настоящего изобретения при однократной притыковке летательного аппарата 500-3 к заправочной станции 400 текучей средой под давлением может быть заполнена только одна из изолированных камер корпуса 100, сообщающаяся посредством текучей среды с одним из сопел 200, использованных для осуществления указанной стыковки. Таким образом, в таких вариантах реализации настоящего изобретения для заполнения всех изолированных камер корпуса 100 летательный аппарат 500-3 должен последовательно пристыковываться к заправочной станции 400 каждый раз с использованием того сопла 200, которое сообщается посредством текучей среды с той изолированной камерой корпуса 100, которая должна быть заполнена текучей средой под давлением.
Третий вариант реализации заправочной станции
На фиг. 7 показан один из вариантов реализации заправочной станции 400 согласно пятому аспекту настоящего изобретения, используемой в качестве примера для заправки текучей средой под давлением емкости 300 в летательном аппарате 500-1, показанном на фиг. 2 и описанном выше в данном документе, что позволяет по меньшей мере частично или полностью восстановить запас хода летательного аппарата 500-1, показанного на фиг. 2.
В одном из вариантов реализации настоящего изобретения заправочная станция 400 согласно пятому аспекту настоящего изобретения может быть использована для заправки текучей средой под давлением по меньшей мере одной или каждой из емкостей 300 в летательном аппарате 500-1, показанном на фиг. 1 и описанном выше в данном документе, что позволяет по меньшей мере частично или полностью восстановить запас хода летательного аппарата 500-1, показанного на фиг. 1.
Как показано на фиг. 7, летательный аппарат 500-1 по фиг. 2 при уменьшении запаса текучей среды, содержащейся емкости 300, установленной в корпусе 100, до минимально допустимого (критического) объема или уменьшении запаса хода летательного аппарата 500-1 по фиг. 2, до минимально допустимого (критического) уровня прекращает набор высоты, выполнение полетного задания, полет в соответствии с заданным маршрутом полета и/или полет до целевого пункта назначения и летит под управлением модуля 110 управления, управляющего процессом выпуска текучей среды из сопел 200 и, следовательно, управляющего полетом летательного аппарата 500-1 по фиг. 2 в реальном времени, в сторону заправочной станции 400, которая имеет заданные координаты местоположения (например, в случае, когда заправочная станция 400 имеет фиксированное местоположение в пространстве), известные модулю управления летательного аппарата 500-1 по фиг. 2, или которая передает свои текущие координаты в реальном времени (например, в случае, когда заправочная станция 400 является мобильной или установлена на транспортном средстве), принимаемые модулем 120 связи и выдаваемые в модуль 110 управления. При подлете летательного аппарата 500-1 по фиг. 2 к заправочной станции 400 одно из сопел 200, в частности центральное сопло 200 на фиг. 7, расположенное между боковыми соплами 200, входит в разъемное взаимодействие с заправочной станцией 400, в результате которого центральное сопло 200 оказывается соединенным с накопительным резервуаром 410 для текучей среды (выполняет функцию хранилища для хранения текучей среды, используемой для восполнения запаса хода летательных аппаратов), установленным в корпусе заправочной станции 400 и заполненном текучей средой под давлением, с помощью подающего трубопровода 420, установленного в корпусе заправочной станции 400. Следует отметить, что при стыковке летательного аппарата 500-1 по фиг. 2 с заправочной станцией 400 используется специальный переходник 600, выполненный на конце подающего трубопровода 420, противоположном другому концу подающего трубопровода 420, используемому для соединения подающего трубопровода 420 с накопительным резервуаром 410, и сообщающийся посредством текучей среды с подающим трубопроводом 420, причем указанный переходник 600 выполнен с обеспечением возможности пристыковки сопла 200 к заправочной станции 400 для осуществления сообщения посредством текучей среды между пристыкованным соплом 420 и подающим трубопроводом 420, что позволяет направлять текучую среду под давлением из накопительного резервуара 410 в емкость 300. Другими словами, в результате стыковки летательного аппарата 500-1 по фиг. 2 с заправочной станцией 400 подающий трубопровод 420 обеспечивает возможность сообщения посредством текучей среды между накопительным резервуаром 410 и центральным соплом 200, которое в свою очередь сообщается посредством текучей среды с емкостью 300, то есть подающий трубопровод 420 по сути обеспечивает возможность сообщения посредством текучей среды между накопительным резервуаром 410 и емкостью 300. Таким образом, подающий трубопровод 420 в заправочной станции 400 выполняет функцию одного из средств подачи текучей среды, выполненного с возможностью разъемного подключения к корпусу 100 с обеспечением возможности подачи текучей среды из накопительного резервуара 410 к одному из сопел 200 (в частности, к центральному соплу 200) для заполнения емкости 300 текучей средой под давлением.
Согласно одному из вариантов реализации настоящего изобретения при стыковке летательного аппарата 500-1 по фиг. 2 с заправочной станцией 400 подающий трубопровод 420 может быть соединен по меньшей мере с одним или каждым из сопел 200 с обеспечением возможности сообщения посредством текучей среды между накопительным резервуаром 410 и указанным соплом 200. Другими словами, в данном варианте реализации настоящего изобретения подающий трубопровод 420 может сообщаться посредством текучей среды только с одним из сопел 200, только с двумя из сопел 200 или со всеми тремя соплами 200 с обеспечением возможности подачи текучей среды из накопительного резервуара 410 в емкость 300.
В одном из вариантов реализации настоящего изобретения стыковка летательного аппарата 500-1 по фиг. 2, подлетевшего к заправочной станции 400, с заправочной станцией 400 может быть осуществлена вручную оператором заправочной станции 400, при этом указанный оператор заправочной станции 400 может также вручную запустить процесс подачи текучей среды из накопительного резервуара 410 в одной или более изолированных камер корпуса 100, по завершению емкость 300 может быть полностью или частично заполнена текучей средой под давлением. В одной из разновидностей данного варианта реализации настоящего изобретения после осуществления ручной стыковки летательного аппарата 500-1 по фиг. 2 с заправочной станцией 400 модуль 110 управления может перехватить управление заправочной станцией 400 с обеспечением возможности подачи текучей среды из накопительного резервуара 410 в емкость 300 в автоматическом режиме под управлением модуля ПО управления, управляющего работой летательного аппарата 500-1 по фиг. 2 и временно управляющего работой заправочной станции 400. В другой разновидности данного варианта реализации настоящего изобретения после осуществления ручной стыковки летательного аппарата 500-1 по фиг. 2 с заправочной станцией 400 управляющее устройство заправочной станции 400 может перехватить управление летательным аппаратом 500-1 по фиг. 2 с обеспечением возможности подачи текучей среды из накопительного резервуара 410 в емкость 300 в автоматическом режиме под управлением управляющего устройства заправочной станции 400, управляющего работой заправочной станции 400 и временно управляющего работой летательного аппарата 500-1 по фиг. 2.
