(54) МЕХАНИЗМ СМЫКАНИЯ ПРЕСС-ФОРМЫ ЛИТЬЕВОЙ
МАШИНЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для размыкания формы литьевой машины | 1981 |
|
SU1073116A1 |
| Устройство запирания форм литьевойМАшиНы для пОлиМЕРОВ | 1979 |
|
SU793795A1 |
| Механизм смыкания формы литьевой машины | 1982 |
|
SU1058789A1 |
| Механизм запирания форм многопозиционной литьевой машины | 1988 |
|
SU1608071A1 |
| Литьевая машина с двухступенчатым механизмом закрытия форм | 1969 |
|
SU299132A1 |
| Механизм смыкания форм литьевой машины | 1982 |
|
SU1041311A1 |
| Литьевая многопозиционная машина для переработки термопластичных материалов | 1989 |
|
SU1680539A1 |
| Предохранительное устройство литьевой машины | 1983 |
|
SU1133113A1 |
| Механизм запирания форм литьевой машины для полимеров | 1978 |
|
SU770822A1 |
| Механизм запирания форм литьевой машины для полимеров | 1987 |
|
SU1578004A1 |


1
Изобретение относится к машиностроению и может быть использовано в инжекционных литьевых машинах для литья под давлением пластических масс.,
Известен механизм смыкания пресс-формы литьевой машины, содержащий восьмизвенный рычажный механизм, привод, редуктор и систему зубчатых колес 1.
Недостатком известного механизма смыкания пресс-форм является большое количество деталей, испытывающих в процессе работы значительные нагрузки, сложность ремонта, отсутствие возможности регулирования усилия смыкания, развиваемого конечным звеном.
Наиболее близким к изобретению является механизм смыкания пресс-формы литьевой машины, содержащий переднюю и заднюю неподвижные плиты, связанные колоннами, на которых установлена подвижная плита, соединенная с гидроцилиндрами перемещения, смонтированными в задней неподвижной плите, и силовым штоком гидроцилиндра дожима, и заслонку для фиксации силового штока 2.
Однако в этом механизме наличие индивидуального привода заслонок усложняет
конструкцию механизма смыкания; наличие необходимых аппаратов управления приводо.м заслонок усложняет электрическую и гидравлическую системы управления механизмом смыкания; время, необходимое для срабатывания электрических и гидравлических аппаратов управления приводом заслонок, увеличивает время цикла смыкания, что снижает производительность.
Цель изобретения - упрощение конструкции и увеличение производительности механизма при сокращении времени смыкания пресс-формы.
Поставленная цель достигается тем, что в механизме смыкания пресс-формы литье15 вой машины, содержащем переднюю и заднюю неподвижные плиты, связанные колоннами, на которых установлена подвижная плита, соединенная с гидроцилиндрами перемещения, смонтированными в задней неподвижной плите, и силовым штоком гидроци ° линдра дожима, и заслонку для фиксации силового штока, каждый гидроцилиндр перемещения установлен с возможностью перемещения в задней неподвижной плите, подпружинен относительно нее и связан с заслонкои посредством кинематической передачи.
При этом кинематическая передача выполнена в виде зубчато-реечного механизма, состоящего из двух соединенных валом шестерен и зубчатой рейки, взаимодействующей с одной из щестерен для перемещения заслонки, а на корпусе гидроцилиндра перемещения выполнены зубья для взаимодействия со второй щестерней.
Кроме того, кинематическая передача выполнена в виде рычажного механизма, состоящего из двух установленных на плите и шарнирно соединенных концами рычагов, один из которых свободным концом щарнирно связан с корпусом гидроцилиндра перемещения с возможностью поворота в вертикальной плоскости, перпендикулярной плоскости плиты, а другой рычаг свободным концом щарнирно соединен с заслонкой с возможностью поворота в плоскости, парал-, лельной плоскости плиты.
Таким образом, использование кинематической передачи для сообщения движения заслонке от подвижного гидроцилиндра перемещения позволяет упростить конструкцию механизма смыкания за счет исключения дополнительного гидроцилиндра и необходимой аппаратуры управления.
