Изобретение относится к средствам подводной навигации, может быть применено для создания быстро развертываемых гидроакустических навигационных систем повышенной точности с использованием ультракороткой измерительной базы и использовано для обеспечения работы автономных и привязных необитаемых подводных аппаратов или других подводных технических средств, определения их местоположения и контроля с борта обеспечивающего судна.
Для подводной навигации известны гидроакустические системы определения местоположения на основе измерений дальности объекта навигации от ряда точек с известными координатами, называемые системами с длинной базой (ГАНС ДБ) (Гидроакустические навигационные средства. В.И. Бородин и др. - Л.: Судостроение, 1983. - 264 с.). Размер измерительной базы в ГАНС ДБ устанавливается расстоянием между подводными навигационными маяками (например, при рабочей частоте 12 кГц это 3-5 км), установленными в точках с известными координатами. Достигнутая высокая точность таких систем определена высокой точностью дальномерных измерений с использованием знания скорости и времени распространения навигационного сигнала. (Агеев М.Д., Киселев Л.В., Матвиенко Ю.В. и др. Автономные подводные роботы. - М., Наука, 2005, 398 с.). Основным недостатком ГАНС ДБ является необходимость размещения в районе работ сети опорных маяков.
Известны навигационные системы, в основе которых лежат измерения из точки с известными координатами дальности и углового положения источника навигационных сигналов. Эти системы называют гидроакустическими навигационными системами с ультракороткой измерительной базой (ГАНС УКБ), при этом размер измерительной базы определяется габаритами приемной антенной, которые сравнимы с длиной волны навигационного сигнала (например, при рабочей частоте 12 кГц это 0,1-0,2 м). Решение задачи определения местоположения объекта навигации фактически сводится к определению его углового положения на основе обработки данных, принимаемых такой малогабаритной навигационной антенной, поскольку дальность, определяемая как произведение времени прихода сигнала на задаваемую скорость его распространения – хорошо освоенная процедура и ее измерение с высокой точностью составляет основу высокой точности известных систем с длинной базой. В ГАНС УКБ объект навигации обычно излучает навигационный импульсный сигнал заданной частоты и длительности, а для определения углового положения (пеленга и угла места) объекта навигации необходимо получить фазовое распределение сигнала на апертуре приемной антенны и выполнить обработку связывающую полученные данные с характеристиками антенны. (Милн П.Х. Гидроакустические системы позиционирования. - Л., Судостроение, 1989, 316с.). При определении углового положения в основном в ГАНС УКБ рассматривается задача определения угла в горизонтальной плоскости-пеленга, так как угол места обычно известен на основании данных о глубине погружения объекта навигации.
Основной проблемой ГАНС УКБ является низкая точность угловых измерений.
Повышение точности таких систем возможно путем увеличения числа элементов в антенне, увеличения размера измерительной базы и повышения отношения сигнал/шум при приеме навигационного сигнала. Наиболее распространенной является модель построения системы с большим числом элементов. Так известна система с ультракороткой измерительной базой, в которой прием навигационного сигнала выполняется антенной, включающей 241 приемный элемент. Расстояние между элементами для однозначного определения фаз при этом не должно превышать половины длины волны. Недостатком таких устройств является неэффективное использование аппаратных средств, потому что для достижения высокой точности необходимо значительное увеличение числа элементов антенны и каналов обработки. Недостатком становится также значительный рост габаритов приемной антенны, усложняющий ее эксплуатацию. (URL:.www.kongsberg.com/ru/maritime/products/Acoustics-Positioning-and-Communication (дата обращения 08.12.2022).).
Другой известной возможностью увеличения точности является увеличение измерительной базы антенны при сохранении небольшого числа элементов. Однако, при значительном размере базы и ограниченном числе элементов антенны, где расстояние между элементами превышает половину длины волны навигационной частоты, возникают проблемы, связанные с неоднозначностью фазовых измерений на антенне. Для устранения неоднозначности необходимо привлекать дополнительную информацию о сокращении сектора обзора. Эта информация может быть получена усложнением антенны, например с использованием двухшкальных измерительных баз, в которых для увеличения точности все элементы приемной антенны разделены на две группы, образующие малую базу с размещением элементов по правилу d /2 для однозначного, но грубого пеленгования и большую базу, где элементы разнесены на несколько длин волн для точного пеленгования (Thomas C. Austin, Roger Stokey. Relative Acoustic Tracking- Sea Technology,1998, March, p.21-27., Luo Q, Yan X, Ju C, Chen Y, Luo Z. An Ultra-Short Baseline Underwater Positioning System with Kalman Filtering. Sensors (Basel). 2020 Dec 28;21(1):143, doi: 10.3390/s21010143. PMID: 33379311; PMCID: PMC7796008).