В другом варианте реализации настоящего изобретения стыковка летательного аппарата 500-1 по фиг. 2, подлетевшего к заправочной станции 400, с заправочной станцией 400 может быть осуществлена в полуавтоматическом режиме под управлением модуля 110 управления или управляющего устройства заправочной станции 400, которое может перехватить управление подлетевшим летательным аппаратом 500-1 по фиг. 2. В частности, в данном варианте реализации настоящего изобретения при подлете летательного аппарата 500-1 по фиг. 2 к заправочной станции 400 модуль 110 управления или управляющее устройство заправочной станции 400 обеспечивает возможность стыковки указанного летательного аппарата 500-1 по фиг. 2 с заправочной станцией 400 в автоматическом режиме, при этом после завершения указанного процесса стыковки под управлением модуля 110 управления или управлением управляющего устройства заправочной станции 400 оператор вручную приводит в действие вспомогательные зажимы или фиксаторы (не показаны) для обеспечения жесткого соединения между летательным аппаратом 500-1 по фиг. 2 и заправочной станцией 400. В одной из разновидностей данного варианта реализации настоящего изобретения после осуществления полуавтоматической стыковки летательного аппарата 500-1 по фиг. 2 с заправочной станцией 400 модуль ПО управления может перехватить управление заправочной станцией 400 с обеспечением возможности подачи текучей среды из накопительного резервуара 410 в емкость 300 в автоматическом режиме под управлением модуля 110 управления, управляющего работой летательного аппарата 500-1 по фиг. 2 и временно управляющего работой заправочной станции 400. В другой разновидности данного варианта реализации настоящего изобретения после осуществления полуавтоматической стыковки летательного аппарата 500-1 по фиг. 2 с заправочной станцией 400 управляющее устройство заправочной станции 400 может перехватить управление летательным аппаратом 500-1 по фиг. 2 с обеспечением возможности подачи текучей среды из накопительного резервуара 410 в емкость 300 в автоматическом режиме под управлением управляющего устройства заправочной станции 400, управляющего работой заправочной станции 400 и временно управляющего работой летательного аппарата 500-1 по фиг. 2. Еще в одной разновидности данного варианта реализации настоящего изобретения после осуществления полуавтоматической стыковки летательного аппарата 500-1 по фиг. 2 с заправочной станцией 400 оператор заправочной станции 400 может вручную запустить (например, путем нажатия на кнопку запуска на корпусе заправочной станции 400) и самостоятельно контролировать (например, с помощью индикаторов на корпусе заправочной станции 400) процесс подачи текучей среды из накопительного резервуара 410 в емкость 300.
Еще в одном варианте реализации настоящего изобретения стыковка летательного аппарата 500-1 по фиг. 2, подлетевшего к заправочной станции 400, с заправочной станцией 400 может быть осуществлена в автоматическом режиме под управлением модуля 110 управления или управляющего устройства заправочной станции 400, которое может перехватить управление подлетевшим летательным аппаратом 500-1 по фиг. 2. В частности, в данном варианте реализации настоящего изобретения при подлете летательного аппарата 500-1 по фиг. 2 к заправочной станции 400 модуль 110 управления или управляющее устройство заправочной станции 400 обеспечивает возможность жесткой стыковки указанного летательного аппарата 500-1 по фиг. 2 с заправочной станцией 400 полностью в автоматическом режиме. В одной из разновидностей данного варианта реализации настоящего изобретения после осуществления автоматической стыковки летательного аппарата 500-1 по фиг. 2 с заправочной станцией 400 модуль 110 управления может перехватить управление заправочной станцией 400 с обеспечением возможности подачи текучей среды из накопительного резервуара 410 в емкость 300 в автоматическом режиме под управлением модуля 110 управления, управляющего работой летательного аппарата 500-1 по фиг. 2 и временно управляющего работой заправочной станции 400. В другой разновидности данного варианта реализации настоящего изобретения после осуществления автоматической стыковки летательного аппарата 500-1 по фиг. 2 с заправочной станцией 400 управляющее устройство заправочной станции 400 может перехватить управление летательным аппаратом 500-1 по фиг. 2 с обеспечением возможности подачи текучей среды из накопительного резервуара 410 в емкость 300 в автоматическом режиме под управлением управляющего устройства заправочной станции 400, управляющего работой заправочной станции 400 и временно управляющего работой летательного аппарата 500-1 по фиг. 2. Еще в одной разновидности данного варианта реализации настоящего изобретения после осуществления автоматической стыковки летательного аппарата 500-1 по фиг. 2 с заправочной станцией 400 оператор заправочной станции 400 может вручную запустить (например, путем нажатия на кнопку запуска на корпусе заправочной станции 400) и самостоятельно контролировать (например, с помощью индикаторов на корпусе заправочной станции 400) процесс подачи текучей среды из накопительного резервуара 410 в емкость 300.
В ином варианте реализации настоящего изобретения средства подачи текучей среды, используемые для подачи текучей среды под давлением в емкость 300, установленную внутри корпуса 100 в летательном аппарате 500-1 по фиг. 2, могут дополнительно содержать компрессор (не показан), соединенный внутри корпуса заправочной станции 400 с подающим трубопроводом 420 или установленный в разрыве подающего трубопровода 420 и выполненный с возможностью забора текучей среды из накопительного резервуара 410.
В некотором ином варианте реализации настоящего изобретения средства подачи текучей среды, используемые для подачи текучей среды под давлением в емкость 300, установленную внутри корпуса 100 в летательном аппарате 500-1 по фиг. 2, могут дополнительно содержать компрессор (не показан), соединенный внутри корпуса заправочной станции 400 с подающим трубопроводом 420 и выполненный с возможностью забора текучей среды из внешней среды (например, из водоема, колонки, бака с текучей средой или т.п. хранилища с текучей средой за пределами корпуса заправочной станции 400).
В некотором другом варианте реализации настоящего изобретения средства подачи текучей среды, используемые для подачи текучей среды под давлением в емкость 300, установленную внутри корпуса 100 в летательном аппарате 500-1 по фиг. 2, могут представлять собой компрессор (не показан), установленный внутри корпуса заправочной станции 400 таким образом, что он соединен с накопительным резервуаром 410 и выполнен с возможностью разъемного подключения к одному или более из сопел 200 с обеспечением возможности забора текучей среды из накопительного резервуара 410 для подачи забранной текучей среды в емкость 300 с использованием по меньшей мере одного или каждого из сопел 200. В одной из разновидностей данного варианта реализации настоящего изобретения компрессор (не показан), установленный внутри корпуса заправочной станции 400 и выполняющий функцию средств подачи текучей среды для подачи текучей среды из накопительного резервуара 410 в емкость 300, может быть дополнительно выполнен с возможностью изменения давления текучей среды, забранной из накопительного резервуара 410 и подаваемой в емкость 300 посредством одного или более из сопел 200.
