Изобретение относится к устройствам для автоматизированного наплавления битумно-полимерных материалов на различные поверхности и может быть применено в строительной области для гидроизоляции кровли, стен, фундамента, резервуаров с водой, цоколя и перекрытий.
Известна сварочная машина для соединения перехлестывающихся рулонов материала [RU 2615739 C1]. Сварочная машина для соединения по кромке перехлестывающихся рулонов материала содержит шасси, на котором расположены по меньшей мере направляющие ролики, устройство нагрева и по меньшей мере один прижимной ролик. Устройство нагрева имеет расположенный сбоку элемент контактного нагрева, который может быть вставлен между кромками рулонов материала. Шасси приводится в движение посредством электрического механизма, в качестве которого использован бесщеточный двигатель постоянного тока, предпочтительно дисковый роторный, а в качестве понижающей передачи - планетарная передача. Электрический механизм и понижающая передача объединены в барабанный приводной механизм. Шасси имеет боковую ножку, выполненную регулируемой перпендикулярно рабочему направлению относительно продольной ножки.
Недостатками известной сварочной машины для соединения перехлестывающихся рулонов материала являются: возможность соединения только части материала, который перехлестывается; отсутствие возможности наплавления материала на какие-либо другие поверхности.
Наиболее близким решением, принятым за прототип, является устройство для наплавления, представленное в виде набора оборудования, используемого для наплавления битумных рулонных материалов, раскрытое в материале [https://nav.tn.ru/knowledge-base/materialy/gidroizolyatsiya/bitumnye-rulonnye-materialy/montazh-brm-v-ploskoy-krovle/montazh-krovli-iz-bitumnykh-rulonnykh-materialov-tekhnoelast-oborudovanie-i-instrumenty/]. Устройство включает: электрообогреватель для газовых баллонов; шланг газовый; газовый редуктор с манометром; горелка; крючок для раскатывания рулонов; ролик прижимной.
Признаки прототипа, являющиеся общими с заявляемым устройством для наплавления битумно-полимерных рулонных материалов на поверхность: электрообогреватель для газовых баллонов; шланг газовый; газовый редуктор с манометром; горелка; ролик прижимной.
Недостаток прототипа: необходимо вручную производить наплавление рулонных материалов на поверхность.
Задачей изобретения является разработка устройства для наплавления битумно-полимерных рулонных материалов на поверхность, позволяющего автоматизированно производить наплавление рулонных материалов на поверхность.
Решение этой задачи является актуальным в связи с увеличением строительства жилых и коммерческих помещений, кровля которых состоит из битумно-полимерных рулонных материалов. На сегодняшний день процесс наплавления битумно-полимерных рулонных материалов на поверхность кровли не автоматизирован. Строительным кампаниям требуется привлекать множество сотрудников для осуществления этого процесса. Автоматизация процесса наплавления битумно-полимерных рулонных материалов на поверхность кровли позволит повысить эффективность строительных компаний.