/2 для однозначного, но грубого пеленгования и большую базу, где элементы разнесены на несколько длин волн для точного пеленгования (Thomas C. Austin, Roger Stokey. Relative Acoustic Tracking- Sea Technology,1998, March, p.21-27., Luo Q, Yan X, Ju C, Chen Y, Luo Z. An Ultra-Short Baseline Underwater Positioning System with Kalman Filtering. Sensors (Basel). 2020 Dec 28;21(1):143, doi: 10.3390/s21010143. PMID: 33379311; PMCID: PMC7796008).
Известны ГАНС УКБ, в которых оценку углового положения объекта навигации получают по временным задержкам сигнала на апертуре круговой многоэлементной приемной антенны с использованием в качестве навигационного сложных широкополосных сигналов. Временные задержки сложного сигнала однозначно определяются на антенне любой конфигурации, но точное их измерение на ультракороткой измерительной базе (когда максимальная временная задержка сигнала соизмерима с периодом средней частоты навигационного сигнала) становится достаточно проблемным. В таких системах, например при размещении объекта навигации в плоскости приемной антенны, погрешность измерений пеленга  определяется погрешностью определения временных задержек σt и уменьшается с увеличением размера измерительной базы и ростом числа элементов. Например, для круговых антенн при условии, что момент прихода сигнала в каждом канале определяется с одинаковой погрешностью σt , эта погрешность имеет вид
определяется погрешностью определения временных задержек σt и уменьшается с увеличением размера измерительной базы и ростом числа элементов. Например, для круговых антенн при условии, что момент прихода сигнала в каждом канале определяется с одинаковой погрешностью σt , эта погрешность имеет вид  , где
, где  – максимальное время распространения сигнала между элементами антенны,
– максимальное время распространения сигнала между элементами антенны,  - число элементов в антенне,
- число элементов в антенне,  - радиус антенны,
- радиус антенны,  -скорость звука.
-скорость звука.
При применении широкополосного сигнала и прямом изменении времени достижение высокой точности возможно при значительном увеличении габаритов антенны (например если максимальное время измеряемой задержки будет составлять несколько десятков периодов средней частоты навигационного сигнала, то при рабочей частоте 12 кгц размер антенны в несколько десятков длин волн будет составлять несколько метров и это резко ограничивает ее применение например с борта обеспечивающего судна).
Другая возможность увеличения точности связана с уменьшением погрешности измерения временных задержек сигнала на апертуре антенны при значительном увеличения полосы сигнала, поскольку потенциальная точность измерения времени для широкополосного сигнала связана с его полосой ΔF и отношением «сигнал–шум» q посредством . (Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. М.: Радио и связь, 1981. 416 с.). При этом гидроакустические антенны, излучающие навигационные сигналы, эффективно работают только в окрестности своей резонансной частоты, и полоса рабочих частот обычно не превышает 30-40% от резонансной, например при 12 кГц полоса может составлять ΔF = 3-5 кГц. Соответственно при q = 20 дБ и ΔF = 5 кГц точность измерений временных задержек составляет σt = 20 мкс. В такой системе, например для семиэлементной антенны со средней частотой навигационного сигнала 12 кГц, оценка погрешности вычисления пеленга будет около 2°. В то же время для гармонического одночастотного сигнала при таком отношении «сигнал–шум» погрешность измерения фазы – менее 6°, что составляет основу достаточно точного пеленгования при использовании многоэлементных антенн с увеличенной апертурой.
. (Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. М.: Радио и связь, 1981. 416 с.). При этом гидроакустические антенны, излучающие навигационные сигналы, эффективно работают только в окрестности своей резонансной частоты, и полоса рабочих частот обычно не превышает 30-40% от резонансной, например при 12 кГц полоса может составлять ΔF = 3-5 кГц. Соответственно при q = 20 дБ и ΔF = 5 кГц точность измерений временных задержек составляет σt = 20 мкс. В такой системе, например для семиэлементной антенны со средней частотой навигационного сигнала 12 кГц, оценка погрешности вычисления пеленга будет около 2°. В то же время для гармонического одночастотного сигнала при таком отношении «сигнал–шум» погрешность измерения фазы – менее 6°, что составляет основу достаточно точного пеленгования при использовании многоэлементных антенн с увеличенной апертурой.