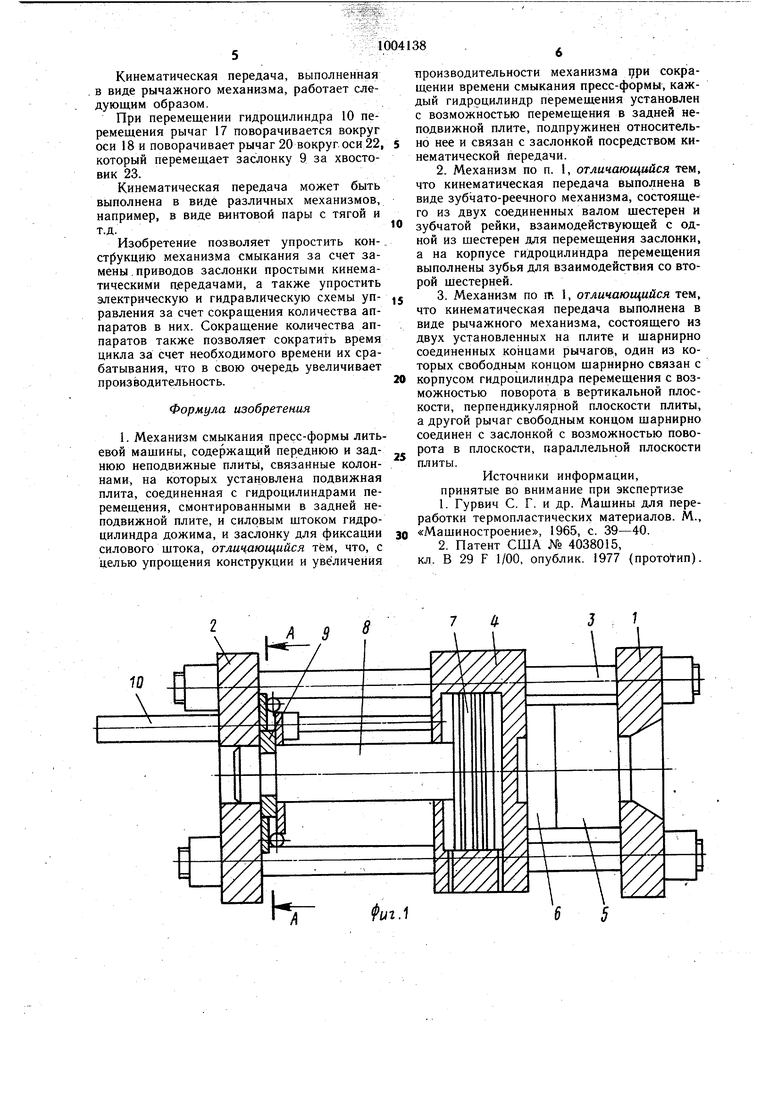
На фиг. 1 изображен механизм смыкания, осевой разрез; на фиг. 2 - разрез А-А на фиг. 1 (с кинематической передачей в виде зубчато-реечного механизма); на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 2; на фиг. 5 - неподвижная плита с кинематической передачей в виде рычажного механизма; на фиг. 6 - разрез Г-Г на фиг. 5.
Механизм смыкания пресс-формы литьевой мащины состоит из передней 1 и задней 2 неподвижных плит, соединенных колоннами 3, на которых установлена подвижная плита 4 с возможностью перемещения. На передней неподвижной плите 1 установлена полуформа 5, а на подвижной плите 4 - полуформа 6, образующая при смыкании с полуформой 5 пресс-форму. Подвижная плита 4 содержит гидроцилиндр дожима, поршень 7 которого жестко связан с силовым штоком 8. На задней неподвижной плите 2 установлена заслонка 9 для фиксации силового штока 8, выполненная в виде двух полуколец. Гидроцилиндры 10 перемещения подвижной плиты 4 установлены в задней неподвижной плите 2 с возможностью осевого перемещения. Направляющие колонки 11 с упорами 12 связаны с гидроцилиндрами 10 перемещения и проходят через заднюю неподвижную плиту 2. Пружины 13, охватывающие направляющие колонки 11 и расположенные между плоскостью задней неподвижной плиты 2 и фланцем гидроцилиндров 10 перемещения, фиксируют последние в переднем положении по упорам 12. Гидроцилиндры 10 перемещения связаны с заслонкой 9 посредством кинематической передачи. Кинематическая передача может быть выполнена в виде зубчато-реечного механизма (фиг. 2-4), состоящего из щестерни 14, входящей в зацепление с зубьями на корпусе гидроцилиндра 10 перемещения и связанной с шестерней 15 через вал 16, причем шестерня 15 входит в зацепление с зубчатой рейкой, выполненной заодно с заслонкой 9. Кинематическая передача в виде рычажного механизма состоит из рычага 17 (фиг. 5 и 6), который шарнирно связан с гидроцилиндром 10 перемещения и установлен на оси 18, которая закреплена на стойке 19 задней неподвижной плиты 2. Вторым свободным концом рычаг 17 соединен с рычагом 20 с помощью шарнира 21. Рычаг20 установлен на оси 22, установленной на задней неподвижной плите 2, и вторым свободным концом шарнирно связан с хвостовиком 23 заслонки 9.
