Из уровня техники известен ДВУХСТЕПЕННОЙ СТЕНД ДЛЯ ЗАДАНИЯ УГЛОВЫХ КОЛЕБАНИЙ (RU 2367921 C2, опубл. 20.09.2009. Бюл. № 26), содержащий раскачивающуюся в двух плоскостях платформу, установленную на крестообразном подвесе, датчики углового положения платформы по каждой оси и два двигателя с редукторами, отличающийся тем, что в него дополнительно введены кривошипно-кулисные механизмы, преобразующие вращательные движения двигателей в угловые движения платформы и расположенные на неподвижном основании, и подшипник качения, передающий платформе угловые колебания от кривошипно-кулисного механизма по одной из осей без модуляции колебаниями платформы по второй оси.
Недостатками данного аналога является то, что он осуществляет испытания только по двум осям, не исключает внешние воздействия на объект во время проведения испытаний и регулирует только частоту колебаний, не позволяя осуществлять регулировку амплитуды качения.
Также из уровня техники известна УСТАНОВКА ДЛЯ ИСПЫТАНИЯ ОБЪЕКТОВ, РАБОТАЮЩИХ В УСЛОВИЯХ КАЧКИ (SU 993093 A1, опубл. 30.01.1983) содержащая станину, на которой размещены приводы вращательного движения, кинематически связанные с ведущими звеньями механизмов преобразования вращательного движения приводов в поступательное движение ведомых звеньев, в свою очередь кинематически связанных с платформой, снабженной поворотным столом для размещения испытуемого объекта, отличающаяся тем, что, с целью повышения производительности испытаний, снижения трудоемкости и времени, ведомое звено первого механизма преобразования вращательного движения в поступательное связано с платформой посредством одноподвижной вращательной кинематической пары, а ведомое звено второго механизма преобразования вращательного движения в поступательное связано с платформой посредством двуподвижной вращательно-поступательной кинематической пары, при этом установка снабжена блоком регулирования амплитуд, фаз и частот периодических перемещений ведомых звеньев механизмов преобразования вращательного движения приводов в поступательное движение ведомых звеньев, а также блоком синхронизации приводов.
Недостатками данного аналога является то, что он производит испытания только по двум осям, а также обладает крайне сложной конструкцией.
Наиболее близким по технической сущности к заявляемому техническому решению выбран ДВУХПЛОСКОСТНОЙ СТЕНД ДЛЯ ИСПЫТАНИЙ НА КАЧКУ И СПОСОБ ЕГО ПРИМЕНЕНИЯ ДЛЯ ИСПЫТАНИЯ ТЕПЛОГИДРАВЛИЧЕСКИХ МОДЕЛЕЙ (RU 202079 U1, опубл. 29.01.2021. Бюл. №4), содержащий раскачивающуюся в двух плоскостях платформу, установленную на крестообразном подвесе, отличающийся тем, что оснащен двумя взаимонезависимыми ортогональными плоскостями подвеса, двумя мотор-редукторами, состоящими из асинхронных двигателей, оснащенных преобразователями частоты для регулирования числа оборотов, и червячными редукторами, оснащенными энкодерами угла поворота, кривошипно-шатунные механизмы с возможностью регулирования, преобразующие вращательное движение двигателей в колебания качающейся платформы, оснащенной 3-осевым акселерометром, на которую помещается исследуемый объект.
Недостатком наиболее близкого аналога является то, что он позволяет проводить испытания только по двум осям, не исключает внешние воздействия на объект во время проведения испытаний, а также не позволяет регулировать амплитуду качения индивидуально для каждой из осей.
Задачей изобретения является устранение недостатков наиболее близкого аналога (прототипа).
Техническим результатом настоящего изобретения является то, что заявленный стенд синусоидальных колебаний позволяет осуществлять испытания систем стабилизации широкого ряда приборов по трем осям с высокой точностью и возможностью установки требуемой амплитуды, а также периода качения независимо по каждой из трех осей.
Указанный технический результат достигается за счет того, что стенд синусоидальных колебаний, содержащий электромеханическую часть, стойку управления и пульт управления, при этом электромеханическая часть содержит не менее трех стоек, основание, опору оси Y, опору оси Z, опору оси X, датчики угла, привод оси Y, привод оси X и привод оси Z, и установочную площадку.
В отличие от известных аналогов, каждая из стоек электромеханической части выполнена с возможностью амортизации вибраций и регулирования по высоте, привод оси Y, привод оси X и привод оси Z, имеют идентичную конструкцию, при этом каждый из приводов содержит, кривошип, выполненный с возможностью индивидуальной регулировки амплитуды качения, а стойка управления содержит, блок формирования угловых колебаний по оси X, блок формирования угловых колебаний по оси Y, блок формирования угловых колебаний по оси Z, выполненные с возможностью индивидуального изменения периода колебаний по каждой из осей.
В частности, стойка управления соединена с электромеханической частью и пультом управления с помощью кабелей питания и кабелей связи.
В частности, электромеханическая часть соединена с пультом управления с помощью кабелей связи.
В частности, пульт управления с помощью кабелей питания подключен к блоку питания стойки управления и с помощью кабелей связи к датчикам угла электромеханической части.
В частности, установочная площадка выполнена съемной.
В частности, к опоре оси X прикреплена платформа, таким образом, что вместе они образуют двухуровневую стойку, выполненную с возможностью установки на платформу и закрепления на ней электронных блоков из состава испытываемых приборов.
В частности, опора оси X установлена, таким образом, что ось вращения опоры X проходит через точку пересечения осей вращения опор оси Y и опоры оси Z.