(Матвиенко Ю.В. ОЦЕНКА ПРАКТИЧЕСКИ ДОСТИЖИМОЙ ТОЧНОСТИ СОВРЕМЕННЫХ ГИДРОАКУСТИЧЕСКИХ НАВИГАЦИОННЫХ СИСТЕМ С УЛЬТРАКОРОТКОЙ ИЗМЕРИТЕЛЬНОЙ БАЗОЙ ДЛЯ ПОДВОДНЫХ РОБОТОВ // Гироскопия и навигация. Том 31. №2 (121), 2023, с.106-120, EDN MHPDQS.)
Известна также ГАНС УКБ с использованием гармонического сигнала в качестве навигационного и обработкой данных круговой антенной с небольшим числом элементов (Матвиенко Ю.В., Макаров В.Н., Кулинченко С.И., Нургалиев Р.Ф., Рылов Р.Н. Гидроакустическая навигационная система с ультракороткой базой. - Морские технологии, Владивосток, Дальнаука, 2000г, вып.3, с.102-113). Особенности измерения углового положения объекта навигации этой системы изложены в патенте ( Матвиенко Ю.В., Макаров В.Н., Кулинченко С.И., Нургалиев Р.Ф., Рылов Р.Н., Касаткин Б.А. Пеленгатор гидроакустической навигационной системы с ультракороткой базой. - Патент РФ №2179730, Бюл. Изобр.№5, 2002г.)
В этой ГАНС УКБ для навигации используются одночастотные сигналы. Прием сигналов выполняется антенной с круговой базой, на которой эквидистантно размещены приемных элементов, расстояние между приемными элементами антенны выбирается из диапазона от 0,5 до 3 длин волн навигационной частоты, а обработка - -канальными измерителями фазы, амплитуды и отношения сигнал-шум. Фазовая неоднозначность при обработке устраняется выбором углового сектора прихода сигнала фазированием антенны на источник навигационного сигнала. Направление главного максимума при фазировании используется в качестве начальной оценки угла, причем для однозначного определения углового сектора при фазировании должны отсутствовать добавочные максимумы (равные главному), возникающие когда межэлементное расстояние превышает три длины волны навигационной частоты. Для вычисления углового положения объекта навигации используется уравнение, связывающее измеренных значений фаз навигационного сигнала на апертуре антенны с характеристикой приемной антенны, определяющей ожидаемую фазу сигнала на  –й элемент круговой антенны относительно ее центра при известном угловом положении объекта.
–й элемент круговой антенны относительно ее центра при известном угловом положении объекта.
Недостатком такой системы является то, что при небольшом числе элементов антенны нельзя увеличить точность за счет увеличения расстояния межу элементами, потому что модель обработки с использованием фазирования становится неработоспособной для выбора начального углового сектора за счет появления дополнительных лепестков характеристики направленности антенны равном главному при увеличении расстояния между элементами более трех длин волн. Так для семиэлементной круговой антенны с расстоянием между элементами равным 3 длины волны навигационной частоты 12 кГц и отношении сигнал /шум 10 дБ оценка достижимой точности составляет 0,3°. При этом диаметр антенны увеличивается до 6 длин волн. (Матвиенко Ю.В. ОЦЕНКА ПРАКТИЧЕСКИ ДОСТИЖИМОЙ ТОЧНОСТИ СОВРЕМЕННЫХ ГИДРОАКУСТИЧЕСКИХ НАВИГАЦИОННЫХ СИСТЕМ С УЛЬТРАКОРОТКОЙ ИЗМЕРИТЕЛЬНОЙ БАЗОЙ ДЛЯ ПОДВОДНЫХ РОБОТОВ // Гироскопия и навигация. Том 31. №2 (121), 2023, с.106-120, EDN MHPDQS.)
Кроме того, при использовании одночастотного сигнала увеличение энергии сигнала за счет мощности его излучения всегда ограничено технологическими проблемами, что также не позволяет увеличить точность угловых измерений за счет возможности увеличения отношения сигнал шум в точке приема.
Гидроакустическая навигационная система с ультракороткой базой, включающая описанное устройство определения углового положения, по структуре оборудования и назначению является наиболее близкой к заявленному изобретению и принята за его прототип.
Задачей настоящего изобретения является создание гидроакустической навигационной системы с ультракороткой базой при использовании антенны с небольшим числом элементов и увеличенным размером измерительной базы, обеспечивающей высокую точность измерений углового положения объекта навигации.
Поставленная задача решается следующим образом.
Гидроакустическая навигационная система определения местоположения подводного объекта с использованием ультракороткой измерительной базы реализуется путем определения дальности и углового положения объекта навигации из точки с известными координатами. Система включает размещенный на борту объекта навигации источник гидроакустических навигационных сигналов, а в точке с известными координатами – приемник этих навигационных сигналов, объединенных общей системой единого времени. Приемник системы для измерения углового положения объекта навигации содержит -элементную круговую антенну, -канальный блок обработки для определения фаз навигационного сигнала на апертуре антенны и измерения времени распространения, а также вычислитель определяющий дальность путем произведения времени прихода сигнала на задаваемую скорость его распространения и вычислитель углового положения объекта навигации по определяемому распределению времени прихода сигнала на элементы антенны.
