Изобретение относится к области машиностроения и предназначено для автоматизации технологических процессов загрузки и выгрузки изделий типа тел вращения, обрабатываемых на металлорежущих многооперационных станках.
Известны автооператоры, содержащие основание, установленную с возможностью поворота в вертикальной плоскости от силового цилиндра стрелу с двухзахватным механизмом зажима, установленным с возможностью вращательного движения при помощи зубчато-реечной передачи (А.с. №1379055, кл. МПК В 23/Q 7/04).
Этот автооператор имеет низкую производительность, т.к. производится загрузка одного изделия, низкую точность позиционирования, т.к. изделие берется захватом с питателя и не ориентируется, низкую надежность работы, большие габариты, т.к. подача рабочей жидкости к скалкам-поршням перемещения захватного устройства осуществляется подвижными, качающимися рукавами, а рукава подачи рабочей жидкости к силовым цилиндрам привода зажима губок двухзахватного механизма зажима вращаются вокруг двухзахватного механизма зажима, что ведет к их перехлестыванию, ограничивает возможность входа в пространство станка, а также низкий уровень защиты от стружки и смазочно-охлаждающей жидкости, т.к. расположение и движение двухзахватного механизма зажима в данной конструкции не позволяет входить в рабочую зону станка без пересечения защитных устройств, предназначенных для сбора и отвода стружки и смазочно-охлаждающей жидкости, что вынуждает оставлять рабочую зону постоянно открытой и не препятствует выходу стружки и смазочно-охлаждающей жидкости за пределы станка.
Заявляемое техническое решение направлено на повышение производительности, надежности работы, уменьшение габаритов, улучшение условий обслуживания автооператора, повышение точности позиционирования изделий.
Для достижения поставленной цели автооператор металлорежущих станков, содержащий основание, на котором с возможностью поворота от силового цилиндра установлен рычаг с размещенным на нем двухзахватным устройством с корпусом и симметрично установленными относительно оси автооператора захватами, снабжен устройством сбора стружки и смазочно-охлаждающей жидкости и ограничителем угла поворота рычага, выполненным в виде упора, двухзахватное устройство установлено с возможностью движения по траектории, исключающей пересечение зоны устройств сбора стружки и смазочно-охлаждающей жидкости и возвратно-поступательного перемещения от силового цилиндра посредством скалок, размещенных в каретке, имеющей полости и неподвижно закрепленной на конце рычага, захваты двухзахватного устройства направлены в одну сторону, а каждый из них выполнен в виде защитного каркаса с ориентирующим гнездом предварительной установки, ориентирующим центром и подвижными губками в виде двуплечих рычагов, одно плечо каждого из которых связано со штоком силового цилиндра, встроенного в корпус двухзахватного устройства, при этом рычаг выполнен с каналами для подачи рабочей жидкости к силовым цилиндрам, встроенным в корпус двухзахватного устройства, и силовому цилиндру для возвратно-поступательного перемещения двухзахватного устройства, упомянутые каналы сообщены с одной стороны через шарнир-распределитель с неподвижными, стационарно установленными рукавами системы подачи рабочей жидкости, а с другой стороны - с соответствующими полостями в каретке, причем корпус двухзахватного устройства снабжен жестко связанными с ним с одной стороны и установленными параллельно скалкам с возможностью возвратно-поступательного перемещения в полостях каретки полыми стержнями для подачи рабочей жидкости из полостей каретки к упомянутым силовым цилиндрам, встроенным в корпус двухзахватного устройства, а с другой стороны упомянутые стержни выступают за пределы каретки на величину хода двухзахватного устройства.
Выполнение каналов для подачи рабочей жидкости к силовым цилиндрам в стенке трубы и ребрах рычага, полости в каретке и установка в ней полых стержней, взаимосвязанных с силовыми цилиндрами, обеспечивает поддерживание постоянного давления в рабочих полостях встроенных силовых цилиндров двухзахватного устройства и силовому цилиндру для возвратно-поступательного перемещения двухзахватного устройства и исключает необходимость установки подвижных рукавов подачи рабочей жидкости, наличие которых затрудняло бы проход каретки к зажимному приспособлению, уменьшает габариты каретки, т.к. забирает функцию подвода рабочей жидкости у скалок-штоков. Вместе с тем, двухзахватное устройство при повороте в рабочее положение из положения загрузки автооператора совершает движение по траектории, обеспеченное рычагом, не пересекая защитных устройств, предназначенных для сбора и отвода стружки и смазочно-охлаждающей жидкости, позволяя тем самым захватному устройству произвести загрузку изделия в станок в горизонтальной плоскости с наименее возможным продольным ходом, с более лучшими условиями защиты зоны обслуживания станка.