Краткое описание чертежей
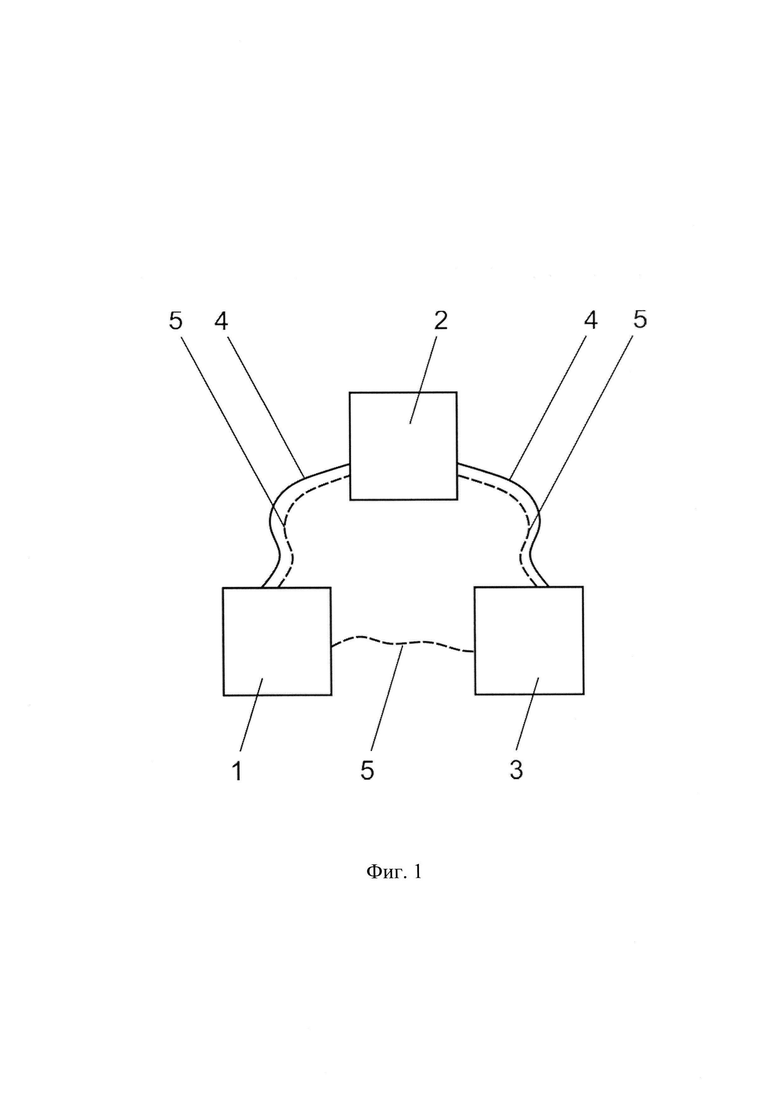
Фиг. 1 - схематическое изображение стенда синусоидальных колебаний.
Фиг. 2 - электромеханическая часть стенда (вид спереди).
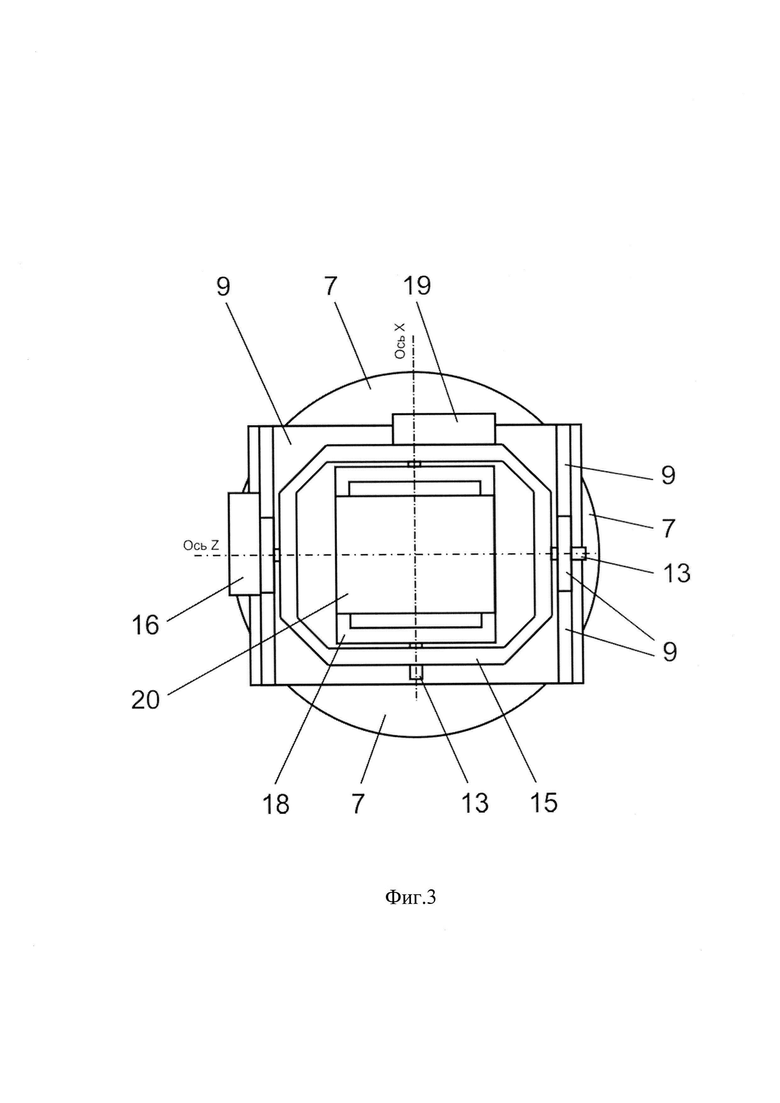
Фиг. 3 - электромеханическая часть стенда (вид сверху).
