Изобретение относится к автоматизации производственных процессов и может быть использовано для подачи заготовок в рабочую зону пресса при последовательной Ц1тамповке деталей из штучных заготовок. Известен многопозиционный автоматический штамп, в котором матрицедержатель (диск) вместе с матрицами получает периодический поворот на угол 30° при помощи байонетного и храпового механизмов, приводимых в движение ползуном пресса 1. Однако данный штамп имеет пониженную надежность работы, особенно на быстроходных прессах. Известно устройство для подачи штучных заготовок в зону обработки, содержащее нижнюю и верхнюю плиту с вертикальной стойкой, прерывисто вращающийся в горизонтальной плоскости захватный орган. установленный на вертикальной стойке подвижный цилиндрический кулачок с клиновыми копирами, взаимодействующий с захватным органом, втулку, связанную с захватным органом и имеющую на внутренней поверхности толкатели с клиновыми поверхностями 2. В указанном механизме доворот захватного органа на угол зарядки осуществляется посредством толкателя и его пружины при ходе -механизма вверх. Следовательно, при выходе пружины из строя указанный доворот выполнен не будет, что пр ходе механизма вниз выведет его и инструмент из строя. Кроме указанного, рабочий поворот захватного органа осуществляется при ходе механизма вниз, а в таких случаях весьма затруднительно создать блокировку мгновенного останова приводного оборудования, что также в случае поломки любого элемента приводит к выходу из строя весь механизм в целом. Таким образом, известная конструкция недостаточно надежна в работе. Цель изобретения - повышение надежности работы механизма. Поставленная цель достигается тем, что устройство, содержащее нижнюю и верхнюю плиту с вертикальной стойкой, прерывисто вращающийся в горизонтальной плоскости захватный орган, установленный на вертикальной стойке