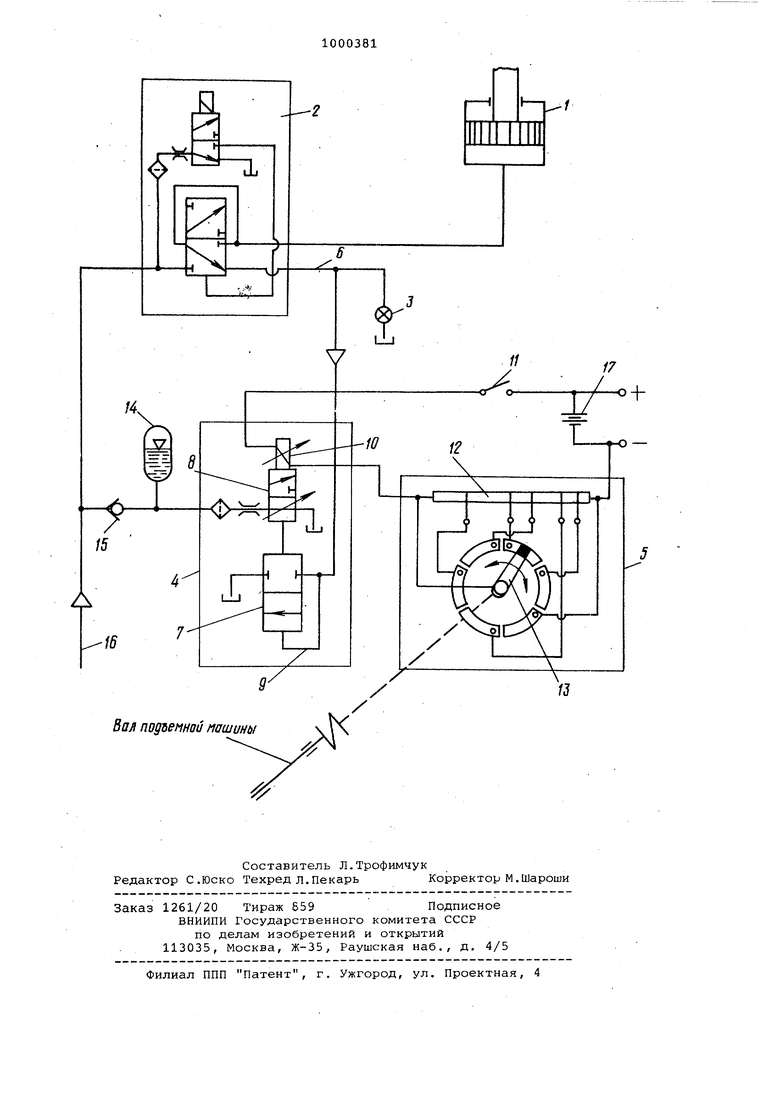
При равенстве давлений или их от сутствия в электрогидравлической ка мере 8 управления и линии 9 обратно связи золотник двухлинейного клапан 7 занимает нейтральное положение, при котором выходной канал б крана 2 предохранительного торможения отсоединяется от сливного канала двух линейного клапана 7. Катушка электромагнита 10 электро гидравлической камеры 8 управления подключена к электрическому источник питания через контакты программного устройства 5 и контакт 11 датчика на правления движения подъемного сосуда 1{не показан). Датчик направления движения подъемного сосуда связан с валом подъемной машины таким образом что при вращении вала машины в сторону подъема груза контакт 11 датчика замкнут, а при вращении вала машины в сторону спуска груза или остановке подъемной машины контакт 11 разомкнут. Программное устройство 5 представ лено в виде набора резисторов 12, шунтируемых подвижным контактом 13, кинематически связанным с валом подъемной машины, например через понижающую зубчатую передачу или другими способами, обеспечивающими не более одного оборота за подъем. Количество резисторов соответствует количеству участков наклонного пути по которому движется подъемный сосуд. Дополнительно устройство снабжено гидравлическим аккумулятором 14 давления и обратньдм клапаном 15, котог рые подсоединены в напорную линию 1 а также резервным источником 17 питания, который включен в электрическую цепь управления катушки электро ,магнита 10 электрогидравлической ка меры 8 управления. В процессе работы подъемной маши при подъеме груза контакт 11 датчик направления движения подъемного сос да замыкается, включая катушку элек ромагнита 10 электрогидравлической камеры 8 управления в цепь электрического источника питания. Подвижный контакт 13 программного устройства 5, кинематически связанный с валом подъемной машин1а, вращаясь, вводит в цепь питания катушки элект ромагнита 10 определенный резистор величина которого соответствует наклону участка пути,-по которому дви жется в данный момент подъемный сосуд, тем самым каждый резистор определяет величину тока в катушке электромагнита 10 на определенном участке пути, по которому двизкется в данный момент подъемный сосуд. В результате в электрогидравлической камере 8 управления двухлинейного клапана 7 вследствие соответствующего подбора диаметров впускного дросселя и выпускного отверстия устанавливается определенное давление. Под действием давления в электрогидравлической камере 8 управления и отсутствия давления в линии 9 обратной связи золотник двухлинейного клапана 7 перемещается из нейтрального положения в сторону дальнейшего