ю
о со ю
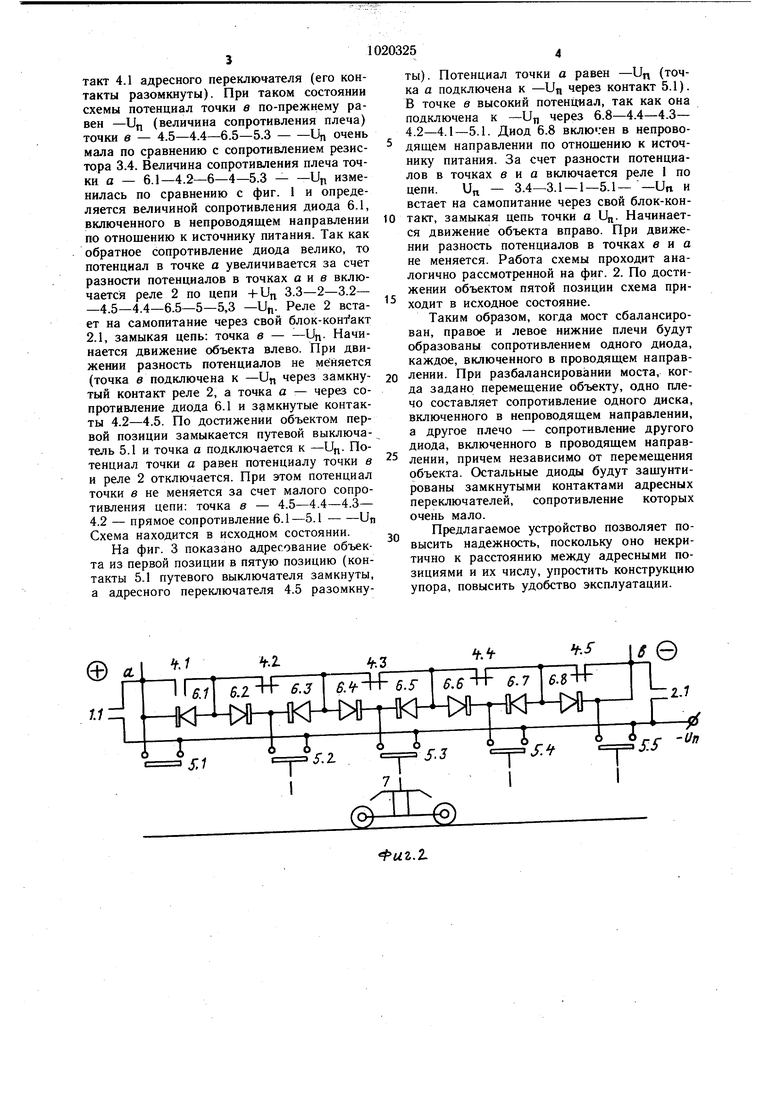
СП Изобретение относится к автоматизации промышленного транспорта и может быть использовано, например для выбора направления движения штабелеров, подъемников. Известно устройство, содержащее задатчик адреса, подвижный контакт которого соединен через включенные в прямом и обратном направлениях диоды с одним из выводов обмоток реле направления перемещения, другие выводы которых поключены к одним из выводов источника питания, подключенных другими выводами к последовательно соединенным размыкающим контактам путевых выключателей, взаимодействующих с лыжей, длина которой превыщает расстояние между путевыми выключателями на двойную длину выбега объекта, выводы соединенных между собой путевых выключателей соединены с неподвижными контактами задатчика адреса 1. Недостатком указанного устройства является то, что длина лыжи должна превыщать расстояние между путевыми выключателями на двойную длину выбега объекта. Это усложняет конструкцию устройства, ограничивает области его применения. Наиболее близким к предлагаемому является устройство, содержащее реле направления движения, обмотки которых соединены одними своими выводами непосредственно, а другими - через встречно включенные диоды, взаимодействующие с установленным на объекте упором путевые выключатели с замыкающими контактами, один из выводов каждого из которых соединен с одним из выводов источника питания, а другой через диод - с одним из выводов адресного переключателя предществующей адресной позиции 2. Недостатком известного устройства является то, что при увеличении числа позиций адресования увеличивается сопротивление в цепи питания реле направления движения. Это ограничивает область применения устройства. Цель изобретения - расширение области применения устройства. Поставленная цель достигается тем, что устройство для автоматического выбора направления движения объекта снабжено дополнительными диодами, реле выполнены с дополнительными замыкающими контактами, а адресные переключатели выполнены с размыкающими контактами и соединены между собой последовательно, причем второй вывод каждого из путевых выключателей соединен через дополнительный диод с другим выводом адресного переключателя последующей адресной позиции, свободные выводы адресных переключателей и вторые выврды путевых выключателей первой и последней адресных позиций, вводы обмоток реле направления движения, замыкающие контакты которых подключены параллельно замыкающим контактам путевых выключателей первой и последней адресных позиций, соединены через резисторы с другим,.выводом источника питания. На фиг. 1 приведена принципиальная схема устройства на позиции адресования; на фиг. 2 - состояние цепей управления при адресовании объекта на 1 позицию;, на фиг. 3 состояние цепей управления при адресовании объекта на 5 позицию. Устройство содержит реле 1 с контактами 1.1 и 2 с контактами 2.1, направление движения обмотки которых через встречно включенные диоды 3.1, 3.2 и резисторы 3.3, 3.4 соединены с выводом источника питания, адресные переключатели, размыкающие контакты 4.1-4.5 которых соединены между собой последовательно и подключены к резисторам 3.3 и 3.4 конечные выключатели с замыкающими контактами 5.1-5.5. одни из выводов которых подключен к выводу - Un источника питания, а другой через диоды 6.1-6.8 - к выводам соединенных между собой размыкающих