подвижный цилиндрический кулачок с клиновыми копирами, взаимодействующий с захватным органом, втулку, связанную с захватным органом и имеющую на внутренней поверхности толкатели с клиновыми поверхностями, снабжено горизонтальной осью с роликами, установленной в жестко соединенной с верхней плитой центральной стойке, коническими штырями, установленными в ниж-55 копиры подвижного цилиндрического куней плите и взаимодействующими с клино-лачка 4 входят в зацепление с углом си
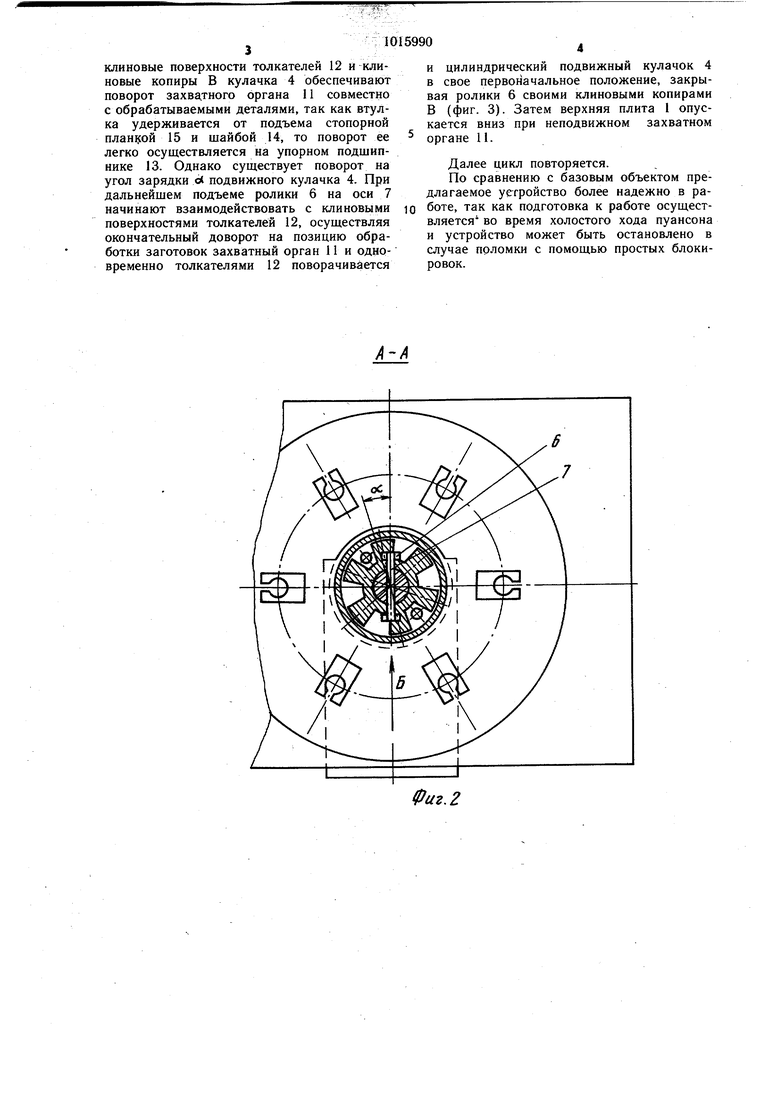
выми копирами подвижного цилиндричес-с клиновыми поверхностями толкателей 12
кого кулачка, а в противолежащих другзахватного органа 11. Усилием подъема другу клиновых копирах подвижного цилиндрического кулачка с внутренней стороны выполнены выборки и пазы на глубину, превышающую высоту клиновых копиров, в которых размещены упомянутые ролики, осевое сечение которых равно поперечному сечению выборки копира кулачка, при этом промежутки между клиновыми копирами выполнены сквозными. На фиг. 1 показана схема -предлагаемого механизма в его нижнем положении; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 2. Механизм для подачи заготовок в зону обработки состоит из верхней плиты 1 с жестко установленными на ней пуансонами 2 и вертикальной стойкой 3. На стойке 3 в ее нижней утонченной части расположен подвижный цилиндрический кулачок 4 со сквозными промежутками между копирами В, удерживаемый от съема стопорной шайбой 5. На стойке 3 и вну три противостоящих клиновых копиров В кулачка 4 в утоняющих выборках и пазах. выполненных на глубину, большую высоты клиновых копиров, размещены ролики 6 на оси 7, осевое сечение которых идентично поперечному сечению копира кулачка. Основанием механизма являются промежуточная плита 8 и нижняя плита 9. В промежуточной плите 8 находится втулка 10 захватного органа 11 и на внутренней образующей втулки 10 