1
Изобретение относится к манипуляторам робототехнических устройств быть использовано в схватах манипуляционньпс роботов и является усовершенствованием технического решения по авт.св. № 889423. .
Целью изобретения является повышение надежности за счет обеспечения фиксации элементов схвата в момент удержания объекта манипулирования.
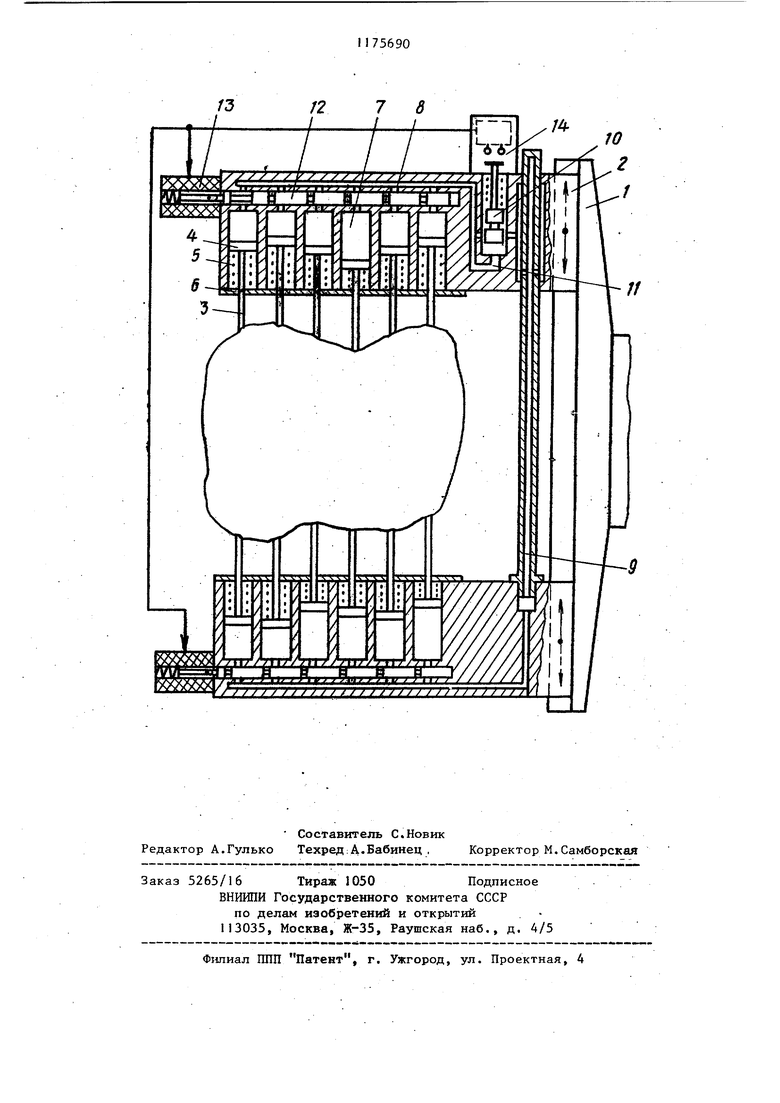
На чертеже схематически изобра жено предлагаемое устройство.
Схват манипулятора содержит корпус 1, в котором установлены две поступательно перемещающиеся в направлении изделия губки 2. В цилиндрических глухих отверстиях губок расположены ряды стержней 3 с поршнями 4, отжимаемые от центра схвата пружинами 5, установленными между поршнями 4 и закрепленной на губке пластиной 6. Рабочие полости 7 цилиндрических отверстий каждой из губок заполнены рабочей жидкостью и соединены каналами 8. Рабочие полости обеих губок связаны между собой соединяющей магистралью 9, в котооой установлен нормально открытьй клапан 10, имеющий канал 11 управления. Губки 2 снабжены устройством фиксации положения стержней, вьшолненным в виде плунжеров 12, обеспечивающих одновременную изоляцию рабочих полостей всех поршней друг от друга. Канал 11 соединен с рабочими полостями 7 epeз канал и кольцевые проточки плунжеров 12, причем в одном из плунжеров 12 губки 2 (содержащей клапан 10) одна из кольцевых проточек вьшолнена большего размера для того, чтобы при любом рабочем положении плунжер обеспечить постоянную связь канала 11 управления с рабочей полостью 7 одного из поршней, например крайнего левого в верхней губке 2.,.Каждый плунжер снабжен механизмом 13 управления движением плунжера, выполненным в виде электромагнита с возвратной пружиной, причем его вход подключен к устройству 14 индикации состояния нормально открытого клапана 10, выполненного в виде микровыключателя, механически связанного с клапаном 10.
