Изобретение относится к средствал автоматизации технологических процессов и может найти применение в металлообрабатывающей промышленности на шлифовальных станках.
Известны механизмы загрузки и выгрузки деталей, подаваемых по логку в рабочую иозицию посредством транспортирующего рычага, которому приводом сообщается осевое возвратно-постуиательное движение, время на которое при загрузке и выгрузке деталей из транспортирующего рычага входит в цикл работы механизма, снижая его производительность.
Предложенный механизм отличается от известных тем, что в нем перегружатель выполиен в виде шарнирно закрепленного на конце подающего лотка рычага, снабженного на одном плече двусторонним захватом детали, а на другом - отсекающим выстуиом. Указанные отличия позволяют одновременно загружать и выгружать транспортирующий рычаг, что повышает производительность механизма.
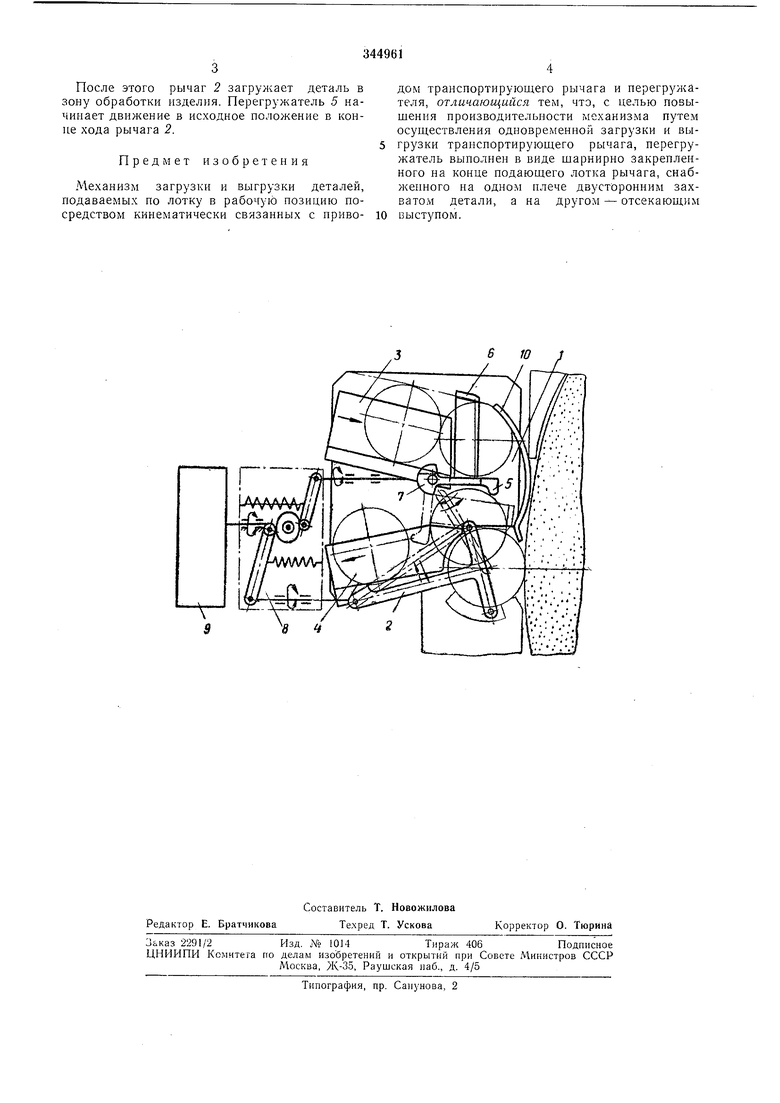
На чертеже схематично изображен описываемый механизм.
На корцусе У шарнирно укреплены транспортирующий рычаг 2 с двусторонним захватом детали, подводящий 3 и отводящий 4 лотки. На конце подводящего лотка 3 щарнирно закреплен перегружатель 5, представляющий собой рычаг с двусторонним захватом 6 для
принудительной транспортировки деталей на одном плече и с отсекающим выступом 7 на другом плече. Перегружатель 5 и транспоргирующий рычаг 2 через кинематическую связь, например через кулачковый распределительный вал 5, получаЕот движение от привода 9. Нижняя наиравляющая лотка 3 выполнена выступающей за ось поворота перегружателя 5 на размер, геометрически обеспечивающий транспортировку деталей ио требуемой траектории и предотвращающий отставание детали от захвата перегружателя 5 в начальный момент движения. Кроме того, на корпусе / укреплена направляющая планка W. Тонкими линиями показана зона обработки детали. Механизм работает следующим образом, В конце хода транспортирующего рычага перегружатель 5, получив движение от привода 9, двусторонним захватом 6 принудительно перемещает предварительно загруженную в него в исходном положении деталь навстречу рычагу, одновременно выталкивая из его захвата выгружаемую деталь и ограничивая отсекающим выпycкo ход деталей в лотке 3. Прп движении перегружателя 5 деталь поддерживается направляющей планкой 10. В конечное положение транспортирующий рычаг 2 и перегружатель 5 приходят одновременно, при этом загрул аемая деталь попадает в захват транспортирующего рычага 2.
После этого рычаг 2 загружает деталь в зону обработки изделия. Перегружатель 5 начинает движение в исходное положение в конце хода рычага 2.
Предмет изобретения
Механизм загрузки и выгрузки деталей, подаваемых по лотку в рабочую позицию посредством кинематически связанных с приводом транспортирующего рычага и перегружателя, отличающийся тем, что, с целью повышения производительности механизма путем осуществления одновременной загрузки и выгрузки транспортирующего рычага, перегружатель выполнен в виде щарнирно закрепленного на конце подающего лотка рычага, снабженного на одном плече двусторонним захватом детали, а на другом - отсекающим
выступом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочно-разгрузочное устройство | 1982 |
|
SU1013198A1 |
| Автоматизированная поточная линия для термической обработки | 1983 |
|
SU1108114A1 |
| Автоматическая линия для обработки деталей типа валов | 1983 |
|
SU1175672A1 |
| Автоматическая линия для механической обработки деталей типа валов | 1990 |
|
SU1791099A1 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
| Установка для транспортирования паковок, например ленты, намотанной на катушки, от чесальных к ленточным машинам, а от последних к ровничным и прядильным машинам | 1960 |
|
SU135003A1 |
| Загрузочное устройство | 1982 |
|
SU1024223A2 |
| Устройство для перегрузки изделий | 1977 |
|
SU686953A1 |
| Устройство для загрузки деталей | 1973 |
|
SU462637A1 |
| АВТОМАТ ДЛЯ ОБРАБОТКИ ПЛОСКИХ МАЛОГАБАРИТНЫХДЕТАЛЕЙ | 1968 |
|
SU222133A1 |