контактов 4.1-4.5 адресных переключателей. Параллельно замыкающим контактам 5.1 и 5.5 путевых выключателей, с которыми взаимодействует упор 7 на неподвижном объекте, подключены замыкающие контакты 1.1 и 2.1 реле 1,2 направления движения. Устройство работает следующим обраПил-ание реле 1 и 2 происходит по мостовой схеме. Обмотки реле включены в диагональ моста, образованного балластными резисторами (верхние плечи моста) н совместным включением контактов 4.1-4.5 адресных переключателей и 5.1-5.5 с диодами 6.1-6.8 (нижние плечи моста). В другую диагональ моста (общая точка путевых выключателей) включен источник питания. На фиг. 1 показано положение объекта на третьей позиции (путевой выключатель 5.3 нажат). Нажат адресный переключатель 4.3 (его контакты показаны разомкнутыми). При таком состоянии схемы потенциал точки а определяется величиной сопрютивления плеча точки а - 4.1-4.2-6.4- 5.3Uj,. Так как диод 6.4 включен в проводящем направлении, то сопротивлением всей этой точки можно пренебречь по сравнению с сопротивлением резистора 3.3 и потенциал точки а равен - Un- Аналогично потенциал точки в также равен -Un, т. е. разность потенциалов между точками а н в равна 0. Мост находится в равновесии. Реле 1 и 2 выключены. Схема находится в исходном состоянии. На фиг. 2 показано положение объекта в той же третьей позиции, но нажат контакт 4.1 адресного переключателя (его контакты разомкнуты). При таком состоянии схемы потенциал точки в по-прежнему равен -и, (величина сопротивления плеча) точки в - 4.5-4.4-6.5-5.3U очень мала по сравнению с сопротивлением резистора 3.4. Величина сопротивления плеча точки а - 6.1-4.2-6-4-5.3 - -и,, изменилась по сравнению с фиг. 1 и определяется величиной сопротивления диода 6.1, включенного в непроводящем направлении по отношению к источнику питания. Так как обратное сопротивление диода велико, то потенциал в точке а увеличивается за счет разности потенциалов в точках айв включается реле 2 по цепи +и„ 3.3-2-32- -4.5-4.4-6.5-5-5,3 -U. Реле 2 встает на самопитание через свой блок-KOHfaKT 2.1, замыкая цепь: точка в - -Un. Начи нается движение объекта влево. При движении разность потенциалов не меняется (точка в подключена к -и„ через замкнутый контакт реле 2, а точка а - через сопротивление диода 6.1 и замкнутые контак1Ы 4.2-4.5. По достижении объектом первой позиции замыкается путевой выключатель 5.1 и точка а подключается к -U. Потенциал точки а равен потенциалу точки в и реле 2 отключается. При этом потенциал точки в не меняется за счет малого сопротивления цепи; точка в - 4.5-4.4-4.3 4.2 - прямое сопротивление 6.1-5.1Un Схема находится в исходном состоянии. На фиг. 3 показано адресование объекта из первой позиции в пятую позицию (контакты 5.1 путевого выключателя замкнуты, а адресного переключателя 4.5 разомкнуты). Потенциал точки а равен -Un (точка а подключена к -Un через контакт 5.1). В точке в высокий потенциал, так как она подключена к -Un через 6.8-4.4-4.3- 4.2-4.1-5.1. Диод 6.8 вклю-ген в непроводящем направлении по отношению к источнику питания. За счет разности потенциалов в точках в и а включается реле 1 по цепи. и„ - 3.4-3.1-1-5.1- -Un и встает на самопитание через свой блок-контакт, замыкая цепь точки а и„. Начинается движение объекта вправо. При движении разность потенциалов в точках в и а не меняется. Работа схемы проходит аналогично рассмотренной на фиг. 2. По