56902
Схват работает следующим образом В исходном положении при разведенных губках 2 все стержни 3 под действием пружин. 5 сдвинуты на некоторое одинаковое расстояние от центра схвата,клапан 10 открыт, сигнал на выходе устройства индикации 14 отсутствует, рабочие полости 7 всех поршней губки через кольцевые
О проточки плунжеров 12 сообщаются через каналы 8 между собой и с соединяющей магистралью 9.
При сближении губок 2 один ипи несколько стержней 3 входят в соприкосновение с объектом манипулирования и перемещаются от центра схвата, вытесняя поршнями 4 рабочую жидкость и перераспределяя ее .через . каналы 8 и соединяющую магистраль 9
0. между рабочими полостями 7 поршней, при этом все остальные стержни смещаются к центру схвата. Процесс захвата заканчивается в момент контакта всех стержней 3 с объектом манипулирования. При дальнейшем сближении губок 2 и увеличении усипия захвата возросшее, в рабочих полостях 7 поршней давление подается по каналу 11 управления к торцу клапана
0 10, который перекрывает соединяющую магистраль 9, что вызывает срабатывание устройства индикации состояния клапана 10, с выхода которого поступает сигнал на вход электромагнита
- механизма 13 управления движением плунжеров. Плунжеры перемещаются, обеспечивая изоляцию рабочих полостей 7 всех поршней друг от друга, в результате чего все стержни жестко
Q фиксируются (так как жидкость практически несжимаема) и объект манипулирования оказывается надежно зажатым стержнями.
При разведении губок 2 давление
5 в рабочих полостях 7 поршней падает в результате наличия постоянной связи канала 11 с рабочей полостью 7 одного из поршней, например крайнего левого в верхней губке, понижается
Q давление в канале 11 управления, клапан 10 открывается, сигнал на выходе устройства индикации 14 исчезает, плунжеры 12 возвращаются в исходное положение и стержни 3
J5 под действием пружин 5 занимают исходное положение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1980 |
|
SU889423A1 |
| Схват манипулятора | 1988 |
|
SU1585147A1 |
| Устройство управления схватом манипулятора | 1988 |
|
SU1824299A1 |
| Схват манипулятора | 1983 |
|
SU1202864A1 |
| Вальцешлифовальный станок для обработки валков в собственных подшипниках | 1975 |
|
SU556029A1 |
| Измерительная захватная головка манипулятора | 1987 |
|
SU1393634A1 |
| Измерительный схват | 1986 |
|
SU1395481A1 |
| Адаптивный схват промышленного робота | 1979 |
|
SU872255A1 |
| Гидрозахват к испытательным машинам (его варианты) | 1981 |
|
SU953501A1 |
| Электрогидравлический привод для дистанционного управления | 1974 |
|
SU603779A1 |
СХВАТ МАНРШУЛЯТОРА по авт..св. № 889423, отличающийся тем, что, с целью повышения надежности, он снабжен устройством, индикации состояния нормально открытого клапана, вьтолненным в виде микропереключателя, соединенного с клапаном, а губки снабжены устройствами фиксации- положения стержней, каждое из которых выполнено в виде плунжера с кольцевыми проточками, смонтированного в дополнительно выполненной полости губки, и механизма управления перемещением плунжера, при этом дополнительные полости обеих губок связаны между собой через соединяющую магистраль и с рабочими полостями, а устройство индикации состояния клапана связано с устройствами фиксации положения стержней обеих губок, при этом механизм управления перемещением плунжера устройства фиксации положения стержней губки W вьтолнен в виде электромагнита с возвратной пружиной.
| Схват манипулятора | 1976 |
|
SU626947A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Схват манипулятора | 1980 |
|
SU889423A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
