Устройство относится к железнодорожному транспорту и предназначено для автоматического расцепления вагонов непосредственно в роторе вагоноопрокидывателя (в/о). Несмотря на большое количество изобретений на устройства расцепления железнодорожных (ж/д) вагонов на пути надвига вагонов в ротор в/о, расцепка производится вручную рабочим расцепщиком. Расцепщик выполняет работу по расцепки вагонов в нутрии в/о, перемещается по площадке в/о от входа на выход и обратно, отцепляя поочередно то пустой вагон на выходе, то груженый на входе в/о. Машинист в/о, следящий за разгрузкой вагонов и управляющий толкателем, в момент расцепки вагонов находится по отношению к расцепщику с противоположной стороны вагона и расцепщика не видет. Таким образом расцепщик выполняет работу по расцепки вагонов внутри ротора в/о бесконтрольно в условиях повышенной опасности с точки зрения техники безопасности (ТБ) и неблагоприятных условиях окружающей среды (угольная пыль, сквозняки). Отсуствие реально работающих устройств расцепки на подачи вагонов в ротор в/о очевидно связано с тем, что авторы предлагаемых изобретений не учитывают в полной мере всех реальных состояний автосцепки на ж.д. вагонах в процессе их эксплуатации и возможных неисправностей: отсуствует или погнут расцепной рычаг, отсуствует или порвана цепочка, ее длина не соответствует норме, форма противовеса валика и его положение, заклинивание или выпадание валика замка, заклинивание самого замка, попадание грязи и снега внутрь корпуса автосцепки, образование льда, износ самих автосцепок. Простые механические устройства для автоматической расцепки не обеспечат надежной расцепки. Устройства с оптическим наведением и поиском узла расцепки, управляемые электронным вычислительным блоком, роботизированные устройства мало вероятно смогут оценить все возможные состояния автосцепки. Роботизированные устройства сложны по конструкции, дороги в эксплуатации. Для их обслуживания теребуетя высоко квалифицированный персонал. Для расцепки вагонов на в/о требуется два устройства. Расцепка происходит в двух точках в/о, на стыке ж.д. пути и ротора со стороны подачи груженых вагонов и на выходе порожнего вагона на стыке отводящего ж.д. пути и ротора в/о. (если робот-расцепщик не захочет бегать по обслуживаемой площадке с одного конца ротора на другой и обратно.)
Цель настоящего предлагаемого изобретения - простое и надежное устройство для расцепки ж.д. вагонов непосредственно в роторе в/о и исключить опасный ручной труд расцепщика вагонов. Предполагаемое изобретение основано на возможности автосцепок перемещаться по вертикали относительно друг друга двух смежных сцепок до полной расцепки. Это свойство автосцепки использовано в а, с, 1615002, авторы Н.И. Толстопятое, В.Е. Никитин и Л.И. Вознесенский «Устройство для автоматического расцепления движущихся вагонов». Использование данного изобретения на в/о потребует два таких устройства, т.к. одна расцепка вагонов находится со стороны подачи груженых вагонов в ротор, другая с стороны выхода порожних вагонов из ротора. Использование двух устройств ведет к дополнительным материальным затратам и обслуживания в процессе эксплуатации. Использование 2-х устройств потребует еще изменение привычной технологической схемы подачи вагонов, подачу с стороны груженых вагонов на вытягивание с стороны порожних вагонов, т.к. после расцепки груженого вагона перед в/о его надо завести в ротор в/о. Если сцепка не заблокирована в расцепленном состоянии (что на практике так и бывает), то дальнейшее его проталкивание в ротор в/о приведет к сцеплению вагонов.
На сайте (https://mashxxl.info/page/253193245162250181164091130124190093031184010007/)
Энциклопедия по машиностроению XXL. Оборудование…, Раздел 4. Машины и устройства специального назначения. Глава 17. Машины для разгрузки открытых вагонов.  1.
1.
Вагоноопрокидоатели.
В энциклопедии на стр. 391-393 приведено подробное описание работы и устройство в/о, рис. 210 - принят за прототип. На рис. 1 показаны основные конструктивные узлы, взятые из энциклопедии.