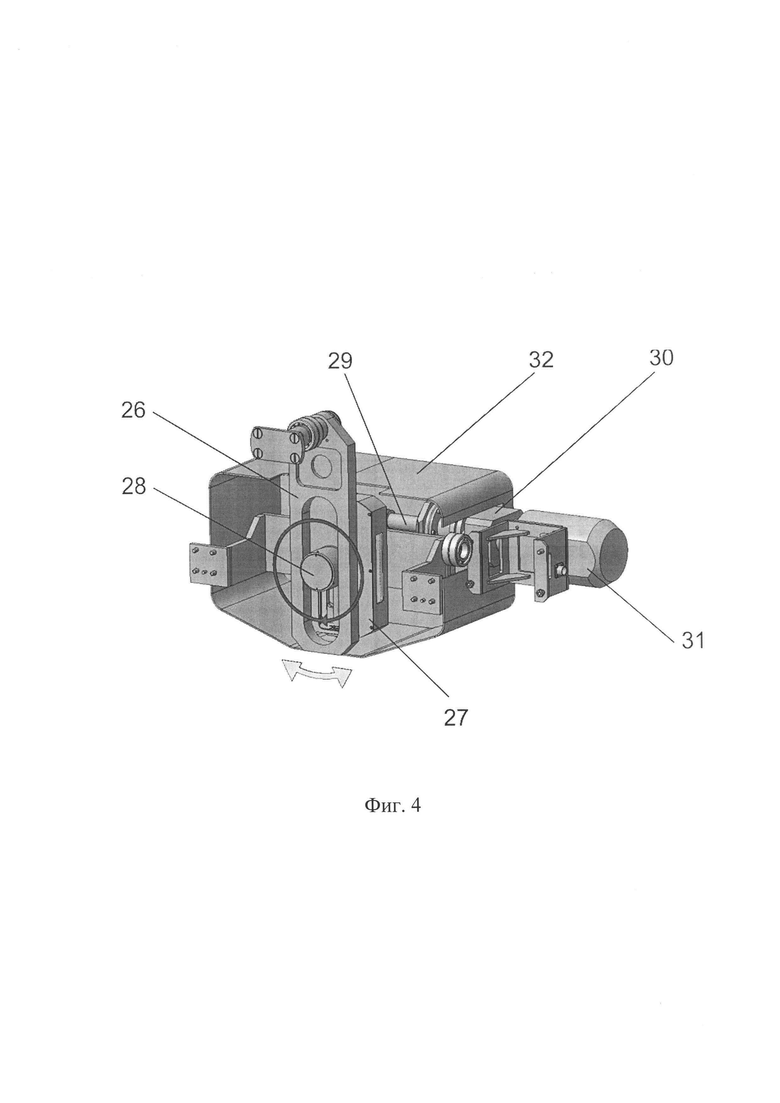
Фиг. 4 - привод.
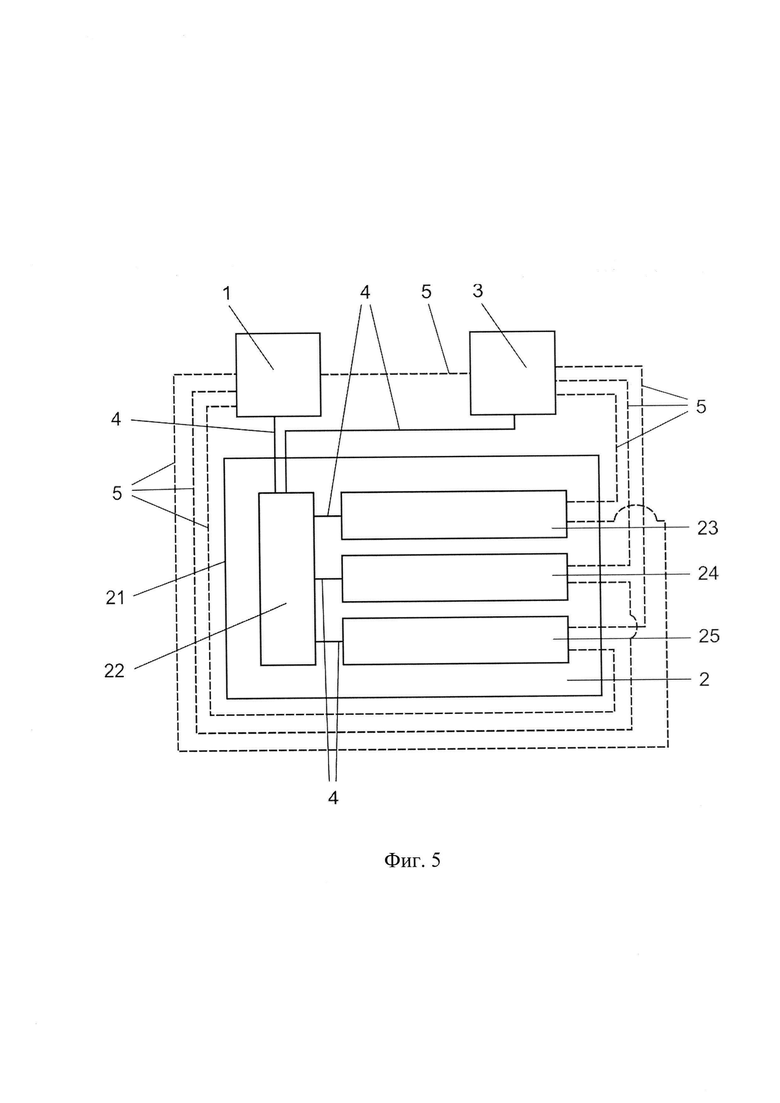
Фиг. 5 - схематическое изображение стойки управления.