Механизм смыкания пресс-формы литьевой машины работает следующим образом.
При повышении давления в поршневой полости гидроцилиндров 10 перемещения происходит перемещение подвижной плиты 4 их щтоками до смыкания полуформ 5 и 6. После смыкания полуформ 5 и 6 давление в поршневой полости повышается, и корпуса гидроцилиндров 10 перемещения, сжимая пружины 13, отходят назад. Это движение через кинематическую передачу передается заслонке 9, которая фиксирует силовой шток 8. Подачей давления на поршень 7 гидроцилиндра дожима происходит дожим литьевой формы путем перемещения подвижной плиты 4 относительно поршня 7 гидроцилиндра дожима. Пружины 13 рассчитаны на усилие, достаточное для удержания гидроцилиндров 10 перемещения в переднем положении при смыкании полуформ 5 и 6, т.е. при движении подвижной плиты 4 вперед.
При размыкании полуформ 5 и 6 понижается давление в поршневой полости гидроцилиндра дожима и повыщается в штоковой полости. Происходит отрыв: подвижная плита 4 отходит к порщню 7. Понижается давление в порщневой полости гидроцилиндров 10 перемещения и до осуществления реверса, корпуса гидроцилиндров 10 перемещения под действием пружин 13 подаются вперед до упора 12, и заслонка 9 через кинематическую передачу от перемещения гидроцилиндров 10 перемещения освобождает силовой щток 8. Подается давление в штоковую полость гидроцилиндров 10 перемещения, и подвижная плита 4 отводится назад.
Кинематическая передача, выполненная в виде зубчато-реечного механизма передает перемещение заслонке 9 от гидроцилиндра 10 перемещения следующим образом. Шестерня 14 вращается и через вал 16 передает вращение щестерне 15, которая, взаимодействуя с зубчатой рейкой, перемещает заслонку 9. Кинематическая передача, выполненная в виде рычажного механизма, работает следующим образом. При перемещении гидроцилиндра 10 перемещения рычаг 17 поворачивается вокруг оси 18 и поворачивает рычаг 20 вокруг оси 22 который перемещает заслонку 9 за хвостовик 23. Кинематическая передача может быть выполнена в виде различных механизмов, например, в виде винтовой пары с тягой и т.д. Изобретение позволяет упростить конст 5укцию механизма смыкания за счет замены .приводов заслонки простыми кинематическими аередачамй, а также упростить электрическую и гидравлическую схемы управления за счет сокращения количества аппаратов в них. Сокращение количества аппаратов также позволяет сократить время цикла за счет необходимого времени их срабатывания, что в свою очередь увеличивает производительность. Формула изобретения 1. Механизм смьжания пресс-формы литьевой мащины, содержащий переднюю и заднюю неподвижные плить, связанные колоннами, на которых установлена подвижная плита, соединенная с гидроцилиндрами перемещения, смонтированными в задней неподвижной плите, и силовым штоком гидроцилиндра дожима, и заслонку для фиксации силового щтока, отличающийся тем, что, с целью упрощения конструкции и увеличения производительности механизма jgipH сокращении времени смыкания пресс-формы, каждый гидррцилиндр перемещения установлен с возможностью перемещения в задней неподвижной плите, подпружинен относительно нее и связан с заслонкой посредством кинематической передачи. 2.Механизм по п. 1, отличающийся тем, что кинематическая передача выполнена в виде зубчато-реечного механизма, состоящего из двух соединенных валом шестерен и зубчатой рейки, взаимодействующей с одной из шестерен для перемещения заслонки, а на корпусе гидроцилиндра перемещения выполнены зубья для взаимодействия со второй шестерней. 3.Механизм по m 1, отличающийся тем, что кинематическая передача выполнена в виде рычажного механизма, состоящего из двух установленных на плите и шарнирно соединенных концами рычагов, один из которых свободным концом шарнирно связан с корпусом гидроцилиндра перемещения с возможностью поворота в вертикальной плоскости, перпендикулярной плоскости плиты, а другой рычаг свободным концом шарнирно соединен с заслонкой с возможностью поворота в плоскости, параллельной плоскости плиты. Источники информации, принятые во внимание при экспертизе 1.Гурвич С. Г. и др. Машины для переработки термопластических материалов. М., «Мащиностроение, 1965, с. 39-40. 2.Патент США № 4038015, кл. В 29 F 1/00, опублик. 1977 (прототип). .г б В
© 0 © © @ © //////
@ Q о © Q о Q
/J П
W