Поставленная задача была решена за счет того, что известное устройство для наплавления битумно-полимерных рулонных материалов на поверхность, включающее горелку, газовый редуктор с манометром, шланг газовый, ролик прижимной, согласно изобретению дополнительно содержит корпус, включающий вал для рулонного материала, выполненный с возможностью насаждения рулонного материала на него и имеющий возможность свободно поворачиваться вокруг своей оси, закрепленный на подшипниках, которые прикреплены к корпусу;
двигатель перемещения зажимного перемещающегося вала, закрепленный на корпусе и выполненный с возможностью перемещать держатель подшипников, при этом на держателе подшипников закреплены подшипники, на которых закреплен зажимной перемещающийся вал, выполненный с возможностью свободно поворачиваться вокруг своей оси;
двигатель поворота зажимного не перемещающего вала, выполненный с возможностью вращать не перемещающийся вал, при этом зажимной не перемещающийся вал с одной стороны удерживается за счет двигателя поворота зажимного не перемещающего вала, а с другой стороны за счет подшипника;
при этом зажимной перемещающийся вал и зажимной не перемещающийся вал имеют рифленую поверхность, достаточную для того, чтобы материал не проскальзывал между ними;
блок перемещения горелки, оснащенный реечной передачей, двигателем, и выполненный с возможностью перемещения горелки вдоль не перемещающего вала, при этом к горелке подсоединен шланг газовый, а к газовому шлангу подсоединен газовый редуктор с манометром, а газовый редуктор с манометром соединен с газовым баллоном;
блок крепления пружин, пружины, при этом пружины, с одной стороны, прикреплены к блоку крепления пружин, а с другой стороны к ролику прижимному, при этом в корпусе имеется выступ для беспрепятственного выпирания ролика прижимного из корпуса;
двигатель перемещения корпуса, связанный с передними колесами и выполненный с возможностью перемещать корпус, направляющий двигатель, связанный с задним колесом и выполненный с возможностью изменить угол поворота заднего колеса;
аккумулятор, программируемый логический контроллер, в который заложены интеллектуальные алгоритмы для распознавания вида поверхности и возможность выдачи управляющих воздействий на все исполнительные механизмы устройства, пульт управления, выполненный с возможностью задания пользователями режимов работы устройства, камеры, выполненные с возможностью фиксировать и передавать в реальном режиме времени видеопоток на программируемый логический контроллер.
Отличительные признаки предлагаемого устройства – корпус; вал для рулонного материала; подшипники; двигатель перемещения зажимного перемещающегося вала; держатель подшипников; зажимной перемещающийся вал; двигатель поворота зажимного не перемещающего вала; зажимной не перемещающийся вал; подшипник; блок перемещения горелки; газовый баллон; блок крепления пружин; пружины; двигатель перемещения корпуса; передние колеса; направляющий двигатель; заднее колесо; аккумулятор; программируемый логический контроллер; пульт управления; камеры.
Отличительные признаки в совокупности с известными позволяют автоматизированно производить наплавление рулонных материалов на поверхность.
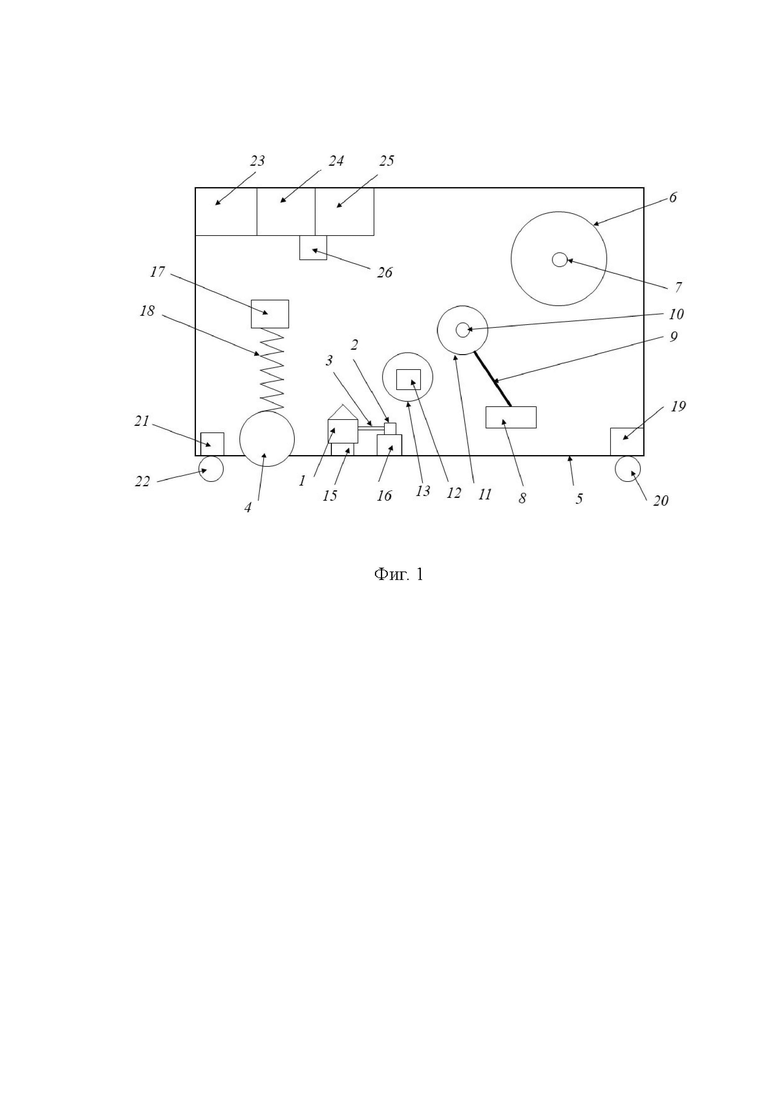
На фиг. 1 представлена модель устройства (вид сбоку).