На фигурах обозначено: 1 - электромеханическая часть, 2 - стойка управления, 3 - пульт управления, 4 - кабели питания, 5 - кабели связи, 6 - стойки, 7 - основание, 8 - упорный погонный подшипник, 9 - опора оси Y, 10 - нижняя часть, 11 - стойка, 12 - привод оси Y, 13 - датчик угла, 14 - подшипник, 15 - опора оси Z, 16 - привод оси Z, 17 - платформа, 18 - опора оси X, 19 - привод оси X, 20 - установочная площадка, 21 - корпус, 22 - блок питания, 23 - блок формирования угловых колебаний по оси X, 24 - блок формирования угловых колебаний по оси Y, 25 - блок формирования угловых колебаний по оси Z, 26 - рычаг, 27 - кривошип, 28 - палец кривошипа, 29 - червячный механизм, 30 - редуктор, 31 - электродвигатель, 32 - защитный кожух.
Осуществление изобретения
Стенд синусоидальных колебаний содержит (фиг. 1) электромеханическую часть 1, стойку управления 2 и пульт управления 3, при этом стойка управления 2 соединена с электромеханической частью 1 и пультом управления 3 с помощью кабелей питания 4 и кабелей связи 5, а электромеханическая часть 1 соединена с пультом управления 3 с помощью кабелей связи 5.
Электромеханическая часть 1 содержит (фиг. 2, фиг. 3) не менее трех стоек 6, каждая из которых выполнена с возможностью амортизации вибраций между электромеханической частью 1 и поверхностью, на которую электромеханическая часть 1 установлена с возможностью регулирования по высоте. К верхней части стоек 6 жестко, например, с помощью болтового соединения закреплено основание 7. Верхняя центральная часть основания 7 жестко, например, с помощью болтового соединения соединена с нижней частью упорного погонного подшипника 8, при этом верхняя часть погонного подшипника 8 жестко, например, с помощью болтового соединения соединена с нижней частью 10 опоры оси Y 9, состоящей из нижней части 10 и стоек 11. Снизу к основанию 7 жестко, например, с помощью болтового соединения прикреплен привод оси Y 12, выполненный с возможностью формирования и передачи углового вращения по оси
Y на опору оси Y 9. Кроме того, снизу к основанию 7 жестко, например, с помощью болтового соединения прикреплен датчик угла 13, выполненный с возможностью определения величины углового перемещения опоры оси Y 9 относительно основания 7 и передачи таких данных в пульт управления 3 через кабели связи 5. При этом датчик угла 13 представляет собой высокоточный датчик (энкодер) углового перемещения. В верхней части стоек 11 симметрично на одном уровне относительно нижней части 10 выполнены отверстия (на фигурах не представлены), в которые через подшипники 14 установлена опора оси Z 15 таким образом, что центр опоры оси Z 15 расположен на оси Y таким образом, что оси вращения опор Y и Z лежат в одной плоскости. На наружной плоскости одной из стоек 11 жестко, например, с помощью болтового соединения закреплен привод оси Z 16, выполненный с возможностью формирования и передачи углового вращения по оси Z на опору оси Z 15. Кроме того, на одной из стоек 11 жестко, например, с помощью болтового соединения, закреплен датчик угла 13, выполненный с возможностью определения величины углового перемещения опоры оси Z 15 относительно опоры оси Y 9 и передачи таких данных в пульт управления 3 через кабели связи 5. К опоре оси X 18 разъемно, например, с помощью болтов прикреплена платформа 17, таким образом, что вместе они образуют двухуровневую стойку, выполненную с возможностью установки на платформу 17 и закрепления на ней электронных блоков из состава испытываемых приборов. По центру передней и задней граней (на фигурах не представлены) опоры оси Z 15, перпендикулярно к оси Z, выполнены симметричные отверстия (на фигурах не представлены), в которые через подшипники 14 установлена опора оси X 18, таким образом, что ось вращения опоры X 18 проходит через точку пересечения осей вращения опор оси Y 9 и опоры оси Z 15. На наружной плоскости одной из боковых граней опоры оси Z 15 жестко, например, с помощью болтового соединения закреплен привод оси X 19, выполненный с возможностью формирования и передачи углового вращения по оси X на опору оси X 18. На одной из боковых граней опоры оси Z 15 жестко, например, с помощью болтового соединения закреплен датчик угла 13, выполненный с возможностью определения величины углового перемещения опоры оси X 19 относительно опоры оси Z 15 и передачи таких данных в пульт управления 3 через кабели связи 5. К верхней плоскости опоры оси X 18 разъемно, например, с помощью болтов, закреплена установочная площадка 20, в которой выполнены отверстия (на фигурах не представлены), предназначенные для разъемной фиксации на стенде синусоидальных колебаний испытываемого прибора и для прокладки кабелей между испытываемым прибором и его электронными блоками, закрепляемыми на платформе 17. Привод оси Y 13, привод оси Z 15, привод оси X 19 и датчики угла 13 с помощью кабелей питания 4 подключены к блоку питания 22 стойки управления 2. Привод оси Y 13 с помощью кабеля связи 5 подключен к блоку формирования угловых колебаний по оси Y 24 стойки управления 2. Привод оси X 19 с помощью кабеля связи 5 подключен к блоку формирования угловых колебаний по оси X 23 стойки управления 2. Привод оси Z 15 с помощью кабеля связи 5 подключен к блоку формирования угловых колебаний по оси Z 25 стойки управления 2.
Привод оси Y 12, привод оси Z 15 и привод оси X 19 имеют идентичную конструкцию и состоят из рычага 26, который жестко, например, болтами и штифтами закреплен с соответствующей опорой оси и кривошипа 27, выполненного с возможностью регулировки амплитуды качения через регулируемое отклонение пальца кривошипа 28 от оси вращения кривошипа 27. Кривошип 27 через червячный механизм 29 и редуктор 30 соединен с электродвигателем 31. При этом рычаг 26, кривошип 27, палец кривошипа 28, червячный механизм 29, редуктор 30 и электродвигатель 31 размещены внутри защитного кожуха 32.