эквидистантно клиновым копирам кулачка 4 жестко закреплены толкатели 12 с клиновыми поверхностями захватного органа 11. На нижней части втулки 10 установлен упорный подшипник 13 и стопорная шайба 14. Втулка стопорится от подъема из промежуточной плиты 8 стопорной планкой 15. В нижней плите 9 неподвижно установлены конические штыри 16. В верхней плите 8 под захватным органом 11 расположены матрицы 17. Механизм работает следующим образом. При ходе верхней плиты 1 вниз совместно с ней опускаются стойка 3 с подвижным цилиндрическим кулачком 4. При этом клиновые копиры кулачка 4 своими нижними торцами взаимодействуют с коническими штырями 16, и это обеспечивает поворот кулачка на угол зарядки механизма с. Ролики 6 и ось 7 установлены в стойке 3 и ось 7 ограничивает поворот кулачка 4, а ролики частично выходят изпод клиновых копиров кулачка 4. Механизм подготовлен для поворота захватного органа 11 и произведена операция, например штамповка, При подъеме верхней плиты 1 приводным механизмом (не показан) клиновые
клиновые поверхности толкателей 12 и клиновые копиры В кулачка 4 обеспечивают поворот захватного органа 11 совместно с обрабатываемыми деталями, так как втулка удерживается от подъема стопорной план1 ой 15 и шайбой 14, то поворот ее легко осуществляется на упорном подшипнике 13. Однако существует поворот на угол зарядки с подвижного кулачка 4. При дальнейшем подъеме ролики 6 на оси 7 начинают взаимодействовать с клиновыми поверхностями толкателей 12, осуществляя окончательный доворот на позицию обработки заготовок захватный орган 11 и одновременно толкателями 12 поворачивается
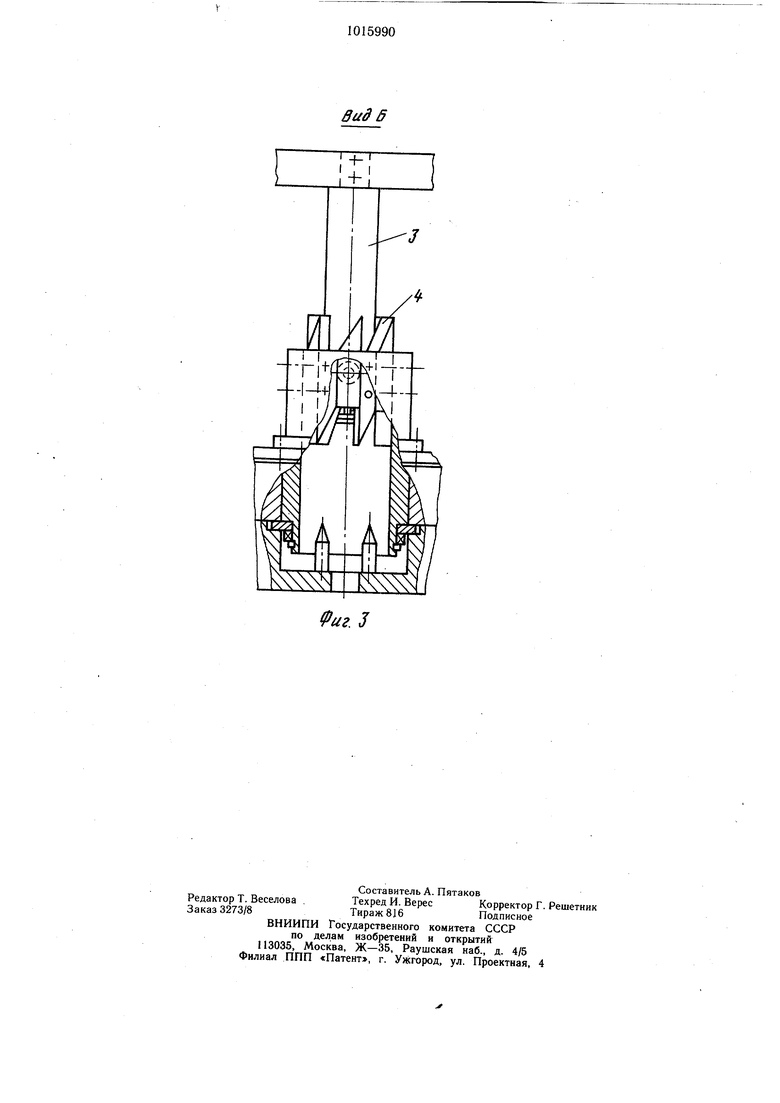
и цилиндрический подвижный кулачок 4 в свое первоначальное положение, закрывая ролики 6 своими клиновыми копирами В (фиг. 3). Затем верхняя плита 1 опускается вниз при неподвижном захватном органе 11.
Далее ц,икл повторяется.