В различных вариантах реализации настоящего изобретения летательный аппарат 500-1 по фиг. 2 может быть дополнительно снабжен парашютной системой посадки (не показана), активируемой или приводимой в действие при достижении остаточным объемом текучей среды в емкости 300 предельно допустимого (критического) значения или при существенном исчерпании текучей среды в емкости 300, так что летательный аппарат 500-1 по фиг. 2 может долететь до заправочной станции 400 с использованием парашютной системы посадки (не показана), которая может быть приведена в действие с помощью модуля 110 управления.
В различных иных вариантах реализации настоящего изобретения летательный аппарат 500-1 по фиг. 2 может быть дополнительно снабжен одним или более воздушными движителями (не показаны), приводимыми в действие при достижении остаточным объемом текучей среды в емкости 300 предельно допустимого (критического) значения или при существенном исчерпании текучей среды в емкости 300, так что летательный аппарат 500-1 по фиг. 2 может долететь до заправочной станции 400 с использованием по меньшей мере одного из указанных дополнительных движителей (не показаны), который может быть приведен в действие с помощью модуля 110 управления.
В некоторых вариантах реализации настоящего изобретения емкость 300 в летательном аппарате 500-1 по фиг. 2 может быть заполнена текучей средой за один раз (т.е. при однократной притыковке летательного аппарата 500-1 по фиг. 2 к заправочной станции 400) или за несколько раз (т.е. при многократной притыковке летательного аппарата 500-1 по фиг. 2 к заправочной станции 400), например для получения в емкости 300 смеси текучих сред с разной плотностью.
В некоторых иных вариантах реализации настоящего изобретения вместо летательного аппарата 500-1 по фиг. 2 может быть использован летательный аппарат 500-1 по фиг. 1, который по сути является одной из возможных альтернатив летательного аппарата по фиг. 2, при этом летательных аппарат 500-1 по фиг. 1 может быть снабжен двумя и более емкостями 200, которые могут быть установлены внутри корпуса 100 и/или снаружи корпуса 100. В таких вариантах реализации настоящего изобретения при однократной притыковке летательного аппарата 500-1 по фиг. 1 к заправочной станции 400 текучей средой под давлением может быть заполнена по меньшей мере одна или каждая из емкостей 300, сообщающаяся посредством текучей среды с одним из сопел 200, использованных для осуществления указанной стыковки. Таким образом, в таких вариантах реализации настоящего изобретения для заправки текучей средой под давлением сразу всех емкостей 300 при однократной пристыковке летательного аппарата 500-1 по фиг. 1 к заправочной станции 400 с использованием конкретного или любого одного из сопел 200 в корпусе 100 должна быть предусмотрена система распределительных трубок, управляемых клапанов и по меньшей мере одно распределительное устройство, находящееся под управлением модуля ПО управления, для последовательной или по существу одновременной подачи текучей среды под давлением, попадающей из накопительного резервуара 420 в указанное сопло 200, по всем емкостям 300, входящим в состав летательного аппарата 500-1 по фиг. 1. В одной из разновидностей таких вариантов реализации настоящего изобретения для заполнения всех емкостей 300 летательный аппарат 500-1 по фиг. 1 может последовательно пристыковываться к заправочной станции 400 каждый раз с использованием того сопла 200, которое сообщается посредством текучей среды с той емкостью 300, которая должна быть заполнена текучей средой под давлением. Еще в одной разновидности таких вариантов реализации настоящего изобретения средства подачи текучей среды могут дополнительно содержать роботизированный захват (не показан), выполненный с возможностью извлечения по меньшей мере одной из емкостей 300 из корпуса 100 или возможностью отсоединения указанной по меньшей мере одной емкости 300 от корпуса 100. В другой разновидности таких вариантов реализации настоящего изобретения средства подачи текучей среды могут дополнительно содержать роботизированный захват (не показан), выполненный с возможностью демонтажа по меньшей мере одной из емкостей 300 с корпуса 100 или возможностью отсоединения указанной по меньшей мере одной емкости 300 от корпуса 100 с его внешней стороны.
Четвертый вариант реализации заправочной станции
Заправочная станция согласно еще одному аспекту реализации настоящего изобретения для заправки летательных аппаратов, описанных в данном документе, может представлять собой специальную заправочную установку для заправки текучей средой летательных аппаратов, снабженную приемной камерой (не показана), выполненной с возможностью ручного, полуавтоматического или автоматического помещения в нее по меньшей мере одного из одного или более летательных аппаратов 500-1, показанных на фиг. 1, одного или более летательных аппаратов 500-1, показанных на фиг. 2, одного или более летательных аппаратов 500-2, показанных на фиг. 3, и/или одного или более летательных аппаратов 500-3, показанных на фиг. 4, и дополнительно выполненной с возможностью закачивания или подачи в нее под давлением текучей среды, используемой для заправки указанных летательных аппаратов. Таким образом, текучая среда под давлением, закаченная или поданная в приемную камеру (не показана), в которой находятся подлежащие заправке летательные аппараты, может восстанавливать или восполнять (полностью или по меньшей мере частично) запас хода указанных летательных аппаратов в результате поступления этой текучей среды в требуемом объеме через управляемые клапаны или заправочные клапаны во вместилища таких летательных аппаратов, используемые для заполнения их рабочей текучей средой, управляемый выпуск которой из указанных вместилищ обеспечивает возможность перемещения таких летательных аппаратов по воздуху или возможность полета таких летательных аппаратов. В частности, в случае заправки одного или более летательных аппаратов 500-1, помещенных в приемную камеру заправочной станции, текучая среда, поданная под высоким давлением в указанную приемную камеру после помещения в нее указанных летательных аппаратов 500-1, может поступать через один или более управляемых клапанов или через один или более заправочных клапанов, открытых под управлением модуля 110 управления в каждом из указанных летательных аппаратов 500-1, в каждую из емкостей 300, заполняемых текучей средой для восстановления или восполнения (полного или по меньшей мере частичного) запаса хода указанных летательных аппаратов 500-1. Кроме того, в случае заправки одного или более летательных аппаратов 500-2, помещенных в приемную камеру заправочной станции, текучая среда, поданная под высоким давлением в указанную приемную камеру после помещения в нее указанных летательных аппаратов 500-2, может поступать через один или более управляемых клапанов или через один или более заправочных клапанов, открытых под управлением модуля управления в каждом из указанных летательных аппаратов 500-2, в каждый из надувных корпусов 100, заполняемых текучей средой для восстановления или восполнения (полного или по меньшей мере частичного) запаса хода указанных летательных аппаратов 500-2. Кроме того, в случае заправки одного или более летательных аппаратов 500-3, помещенных в приемную камеру заправочной станции, текучая среда, поданная под высоким давлением в указанную приемную камеру после помещения в нее указанных летательных аппаратов 500-3, может поступать через один или более управляемых клапанов или через один или более заправочных клапанов, открытых под управлением модуля управления в каждом из указанных летательных аппаратов 500-3, в каждую из изолированных камер корпуса, заполняемых текучей средой для восстановления или восполнения (полного или по меньшей мере частичного) запаса хода указанных летательных аппаратов 500-3.