Стойка управления 2 содержит (фиг. 5) корпус 21, блок питания 22, блок формирования угловых колебаний по оси X 23, блок формирования угловых колебаний по оси Y 24, блок формирования угловых колебаний по оси Z 25.
Пульт управления 3 с помощью кабелей питания 4 подключен к блоку питания 22 стойки управления 2. Пульт управления 3 с помощью кабелей связи 5 подключен к датчикам угла 13.
Выполнение стоек 6 с возможностью амортизации вибраций и регулирования по высоте позволяет установить в требуемое, например, горизонтальное положение основание 7, что позволяет исключить ошибки точности измерений в ходе испытаний, которые могут возникнуть вследствие установки электромеханической части 1 на основание, имеющее угол наклона, и повысить устойчивость электромеханической части 1 в целом, при этом одновременно исключить ошибки точности измерений в ходе испытаний, которые могут возникнуть вследствие влияния внешних вибраций, вызванных, например сейсмической активностью, движением транспорта, либо работой промышленного оборудования. Исключение ошибок точности измерений в совокупности значительно повышает точность результатов испытаний в целом.
Выполнение привода оси Y 12, привода оси X 19 и привода оси Z 16, идентичной конструкции, в которую входит кривошип 27, выполненный с возможностью регулировки амплитуды качения позволяет задавать индивидуальное значение амплитуды качения по каждой из осей, в том числе учитывать частоту вибраций носителя испытываемого прибора, в том числе резонансные частоты, присущие такому носителю, что повышает точность результатов испытаний в целом, так как расширяет диапазон возможных режимов испытаний и позволяет проводить испытания в режимах, максимально приближенных к режимам реальной эксплуатации испытываемых изделий. При этом кривошип 27 выполнен таким образом, что минимальное значение амплитуды качения, может быть задано равным 0.
Выполнение стойки управления 2, в виде отдельного модуля, который содержит корпус 21, блок питания 22, блок формирования угловых колебаний по оси X 23, блок формирования угловых колебаний по оси Y 24, блок формирования угловых колебаний по оси Z 25 упрощает настройку стенда синусоидальных колебаний и его эксплуатацию, в том числе непосредственно во время проведения испытаний, и дальнейшее сервисное обслуживание.
Блок формирования угловых колебаний по оси X 23, блок формирования угловых колебаний по оси Y 24, блок формирования угловых колебаний по оси Z 25 выполнены с возможностью индивидуального изменения периода колебаний по каждой из осей за счет формирования законов изменения скорости вращения для каждого из электродвигателей 31, входящих в состав соответственно привода оси Y 12, привода оси X 19 и привода оси Z 16. При этом задают параметры и контролируют исполнение такого закона изменения периода колебаний с помощью пульта управления 3. Данное техническое решение позволяет динамически в ходе испытаний менять период колебаний независимо для каждой из осей в рамках заданной амплитуды качения, а также повышает точность и достоверность результатов испытаний в целом за счет создания режимов во время таких испытаний, максимально приближенных к режимам реальной эксплуатации испытываемых изделий.
Выполнение установочной площадки 20 съемной упрощает размещение испытываемых приборов на стенде синусоидальных колебаний, а также позволяет изготавливать и устанавливать установочные площадки, совместимые с любыми видами, как существующих, так и перспективных приборов.
Закрепление на опоре оси X 18 платформы 17, таким образом, что вместе они образуют двухуровневую стойку, выполненную с возможностью установки на платформу 17 и закрепления на ней электронных блоков из состава испытываемых приборов позволяет одновременно с испытанием части прибора, содержащей оптические каналы, например ТВ-камеру, производить в идентичном режиме и испытания внешних модулей прибора, например, вычислителя, что сокращает совокупное время проведения испытаний и позволяет избежать ошибок измерений в ходе испытаний, которые могут возникнуть вследствие различий в режимах при проведении испытаний части прибора, содержащей оптические каналы отдельно от испытаний внешних модулей такого прибора.
Установка опоры оси X, опоры оси Y и опоры оси Z таким образом, что их оси вращения имеют одну общую точку, позволяет упростить процедуру вычислений, необходимых для определения и формирования режимов испытаний, а также исключить возможные ошибки, которые могут возникнуть в ходе таких расчетов, что повышает точность испытаний в целом.
Подключение стойки управления 2 к электромеханической части 1 с помощью кабелей питания 4 и кабелей связи 5, также как и подключение датчиков угла 13 электромеханической части 1 к пульту управления 3 с помощью кабелей связи 5, и подключение пульта управления 3 с помощью кабелей питания 4 к блоку питания 22 стойки управления 2 позволяет упростить конструкцию стенда синусоидальных колебаний в целом, при этом одновременно обеспечить надежную связь для передачи сигналов и энергии между его компонентами.
В целях проведения сравнительных испытаний было изготовлено три образца стенда синусоидальных колебаний, различия между которыми заключались в количестве стоек электро-механической части. При этом для каждого образца стойки были выполнены идентичной конструкции и размеров. Первый образец содержал три таких стойки, второй - четыре, третий - восемь.
В остальном все три образца стенда синусоидальных колебаний имели идентичную конструкцию, содержащую электромеханическую часть 1, стойку управления 2 и пульт управления 3, при этом стойка управления 2 соединялась с электромеханической частью 1 и пультом управления 3 с помощью кабелей питания 4 и кабелей связи 5, а электромеханическая часть 1 соединялась с пультом управления 3 с помощью кабелей связи 5.