перекрытия выходного канала 6 крана 2 предохранительного торможения от сливного канала двухлинейного клапана 7 . В случае аварийного торможения в режиме подъема груза происходит срабатывание крана 2 предохранительного торможения. Тормозной цилиндр 1 соединяется с выходным каналом 6 крана 2 предохранительного торможения, в результате чего в линии 9 обратной связи двухлинейного клапана 7 создается давление, равное давлению в тормозном цилиндре 1. Вследствие того, что давление в линии 9 обратной связи больше, чем давление в электрогидравли.ческой камере 8 управления, золотник двухлинейного клапана 7 под действием давления в линии 9 обратной связи, перемещаясь, соединяет выходной канал 6 крана 2 предохранительного торможения со сливным каналом. В результате рабочая жидкость из тормозного цилиндра 1 поступает на слив одновременно по двум направл ни м: интенсивно через двухлинейный клапан 7 и замедленно через дроссель 3 . Интенсивное истечение рабочей жидкости из тормозного цилиндра 1 на слив через двухлинейный клапан 7 происходит до тех .пор, пока давление в тормозном цилиндре 1, а следовательно, и в линии 9 обратной связи не станет равным давлению в электрогидравлической камере 8 управления, после чего золотник двухлинейного клапана 7 возвращается в нейтральное положение и отсоединяет выходной канал 6 крана 2 предохранительного тормой ения от сливного канала. В результате выпуск рабочегй жидкости из тормозного цилиндра 1 через двухлинейный клапан 7 на слив прекращается .в тормозном цилиндре 1 устанавливается давление рабочей жидкости, которое соответствует тормозному моменту,необходимому для торможения подъемной машины с безопасной величиной замедления на данном участке наклонного пути tl-я ступень торможения) . Дальнейший выпуск рабочей жидкости из тормозного цилиндра 1 медленно продолжается только через дроссель 3. Подъемная машина эамедляс-юя и при
скорости близкой к нулю и полной остановке машины контакт 11 датчика направления движения подъемного сосуда размыкается и катушка электромагнита 10 обесточивается. Давление в электрогидравлической камере 8 управ ления исчезает и золотник двухлинейного клапана 7 под действием давления рабочей жидкости в линии 9 обратной связи, перемещаясь из нейтралного положения, соединяет выходной канал б крана предохранительного торможения со сливным каналом. Поэтому окончательный выпуск оставшейся рабочей жидкости из тормозного цилиндра 1 происходит интенсивно через двухлинейный клапан 7 и замеДлённо через дроссель 3, вследствие чего подъемная машина тормозится мопным тормозным моментом с требуемым коэффициентом статической надежности ( 2-я ступень торможения ).