Система отличается тем, что
-в качестве гидроакустического навигационного сигнала используется широкополосный многочастотный сигнал с числом частотных составляющих равным  ; сосредоточенным в рабочей полосе пропускания антенны источника;
; сосредоточенным в рабочей полосе пропускания антенны источника;
- в каждом из каналов блока обработки выполняется расчет фазы  на каждой частотной составляющей навигационного сигнала;
на каждой частотной составляющей навигационного сигнала;
- в каждом из приемных каналов выполняется расчет временных задержек прихода  навигационного сигнала относительно центра круговой антенны по формуле
навигационного сигнала относительно центра круговой антенны по формуле
где - дробная (измеряемая) часть фазы  той частоты в -ном канале антенны,
той частоты в -ном канале антенны,  – период
– период  -той частоты ,
-той частоты , –число неизвестных полных периодов -той частоты добавляемых ко времени, измеренному по значению дробной фазы ,
–число неизвестных полных периодов -той частоты добавляемых ко времени, измеренному по значению дробной фазы ,  –максимальное число периодов -той частоты на апертуре антенны, - радиус антенны, -скорость звука;
–максимальное число периодов -той частоты на апертуре антенны, - радиус антенны, -скорость звука;
-при этом для каждой частотной составляющей сигнала в -ном канале обработки в соответствии с приведенной формулой формируется ряд из  возможных значений временных задержек прихода, сравниваются ряды на всех частотах и из каждого ряда выбирается временная задержка прихода сигнала на основании условия ее равенства на всех частотах;
возможных значений временных задержек прихода, сравниваются ряды на всех частотах и из каждого ряда выбирается временная задержка прихода сигнала на основании условия ее равенства на всех частотах;
-угловое положение (пеленг) определяется из решения уравнения

где ,
,  , - измеренная временная задержка прихода сигнала на –ный элемент круговой антенны, относительно центра круговой антенны,
, - измеренная временная задержка прихода сигнала на –ный элемент круговой антенны, относительно центра круговой антенны,
 - характеристика приемной антенны, определяющая ожидаемую временную задержку прихода сигнала на -й элемент круговой антенны относительно ее центра при пеленге на источник, равном
- характеристика приемной антенны, определяющая ожидаемую временную задержку прихода сигнала на -й элемент круговой антенны относительно ее центра при пеленге на источник, равном  .
.
Заявленная гидроакустическая навигационная система с ультракороткой базой в сопоставлении с прототипом имеет следующие существенные отличительные признаки.
Признак: «…в качестве гидроакустического навигационного сигнала используется широкополосный многочастотный сигнал с числом частотных составляющих равным ; сосредоточенным в рабочей полосе пропускания антенны источника» - обеспечивает увеличение энергии сигнала пропорциональное числу частотных составляющих и соответственно при обработке данных увеличение точности угловых измерений.
Признак «… в каждом из каналов блока обработки выполняется расчет фазы на каждой частотной составляющей навигационного сигнала;» -расширяет объем данных, используемых при определении угловых характеристик, и вычисляет дробную часть фазы на каждой частоте (фазу с точностью до целого числа длин волн) и фактически устанавливает точность определения временных задержек на апертуре антенны.
Признак «…в каждом из приемных каналов выполняется расчет временных задержек прихода навигационного сигнала относительно центра круговой антенны по формуле
где - дробная (измеряемая) часть фазы той частоты в -ном канале антенны, – период -той частоты , –число неизвестных полных периодов -той частоты добавляемых ко времени, измеренному по значению дробной фазы , –максимальное число периодов -той частоты на апертуре антенны, - радиус антенны, -скорость звука…» -позволяет исключить прямые измерения времени на апертуре антенн, и определять временные задержки по данным фазовых измерений.
Признак «… при этом для каждой частотной составляющей сигнала в -ном канале обработки в соответствии с приведенной формулой формируется ряд из возможных значений временных задержек прихода, сравниваются ряды на всех частотах и из каждого ряда выбирается временная задержка прихода сигнала на основании условия ее равенства на всех частотах» - обеспечивает обработку многочастотной фазовой информации для определения полных фаз в элементах антенны и, после нормирования на соответствующую частоту, измерения временных задержек сигнала с минимальной погрешностью, равной погрешности измерения дробной фазы. Максимальное значение плотности распределения временных задержек по сформированным частотным рядам соответствует искомым и однозначно определяемым временным задержкам навигационного сигнала на апертуре антенны.