В одном из вариантов реализации настоящего изобретения, приемная камера может быть выполнена в виде трубы или удлиненного вместилища.
Варианты реализации способов перемещения летательных аппаратов по воздуху
На фиг. 8 показана блок-схема, иллюстрирующая основные операции одного из иллюстративных вариантов реализации способа 700 перемещения летательного аппарата 500-1 согласно первому аспекту настоящему изобретению по воздуху, при этом способ 700, показанный на фиг. 8, включает две (2) основные операции или два (2) основных этапа 710, 720. На этапе 710 в способе 700 определяют, посредством навигационного модуля 130, пространственные координаты летательного аппарата 500-1 в реальном времени. На этапе 720 регулируют, посредством модуля ПО управления, выпуск текучей среды по меньшей мере из одной из емкостей 300, которыми снабжен корпус 100 в летательном аппарате 500-1, на основании указанных определенных пространственных координат для управления перемещением летательного аппарата 500-1 по воздуху.
На фиг. 9 показана блок-схема, иллюстрирующая основные операции одного из иллюстративных вариантов реализации способа 800 перемещения летательного аппарата 500-2 согласно второму аспекту настоящему изобретению по воздуху, при этом способ 800, показанный на фиг. 9, включает две (2) основные операции или два (2) основных этапа 810, 820. На этапе 810 в способе 800 определяют, посредством навигационного модуля летательного аппарата 500-2, пространственные координаты летательного аппарата 500-2 в реальном времени. На этапе 820 в способе 800 регулируют, посредством модуля управления летательного аппарата 500-2, выпуск текучей среды из надувного корпуса 100 на основании указанных определенных пространственных координат для управления перемещением летательного аппарата 500-2 по воздуху.
На фиг. 10 показана блок-схема, иллюстрирующая основные операции одного из иллюстративных вариантов реализации способа 900 перемещения летательного аппарата 500-3 согласно третьему аспекту настоящему изобретению по воздуху, при этом способ 900, показанный на фиг. 10, включает две (2) основные операции или два (2) основных этапа 910, 920. На этапе 910 в способе 900 определяют, посредством навигационного модуля летательного аппарата 500-3, пространственные координаты летательного аппарата 500-3 в реальном времени. На этапе 920 в способе 900 регулируют, посредством модуля управления летательного аппарата 500-3, выпуск текучей среды по меньшей мере из одной из полостей корпуса 100 на основании указанных определенных пространственных координат для управления перемещением летательного аппарата 500-3 по воздуху.
Варианты реализации способов заправки летательных аппаратов
На фиг. 11 показана блок-схема, иллюстрирующая основные операции одного из иллюстративных вариантов реализации способа 1000 заправки летательного аппарата 500-1 согласно первому аспекту настоящего изобретения текучей средой под давлением с использованием заправочной станции 400 согласно шестому аспекту настоящего, при этом способ 1000, показанный на фиг. 11, включает две (2) основные операции или два (2) основных этапа 1010, 1020. На этапе 1010 в способе 1000 разъемно подключают по меньшей мере одно средство подачи текучей среды заправочной станции 400 по меньшей мере к одной из емкостей 300, которыми снабжен корпус 100 в летательном аппарате 500-1. На этапе 1020 в способе 1000 заполняют, посредством по меньшей мере одного подключенного средства подачи текучей среды заправочной станции 400, текучей средой под давлением по меньшей мере в одну емкость 300, к которой подключено средство подачи текучей среды заправочной станции 400 в результате выполнения этапа 1010.
На фиг. 12 показана блок-схема, иллюстрирующая основные операции одного из иллюстративных вариантов реализации способа 1100 заправки летательного аппарата 500-2 согласно второму аспекту настоящего изобретения текучей средой под давлением с использованием заправочной станции 400 согласно четвертому аспекту настоящего, при этом способ 1100, показанный на фиг. 12, включает две (2) основные операции или два (2) основных этапа 1 ПО, 1120. На этапе 1110 в способе 1200 разъемно подключают по меньшей мере одно средство подачи текучей среды заправочной станции 400 к надувному корпусу 100, который входит в состав летательного аппарата 500-2. На этапе 1020 в способе 1000 заполняют, посредством по меньшей мере одного подключенного средства подачи текучей среды заправочной станции 400, текучей средой под давлением внутреннее пространство надувного корпуса 100, входящего в состав летательного аппарата 500-2.
На фиг. 13 показана блок-схема, иллюстрирующая основные операции одного из иллюстративных вариантов реализации способа 1200 заправки летательного аппарата 500-3 согласно третьему аспекту настоящего изобретения текучей средой под давлением с использованием заправочной станции 400 согласно пятому аспекту настоящего, при этом способ 1200, показанный на фиг. 13, включает две (2) основные операции или два (2) основных этапа 1210,1220. На этапе 1210 в способе 1200 разъемно подключают по меньшей мере одно средство подачи текучей среды заправочной станции 400 по меньшей мере к одной из изолированных полостей корпуса летательного аппарата 500-3. На этапе 1220 в способе 1200 заполняют, посредством по меньшей мере одного подключенного средства подачи текучей среды заправочной станции 400, текучей средой под давлением по меньшей мере одну изолированную полость корпуса летательного аппарата 500-3, к которой подключено средство подачи текучей среды заправочной станции 400 в результате выполнения этапа 1210.
Представленные иллюстративные варианты осуществления настоящего изобретения, примеры и описание служат лишь для обеспечения понимания сущности заявляемого изобретения и не являются ограничивающими. Иные возможные варианты осуществления настоящего изобретения, либо модификации или улучшения вышеописанных вариантов реализации настоящего изобретения будут ясны специалисту в данной области техники из представленного выше описания. Объем настоящего изобретения ограничен лишь прилагаемой формулой изобретения.