Электромеханическая часть 1 каждого из образцов стенда содержит стоики 6 (первый образец содержит три стойки 6; второй образец - четыре стойки 6; третий образец - восемь стоек 6), каждая из которых выполнена с возможностью амортизации вибраций между электромеханической частью 1 и поверхностью, на которую электромеханическая часть 1 установлена, и с возможностью регулирования по высоте. К верхней части стоек 6 жестко с помощью болтового соединения закреплено основание 7. Верхняя центральная часть основания 7 жестко с помощью болтового соединения соединена с нижней частью упорного погонного подшипника 8, при этом верхняя часть погонного подшипника 8 жестко с помощью болтового соединения соединена с нижней частью 10 опоры оси Y 9, состоящей из нижней части 10 и стоек 11. Снизу к основанию 7 жестко с помощью болтового соединения прикреплен привод оси Y 12, выполненный с возможностью формирования и передачи углового вращения по оси Y на опору оси Y 9. Кроме того, снизу к основанию 7 жестко с помощью болтового соединения прикреплен датчик угла 13, выполненный с возможностью определения величины углового перемещения опоры оси Y 9 относительно основания 7 и передачи таких данных в пульт управления 3 через кабели связи 5. При этом датчик угла 13 представляет собой высокоточный датчик (энкодер) углового перемещения. В верхней части стоек 11 симметрично на одном уровне относительно нижней части 10 выполнены отверстия (на фигурах не представлены), в которые через подшипники 14 установлена опора оси Z 15 таким образом, что центр опоры оси Z 15 расположен на оси Y таким образом, что оси вращения опор Y и Z лежат в одной плоскости. На наружной плоскости одной из стоек 11 жестко с помощью болтового соединения закреплен привод оси Z 16, выполненный с возможностью формирования и передачи углового вращения по оси Z на опору оси Z 15. Кроме того, на одной из стоек 11 жестко с помощью болтового соединения, закреплен датчик угла 13, выполненный с возможностью определения величины углового перемещения опоры оси Z 15 относительно опоры оси Y 9 и передачи таких данных в пульт управления 3 через кабели связи 5. К опоре оси X 18 с помощью болтов прикреплена платформа 17, таким образом, что вместе они образуют двухуровневую стойку, выполненную с возможностью установки на платформу 17 и закрепления на ней электронных блоков из состава испытываемых приборов. По центру передней и задней граней (на фигурах не представлены) опоры оси Z 15, перпендикулярно к оси Z, выполнены симметричные отверстия (на фигурах не представлены), в которые через подшипники 14 установлена опора оси X 18, таким образом, что ось вращения опоры X 18 проходит через точку пересечения осей вращения опор оси Y 9 и опоры оси Z 15. На наружной плоскости одной из боковых граней опоры оси Z 15 жестко с помощью болтового соединения закреплен привод оси X 19, выполненный с возможностью формирования и передачи углового вращения по оси X на опору оси X 18. На одной из боковых граней опоры оси Z 15 жестко с помощью болтового соединения закреплен датчик угла 13, выполненный с возможностью определения величины углового перемещения опоры оси X 19 относительно опоры оси Z 15 и передачи таких данных в пульт управления 3 через кабели связи 5. К верхней плоскости опоры оси X 18 разъемно с помощью болтов, закреплена установочная площадка 20, в которой выполнены отверстия (на фигурах не представлены), предназначенные для разъемной фиксации на стенде синусоидальных колебаний испытываемого прибора и для прокладки кабелей между испытываемым прибором и его электронными блоками, закрепляемыми на платформе 17. Привод оси Y 13, привод оси Z 15, привод оси X 19 и датчики угла 13 с помощью кабелей питания 4 подключены к блоку питания 22 стойки управления 2. Привод оси Y 13 с помощью кабеля связи 5 подключен к блоку формирования угловых колебаний по оси Y 24 стойки управления 2. Привод оси X 19 с помощью кабеля связи 5 подключен к блоку формирования угловых колебаний по оси X 23 стойки управления 2. Привод оси Z 15 с помощью кабеля связи 5 подключен к блоку формирования угловых колебаний по оси Z 25 стойки управления 2.
Привод оси Y 12, привод оси Z 15 и привод оси X 19 имеют идентичную конструкцию и состоят из рычага 26, который жестко болтами и штифтами закреплен с соответствующей опорой оси и кривошипа 27, выполненного с возможностью регулировки амплитуды качения через регулируемое отклонение пальца кривошипа 28 от оси вращения кривошипа 27. Кривошип 27 через червячный механизм 29 и редуктор 30 соединен с электродвигателем 31. При этом рычаг 26, кривошип 27, палец кривошипа 28, червячный механизм 29, редуктор 30 и электродвигатель 31 размещены внутри защитного кожуха 32.
Стойка управления 2 содержит корпус 21, блок питания 22, блок формирования угловых колебаний по оси X 23, блок формирования угловых колебаний по оси Y 24, блок формирования угловых колебаний по оси Z 25.
Пульт управления 3 с помощью кабелей питания 4 подключен к блоку питания 22 стойки управления 2. Пульт управления 3 с помощью кабелей связи 5 подключен к датчикам угла 13. Пульт управления 3 2 с помощью кабелей связи 5 подключен к блоку формирования угловых колебаний по оси Y 24, блоку формирования угловых колебаний по оси X 23 и блоку формирования угловых колебаний по оси Z 25, входящих в состав стойки управления 2.
Стенд синусоидальных колебаний используют следующим образом.