Признак «…угловое положение (пеленг) определяется из решения уравнения
где , 
- измеренная временная задержка прихода сигнала на –ный элемент круговой антенны, относительно центра круговой антенны,
- характеристика приемной антенны, определяющая ожидаемую временную задержку прихода сигнала на –ный элемент круговой антенны относительно ее центра при пеленге на источник равном » - служит для расчета углового положения как результата взвешенного усреднения пеленгов по временным задержкам, определенным по всем возможным парам элементов антенны с учетом с учетом геометрических весовых коэффициентов. Геометрические весовые коэффициенты отражают крутизну характеристики ожидаемых времен прихода сигнала на соответствующей пары элементов в окрестности ожидаемого значения угла, определяемые при градуировке антенны.
Новизна заявленной гидроакустической навигационной системы с ультракороткой базой заключается в том, что:
- вместо гармонических одночастотных сигналов используются широкополосные многочастотные сигналы со значительно большей энергией,
- вместо обычных прямых измерений времени используется процедура расчета полных фаз многочастотного сигнала с расчетом временных задержек на каждой частоте и усреднением времени по всем частотам широкополосного сигнала,
- определение пеленга основано на статистической обработке разницы текущего измеряемого времени на всех элементах антенны и ожидаемых временных задержек на этих элементах, определяемых при градуировке антенны характеристики приемной антенны, определяющей ожидаемые временные задержки прихода сигнала на  -й элемент круговой антенны относительно ее центра при пеленге на источник равном
-й элемент круговой антенны относительно ее центра при пеленге на источник равном  .
.
- ГАНС УКБ имеет малогабаритную приемную антенну с небольшим числом элементов, при этом обеспечивает высокую точность измерений углового положения объекта навигации.
Совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигаемым техническим результатом. На основании изложенного можно заключить, что заявленное техническое решение является новым и обладает изобретательским уровнем, т.к. явным образом не следует из уровня техники и пригодно для промышленного применения.
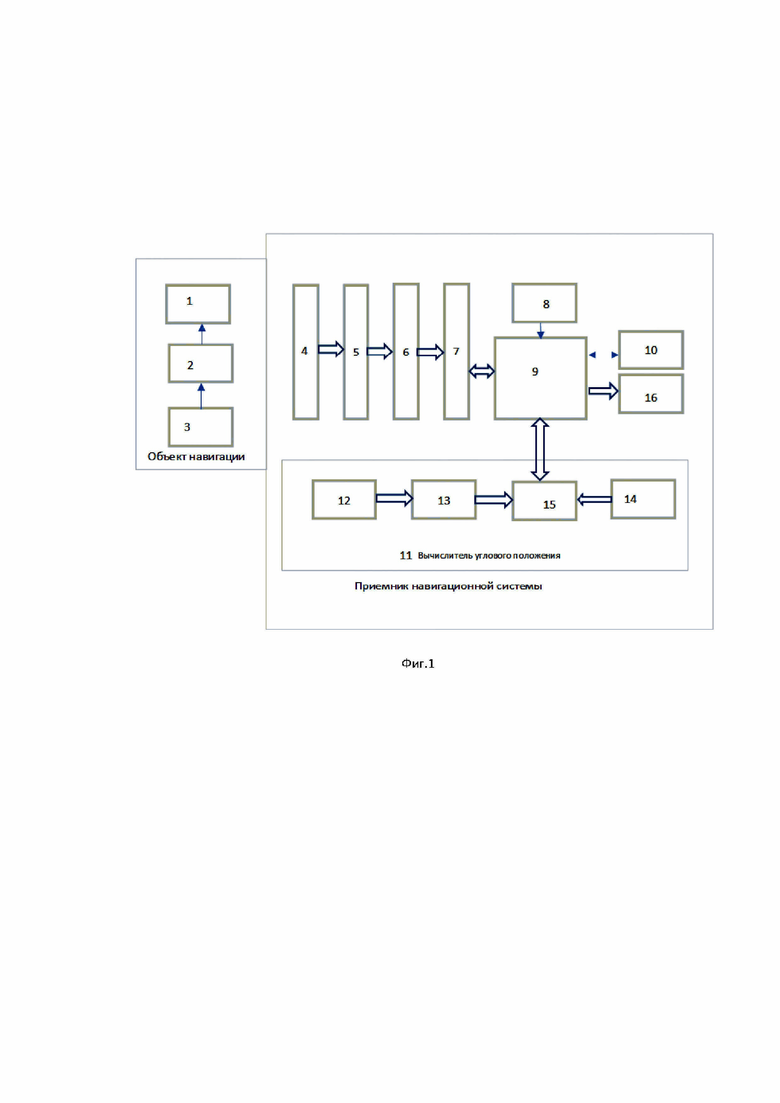
Сущность изобретения поясняется фиг.1, где изображена структурная схема гидроакустической навигационной системы с ультракороткой базой.
