Изобретение относится к измерительной технике и может быть испол зовано/ в.частности в прокатном производстве для измерения дли-ны холоднокатанной. полосы. Известно устройсво для измерени длины материала, содержащее датчики наличия материала, преобразовав тели угла поворота рабочих валков и вычислительный блок IJ. Недостатком известного устройст ва является невысокая точность измерения.. Наиболее близким по технической сущности и достигаемому эффект к изобретению является устройсво для измерения длины.материала при намотке на барабан, содержа1 |ее про тягивающие валки, кинематически связанный с ними-перобразователь угла поворота протягивающих валков датчик наличия материала в протягивающих валдах, блок вычисления и связанный с ним блок регистрации 2 . . . Недостатком известного устройст является невысокая точность измерения, обусловленная проскальзы;ванием материала относительно бара бана моталки, недостаточной точностью толщиномеров, непостоянст-, вом натяжения материала. Цель, изобретения - повышение, точности измерения. Поставленная цель достигается тем, что устройство снабжено мерным роликом и кинематически . связанным с ним преобразователем угла поворота мерного ролика,, последовательно соединенными блоком умножения, частотным компаратором и селектором, выход преобразователя угла поворота мерного ролика соединен с- вторым входом частотного компаратора и вторым входом селектора, третий вход селектора соединен с-выходом блока умножения а выход - с первым входом блока вычисления, второй вход KoTopioro соединен с датчиком наличия, материала в протягивающих валках, а .вход блока умножения соединен с преобразователем угла поворота протягивагацих валков .На чертеже показана блок-схема устройства. Устройство содержит датчик 1 н личия материала в протягиваквдих валках 2, преобразователь 3 угла поворота протягивакядих валков,вычислительный блок 4, селектор 5, частотный компаратор. 6,блок 7 умн жения, мерный ролик 8, преобразователь 9 угла поворота мерного .ролика 8 и блок 10 регистрации. Датчик 1 наличия ма териала S протягивающих валках соединен с первым входом вычислительного бло 4, к второму входу которого подключен селектор 5. На третий вход вычислительного блока 4 подается код це«ы импульса. Первый вход селектора 5 через последовательно соединенные частотный компаратор 6 и блок 7 умножения подключен к выходу преобразователя 3 угла поворота протягл.вающи-х. валков, второй вход селектора 5 соединен с вторым входом компаратора б и подключен к выходу Преобразователя 9 угла поворота мерного ролика 8, третий вход селектора 5 подключен к выходу блока 7 умножения, на второй входкоторого подается код коэффи.циента умножения,, выход блока 4 вычисления соединен с вхо.дом б.пока 10 регистрации. . Цена импульса длины преобразователя 9 задается через третий вход в блок вычислений и определяется из выражения , в - цена импульсов преобразователя 9 в единицах длины,3,1.4;. диаметр г ерного ролика 8;число импульсов преобразователя 9 за один оборот ролика 8i Код коэфф циента умножения блока 7 Выбирают с учетом соотношения : V . , VMM- Ы Т) J о где Dg и DJ - диаметры соответственного мерного ролика 8 и протягиваю: щих валков 2; -число импульсов пре.образователя 9. за один оборот мерного ролика 8; -число импульсов преобразователя 3 за один оборот валко 2, устройство работает след5 ющим образом. В исходном состоянии, когда в валках 2. отсутствует полоса материала, преобразователь 3 вырабатывает частоту импульсов, которая после умножения в блоке 7 на коэффициент умножения поступает на один из входов компаратора 6 частоты, на другой вход которого частота не поступает (ролик 8 не вращается и преоб1разователь 9 не вырабатывает импульсы). На выходе компаратора 6 будее сигнал 1 , при котором селектор 5 пропускает на вход блока 4 импульсил с выхода блока 7 умножени я.
Однако блок 4 вычислений не проиводит, поскольку отсутствует разрешающий сигиал с датчика 1 наличия полосы в протягивающих валках 2.
