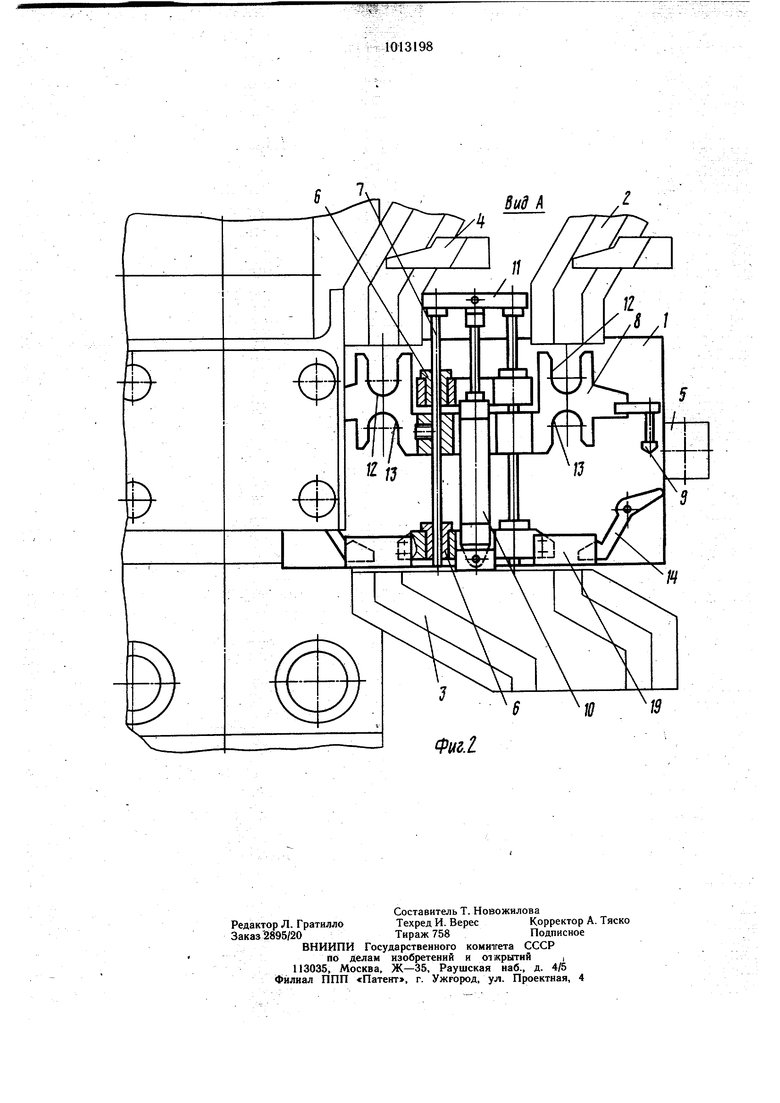
Изобретение относится к машиностроению и может быть использовано для подачи деталей к обрабатывающим станкам. Известно загрузочно-разгрузочное устройство, содержащее основание, подводящие и отводящие лотки, механизм захвата, перегружатель с патронами для загрузки и выгрузки деталей. Отводящие лотки в зоне выгрузки деталей имеют две собачки, выполняющие роль механизма захвата детали с целью снятия ее с патрона выгрузки перегружателя. Известное устройство предназначено для подачи к станку детали цилиндрической формы 1 . Целью изобретения является расщирение технологических возможностей устройства за счет обеспечения подачи к станку детали типа тел вращения, имею1дей фланец с фасонным контуром и сферическую боковую поверхность. Такой деталью является, например, корпус щарового пальца подвески автомобиля. Поставленная цель достигается тем, что в загрузочно-разгрузочном ус-тройстве, содержащем основание, подводящие и отводящие лотки, механизм захвата и перегружатель с патронами для загрузки и выгрузки деталей, механизм захвата выполнен в виде установленного на основании с возможностью возвратно-поступательного перемещения в вертикальной плоскости держателя с верхними и нижними центрирующими пазами, смонтированных на держателе толкателей и шарнирно закрепленных на основании двуплечих рычагов, установленных с возможностью взаимодействия одним плечом с толкателями, адругим - с держателями в нижних центрирующих пазах держателя. Н,а фиг. 1 показана компоновочная схема устройства; на фиг. 2 - вид А на фиг. 1. Загрузочно-разгрузочное устройство содержит основание 1 в виде вертикально расположенной плиты, подводящие лотки 2 и отводящие лотки 3 с отсекателями ,4. Основание приводится, в движение приводом 5. На основании неподвижно закреплены направляющие втулки 6, в которых перемещаются две скалки 7 с закрепленны.м на них неподвижно держателем 8 с толкателями 9. Держатель приводится в движение в вертикальной плоскости с помощью пневмоцилиндра 10, щток которого связан со скалками через поперечину 11. В держателе выполнены верхние 12 и нижние 13 центрирующие пазы. На основании ниже держателя установлены двуплечие рычаги 14. Верхняя пара плеч рычагов взаимодействует с толкателями, а нижняя пара плеч взаимодействует с деталями в нижних центрирующих пазах держателя 8. Устройство работает следующим образом, В исходном положении основание 1 находится в зоне загрузки-выгрузки, а держатель 8 находится в верхнем положении. Отсекатели 4 подводящих лотков 2 пропускают по одной детали, которые скатываются под собственным весом в верхние центрирующие пазы 12 держателя. Центрирование детали происходит по боковой сферической поверхности. При этом фланец детали оказывается между основанием 1 и держателем 8. Тем самым детали удерживаются от выпадания. Далее основание 1 перемещается в зону перегрузки. Здесь вступает в работу перегружатель 15, имеющий два верхних патрона 16 для загрузки и два нижних патрона 17 для выгрузки. В исходном положении перегружатель 15 находится в верхнем крайнем положении и отведен назад. Его верхние патроны 16 загрузки пусты, а в нижних патронах 17 выгрузки зажаты детали, снятые рэнее с патронов 18 шпинделей станка. Как только основание 1 остановится, перегружатель 15 переместится