Система состоит из оборудования на борту объекта навигации и оборудования в точке приема.
На борту объекта установлены излучающая антенна 1, формирователь многочастотных навигационных сигналов 2 и система единого времени 3.
В состав приемного оборудования входят  -канальная круговая приемная антенна 4, -канальный блок аналоговой обработки 5, -канальный аналого-цифровой преобразователь 6, блок памяти 7, система единого времени 8, компьютер 9, вычислитель времени прихода навигационного сигнала 10, вычислитель углового положения 11,
-канальная круговая приемная антенна 4, -канальный блок аналоговой обработки 5, -канальный аналого-цифровой преобразователь 6, блок памяти 7, система единого времени 8, компьютер 9, вычислитель времени прихода навигационного сигнала 10, вычислитель углового положения 11,  – канальный измеритель фазы 12, блок определения временных задержек навигационного сигнала относительно центра антенны 13, блок данных о характеристиках приемной антенны 14, блок решения уравнения углового положения 15, блок расчета координат 16.
– канальный измеритель фазы 12, блок определения временных задержек навигационного сигнала относительно центра антенны 13, блок данных о характеристиках приемной антенны 14, блок решения уравнения углового положения 15, блок расчета координат 16.
ГАНС УКБ работает следующим образом. Антенна 1 на объекте навигации излучает сформированный в 2 широкополосный навигационный сигнал длительностью  с числом частотных составляющих равным
с числом частотных составляющих равным  , в моменты времени жестко задаваемые системой единого времени 3, которая также синхронизирована с аналогичной 8 в пункте приема. (Длительность сигнала и число частотных составляющих выбираются с учетом максимального заполнения рабочей полосы частот излучающей антенны. Так например, для средней частоты 12 кГц и полосы 5 кГц при =10 мс, число частотных составляющих может быть =25). Сигнал принимается элементами антенны 4 и, после обычных предварительной аналоговой обработки 5 и аналого-цифрового преобразования 6, поступает в блок памяти 7. Далее компьютер 9 программными средствами реализует вычисление дальности 10, углового положения 11 и координат объекта навигации 16.
, в моменты времени жестко задаваемые системой единого времени 3, которая также синхронизирована с аналогичной 8 в пункте приема. (Длительность сигнала и число частотных составляющих выбираются с учетом максимального заполнения рабочей полосы частот излучающей антенны. Так например, для средней частоты 12 кГц и полосы 5 кГц при =10 мс, число частотных составляющих может быть =25). Сигнал принимается элементами антенны 4 и, после обычных предварительной аналоговой обработки 5 и аналого-цифрового преобразования 6, поступает в блок памяти 7. Далее компьютер 9 программными средствами реализует вычисление дальности 10, углового положения 11 и координат объекта навигации 16.
Для вычисления дальности определяется время распространения навигационного импульса по трассе «объект навигации-приемник» и используется задаваемая скорость сигнала. Ошибка измерения времени для широкополосного сигнала с полосой ΔF существенно меньше в сравнении с гармоническим сигналом (например на частоте 12 кгц при q = 20 дБ и ΔF = 5 кГц ошибка измерений времени распространения составляет σt = 20 мкс, а при использовании гармонического сигнала длительностью 10 мс и q = 20 дБ ошибка почти на два порядка больше - σt = 1 мс).
Для вычисления углового положения сначала в блоке 12 определяется дробная фаза 
 частоты навигационного сигнала в
частоты навигационного сигнала в  канале антенны с использованием программно реализованных квадратурных приемников. Далее в блоке 13 выполняется определение временных задержек навигационного сигнала относительно центра антенны. Для этого в каждом канале антенны выполняется операция восстановления полной фазы частоты навигационного сигнала суммированием дробной фазы с целым числом периодов этой частоты. Число целых периодов подлежит определению. Эта операция включает формирование для каждой частоты рядов возможных значений полной фазы сигнала в канале антенны с учетом ограничений, определяемым размером антенны, нормирование полученных значений на соответствующую частоту и получение рядов возможных временных задержек по каждой частоте, сравнение этих рядов на всех частотах и выбор искомой временной задержки в каждом канале антенны из условия равенства ожидаемых временных задержек на всех частотах.