В силу того, что конструкция предлагаемого автооператора компактна, изделие надежно и точно закреплено, появляется возможность загрузки и выгрузки двух и более изделий одновременно за счет увеличения количества захватов, значительно увеличивая производительность автооператора металлорежущих станков.
На фиг.1 изображен автооператор, общий вид.
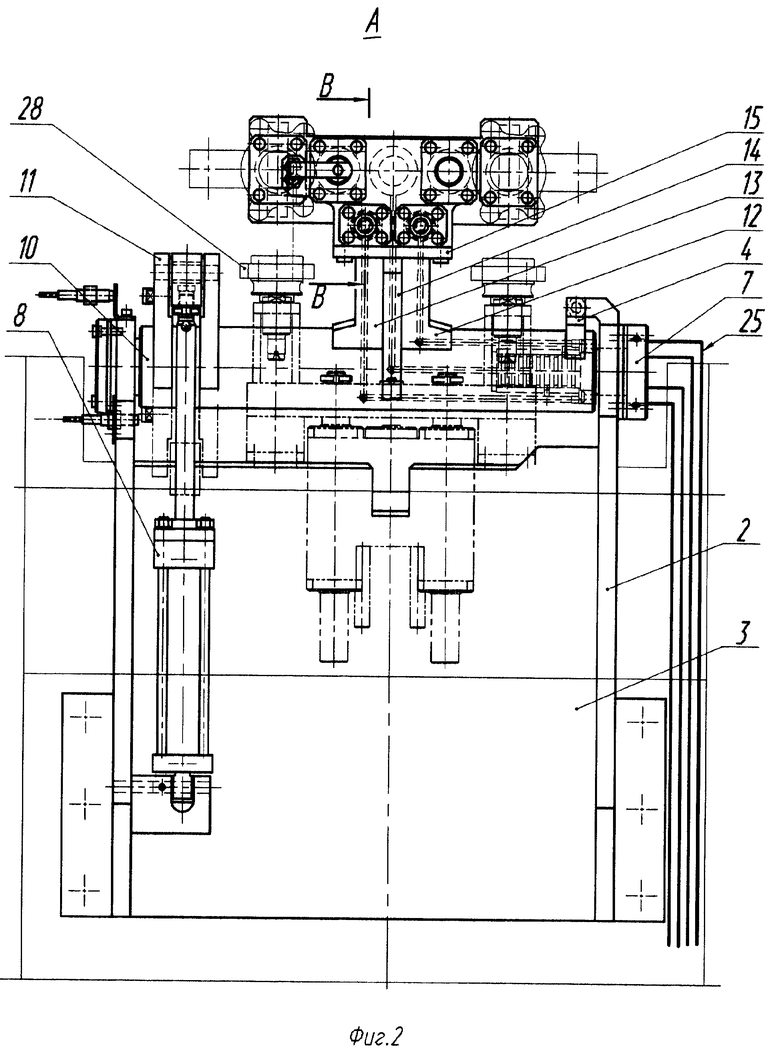
На фиг.2 - вид А, на фиг.1.
На фиг.3 - разрез по В-В на фиг.2.
Автооператор монтируется на передней плоскости станка на позиции загрузки-выгрузки и представляет собой неподвижное основание, состоящее из двух стоек 1, 2, жестко соединенных между собой соединительной плитой 3, упора ограничения угла поворота рычага 4, устройства сбора стружки и смазочно-охлаждающей жидкости 5. В верхней части стоек установлены поворотный шарнир 6 и поворотный шарнир-распределитель 7. На шарнирах расположен с возможностью поворота от силового цилиндра 8 посредством шарнира 9 рычаг, состоящий из трубы 10 с жестко закрепленными на ней двумя проушинами 11, тремя ребрами 12, 13, 14 и верхней плитой 15, с кареткой 16, неподвижно закрепленной на конце рычага. В каретке размещены скалки 17 с возможностью возвратно-поступательного перемещения от силового цилиндра 18. На скалках неподвижно закреплено двухзахватное устройство, состоящее из корпуса 19 с расположенными в нем двумя захватами, установленными симметрично относительно оси автооператора и направлеными в одну сторону, каждый из которых выполнен в виде защитного каркаса с ориентирующим гнездом предварительной установки 20, ориентирующего центра 21, двух подвижных губок 22, расположенных на осях 23 и представляющих собой двуплечие рычаги, одно плечо каждого из которых связано со штоком встроенного силового цилиндра 24. Подвод рабочей жидкости к силовому цилиндру 18 выполнен от неподвижных рукавов 25 посредством каналов, проходящих от шарнира-распределителя 7, по каналам в стенке трубы рычага 10, ребрах рычага 12, 13, 14, верхней плите 15 и к каналам каретки 16, а к встроенным силовым цилиндрам захватов двухзахватного устройства - из каналов рычага в полости 26 каретки, откуда через полые стержни 27, установленные параллельно скалкам с возможностью возвратно-поступательного перемещения в полостях каретки 16 и с одной стороны жестко связанные с корпусом 19 двухзахватного устройства, а с другой стороны выступающие за пределы каретки на величину хода двухзахватного устройства, и каналы в корпусе 19 двухзахватного устройства.
