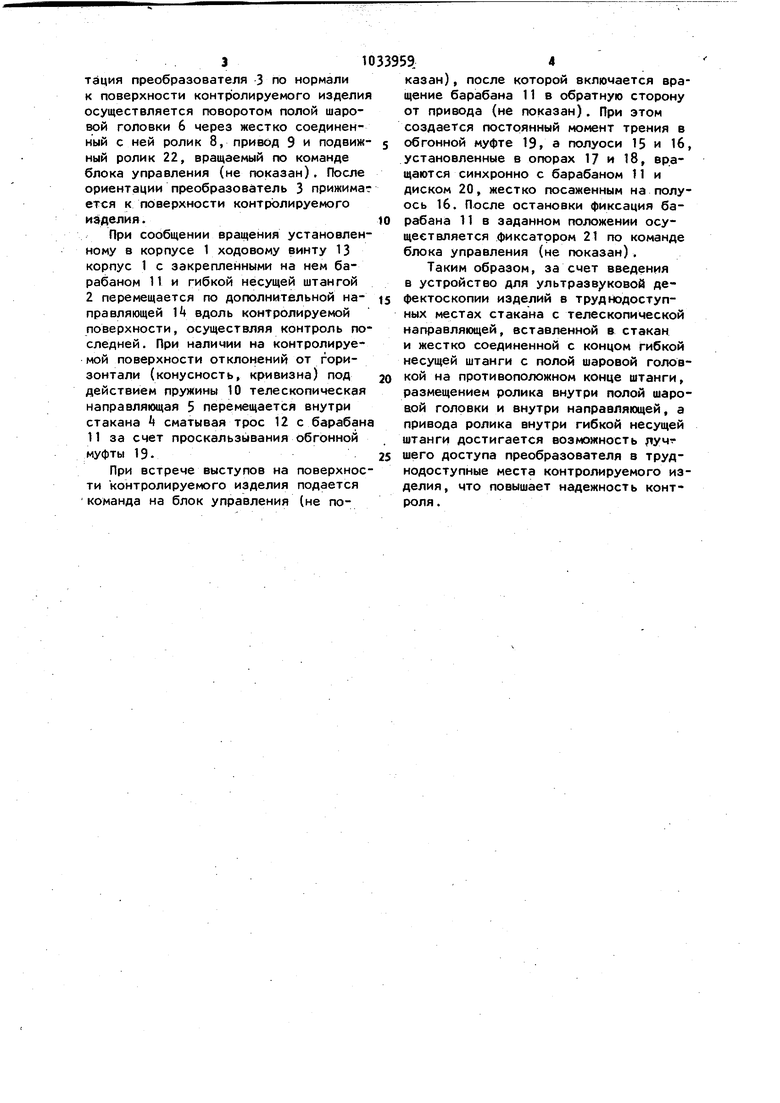
Изобретение относится к неразрушающим методам контроля и может быть использовано для контроля труднодоступных мест изделий. Известно устройство для перемещения датчика дефектоскопа, содержащее механизм для егс вращения вокруг контролируемого изделия и механизм для движения датчика вдоль него 1}. Однако данное устройство применим только для контроля цилиндрических поверхностей изделий определенного диаметра, так как имеется жесткая связь между центром вращения датчика и поверхностного контролируемого изделия, и не может быть использовано для контроля труднодоуступных мест контролируемого изделия. Наиболее близким оо технической сущности к предлагаемому является устройство для ультразвуковой дефектоскопии изделий в труднодоступных местах, содержащее корпус и соединен ную с ним гибкую несущую штангу с преобразователем на конце С2, Недостатком известного устройства является низкая надежность контроля, обусловленная тем, что его гибкую несущую штангу можно изгибать только в одной плоскости - в плоскости продольной оси устройства без возможности изгиба в поперечной плоскости .устройства. Цель изобретения - повышение надежности контроля. Указанная цель достигается за счет того, что устройство для ультразвуковой дефектоскопи изделий в труднодоступных местах, содержащее корпус и соединенную с ним гибкую не сущую штангу с преобразователем на конце, снабжено жестко прикрепленным к корпусу стаканом, подвижно вставле ной в стакан и жестко соединенной с концом гибкой несущей штанги телескопической направляющей для продоль ного перемещения штанги, размещенной на противоположном конце гибкой несу щей штанги полой шаровой головкой, шарнирно соединенным с ней держателе преобразователя, жестко соединенным с внутренней частью шаровой головки роликом, приводом ролика, расположен ной внутри стакана пружиной, установ ленным в корпусе с возможностью вращения барабаном с тросом, свободный конец которого соединен со штангой, и расположенными в корпусе ходовым винтом и дополнительной направляюще для поперечного перемещения штанги, .которая выполнена полой, а привод ролика размещен в последней. На фиг. 1 представлено устройство для ультразвуковой дефектоскопии изделий, общий вид; на фиг. 2 - то же, вид А-А на фиг. 1. Устройство для ультразвуковой дефектоскопии изделий в труднодоступных местах содержит корпус 1, соединенную с ним гибкую несущую штангу 2 с преобразователем 3 на конце, жестко прикрепленный к корпусу 1 стакан k, подвижно вставленную в стакан k и жестко соединенную с концом гибкой несущей штанги 2 телескопическую направляющую 5 для продольного перемещения штанги 2, размещенную на противоположном конце гибкой несущей штанги 2 полую шаровую головку 6, шарнир- но соединенный с ней держатель 7 преобразователя 3, жестко соединенный с внутренней частью шаровой головки 6 ролик 8, привод 9 ролика 8, расположенную внутри стакана k пружину 10, установленный в корпусе 1 с возможностью вращения барабан 11 с тросом 12, свободный конец которого соединен со штангой 2, и расположенные в корпусе 1 ходовой винт 13 и дополнительная направляющая для поперечного перемещения штанги.2, которая выполнена полой и в которой размещен привод 9 ролика 8. Кроме того, устройство содержит полуоси 15 и 1б, размещенные на опорах 17 и 18 внутри барабана 11, обгонную муфту 19, соединяющую полуоси 15, ,16 и обеспечивающую в процессе работы свободное проскальзывание барабана 11 в одном направлении и постоянный момент трения в другом направлении, жестко соединенный с барабаном 11 диск 20,взаимодействующий q последним фиксатор 21 и подвижный ролик 22, шарнирно установленный в телескопической направляющей 5. Устройство для перемещения датчика дефектоскопа работает следующим образам. Преобразователь 3, закрепленный в держателе 7, жестко соединенном с поой шаровой головкой 6, подводится в труднодоступное место контролируемого изделия за счет изгиба гибкой несущей штанги 2, сохраняющей после изгиба изогнутую по месту форму за счет конструктивного выполнения гибкой несущей штанги 2. Дополнительная ориентация преобразователя 3 по нормали к поверхности контролируемого изделия осуществляется поворотом полой шароЕюй головки 6 через жестко соединенный с ней ролик 8, привод 9 и подвижный ролик 22, вращаемый по команде блока управления (не показан). После ориентации преобразователь 3 прижимаг ется к поверхности контролируемого изделия.