канале антенны с использованием программно реализованных квадратурных приемников. Далее в блоке 13 выполняется определение временных задержек навигационного сигнала относительно центра антенны. Для этого в каждом канале антенны выполняется операция восстановления полной фазы частоты навигационного сигнала суммированием дробной фазы с целым числом периодов этой частоты. Число целых периодов подлежит определению. Эта операция включает формирование для каждой частоты рядов возможных значений полной фазы сигнала в канале антенны с учетом ограничений, определяемым размером антенны, нормирование полученных значений на соответствующую частоту и получение рядов возможных временных задержек по каждой частоте, сравнение этих рядов на всех частотах и выбор искомой временной задержки в каждом канале антенны из условия равенства ожидаемых временных задержек на всех частотах.
В блоке 15 выполняется расчет углового положения объекта навигации на основе статистической обработки избыточных данных по минимуму дисперсии измеренных временных задержек на апертуре антенны и ранее определенных при градуировке характеристик антенны из блока 14, связывающих распределение ожидаемых временных задержек как функции углового положения объекта  , которое приводится к виду:
, которое приводится к виду:

Далее в блоке 16 по измеренным дальности и угловому положению определяются координаты объекта навигации в локальной системе координат с центром в точке размещения приемной антенны.
В заявленной системе применение широкополосного сигнала позволяет увеличить точность измерения дальности и увеличить энергию многочастотного навигационного сигнала. Точное определение временных задержек в реальных системах, использующих излучающие антенны с ограниченной полосой рабочих частот, построено на основе измерений полных фаз на каждой частотной составляющей навигационного сигнала.
В системе обеспечивается высокая точность углового положения применением антенны с минимальным числом приемных элементов, размещенных с большим шагом на круговой базе с использованием данных о распределении временных задержек сигнала на апертуре антенны. Так например для семиэлементной антенны с диаметром четыре длины волны средней частоты 12 кГц (около 50см) и полосы 5 кГц при =10 мс, при числе частотных составляющих =25, отношении сигнал/шум на каждой частоте 10дБ, потенциальная погрешность измерения пеленга будет составлять менее 0,05°. Описанная гидроакустическая навигационная системами с ультракороткой измерительной базой разработана в ИПМТ ДВО РАН и планируется для навигационной поддержки подводных роботов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| ПЕЛЕНГАТОР ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ С УЛЬТРАКОРОТКОЙ БАЗОЙ | 2000 |
|
RU2179730C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| Гидроакустический комплекс позиционирования и связи для навигационно-информационного обеспечения автономных необитаемых подводных аппаратов | 2023 |
|
RU2812089C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2431156C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАЧАЛЬНЫХ КООРДИНАТ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2016 |
|
RU2629916C1 |
| СПОСОБ НАВИГАЦИИ И ДИНАМИЧЕСКОГО ПОЗИЦИОНИРОВАНИЯ СУДНА | 2016 |
|
RU2642147C2 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
Использование: изобретение относится к средствам подводной навигации, может быть применено для создания быстро развертываемых гидроакустических навигационных систем повышенной точности с использованием ультракороткой измерительной базы и использовано для обеспечения работы автономных и привязных необитаемых подводных аппаратов или других подводных технических средств, определения их местоположения и контроля с борта обеспечивающего судна. Сущность: предложена система точного определения координат подводного объекта, основанная на измерениях из точки с известными координатами дальности и углового положения источника навигационных сигналов. Система отличается от известных тем, что вместо гармонических одночастотных сигналов используются широкополосные многочастотные сигналы со значительно большей энергией, обычных прямых измерений времени используется процедура расчета полных фаз многочастотного сигнала с расчетом временных задержек на каждой частоте и усреднением времени по всем частотам широкополосного сигнала, определение пеленга основано на статистической обработке разницы текущего измеряемого времени на всех элементах антенны и ожидаемых временных задержек на этих элементах, определяемых при градуировке антенны характеристиках приемной антенны. Технический результат: повышение точности измерений углового положения объекта навигации гидроакустической навигационной системы с ультракороткой базой при использовании антенны с небольшим числом элементов и увеличенным размером измерительной базы. 1 ил. 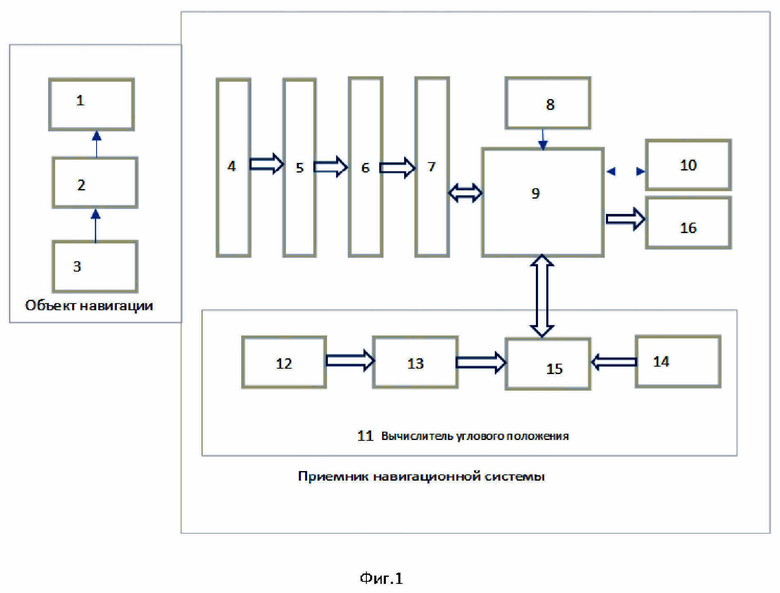