При поступлении полосы в валки 2 датчик 1 формирует разрешающий сигнал, по которому блок 4 начинает, принимать импульсы с выхода селектора 5 и вычислять длину полосы с учетом заданной на третий вход блока 4 значения цены .этих импульсов. Та- . КИМ образом, вычисляется текугдая . координата переднего конца полосы.
При прикосновении к мерному ролику 8 полоса начинает его вращать, обеспечивает.выработку импульсов преобразователем 9, которые посуупают: ;На второй вход компаратора б частоты. Поскольку в этом случав .натяжение полосы недостаточно, очевидно линейная скорость мерного ро.лика 8 из-за проскальзывания полосы будет меньше линейной скорости протягиваквдих валков 2,-Компаратор 6 частоты по прежнему будет выдавать на выход сигнал
После заправки переднего конца полосы .в барабан моталки и закрепления его путем намотки-нескольких витков полосы на барабан создают рабочее натяжение полосы на участке между моталкой и протягивающими валками 2 выходной клетки стана. При этом обеспечивается такой контакт полосы с мерным роликом 8, при котором проскальзывание их относительно друг друга практически отсутствует.
Начиная с этого момента линейные скорости протягивающих валков 2 и мерного ролика 8 становятся одинаковыми .и равными линейной скорости полосы, т.е. единичные линейные перемещения их также становятся равными. . .
При равенстве линейных скоростей частоты сигналов на входе компаратора- б также равны, на его выходы появляется нулевой сигнал, обеспечивая переключение каналов в селекторе 5 и пропуская с этого момента на вход блока .4 импульсы преобразователя 9.
В блоке 4 будет вычисляться длина полосы -с учетом импульсов от преобразователя 9 мерного роли ка 8.
При уменьшении натяжения поло0сы до значения, при котором по- . является проскальзывание полосы относительно мерного ролика .8, частота на выходе преобразователя 9 станет меньше частоты на выходе блока 7 умножения, и компаратор 6
5 - снова сформирует выходной сигнал , при котором селектор 5 будет пропускать на выход импульсы преобразователя 3, прошедшее через блок 7 умножения. Так работа
0 устройства будет продолжаться до момента выхода, полосы из зоны чувсагвительности датчика 1.
В момент выхода полосы из зоны чувствительности датчика 1. .(из про- .
5 катных валков выходной клетки стана) блок 4 прекратит принимать импульсы от селектора 5 и зафиксирует окончательный результат измерения длины, которой поступит в блок Ю ре0гистрации.
В описанном измерителе длины проката исключена погрешность измерения длины, возникающая за счет проскальзывания полосы относитель5ного барабана моталки и за счет уменьшения натяжения полосы в процессе ниже предела, при котором наступает несоответствие линейных скоростей мерного ролика, полосы и барабана.