Стенд синусоидальных колебаний устанавливают на прочную ровную поверхность. Осуществляют подключение стойки управления 2 с электромеханической частью 1 и пультом управления 3 с помощью кабелей питания 4 и кабелей связи 5, а электромеханической части 1 с пультом управления 3 с помощью кабелей связи 5, а именно:
- привод оси Y 13, привод оси Z 15, привод оси X 19 и датчики угла 13, входящие в состав электромеханической части 1, с помощью кабелей питания 4 подключают к блоку питания 22 стойки управления 2;
- привод оси Y 13, входящий в состав электромеханической части 1, с помощью кабеля связи 5 подключают к блоку формирования угловых колебаний по оси Y 24 стойки управления 2;
- привод оси X 19, входящий в состав электромеханической части 1, с помощью кабеля связи 5 подключают к блоку формирования угловых колебаний по оси X 23 стойки управления 2;
- привод оси Z 15, входящий в состав электромеханической части 1, с помощью кабеля связи 5 подключают к блоку формирования угловых колебаний по оси Z 25 стойки управления 2;
- датчики угла 13, входящие в состав электромеханической части 1, с помощью кабелей связи 5 подключают к пульту управления 3;
- блок формирования угловых колебаний по оси Y 24, блок формирования угловых колебаний по оси X 23 и блок формирования угловых колебаний по оси Z 25, входящие в состав стойки управления 2, с помощью кабелей связи 5 подключают к пульту управления 3;
- пульт управления 3 с помощью кабелей питания 4 подключают к блоку питания 22 стойки управления 2.
После чего осуществляют регулирование стоек 6 таким образом, чтобы основание 7 располагалось в определенной программой испытаний плоскости, например, горизонтальной.
После чего осуществляют включение стенда и с помощью пульта управления 3 и проверяют наличие связи между пультом управления 3 и соединенными с помощью кабелей связи 5 компонентами электромеханической части 1 и стойки управления 2.
После чего от опоры оси X 18 электромеханической части 1 отсоединяют установочную площадку 20.
После чего, на установочной площадке 20 закрепляют прибор, в отношении которого планируется проведение испытаний с помощью стенда синусоидальных колебаний. В случае, если такой прибор помимо части, содержащей оптические каналы, например ТВ-камеру, содержит внешние модули, например, вычислитель, такие модули устанавливают и закрепляют на платформе 17 электромеханической части 1.
После чего установочную площадку 20 с закрепленным на ней прибором, закрепляют на опоре оси X 18 электромеханической части 1. После чего, в случае, если на платформе 17 были закреплены внешние модули прибора, осуществляют их подключение к части прибора, содержащей оптические каналы.
После чего с помощью кривошипов 27, выполненных с возможностью регулировки амплитуды качения индивидуально для привода оси Y 12, привода оси X 19 и привода оси Z 16 задают значение амплитуды качения по каждой из осей.
После чего осуществляют необходимые испытания прибора, при этом с помощью блока формирования угловых колебаний по оси Y 24, блока формирования угловых колебаний по оси X 23 и блока формирования угловых колебаний по оси Z 25, индивидуально для каждого из электродвигателей 31, соответственно входящих в состав привода оси Y 12, привода оси X 19 и привода оси Z 16, в соответствии с программой испытаний, изменяют скорость вращения, определяя таким образом интенсивность (период) угловых колебаний в рамках заданной амплитуды качения индивидуально по каждой из осей, при этом задают и контролируют исполнение закона интенсивности (периода) колебаний с помощью пульта управления 3.
После чего стенд синусоидальных колебаний выключают.
После чего от установочной площадки 20 отсоединяют прибор, а в случае, если на платформе 17 были закреплены его внешние модули, такие внешние модули также отсоединяют от платформы 17, а сам стенд синусоидальных колебаний приводят в состояние, предшествующее отсоединению от опоры оси X 18 установочной площадки 20 в целях закрепления на ней испытуемого прибора.
В результате испытаний было установлено, что все три образца стенда синусоидальных колебаний имеют преимущества по сравнению с ближайшим аналогом (прототипом), а именно:
- позволяют проводить испытания по трем осям (у прототипа - только по двум);
- исключают внешние воздействия на объект во время проведения испытаний (у прототипа данная возможность отсутствует);
- позволяют регулировать и амплитуду, и период качения индивидуально для каждой из трех осей (у прототипа возможна регулировка только периода качения).
При этом было установлено, что увеличение массы испытываемого прибора требует увеличения количества стоек 6, так как увеличение массы испытываемого прибора, например при проведении испытаний изделий разного класса, негативно влияет на возможность амортизации внешних вибраций с помощью таких стоек, так как увеличивается нагрузка непосредственно на амортизаторы.