На рис. 1 схематично показан с торца вид в/о. 1 - ротор, представляет собой сварную металлоконструцию, опирающую на ролликоопоры, и в котором монтируются все узлы в/о. 2 - люлька, в которой устанавливается приемная рельсовая платформа - 3 (в дальнейшем платформа) на стойках с помощью шарнирно рычажного механизма. Основной недостаток в/о лежит в конструкции платформы, который не позволяет проводить расцепку непосредственно в роторе в/о. На рис. 2 схематично показано предлагаемое устройство платформы с возможностью автоматической расцепки вагонов непосредственно в роторе. Устройство представляет собой сборную конструкцию и состоит из двух частей - конструкций, неподвижной - 1 и подвижной - 3 Рис. 2. Неподвижная конструкция - 1 Рис. 2 устанавливается в люльку - 2 Рис. 1 в замен прежней платформы - 3 рис 1. Крепление конструкции - 1 аналогично креплению прежней платформы на шарнирно рычажном механизме - 4, Рис 1. Неподвижная конструкция - 1. Рис 2 имеет приваренные цилиндрические гнезда - 2, в которые устанавливается исполнительный механизм гидро (или пневмо) цилиндры - 4. На штоки - 5 цилиндров устанавливается подвижная конструкция - 3, которая и представляет собой приемную платформу. Количество рабочих цилиндров может быть 4 - 6 - 8, зависит от габаритных размеров ротора и его грузоподъемности.
Площадки - 6 Рис. 2 составная часть конструкции - 1 и представляют единое целое с ней, служат для размещения на них первых осей колес вагонов сцепленных с разгружаемым вагоном, т.к. длина ротора больше длины разгружаемого вагона, то следующий за разгружаемым вагоном вагон частично заходит в ротор. Площадки - 6 служат так же для согласования постановочных размеров разных вагонов, когда одним в/о разгружаются вагоны различной грузоподъемности, например вагоны грузоподъемностью 62 тн. и 93 тн. Согласование осуществляется за счет расстояния между осями первых колес сцепленных вагонов и длины перемещающейся площадки - 3 и размеров площадок - 6. Размеры L, S, d конструктивные размеры зависят от целей и назначения в/о и грузоподъемности вагонов. Расцепка и разгрузка вагонов на в/о с приемной площадкой Рис. 2 происходит следующим образм. В исходном состояние площадка - 3 находится в нижнем положение. С началом работы машинист в/о путем подачи рабочей среды в цилиндры поднимает площадку, совмещает головки рельсов подвижной площадки - 3 и площадки - 6 с рельсами ж/д пути. Затем с помощью электротолкателя с дистанционным управлением машинист заводит груженый вагон в ротор в/о и устанавливает разгружаемый вагон по центру площадки - 3, подает команду на сброс давления рабочей среды в цилиндрах. Рабочая среда под весом вагона вытесняется, площадка - 3 с вагоном плавно опускается и ложится на конструкцию - 1, происходит расцепка вагонов. Отцепленные груженые вагоны из ротора оттягиваются машинистом с помощью электротолкателя. Машинист приступает к разгрузке первого вагона в известном порядке (по рабочей инструкции). Примечание: ротор поворачивается вокруг своей горизонтальной оси на 170 -175 градусов. По окончанию разгрузки и зачистки вагонов ротор возвращается в исходное положение. Машинист включает подачу рабочей среды в цилиндры. Под давление рабочей среды площадка поднимается и разгруженный вагон занимает исходное положение. Один цикл расцепка-разгрузка есть, приступаем к следующему. Машинист подает в ротор второй груженый вагон, который сцепляется с пустым и проталкивает последний на выход из ротора. Груженый вагон устанавливается по центру площадки - 3. Машинист подает команду на сброс давления рабочей среды в цилиндрах. Площадка - 3 вместе с вагоном плавно опускается как в первом случае. Происходит расцепка разгружаемого вагона с порожним и следующим за ним гружеными вагонами. Порожний вагон «добровольно» скатывается по наклонному отводящему ж.д. пути или выталкивается с выхода в/о подвагонным пневматическим толкателем. Груженые вагоны оттягиваются как в первом случае. Машинист приступает к разгрузке второго вагона. По завершению разгрузки вагона ротор в/о занимает исходное положение, машинист подает команду на подачу рабочей среды в цилиндры, под давлением рабочей среды цилиндры поднимают площадку - 3, порожний вагон занимает исходное положение. Второй цикл расцепка-разгрузка закончился. Так цикл за циклом производится разгрузка всех ж./д. вагонов состава без участия расцепщика.