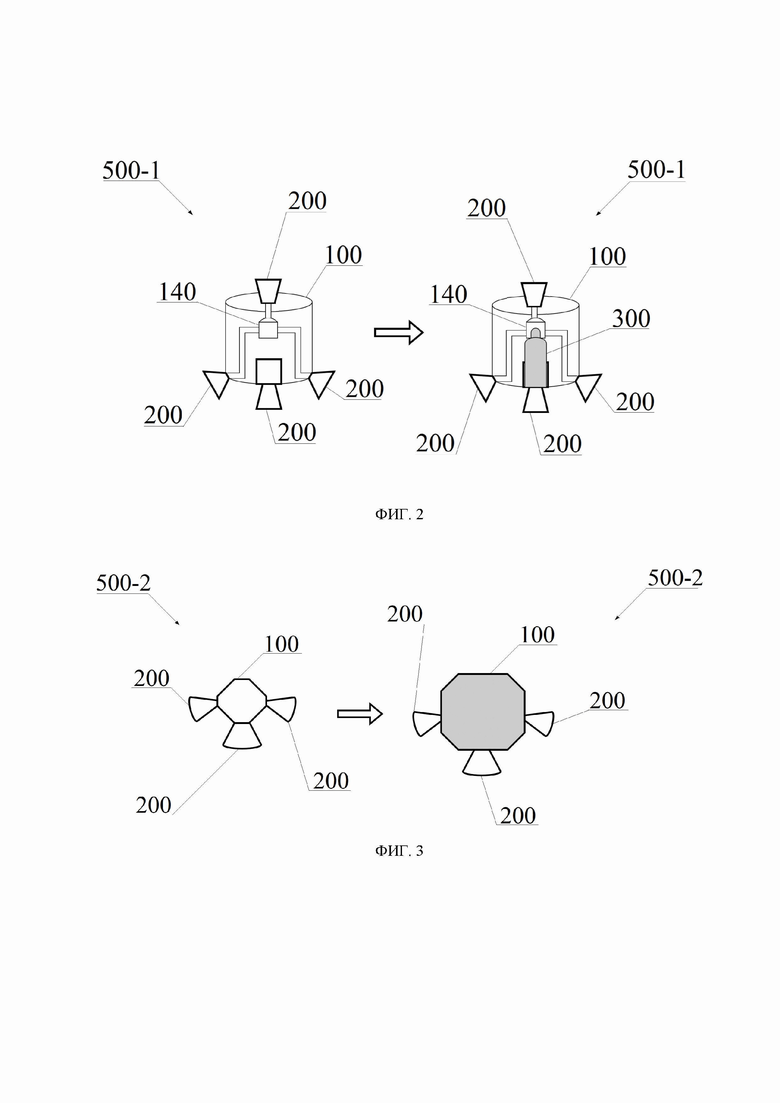

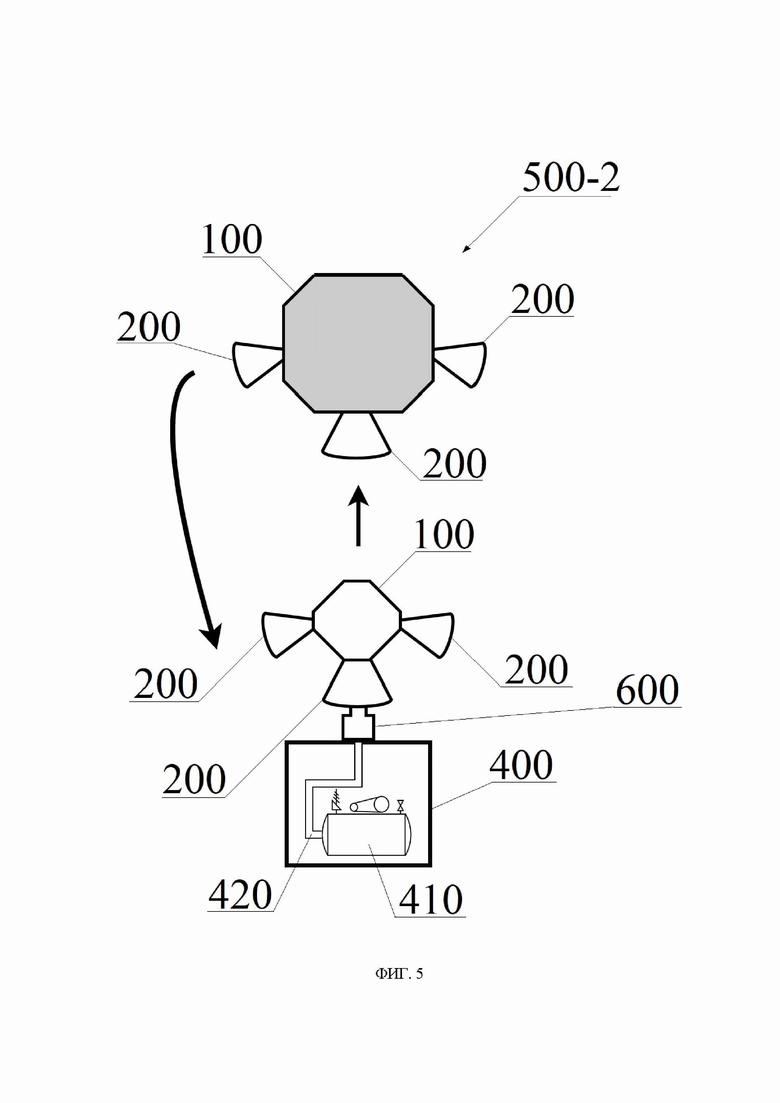



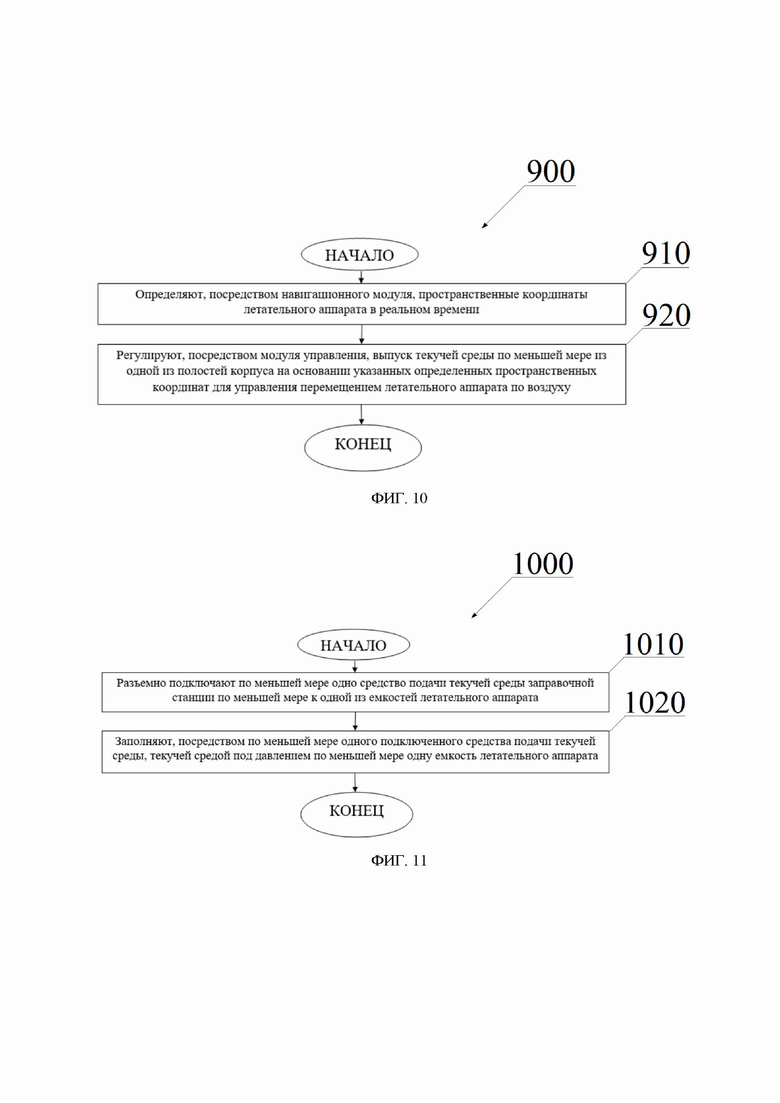

Изобретение относится к авиационной технике. Летательный аппарат (500-1) содержит корпус (100) и модуль управления (110). Корпус (100) снабжен одной или более емкостями (300), выполненными с возможностью заполнения их текучей средой под давлением. По меньшей мере одна из указанных емкостей (300) имеет два или более выпускных отверстий для выпуска текучей среды. Каждое отверстие снабжено управляемым клапаном. Модуль управления соединен с управляемыми клапанами с обеспечением возможности управления их состоянием для регулирования выпуска текучей среды из указанной по меньшей мере одной емкости (300) с обеспечением возможности управления перемещением летательного аппарата по воздуху. Достигается снижение веса и снижение энергоемкости летательного аппарата. 13 н. и 38 з.п. ф-лы, 13 ил.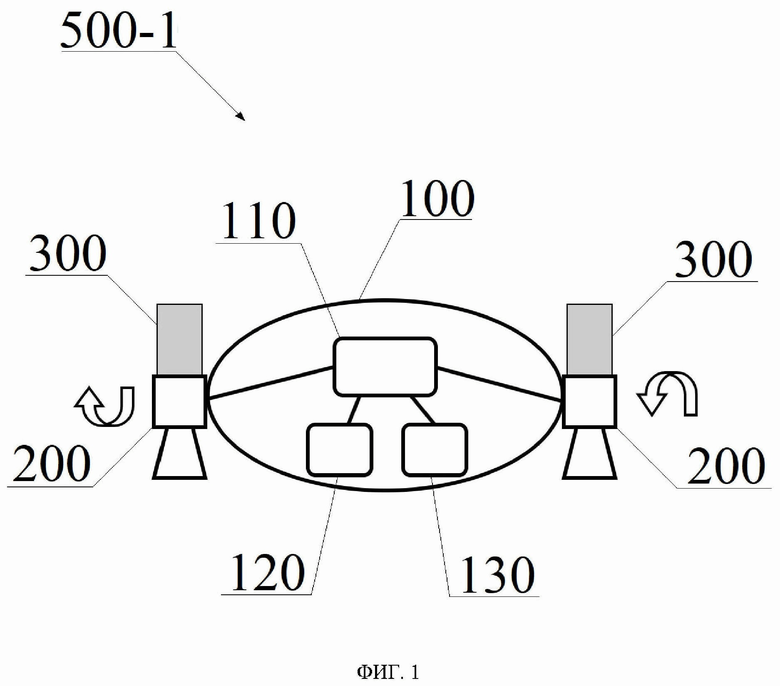
1. Летательный аппарат, содержащий:
корпус, снабженный одной или более емкостями, выполненными с возможностью заполнения их текучей средой под давлением, и
по меньшей мере одна из указанных емкостей имеет два или более выпускных отверстий для выпуска текучей среды, которые снабжены каждое управляемым клапаном,
модуль управления, соединенный с управляемыми клапанами с обеспечением возможности управления их состоянием для регулирования выпуска текучей среды из указанной по меньшей мере одной емкости с обеспечением возможности управления перемещением летательного аппарата по воздуху.
2. Летательный аппарат по п. 1, дополнительно содержащий навигационный модуль, соединенный с корпусом и выполненный с возможностью определения пространственных координат летательного аппарата в реальном времени, при этом модуль управления дополнительно соединен с навигационным модулем с возможностью приема определенных пространственных координат и дополнительно выполнен с обеспечением возможности регулируемого выпуска текучей среды по меньшей мере из одной из емкостей корпуса в зависимости от указанных принятых пространственных координат.