При сообщении вращения установленному в корпусе 1 ходовому винту 13 корпус 1 с закрепленными на нем барабаном 11 и гибкой несущей штангой 2 перемещается по дополнительной направляющей И вдоль контролируемой поверхности, осуществляя контроль последней . При наличии на контролируемой поверхности отклонений от горизонтали (конусность, кривизна) под действием пружины 10 телескопическая направляющая 5 перемещается внутри стакана сматывая трос 12 с барабана 11 за счет проскальзывания обгонной муфты 19При встрече выступов на поверхности контролируемого изделия подается команда на блок управления (не показан) , после которой включается вращение барабана 11 в обратную сторону от привода (не показан). При этом создается постоянный момент трения в обгонной муфте 19, а полуоси 15 и 16, установленные в опорах 17 и 18, вращаются синхронно с барабаном 11 и диском 20, жестко посаженным на полуось 16. После остановки фиксация барабана 11 в заданном положении осуществляется фиксатором 21 по команде блока управления (не показан).
Таким образом, за счет введения в устройство для ультразвуковой дефектоскопии изделий в труднодоступных местах стакана с телескопической направляющей, вставленной в стакан и жестко соединенной с концом гибкой несущей штанги с полой шаровой головкой на противоположном конце штанги, размещением ролика внутри полой шаровой головки и внутри направляющей, а привода ролика внутри гибкой несущей штанги достигается возможность пучт шего доступа преобразователя в труднодоступные места контролируемого изделия, что повышает надежность контроля .
В
ь//
ff
/-/
fff ггЛ
/7 /
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дефектоскопии цилиндрических изделий | 1991 |
|
SU1797048A1 |
| Сканирующее устройство для неразрушающего контроля цилиндрических полостей | 1980 |
|
SU911308A1 |
| Способ дефектоскопии роторов турбин с тепловыми и уплотнительными канавками по окружности и устройство для его осуществления | 1989 |
|
SU1777070A1 |
| Манипулятор для внутреннего контроля цилиндрических резервуаров | 1985 |
|
SU1442089A3 |
| Сканирующее устройство для ультразвукового контроля сварных швов изделий | 1987 |
|
SU1497560A1 |
| Самоходная тележка | 1978 |
|
SU749726A1 |
| Передвижная установка для ультразвукового контроля изделий | 1984 |
|
SU1231458A1 |
| Устройство для ультразвукового контроля закрепления труб в трубной решетке | 1985 |
|
SU1270686A1 |
| Устройство для контроля трубопроводов | 1984 |
|
SU1317356A1 |
| Устройство для внутреннего контроля полых тел вращения переменных диаметров | 1985 |
|
SU1280998A1 |
УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОПИИ ИЗДЕЛИЙ В ТРУДНОДОСТУПНЫХ WECTAX, содержащее корпус и соединенную с ним гибкую несущую штангу с преобразователем на конце, 6 т л И ч а ю щ е ее я тем, что. с целью повышения надежности контроля, оно снабжено жестко прикрепленным к корпусу стаканом, подвижно вставленной в стакан и жестко соединенной с концом Гибкой несущей штанги телескопической направляющей для продольного перемещения штанги, размещенной на противоположном конце гибкой несущей штанги полой шаровой головкой, шарнирно соединенным с ней держателем преобразователя, жестко соединенным с внутренней частью шаровой головки роликом, приводом ролика , расположенной внутри стакана пружиной, устаноштенны м в корпусе с возможнбст ью вращения барабаном с трюсом, свйбодный конец которого соединен со штайгой, и расположенными W в корпусе ходовым винтом и дололни тельной направляющей для поперечного перемещения штанги, которая выполнена полсзй, а привод ролика размещен а последней . 00 00 со ся со
| IV Авторское, свидетельство СССР Н 198778 «ел | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Дорофеев А.А | |||
| Казаманов Ю.Г | |||
| Электромагнитная дефектоскопия | |||
| М., Маи|Иностроениё, 1980 | |||
| с | |||
| Способ образования азокрасителей на волокнах | 1918 |
|
SU152A1 |
| Счетчик оборотов горизонтального вала машины | 1925 |
|
SU691A1 |
| (З) | |||