0
Определение текущей координаты переднего конца полосы позволяет повысить точность автоматизации процесса заправки полосы в. барабай моталки и производить оперативный
5 учет продукции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения длины материала | 1986 |
|
SU1352186A1 |
| Измеритель длины полосы | 1979 |
|
SU875205A1 |
| Устройство автоматического торможения реверсивного стана холодной прокатки | 1990 |
|
SU1787478A1 |
| Способ автоматического останова моталки с рулоном в заданном положении на листовом стане | 1982 |
|
SU1052297A2 |
| Устройство измерения средней толщины проката | 1983 |
|
SU1068192A1 |
| Устройство автоматического торможения реверсивного стана холодной прокатки | 1980 |
|
SU937070A1 |
| Устройство для подъема съемной тележки моталки | 1981 |
|
SU988403A1 |
| Способ определения момента подачи управляющего сигнала на механизм,работающий согласованно с перемещением материала | 1983 |
|
SU1148728A1 |
| Устройство для точного останова барабана моталки | 1980 |
|
SU902891A1 |
| Устройство для регулирования натяжения полосы при намотке в рулон | 1981 |
|
SU956091A1 |
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЛИНЫ МАТЕРИАЛА ПРИ НАМОТКЕ НА БАРАБАН, содержащее протягивающие валки, кииематическй связанный с .ними преобразователь угла поворота протягивающих валков, датчик наличия материала в протягивающих валках, блок вычисления и связанный с ним блок регистрации, о т л и ч а ю .т е е с я тем, что, с . целью повышения точности измерения, оно снабжено мерным рол){ком и китематически связанным с ним.прео6разо вателем угла поворота мерного ролика, последовательно соединенными блоком . умножения, частотным компаратором и селектором, выход преобразователя угла поворота мерного ролика соединен с вторьвл входом частотного компаратора и вторым входом селектору, третий вход селектора соединен с выходом блока умножения-, а выход - с первым входом блока вычисления, второй вход которого § соединен с датчиком наличия материа О) ла в протягивакяцих валках, а вход блока умножения соединен с преобраэо с: вателем угла поворота протягиваю;1цих валков. DO 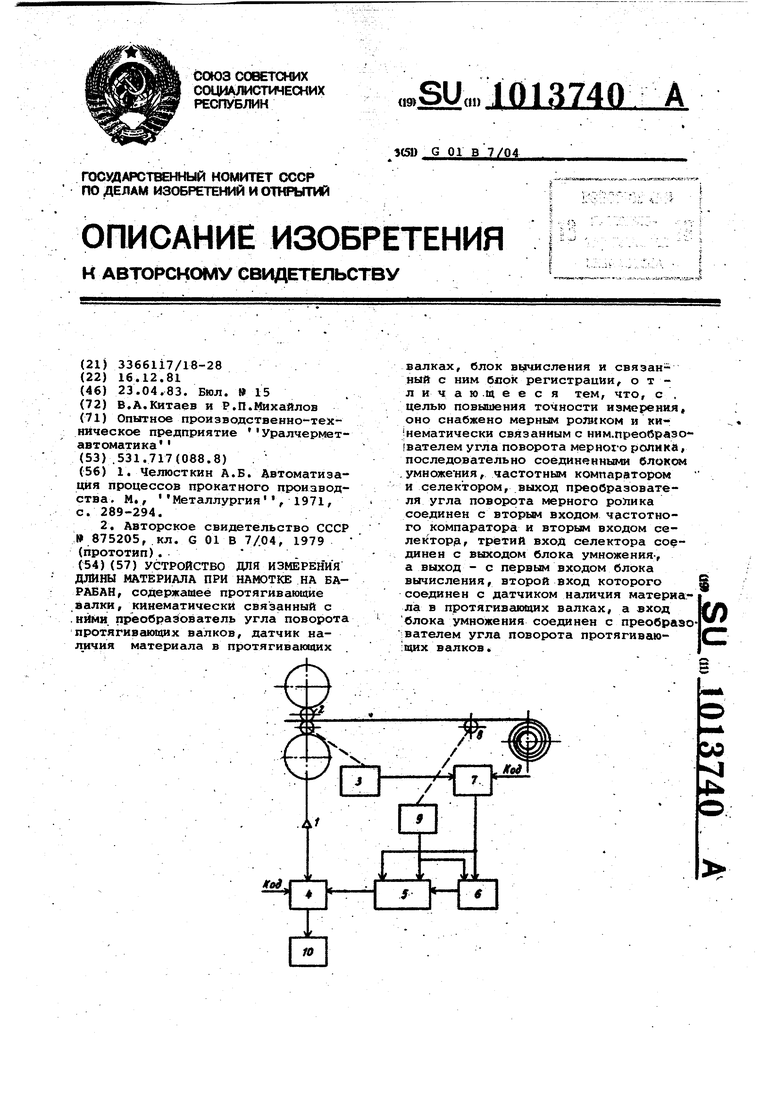
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Челюсткин А.Б | |||
| Автоматизация процессов прокатного производства | |||
| М., Металлургия , 1971, с | |||
| РЕЛЬСОВАЯ ПЕДАЛЬ | 1920 |
|
SU289A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Измеритель длины полосы | 1979 |
|
SU875205A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| . | |||