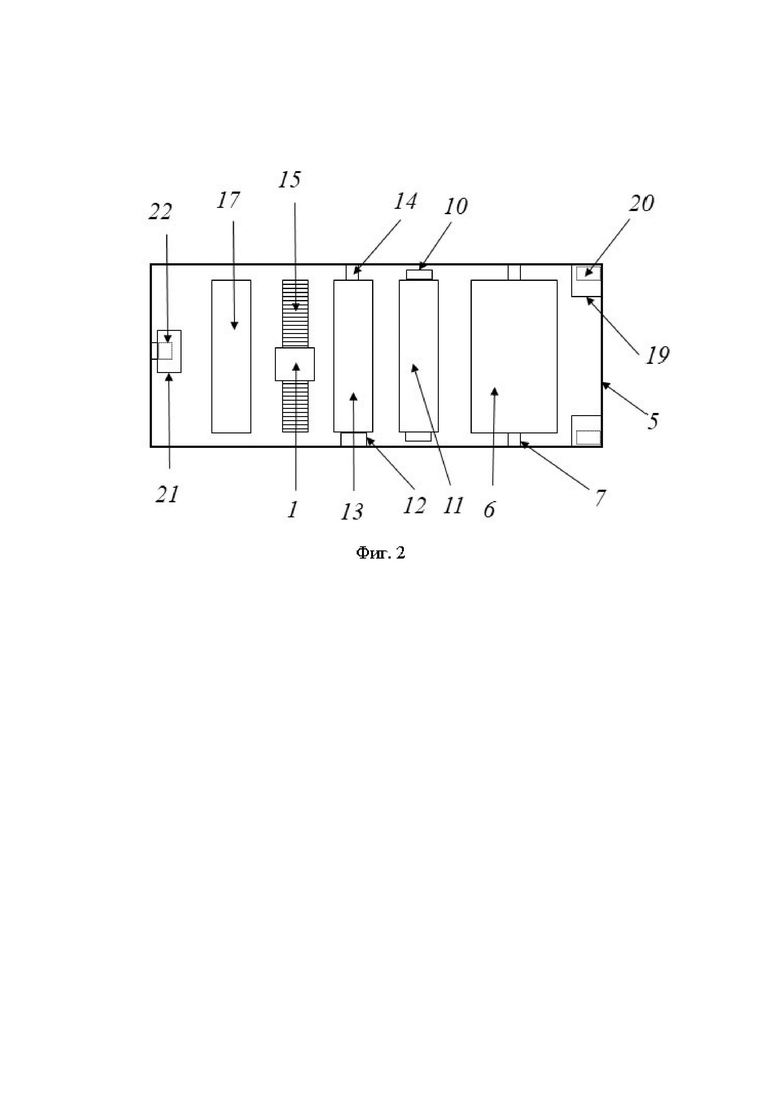
На фиг. 2 представлена модель устройства (вид сверху).
Устройство для наплавления битумно-полимерных рулонных материалов на поверхность содержит горелку 1, газовый редуктор с манометром 2, шланг газовый 3, ролик прижимной 4, корпус 5 (фиг. 1, 2).