так, чтобы кулачки патронов 16 загрузки входили в отверстия деталей, находящихся в верхних пазах держателя. При этом фланцы деталей зажатых в патронах 17 выгрузки, упираются в основание 1. Верхние патроны 16 загрузки зажимают детали. Начинается работа механизма захвата. Держатель 8 опускается вместе со скалками 7. Нижние центрирующие пазы держателя 8 охатывают боковые сферические поверхностии деталей, зажатых патронами 17 выгрузки, а верхние пазы выходят из контакта с деталями, зажатыми в патронах 16 загрузки. Кро ме того, толкатели 9, нажимая на верхние плечи рычагов 14, поворачивают их. При этом нижние плечи рычагов подпирают снизу детали, зажатые в патронах 17 выгрузки. Таким образом, детали оказываются заневоленными со всех сторон. Затем патроны 17 выгрузим разжимаются, перегружатель 15 перемещается в исходное положение. В его верхних патронах загрузки зажаты детали, а патроны 17 свободны, так как детали остались в держателе 8. Основание 1 перемещается в зону загрузки-выгрузки. Держатель 8 поднимается, а толкатели 9 освобождают верхние плечи рычагов 14. Нижние плечи рычагов опускаются. Так как нижние плечи рычагов поддерживают детали, находящиеся в нижних пазах держателя 8, то вместе с рычагами 14 детали опускаются. По наклонной поверхности нижних плеч рычагов 14 детали скатываются в отводные лотки 3. От выпадания деталей в момент их выкатывания из нижних пазов держателя 8 удерживают экраны 19. Предлагаемое устройство позволит полностью автоматизировать процесс загрузкивыгрузки деталей типа корпусов щаровых пальцев подвески в обрабатывающие станки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочно-разгрузочное устройство | 1977 |
|
SU667379A1 |
| Загрузочно-разгрузочное устройство | 1985 |
|
SU1247230A1 |
| Способ загрузки токарных полуавтоматов деталями для их двусторонней обработки и автоматическая линия для его осуществления | 1988 |
|
SU1662807A1 |
| Загрузочно-разгрузочное устройство | 1987 |
|
SU1563893A1 |
| Загрузочное устройство | 1982 |
|
SU1089874A1 |
| Загрузочное устройство для деталей типа дисков и колец | 1974 |
|
SU607703A1 |
| Загрузочно-разгрузочное устройство | 1978 |
|
SU795687A1 |
| Автооператор для многошпиндельных станков | 1986 |
|
SU1465248A1 |
| Многопозиционный станок для отгибки фланцев и зиговки полых деталей из листового материала | 1982 |
|
SU1044382A1 |
| МЕХАНИЗМ ЗАГРУЗКИ И ВЫГРУЗКИ | 1972 |
|
SU344961A1 |
ЗАГРУЗОЧНО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО, содержащее основание, подводящие и отводящие лотки, механизм захвата и перегружатель с патронами для загрузки и выгрузки деталей, отличающееся тем, что, с целью расширения технологических возможностей устройства, механизм захвата выполнен в виде установленного на основании с возможностью возвратно-поступательного перемещения в вертикальной плоскости держателя с верхними и нижними центрирующими пазами, смонтированных на держателе толкателей и щарнирно закреплённых на основании двуплечих рычагов, установленных с возможностью взаимодействия одним плечом с толкателями, а другим - с деталями в нижних центрирующих пазах держателя. rs (Л оо со 00 фиг.1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Загрузочное устройство к токарным полуавтоматам фирмы Weisser | |||
| Чертеж № 16050647, АвтоВАЗ, 1968. | |||