3. Летательный аппарат по п. 1, в котором по меньшей мере одна из указанных емкостей представляет собой пневматический баллон.
4. Летательный аппарат по п. 1, в котором по меньшей мере одна из указанных емкостей выполнена с возможностью её повторного заполнения текучей средой под давлением.
5. Летательный аппарат по п. 1, в котором по меньшей мере одна из указанных емкостей выполнена с возможностью заполнения смесью по меньшей мере из двух газообразных сред разной плотности.
6. Летательный аппарат по п. 1, в котором по меньшей мере одна из указанных емкостей выполнена с возможностью заполнения по меньшей мере одной газообразной средой из группы газообразных сред, содержащей: гелий, водород, аммиак, пары воды, неон, ацетилен, окись углерода, азот и этилен.
7. Летательный аппарат по п. 1, в котором указанные выпускные отверстия выполнены в указанной по меньшей мере одной емкости на заданном расстоянии друг от друга.
8. Летательный аппарат по п. 1, в котором указанные выпускные отверстия выполнены на противоположных сторонах указанной по меньшей мере одной емкости.
9. Летательный аппарат по п. 1, в котором указанные выпускные отверстия выполнены с разных сторон указанной по меньшей мере одной емкости.
10. Летательный аппарат по п. 1, в котором по меньшей мере одна из указанных емкостей сообщается посредством текучей среды с двумя или более соплами для выпуска текучей среды, которые снабжены каждое управляемым клапаном, а модуль управления дополнительно соединен с управляемыми клапанами сопел с обеспечением возможности управления их работой для регулирования выпуска текучей среды из емкостей.
11. Летательный аппарат по п. 10, в котором указанные сопла установлены на указанной по меньшей мере одной емкости на заданном расстоянии друг от друга.
12. Летательный аппарат по п. 10, в котором указанные сопла установлены на противоположных сторонах указанной по меньшей мере одной емкости.