По сравнению с базовым объектом предлагаемое устройство более надежно в работе, так как подготовка к работе осуществляется во время холостого хода пуансона и устройство может быть остановлено в случае прломки с помощью простых блокировок.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи заготовок в зону обработки | 1974 |
|
SU536869A1 |
| Демпфер для подающей каретки штампа | 2020 |
|
RU2756457C1 |
| Устройство для отделочной обработки наружных поверхностей тел вращения | 1988 |
|
SU1627384A1 |
| Роторная машина | 1981 |
|
SU1038040A1 |
| Устройство для подачи и удаления заготовок из рабочей зоны пресса | 1981 |
|
SU986550A1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU946733A1 |
| Устройство для вырубки заготовок из плоского материала | 1983 |
|
SU1119757A1 |
| Транспортно-технологический ротор | 1987 |
|
SU1498565A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Устройство для вырубки заготовокиз лиСТОВыХ МАТЕРиАлОВ | 1978 |
|
SU802071A2 |
УСТРОЙСТВО ДЛЯ ПОДАЧИ ЗАГОТОВОК В ЗОНУ ОБРАБОТКИ, содержащее нижнюю и верхнюю плиту с вертикальной стойкой, прерывисто вращающийся в горизонтальной плоскости захватный орган, установленный на вертикальной стойке подвижный цилиндрический кулачок с клиновыми копирами, взаимодействующий с захватным органом, втулку, связанную с захватным органом и имеющую на внутренней поверхности толкатели с клиновыми поверхностями, отличающееся тем, что, с целью повышения надежности в работе, оно снабжено горизонтальной осью с роликами, установленной в жестко соединенной с верхней плитой центральной стойке, коническими штырями, установленными в нижней плите и взаимодействующими с клиновыми копирами подвижного цилиндрического кулачка, а в противолежащих друг другу клиновых копирах подвижного цилиндрического кулачка с внутренней стороны выполнены выборки и пазы на глубину, превышающую высоту клиновых копиров, в которых размещены упомянутые ролики, осевое сечение которых равно поперечному сечению выборки копира (Л кулачка, при этом промежутки между кли.новыми копирами выполнены сквозными. /ff / I ХьП ел ) UD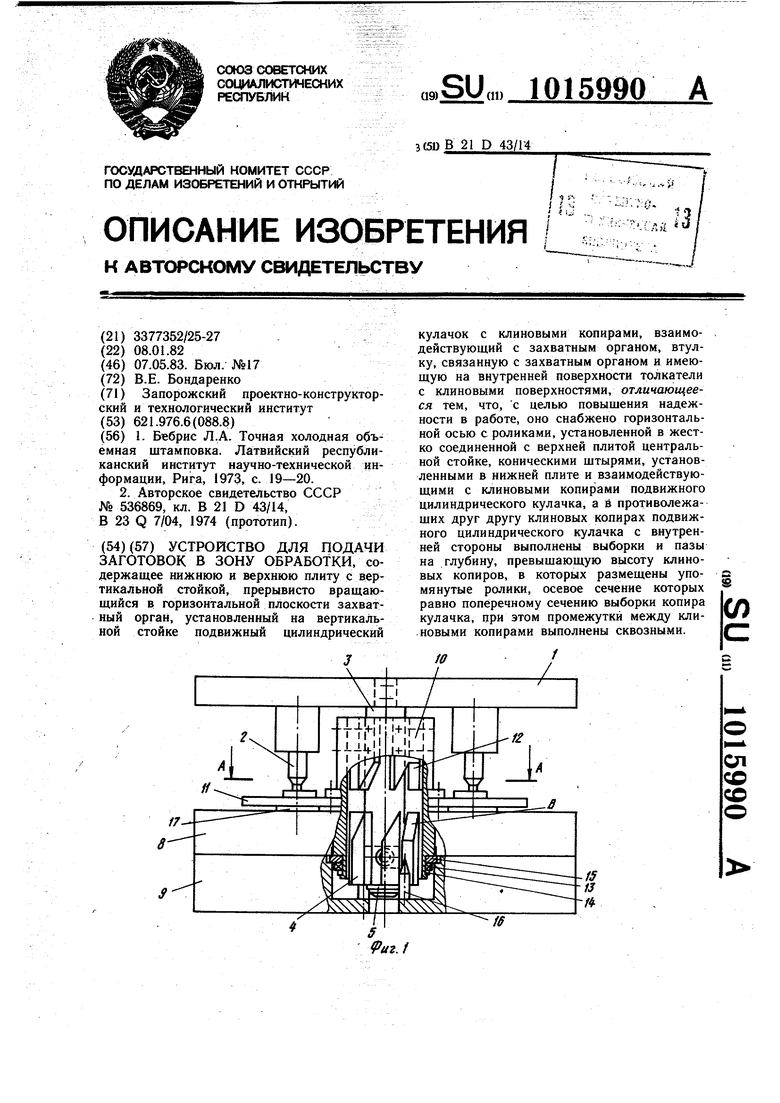
вид б
Фиг. 3
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бвбрис Л.А | |||
| Точная холодная объемная штамповка | |||
| Латвийский республиканский институт научно-технической информации, Рига, 1973, с | |||
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для подачи заготовок в зону обработки | 1974 |
|
SU536869A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