Гидроакустическая навигационная система определения местоположения подводного объекта с использованием ультракороткой измерительной базы, реализуемая путем определения дальности и углового положения объекта навигации из точки с известными координатами, включающая размещенный на борту объекта навигации источник гидроакустических навигационных сигналов, а в точке с известными координатами – приемник этих сигналов, объединенных общей системой единого времени, при этом для измерения углового положения объекта навигации приемник системы содержит N-элементную круговую антенну, N-канальный блок обработки для определения фаз навигационного сигнала на апертуре антенны и измерения времени распространения, а также вычислитель, определяющий дальность путем произведения времени прихода сигнала на задаваемую скорость его распространения, и вычислитель углового положения объекта навигации по определяемому распределению времени прихода сигнала на элементы антенны,
отличающаяся тем, что
в качестве гидроакустического навигационного сигнала используется широкополосный многочастотный сигнал с числом частотных составляющих, равным  ; сосредоточенным в рабочей полосе пропускания антенны источника;
; сосредоточенным в рабочей полосе пропускания антенны источника;
в каждом из N каналов блока обработки выполняется расчет фазы ϕni на каждой частотной составляющей навигационного сигнала;
в каждом из N приемных каналов выполняется расчет временных задержек прихода tn навигационного сигнала относительно центра круговой антенны по формуле
 ,
,
где ϕni - дробная (измеряемая) часть фазы i-й частоты в n-м канале обработки, Ti – период i-й частоты, mi = 0, 1, 2 … mi,max - число неизвестных полных периодов i-й частоты, добавляемых ко времени, измеренному по значению дробной фазы,  - максимальное число периодов i-й частоты на апертуре антенны, b - радиус антенны, c - скорость звука;
- максимальное число периодов i-й частоты на апертуре антенны, b - радиус антенны, c - скорость звука;
при этом для каждой частотной составляющей сигнала в n-м канале обработки в соответствии с приведенной формулой формируется ряд из  возможных значений временных задержек прихода, сравниваются ряды на всех частотах и из каждого ряда выбирается временная задержка прихода сигнала на основании условия ее равенства на всех частотах;
возможных значений временных задержек прихода, сравниваются ряды на всех частотах и из каждого ряда выбирается временная задержка прихода сигнала на основании условия ее равенства на всех частотах;
угловое положение (пеленг) определяется из решения уравнения
 ,
,
где ,
,  ,
,  - измеренная временная задержка прихода сигнала на n–й элемент круговой антенны относительно центра круговой антенны,
- измеренная временная задержка прихода сигнала на n–й элемент круговой антенны относительно центра круговой антенны,
 - характеристика приемной антенны, определяющая ожидаемую временную задержку прихода сигнала на n–й элемент круговой антенны относительно ее центра, при пеленге на источник, равном β.
- характеристика приемной антенны, определяющая ожидаемую временную задержку прихода сигнала на n–й элемент круговой антенны относительно ее центра, при пеленге на источник, равном β.
| Способ навигации и позиционирования подводных объектов в глубоководном канале на больших дальностях и система для его осуществления | 2018 |
|
RU2674404C1 |
| Способ пассивного определения координат источников гидроакустического излучения | 2017 |
|
RU2680860C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| Способ пассивного определения координат источников гидроакустического излучения | 2018 |
|
RU2711432C1 |
| Способ определения местоположения подводного объекта | 2018 |
|
RU2709100C1 |
| СПОСОБ И СИСТЕМА НАВИГАЦИИ ПОДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2659299C1 |
| US 9013959 B2, 21.04.2015. | |||