Корпус 5 содержит вал для рулонного материала 6, выполненный с возможностью насаждения рулонного материала на него и имеющий возможность свободно поворачиваться вокруг своей оси, закрепленный на подшипниках 7, которые прикреплены к корпусу 5.
Корпус 5 содержит двигатель перемещения зажимного перемещающегося вала 8, закрепленный на корпусе 5 и выполненный с возможностью перемещать держатель подшипников 9, при этом на держателе подшипников 9 закреплены подшипники 10, на которых закреплен зажимной перемещающийся вал 11, выполненный с возможностью свободно поворачиваться вокруг своей оси.
Корпус 5 содержит двигатель поворота зажимного не перемещающего вала 12, выполненный с возможностью вращать не перемещающийся вал 13, при этом зажимной не перемещающийся вал 13 с одной стороны удерживается за счет двигателя поворота зажимного не перемещающего вала 12, а с другой стороны за счет подшипника 14 . Зажимной перемещающийся вал 11 и зажимной не перемещающийся вал 13 имеют рифленую поверхности, достаточную для того, чтобы материал не проскальзывал между ними.
Корпус 5 содержит блок перемещения горелки 15, оснащенный реечной передачей, двигателем, и выполненный с возможностью перемещения горелки 1 вдоль не перемещающего вала 13, при этом к горелке 1 подсоединен шланг газовый 3, а к газовому шлангу 3 подсоединен газовый редуктор с манометром 2, а газовый редуктор с манометром 2 соединен с газовым баллоном 16.
Корпус 5 содержит блок крепления пружин 17, пружины 18, при этом пружины 18, с одной стороны, прикреплены к блоку крепления пружин 17, а с другой стороны к ролику прижимному 4, при этом в корпусе 5 имеется выступ для беспрепятственного выпирания ролика прижимного 4 из корпуса 5.
Корпус 5 содержит двигатель перемещения корпуса 19, связанный с передними колесами 20 и выполненный с возможностью перемещать корпус 5, направляющий двигатель 21, связанный с задним колесом 22 и выполненный с возможностью изменить угол поворота заднего колеса 22.
Корпус 5 содержит аккумулятор 23, программируемый логический контроллер 24, в который заложены интеллектуальные алгоритмы для распознавания вида поверхности и возможность выдачи управляющих воздействий на все исполнительные механизмы устройства, пульт управления 25, выполненный с возможностью задания пользователями режимов работы устройства, камеры 26, выполненные с возможностью фиксировать и передавать в реальном режиме времени видеопоток на программируемый логический контроллер 24.
Устройство работает следующим образом. Сначала пользователь устройства подготавливает поверхность, на которую планируется наплавление рулонного материала. Затем пользователь насаживает рулонный материал на вал для рулонного материала 6 и протаскивает материал до поверхности не перемещающегося вала 13. После чего на пульте управления 25 выбирает необходимый режим работы. Режимы работы могут различаться по скорости перемещения устройства, температуры подогрева и необходимого расстояния. Пульт управления и все остальные электронные приборы, и исполнительные механизмы берут энергию из аккумулятора 23. Аккумулятор 23 может быть как съемным, так и подзаряжаемым непосредственно в устройстве. После чего пользователь устанавливает устройство в том месте, откуда необходимо начать наплавление и на пульте управления 25 запускает устройство в работу.
В программируемый логический контроллер (далее ПЛК) 24 поступает информация с камер 26. Алгоритмы ПЛК распознают наличие поверхности в виде другого битумно-полимерного материала и если она имеется, то определяется соотношение ширины материала и основной поверхности. Это нужно, чтобы в дальнейшем корректировать движение устройства, соблюдая одинаковое соотношение на всем протяжении работы. Распознавание происходит за счет алгоритмов, в которые могут быть встроены модели сверточных нейронных сетей.