13. Летательный аппарат по п. 10, в котором указанные сопла выполнены с разных сторон указанной по меньшей мере одной емкости.
14. Летательный аппарат по п. 1, в котором указанная по меньшей мере одна из указанных емкостей установлена на корпусе с возможностью изменения ее пространственного положения или ее пространственной ориентации под управлением модуля управления.
15. Летательный аппарат по п. 1, в котором указанная по меньшей мере одна емкость выполнена с возможностью разъемного соединения с корпусом летательного аппарата.
16. Летательный аппарат по п. 1, в котором по меньшей мере одна из указанных емкостей дополнительно снабжена по меньшей мере одним заправочным клапаном, выполненным с обеспечением возможности заполнения текучей средой под давлением указанной по меньшей мере одной емкости.
17. Летательный аппарат по п. 16, в котором указанный заправочный клапан выполнен в виде управляемого клапана, связанного с модулем управления, обеспечивающим возможность изменения состояния указанного управляемого клапана.
18. Летательный аппарат по п. 1, в котором по меньшей мере одна из указанных емкостей содержит по меньшей мере одно выпускное отверстие, снабженное управляемым клапаном, связанным с модулем управления, обеспечивающим возможность изменения состояния указанного управляемого клапана, и выполненным с обеспечением возможности заполнения текучей средой под давлением указанной по меньшей мере одной емкости и возможности выпуска текучей среды из указанной по меньшей мере одной емкости.
19. Летательный аппарат по п. 1, в котором по меньшей мере одна из указанных емкостей снабжена датчиком давления, выполненным с возможностью регистрации давления текучей среды в указанной по меньшей мере одной емкости, а модуль управления дополнительно соединен с датчиками давления емкостей с обеспечением возможности регулирования выпуска текучей среды по меньшей мере из одной емкости из указанных емкостей в зависимости от показаний датчиков давления.
20. Летательный аппарат по п. 1, дополнительно содержащий модуль обнаружения препятствий, выполненный с возможностью обнаружения одного или более препятствий в реальном времени при перемещении летательного аппарата по воздуху, при этом модуль управления дополнительно соединен с модулем обнаружения препятствий с обеспечением возможности приема данных об обнаруженных препятствиях и возможности регулирования выпуска текучей среды по меньшей мере из одной из указанных емкостей в зависимости от указанных обнаруженных препятствий.
21. Летательный аппарат по п. 1, дополнительно содержащий модуль регистрации параметров полета, выполненный с возможностью получения одного или более параметров полета в реальном времени, при этом модуль управления дополнительно соединен с модулем регистрации параметров полета с обеспечением возможности приема зарегистрированных параметров полета и возможности регулирования выпуска текучей среды по меньшей мере из одной из указанных емкостей в зависимости от указанных принятых параметров полета.
22. Летательный аппарат по п. 1, в котором корпус дополнительно снабжен одним или более выпускными патрубками, сообщающимися каждый посредством текучей среды по меньшей мере с одной из указанных емкостей и снабженных каждый одним или более управляемыми клапанами, а модуль управления дополнительно соединен с управляемыми клапанами выпускных патрубков с обеспечением возможности регулирования выпуска текучей среды из указанных выпускных патрубков при перемещении летательного аппарата по воздуху.
23. Летательный аппарат по п. 22, в котором по меньшей мере один из указанных выпускных патрубков закреплен на корпусе посредством поворотного механизма, а модуль управления дополнительно соединен с поворотным механизмом с обеспечением возможности управления его работой для поворотного перемещения указанного по меньшей мере одного выпускного патрубка.
24. Летательный аппарат по п. 1, в котором корпус снабжен одним или более управляемыми источниками света, выполненными с обеспечением возможности изменения длины волны излучаемого света, а модуль управления дополнительно соединен с указанными источниками света с обеспечением возможности управления их работой для изменения длины волны излучения света по меньшей мере одного из указанных источников света.
25. Летательный аппарат по п. 1, в котором корпус снабжен одним или более дисплеями, а модуль управления дополнительно соединен с указанными дисплеями с обеспечением возможности управления их работой для отображения изображения по меньшей мере на одном из указанных дисплеев.
26. Летательный аппарат по п. 1, в котором корпус снабжен одной или более камерами, а модуль управления дополнительно соединен с указанными камерами с обеспечением возможности управления их работой для захвата изображения с использованием по меньшей мере одной из указанных камер.
27. Летательный аппарат, содержащий:
надувной корпус, выполненный с возможностью заполнения текучей средой под давлением, и
модуль управления, выполненный с обеспечением возможности регулируемого выпуска текучей среды из надувного корпуса для управления перемещением летательного аппарата по воздуху.
28. Летательный аппарат по п. 27, дополнительно содержащий навигационный модуль, соединенный с корпусом и выполненный с возможностью определения пространственных координат летательного аппарата в реальном времени, при этом модуль управления дополнительно соединен с навигационным модулем с возможностью приема определенных пространственных координат и дополнительно выполнен с обеспечением возможности регулируемого выпуска текучей среды из надувного корпуса в зависимости от указанных принятых пространственных координат.
29. Летательный аппарат по п. 28, в котором надувной корпус имеет два или более выпускных отверстий для выпуска текучей среды, которые снабжены каждое управляемым клапаном, а модуль управления дополнительно соединен с управляемыми клапанами с обеспечением возможности управления их работой для регулирования выпуска текучей среды из надувного корпуса.
30. Летательный аппарат по п. 28, в котором надувной корпус содержит два или более сопел для выпуска текучей среды, которые снабжены каждое управляемым клапаном, а модуль управления дополнительно соединен с управляемыми клапанами сопел с обеспечением возможности управления их работой для регулирования выпуска текучей среды из надувного корпуса.
31. Летательный аппарат, содержащий:
корпус, содержащий одну или более изолированных полостей, выполненных с возможностью заполнения текучей средой под давлением, и
модуль управления, выполненный с обеспечением возможности регулируемого выпуска текучей среды по меньшей мере из одной из указанных полостей для управления перемещением летательного аппарата по воздуху.
32. Летательный аппарат по п. 31, дополнительно содержащий навигационный модуль, соединенный с корпусом и выполненный с возможностью определения пространственных координат летательного аппарата в реальном времени, при этом модуль управления дополнительно соединен с навигационным модулем с возможностью приема определенных пространственных координат и дополнительно выполнен с обеспечением возможности регулируемого выпуска текучей среды по меньшей мере из одной из полостей корпуса в зависимости от указанных принятых пространственных координат.
33. Летательный аппарат по п. 32, в котором надувной корпус содержит два или более выпускных патрубков для выпуска текучей среды, которые соединены каждый посредством текучей среды по меньшей мере с одной из указанных изолированных полостей и которые снабжены каждый по меньшей мере одним управляемым клапаном, а модуль управления дополнительно соединен с управляемыми клапанами патрубков с обеспечением возможности управления их работой для регулирования выпуска текучей среды из изолированных полостей корпуса.