На случай общего снятия напряжения в электрической цепи управления во время предохранительного тормо-, жения для гидравлической подпитки камеры 8 управления и электрического питания катушки электромагнита 10 применены соответственно гидравлический аккумулятор 14 давления и резервный электрический источник питания 17 постоянного тока.
В процессе работы подъемной машин при спуске груза контакт 11 датчика направления движения подъемного сосуда разомкнут, катушка электромагни та 10 обесточена, вследствие чего в электрогидравлической камере 8 управления давление отсутствует. В случае аварийного торможения в реясим спуска груза происходит срабатывание крана 2 предохранительного торможения. Тормозной цилиндр 1 соединяется с выходным каналом 6 крана 2 предохранительного торможения и в линии 9 обратной связи создается давление, под действием которого из-за отсутствия давления в электрогидравлической камере 8 управления золотник двулинейного клапана 7, перемещаясь из нейтрального положения, соединяет выходной канал 6 крана 2 предохранительного торможения со сливным каналом .
В результате рабочая жидкость из тормозного цилиндра 1 поступает на слив до полного ее истечения одновременно по двум направлениям: интенсивно через двухлине-рный клапан 7 и замедленно через дроссель 3,вследствие чего происходит быстрое наложение на барабан подъемной машины полного тормозного момента с требуемым коэффициентом статической надежности.
Таким:образом, предлагаемое изобретение позволяет получить целый ряд тормозных характеристик в отличие от прототипа более простыми средствами.
Экономический эффект достигается при эксплуатации путем упрощения конструкции, надежной работы устройства, дополнительного повышения без опасности, так как требуемая про- . грамма торможения в отлк-ш от прототипа выполняется н зависимо от того, начато ли движение подъемного сосуда в ту или иную сторону с крайних или промежуточных положений,
Формула изобретения
Устройство для управления предо : .хранительным тормозом подъемной , содержащее тормозйой цилиндр и сообщенный с ним кран предохранительного торможения, дроссель, подключенный параллельно к выходному, каналу крана предохранительного . торможения, регулирующий механизм с электромагнитом, обмотки которого подключены к источнику питания, и программный механизмС контактами, кинематически соединенный с.валом подъемной машины, о т л и чающееся тем, что, с целью упрощения конструкции, регулирующий механизм содержит двухлинейный клапан с электрогидравлической камерой управления и линию обратной связи по давлению в выходном канале крана предохранительного торможения, при этом обмотка электромагнита подключена к источнику питания посредством контактов программного механизма, представляющего собой набор резисторов/, шунтируемых подвижным контактом, кинематически связанным с валом подъемной машины.
Источники информации, принятые во внимание при экспертизе.
1. Авторское свидетельство СССР , 676543, кл. В 66 D 5/28, 1978 Л прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство предохранительногоТОРМОжЕНия пОд'ЕМНОй МАшиНы | 1979 |
|
SU810604A1 |
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU1009994A1 |
| Гидравлическое устройство дляупРАВлЕНия ТОРМОзОМ пОд'ЕМНыХМАшиН | 1979 |
|
SU812704A1 |
| Устройство для управления рабочим и предохранительным торможением подъемных машин | 1973 |
|
SU734081A1 |
| Устройство управления предохранительным тормозом машины наклонного подъема | 1979 |
|
SU772971A1 |
| ВЗРЫВОБЕЗОПАСНОЕ ЭЛЕКТРОГИДРАВЛИЧЕСКОЕ | 1965 |
|
SU176664A1 |
| Система управления тормозом шахтной подъемной машины | 1985 |
|
SU1306898A2 |
| Устройство управления предохранительнымТОРМОзОМ пОд'ЕМНОй МАшиНы | 1979 |
|
SU844534A1 |
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU1008150A1 |
| Устройство для управления тормозомпОд'ЕМНОй МАшиНы | 1979 |
|
SU802173A1 |