Затем ПЛК выдает управляющие сигналы на двигатель перемещения зажимного перемещающегося вала 8 и перемещающийся вал 11 перемещается к зажимному не перемещающемуся валу 12, зажимая между ними рулонный материал. Поскольку зажимной перемещающийся вал 11 и зажимной не перемещающийся вал 13 имеют рифленые поверхности, достаточные для того, чтобы материал не проскальзывал между ними, то в работу вступает двигатель поворота зажимного не перемещающего вала 12. Он проворачивает зажимной не перемещающийся вал 13 и рулонный материал проворачивается вместе с ним. Затем ПЛК посылает сигналы на газовый редуктор с манометром 2 для установки необходимого давления. После чего в работу вступает блок перемещения горелки 15, который перемещает горелку 1 по ширине всего материала. Таким образом происходит подогрев материала перед его укладыванием на поверхность.
После того как материал достигает поверхности, в работу вступает двигатель перемещения корпуса 19, который перемещает корпус 5, а направляющий двигатель 21 в зависимости от сигналов ПЛК корректирует траекторию движения посредством управления задним колесом 22. Во время перемещения корпуса 5 ролик прижимной 4 с помощью пружин 18 плотно прилегает к поверхности, на которой нанесен рулонный материал. Благодаря пружинам 18, которые создают большую силу нажатия ролика 4 на поверхность материала все воздушные пузыри разглаживаются. Таким образом происходит наплавление битумно-полимерных материалов на поверхность без участия человека. Человек требуется только для первоначальной настройки устройства и загрузки рулонного материала.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РАЗМОТКИ ИЛИ НАМОТКИ РУЛОНОВ МЕТАЛЛОИЗДЕЛИЙ | 2001 |
|
RU2228229C2 |
| Способ автоматической точечной дуговой сварки и автомат для его осуществления | 1990 |
|
SU1797548A3 |
| АГРЕГАТ ДЛЯ УБОРКИ ТРАВ И СПОСОБ УБОРКИ ТРАВ | 2015 |
|
RU2623485C2 |
| МАШИНА ДЛЯ УКЛАДКИ И ПРИКЛЕИВАНИЯ РУЛОННОГО МАТЕРИАЛА | 1991 |
|
RU2026940C1 |
| Двухдуговая головка для сварки кольцевых швов | 1980 |
|
SU925595A1 |
| Устройство для непрерывного соединения рулонных материалов | 1989 |
|
SU1742089A1 |
| Машина для устройства горизонтальной разметки | 1988 |
|
SU1599462A1 |
| УСТАНОВКА ДЛЯ ОТЛИВКИ ЧУШЕК | 2014 |
|
RU2561540C2 |
| Машина для откачки трубчатых газоразрядных ламп | 1974 |
|
SU528634A1 |
| СПОСОБ И СИСТЕМА НАПЛАВКИ ПОДШИПНИКА | 2008 |
|
RU2469825C2 |
Изобретение относится к устройствам для автоматизированного наплавления битумно-полимерных материалов на различные поверхности и может быть применено в строительной области для гидроизоляции кровли, стен, фундамента, резервуаров с водой, цоколя и перекрытий. Устройство включает горелку, газовый редуктор с манометром, шланг газовый, ролик прижимной. Причем оно содержит корпус, включающий вал для рулонного материала, выполненный с возможностью насаждения рулонного материала на него и имеющий возможность свободно поворачиваться вокруг своей оси, закрепленный на подшипниках, двигатель перемещения зажимного перемещающегося вала, закрепленный на корпусе и выполненный с возможностью перемещения держателя подшипников, на котором закреплены подшипники. При этом зажимной перемещающийся вал, выполненный с возможностью свободно поворачиваться вокруг своей оси, закреплен на подшипниках, двигатель поворота зажимного не перемещающегося вала, который с одной стороны удерживается за счет двигателя поворота зажимного не перемещающего вала, а с другой стороны за счет подшипника, и зажимной перемещающийся вал имеют рифленую поверхность, достаточную для того, чтобы материал не проскальзывал между ними, блок перемещения горелки оснащен реечной передачей, двигателем и выполнен с возможностью перемещения горелки вдоль не перемещающего вала, при этом к горелке подсоединен шланг газовый, а к газовому шлангу подсоединен газовый редуктор с манометром, а газовый редуктор с манометром соединен с газовым баллоном. Далее пружины с одной стороны прикреплены к блоку крепления пружин, а с другой стороны к ролику прижимному, при этом в корпусе имеется выступ для беспрепятственного выпирания ролика прижимного из корпуса. При этом двигатель перемещения корпуса выполнен с возможностью перемещения корпуса, направляющий двигатель выполнен с возможностью изменения угла поворота заднего колеса, программируемый логический контроллер выполнен с возможностью выдачи управляющих воздействий на все исполнительные механизмы устройства. Техническим результатом заявленного изобретения является автоматизированное наплавление рулонных материалов на поверхность. 2 ил.