1. АС 1615002, авторы Н.И. Толстопятое, В.Е. Никитин и Л.И. Вознесенский «Устройство для автоматического расцепления движущихся вагонов».
2. Энциклопедия по машиностроению XXL. Оборудование…, Раздел 4. Машины и устройства специального назначения. Глава 17. Машины для разгрузки открытых вагонов. 1. Вагоноопрокидыватели. стр. 391-393, Рис. 210 - прототип.
На сайте (https://mashxxl.info/page/253193245162250181164091130124190093031184010007/)
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического расцепления железнодорожных вагонов | 1989 |
|
SU1766749A1 |
| ПЕРЕДВИЖНОЙ РАЗГРУЗОЧНЫЙ КОМПЛЕКС | 2005 |
|
RU2414410C2 |
| Устройство для обслуживания вагонов на вагоноопрокидывателе | 1986 |
|
SU1414739A1 |
| Устройство для подачи вагонов на опрокидыватель | 1960 |
|
SU136760A1 |
| Устройство перестановки углезагрузочных вагонов на коксовой батарее | 2023 |
|
RU2820610C1 |
| Вагоноопрокидыватель | 1979 |
|
SU829527A1 |
| Вагоноопрокидыватель | 1983 |
|
SU1102754A1 |
| Вагоноопрокидыватель для разгрузки сыпучих материалов из крытых железнодорожных вагонов | 1957 |
|
SU112257A1 |
| Вагоноопрокидыватель | 1988 |
|
SU1654197A1 |
| УСТРОЙСТВО ДЛЯ РАСЦЕПЛЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2020 |
|
RU2732676C1 |

Изобретение относится к области устройств для разгрузки, в частности к роторным вагоноопрокидывателям. Вагоноопрокидыватель содержит ротор и люльку с приемной платформой. Платформа выполнена сборной из подвижной и неподвижной частей. В люльке располагают цилиндрические гнезда для установки исполнительных механизмов-цилиндров. На штоки цилиндров устанавливают подвижную часть конструкции платформы. Упрощается расцепка вагонов в вагоноопрокидывателе. 2 ил. 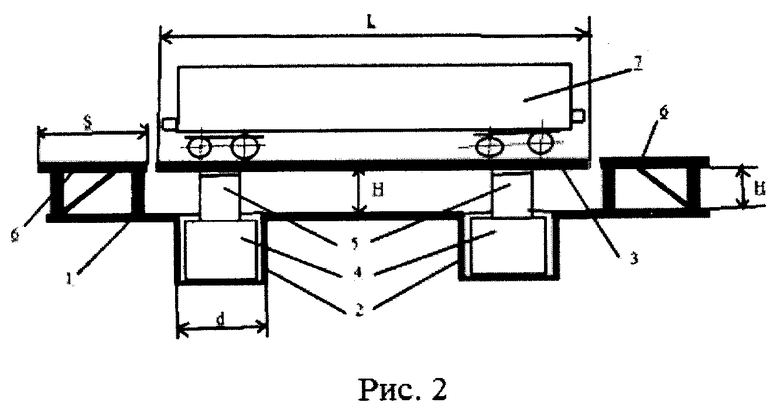
Вагоноопрокидыватель, содержащий ротор, люльку, в которой размещена приемная платформа, отличающийся тем, что приемная платформа выполнена в виде сборной конструкции, состоящей из двух частей - подвижной и неподвижной, которая устанавливается в люльку и имеет приваренные цилиндрические гнезда для установки исполнительных механизмов-цилиндров, на штоки которых устанавливается подвижная часть конструкции платформы.
| Устройство для обслуживания вагонов на вагоноопрокидывателе | 1986 |
|
SU1414739A1 |
| Устройство для автоматического расцепления движущихся вагонов | 1988 |
|
SU1615002A1 |
| Вагоноопрокидыватель | 1982 |
|
SU1118594A1 |
| Устройство для измерения и регистрации угла @ синхронной машины | 1982 |
|
SU1056076A1 |
| CN 111591315 A, 28.08.2020. | |||