34. Заправочная станция для заправки летательного аппарата по п. 1, содержащая по меньшей мере одно средство подачи текучей среды, выполненное с возможностью разъемного подключения по меньшей мере к одной из емкостей летательного аппарата посредством двух или более выпускных отверстий для выпуска текучей среды, которые снабжены каждое управляемым клапаном, с обеспечением возможности заполнения текучей средой под давлением указанной по меньшей мере одной емкости летательного аппарата.
35. Заправочная станция по п. 34, в которой средство подачи текучей среды представляет собой компрессор, выполненный с возможностью забора текучей среды из хранилища для хранения текучей среды или возможностью забора текучей среды из внешней среды.
36. Заправочная станция по п. 34, в которой средство подачи текущей среды дополнительно выполнено с возможностью изменения давления забранной текучей среды.
37. Заправочная станция по п. 34, в которой средство подачи текучей среды дополнительно выполнено с возможностью извлечения указанной по меньшей мере одной емкости из корпуса летательного аппарата или возможностью отсоединения указанной по меньшей мере одной емкости от корпуса летательного аппарата.
38. Заправочная станция по п. 37, в которой средство подачи текучей среды дополнительно выполнено с возможностью установки указанной по меньшей мере одной извлеченной емкости обратно в корпус летательного аппарата или возможностью присоединения указанной по меньшей мере одной отсоединенной емкости обратно к корпусу летательного аппарата.
39. Заправочная станция для заправки летательного аппарата по п. 27, содержащая по меньшей мере одно средство подачи текучей среды, выполненное с возможностью разъемного подключения к надувному корпусу летательного аппарата с обеспечением возможности заполнения текучей средой под давлением внутреннего пространства надувного корпуса летательного аппарата.
40. Заправочная станция по п. 39, в которой средство подачи текучей среды представляет собой компрессор, выполненный с возможностью забора текучей среды из хранилища для хранения текучей среды или возможностью забора текучей среды из внешней среды.
41. Заправочная станция по п. 39, в которой средство подачи текущей среды дополнительно выполнено с возможностью изменения давления забранной текучей среды.
42. Заправочная станция для заправки летательного аппарата по п. 31, содержащая по меньшей мере одно средство подачи текучей среды, выполненное с возможностью разъемного подключения по меньшей мере к одной из изолированных полостей корпуса летательного аппарата с обеспечением возможности заполнения текучей средой под давлением указанной по меньшей мере одной изолированной полости корпуса летательного аппарата.
43. Заправочная станция по п. 42, в которой средство подачи текучей среды представляет собой компрессор, выполненный с возможностью забора текучей среды из хранилища для хранения текучей среды или возможностью забора текучей среды из внешней среды.
44. Заправочная станция по п. 42, в которой средство подачи текущей среды дополнительно выполнено с возможностью изменения давления забранной текучей среды.
45. Способ перемещения летательного аппарата по п. 1 по воздуху, согласно которому:
определяют, посредством навигационного модуля, пространственные координаты летательного аппарата в реальном времени, и
регулируют, посредством модуля управления, выпуск текучей среды по меньшей мере из одной из емкостей летательного аппарата посредством двух или более выпускных отверстий для выпуска текучей среды, которые снабжены каждое управляемым клапаном, на основании указанных определенных пространственных координат для управления перемещением летательного аппарата по воздуху.
46. Способ перемещения летательного аппарата по п. 27 по воздуху, согласно которому:
определяют, посредством навигационного модуля, пространственные координаты летательного аппарата в реальном времени, и
регулируют, посредством модуля управления, выпуск текучей среды из надувного корпуса на основании указанных определенных пространственных координат для управления перемещением летательного аппарата по воздуху.
47. Способ перемещения летательного аппарата по п. 31 по воздуху, согласно которому:
определяют, посредством навигационного модуля, пространственные координаты летательного аппарата в реальном времени, и
регулируют, посредством модуля управления, выпуск текучей среды по меньшей мере из одной из полостей корпуса на основании указанных определенных пространственных координат для управления перемещением летательного аппарата по воздуху.
48. Способ заправки летательного аппарата по п. 1 текучей средой под давлением с использованием заправочной станции по п. 34, согласно которому:
разъемно подключают по меньшей мере одно средство подачи текучей среды заправочной станции по меньшей мере к одной из емкостей летательного аппарата и
заполняют, посредством указанного по меньшей мере одного подключенного средства подачи текучей среды, текучей средой под давлением в указанную по меньшей мере одну емкость летательного аппарата.
49. Способ заправки летательного аппарата по п. 27 текучей средой под давлением с использованием заправочной станции по п. 39, согласно которому:
разъемно подключают по меньшей мере одно средство подачи текучей среды заправочной станции к надувному корпусу летательного аппарата и
заполняют, посредством указанного по меньшей мере одного подключенного средства подачи текучей среды, текучей средой под давлением внутреннее пространство надувного корпуса летательного аппарата.
50. Способ заправки летательного аппарата по п. 31 текучей средой под давлением с использованием заправочной станции по п. 42, согласно которому:
разъемно подключают по меньшей мере одно средство подачи текучей среды заправочной станции по меньшей мере к одной из изолированных полостей корпуса летательного аппарата и
заполняют, посредством по меньшей мере одного средства подачи текучей среды заправочной станции, текучей средой под давлением указанную по меньшей мере одну изолированную полость корпуса летательного аппарата.
51. Заправочная станция для заправки летательного аппарата по любому из пп. 1, 27 и 31, содержащая приемную камеру, выполненную с возможностью размещения в ней летательного аппарата по п. 1, летательного аппарата по п. 27 и/или летательного аппарата по п. 31 и дополнительно выполненную с возможностью подачи в нее текучей среды под давлением с обеспечением возможности по меньшей мере частичного восполнения запаса хода соответственно летательного аппарата по п. 1, летательного аппарата по п. 27 и/или летательного аппарата по п. 31.
| CN 205345322 U, 26.09.2016 | |||
| CN 107021235 U, 08.08.2017 | |||
| US 2022041299 A, 10.02.2022 | |||
| US 11453514 B2, 27.09.2022 | |||
| CN 108953994 A, 17.12.2018 | |||
| ЧЕРНИЛА ДЛЯ СТРУЙНОЙ ПЕЧАТИ И УСТРОЙСТВО ДЛЯ СТРУЙНОЙ ПЕЧАТИ | 2013 |
|
RU2588216C2 |
| WO 2018035861 A1, 01.03.2018 | |||
| CN 205872491 U, 11.07.2017 | |||
| US 2022262263 A1, 18.08.2022. | |||