достижении объектом пятой позиции схема приходит в исходное состояние. Таким образом, когда мост сбалансирован, правое и левое нижние плечи будут образованы сопротивлением одного диода каждое, включенного в проводящем направлении. При разбалансировании моста, когда задано перемещение объекту, одно плечо составляет сопротивление одного диска, включенного в непроводящем направлении а другое плечо - сопротивление другого диода, включенного в проводящем направлении, причем независимо от перемещения объекта. Остальные диоды будут зашунтированы замкнутыми контактами адресных переключателей, сопротивление которых очень мало. Предлагаемое устройство позволяет повысить надежность, поскольку оно некриично к расстоянию между адресными поициями и их числу, упростить конструкцию пора, повысить удобство эксплуатации.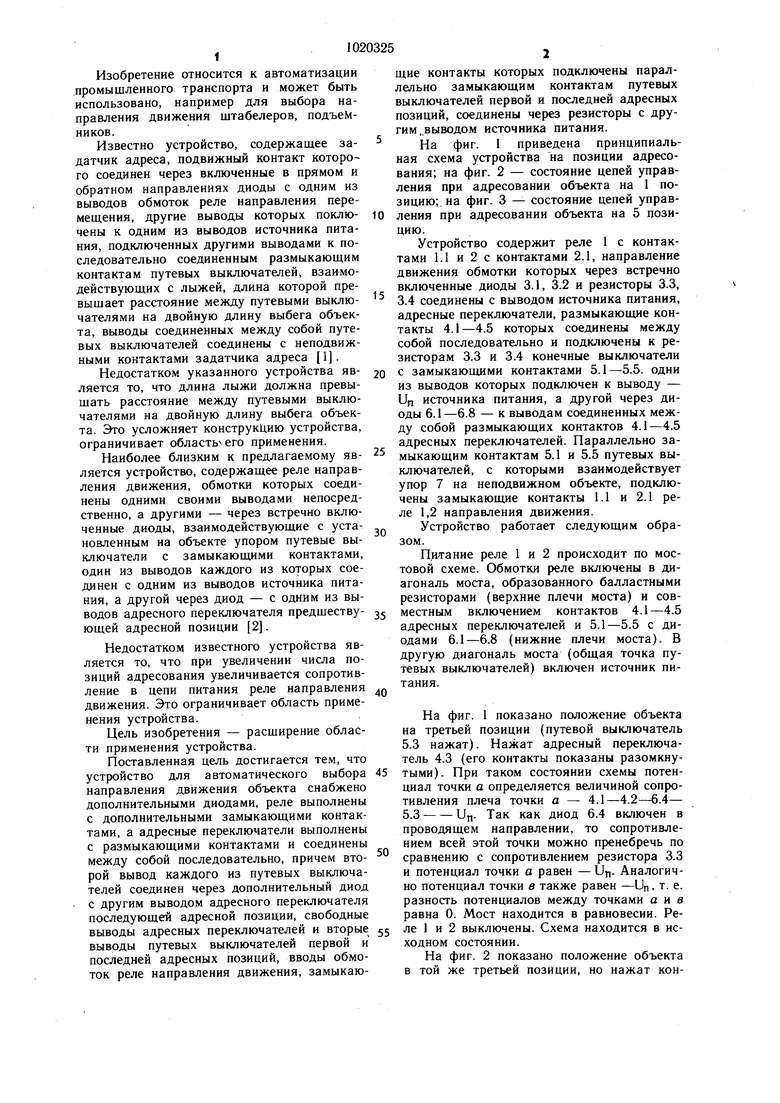
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического выбора направления движения объекта | 1985 |
|
SU1263598A1 |
| Устройство для автоматического адресования объекта по кратчайшему пути | 1986 |
|
SU1357321A1 |
| Устройство для позиционного управления объектом | 1986 |
|
SU1371955A1 |
| Устройство для автоматического выбора направления движения объекта | 1985 |
|
SU1288136A1 |
| Устройство для автоматического выбора направления движения объекта | 1983 |
|
SU1146260A1 |
| Устройство для автоматического выбора направления движения объекта | 1984 |
|
SU1164166A1 |
| Устройство для автоматического адресования объекта | 1985 |
|
SU1273316A1 |
| Устройство для автоматического выбора направления движения объекта | 1988 |
|
SU1518249A1 |
| Устройство для автоматического выбора направления движения объекта | 1984 |
|
SU1184768A1 |
| Управляющее устройство транспортного механизма | 1982 |
|
SU1022923A1 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВЫБОРА НАПРАВЛЕНИЯ ДВИЖЕНИЯ ОБЪЕКТА, содержащее реле направления движения, блоки которых соединены одними выводами непосредственно, а другими - через встречно включенные диоды, взаимодействующие с , установленным на объекте упором путевые, выключатели с замыкающими контактами, один из выводов каждого из которых соединен с одним из выводов источника питания, а другой через диод - с одним из выводов адресного переключателя предшествующей адресной позиции, отличающееся тем, что, с целью расщирення области применения, оно снабжено дополнительными диодами, реле выполнены с дополнительными замыкающими контактами, а адресные переключатели выполнены с размыкающими контактами и соединены между собой последовательно, причем второй вывод каждого из путевых выключателей соединен через дополнительный диод с другим выводом адресного переключателя последующей адресной позиции, а свободные выводы адресных переключателей и вторые выводы путевых выключателей первой и последней адресных позиций, вводы обмоток реле направления движения, замыкаю(Л щие контакты которых подключены параллельно замыкающим контактам путевых выключателей первой и последней адресных позиций, соединены через резисторы с другим выводом источника питания.
иг.2.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматического выбора направления движения объекта | 1977 |
|
SU640927A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для автоматического выбора направления движения объекта | 1973 |
|
SU455901A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