Заявленное техническое решение обладает универсальностью и эксплуатационной надежностью, является результатом экспериментальных исследований и может применяться для испытаний систем стабилизации широкого ряда приборов по трем осям с высокой точностью и возможностью установки как требуемой амплитуды, так и периода качения независимо по каждой из трех осей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ СТАБИЛИЗАЦИИ ОПТИКО-ЭЛЕКТРОННЫХ СИСТЕМ | 2024 |
|
RU2827493C1 |
| ДВУХОСНЫЙ ПОВОРОТНЫЙ СТЕНД | 2018 |
|
RU2684419C1 |
| ДИНАМИЧЕСКИЙ ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2014 |
|
RU2554198C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ СТАТО - ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ФИЗИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2562445C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРОВ МАСС И МОМЕНТОВ ИНЕРЦИИ ИЗДЕЛИЙ | 2022 |
|
RU2797387C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССО-ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК ИЗДЕЛИЯ | 2013 |
|
RU2562273C2 |
| СПОСОБ ИСПЫТАНИЙ МОДЕЛИ МОРСКОГО ИНЖЕНЕРНОГО СООРУЖЕНИЯ В ЛЕДОВОМ ОПЫТОВОМ БАССЕЙНЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2279654C1 |
| Гиростабилизированная система стабилизации полезной нагрузки беспилотного воздушного судна | 2021 |
|
RU2762217C1 |
| Стенд для испытаний одноковшовых экскаваторов | 1987 |
|
SU1469032A1 |

Заявленное техническое решение относится к испытательному оборудованию, в частности к испытательному оборудованию для проверки приборов, работающих в условиях качки, например закрепляемых на подвижном носителе. Стенд синусоидальных колебаний содержит электромеханическую часть, стойку управления и пульт управления, при этом электромеханическая часть содержит не менее трех стоек, основание, опору оси Y, опору оси Z, опору оси X, датчики угла, привод оси Y, привод оси X и привод оси Z, и установочную площадку, причем каждая из стоек электромеханической части выполнена с возможностью амортизации вибраций и регулирования по высоте, привод оси Y, привод оси X и привод оси Z имеют идентичную конструкцию, при этом каждый из приводов содержит кривошип, выполненный с возможностью индивидуальной регулировки амплитуды качания, а стойка управления содержит блок формирования угловых колебаний по оси X, блок формирования угловых колебаний по оси Y, блок формирования угловых колебаний по оси Z, выполненные с возможностью индивидуального изменения периода колебаний по каждой из осей. Технический результат – возможность осуществления испытания систем стабилизации широкого ряда оптико-электронных приборов по трем осям с высокой точностью и возможностью установки требуемой амплитуды и периода качания независимо по каждой из трех осей. 6 з.п. ф-лы, 5 ил.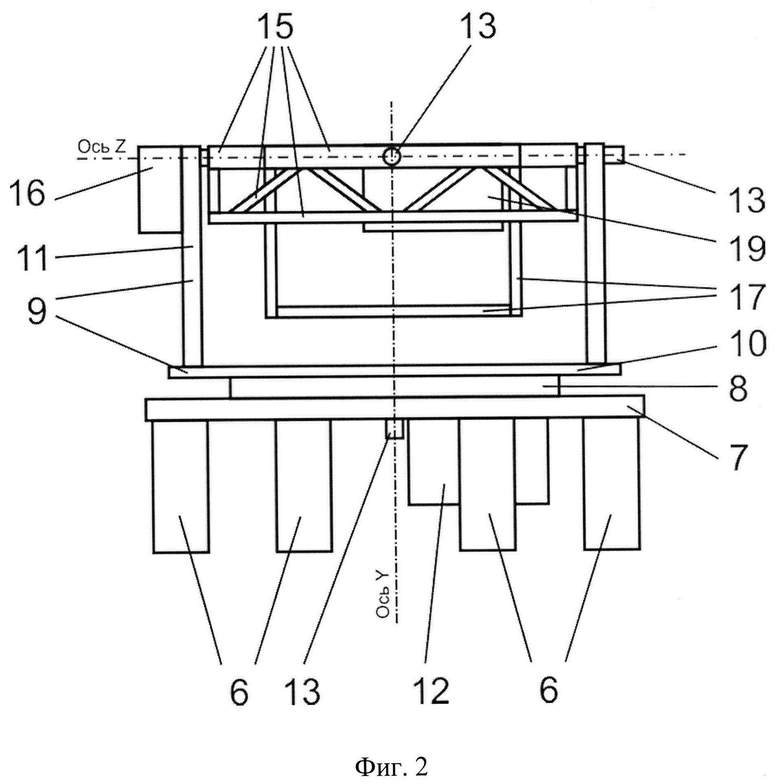
1. Стенд синусоидальных колебаний, содержащий электромеханическую часть, стойку управления и пульт управления, при этом электромеханическая часть содержит не менее трех стоек, основание, опору оси Y, опору оси Z, опору оси X, датчики угла, привод оси Y, привод оси X и привод оси Z, и установочную площадку, отличающийся тем, что каждая из стоек электромеханической части выполнена с возможностью амортизации вибраций и регулирования по высоте, привод оси Y, привод оси X и привод оси Z имеют идентичную конструкцию, при этом каждый из приводов содержит кривошип, выполненный с возможностью индивидуальной регулировки амплитуды качания, а стойка управления содержит блок формирования угловых колебаний по оси X, блок формирования угловых колебаний по оси Y, блок формирования угловых колебаний по оси Z, выполненные с возможностью индивидуального изменения периода колебаний по каждой из осей.
2. Стенд по п. 1, отличающийся тем, что стойка управления соединена с электромеханической частью и пультом управления с помощью кабелей питания и кабелей связи.
3. Стенд по п. 1, отличающийся тем, что электромеханическая часть соединена с пультом управления с помощью кабелей связи.
4. Стенд по п. 1, отличающийся тем, что пульт управления с помощью кабелей питания подключен к блоку питания стойки управления, а с помощью кабелей связи - к датчикам угла электромеханической части.
5. Стенд по п. 1, отличающийся тем, что установочная площадка выполнена съемной.
6. Стенд по п. 1, отличающийся тем, что к опоре оси X прикреплена платформа таким образом, что вместе они образуют двухуровневую стойку, выполненную с возможностью установки на платформу и закрепления на ней электронных блоков из состава испытываемых приборов.
7. Стенд по п. 1, отличающийся тем, что опора оси X установлена таким образом, что ось вращения опоры X проходит через точку пересечения осей вращения опор оси Y и опоры оси Z.
| СПОСОБ ПОЛУЧЕНИЯ КАТАЛИЗАТОРА ОКИСЛЕНИЯПАРАФИНА | 0 |
|
SU202079A1 |
| ДВУХСТЕПЕННОЙ СТЕНД ДЛЯ ЗАДАНИЯ УГЛОВЫХ КОЛЕБАНИЙ | 2007 |
|
RU2367921C2 |
| СПОСОБ ФОРМОВКИ СПИРАЛЬНОШОВНЫХ ТРУБ | 0 |
|
SU203608A1 |
| НИЗКОЧАСТОТНЫЙ ВИБРОСТЕНД | 1991 |
|
RU2032158C1 |