Устройство для наплавления битумно-полимерных рулонных материалов на поверхность, включающее горелку, газовый редуктор с манометром, шланг газовый, ролик прижимной, отличающееся тем, что содержит корпус, включающий вал для рулонного материала, двигатель перемещения зажимного перемещающегося вала, держатель подшипников, подшипники, зажимной перемещающийся вал, двигатель поворота зажимного не перемещающегося вала, зажимной не перемещающийся вал, блок перемещения горелки, газовый баллон, блок крепления пружин, пружины, двигатель перемещения корпуса, связанный с передними колесами, направляющий двигатель, связанный с задним колесом, аккумулятор, программируемый логический контроллер, в который заложены интеллектуальные алгоритмы для распознавания вида поверхности, пульт управления, выполненный с возможностью задания пользователями режимов работы устройства, и камеры, выполненные с возможностью фиксации и передачи в реальном режиме времени видеопотока на программируемый логический контроллер, при этом вал для рулонного материала выполнен с возможностью насаждения рулонного материала на него и имеет возможность свободно поворачиваться вокруг своей оси, закрепленный на подшипниках, которые прикреплены к корпусу, двигатель перемещения зажимного перемещающегося вала закреплен на корпусе и выполнен с возможностью перемещения держателя подшипников, при этом на держателе подшипников закреплены подшипники, на которых закреплен зажимной перемещающийся вал, выполненный с возможностью свободно поворачиваться вокруг своей оси, двигатель поворота зажимного не перемещающего вала выполнен с возможностью вращения не перемещающего вала, при этом зажимной не перемещающийся вал с одной стороны удерживается за счет двигателя поворота зажимного не перемещающего вала, а с другой стороны за счет подшипника, при этом зажимной перемещающийся вал и зажимной не перемещающийся вал имеют рифленую поверхность, достаточную для того, чтобы материал не проскальзывал между ними, блок перемещения горелки оснащен реечной передачей, двигателем и выполнен с возможностью перемещения горелки вдоль не перемещающего вала, при этом к горелке подсоединен шланг газовый, а к газовому шлангу подсоединен газовый редуктор с манометром, а газовый редуктор с манометром соединен с газовым баллоном, пружины с одной стороны прикреплены к блоку крепления пружин, а с другой стороны к ролику прижимному, при этом в корпусе имеется выступ для беспрепятственного выпирания ролика прижимного из корпуса, двигатель перемещения корпуса выполнен с возможностью перемещения корпуса, направляющий двигатель выполнен с возможностью изменения угла поворота заднего колеса, программируемый логический контроллер выполнен с возможностью выдачи управляющих воздействий на все исполнительные механизмы устройства.
| CN 112848326 A, 28.05.2021 | |||
| СВАРОЧНАЯ МАШИНА ДЛЯ СОЕДИНЕНИЯ ПЕРЕХЛЕСТЫВАЮЩИХСЯ РУЛОНОВ МАТЕРИАЛА | 2015 |
|
RU2615739C1 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ АНТИКОРРОЗИОННОГО ПОКРЫТИЯ НА ПОВЕРХНОСТЬ ТРУБЫ | 2000 |
|
RU2187745C1 |
| Прибор для измерения подуклонки рельсов | 1932 |
|
SU34583A1 |
| CN 112341945 A, 09.02.2021. | |||