Автооператор работает следующим образом.
Изделия 28 типа тела вращения устанавливаются в ориентирующие гнезда предварительной установки 20 вертикально на ориентирующий центр 21 захватов двухзахватного устройства, находящегося в положении загрузки, после чего подвижные губки 22 захватов, представляющие собой двуплечие рычаги, одно плечо каждого из которых связано со штоком силового цилиндра, под воздействием встроенных силовых цилиндров посредством штоков 24 зажимают изделия. Далее под воздействием силового цилиндра 8 рычаг с кареткой 16 с расположенным на нем посредством скалок 17 двухзахватным устройством с изделиями 28 поворачивается, устанавливаясь на упор 4. Затем двухзахватное устройство с помощью силового цилиндра 18 совершает ход на величину, необходимую для размещения изделий 28 в зажимном приспособлении станка, после чего подвижные губки 22 захватов под воздействием штоков 24 встроенных силовых цилиндров двухзахватного устройства раскрываются, и двухзахватное устройство совершает обратный ход. Загрузка изделий 28 в станок для дальнейшей механической обработки произведена.
Выгрузка окончательно обработанных изделий 28 производится в обратном порядке.
Двухзахватное устройство совершает ход на величину, необходимую для захвата изделий 28, находящихся в зажимном приспособлении станка, при этом изделия 28 размещаются в каркасах захватов, попадая через ориентирующие гнезда предварительной установки 20 в ориентирующий центр 21, после чего подвижные губки 22 под воздействием штоков 24 встроенных силовых цилиндров двухзахватного устройства зажимают изделия 28 и двухзахватное устройство с помощью силового цилиндра 18 совершает обратный ход. Далее под воздействием силового цилиндра 8 рычаг с кареткой 16 с расположенным на нем посредством скалок 17 двухзахватным устройством с изделиями 28 поворачивается в шарнирах 6, 7 в положение загрузки-выгрузки автооператора, после чего губки 22 захватов под воздействием встроенных силовых цилиндров посредством штоков 24 разжимаются, обработанные изделия извлекаются. При установке следующих изделий цикл повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической смены инструментов | 1988 |
|
SU1636178A1 |
| Устройство для подачи заготовки и удаления отштампованных деталей из рабочей зоны пресса | 1990 |
|
SU1785472A3 |
| Автооператор для сборки корпусных деталей | 1985 |
|
SU1247259A1 |
| Хонинговальный станок для обработки цилиндрических поверхностей | 1986 |
|
SU1563951A2 |
| Устройство для захвата,переноса и укладки стопы деталей | 1985 |
|
SU1326521A1 |
| АГРЕГАТ ДЛЯ ФОРМОВАНИЯ ИЗДЕЛИЙ ИЗ СТРОИТЕЛЬНЫХ СМЕСЕЙ | 2001 |
|
RU2188122C1 |
| Манипулятор | 1983 |
|
SU1151450A1 |
| Агрегатный станок | 1982 |
|
SU1042957A1 |
| Машина для контактной стыковой сварки | 1977 |
|
SU662306A2 |
| Устройство автоматической смены инструмента | 1989 |
|
SU1668095A1 |

Изобретение относится к области машиностроения и может быть использовано для автоматизации на металлорежущих станках технологических процессов загрузки и выгрузки изделий типа тел вращения. Автооператор содержит основание, на котором с возможностью поворота от силового цилиндра установлен рычаг с размещенным на нем двухзахватным устройством с корпусом, симметрично установленные относительно оси автооператора захваты, устройство сбора стружки и смазочно-охлаждающей жидкости и ограничитель угла поворота рычага. Двухзахватное устройство установлено с возможностью движения по траектории, исключающей пересечение зоны устройств сбора стружки и смазочно-охлаждающей жидкости и возвратно-поступательного перемещения от силового цилиндра посредством скалок. Упомянутые скалки размещены в каретке, неподвижно закрепленной на конце рычага. Захваты двухзахватного устройства направлены в одну сторону. Каждый из упомянутых захватов выполнен в виде защитного каркаса с ориентирующим гнездом предварительной установки, ориентирующим центром и подвижными губками в виде двуплечих рычагов. Одно плечо каждого из указанных двуплечих рычагов связано со штоком силового цилиндра, встроенного в корпус двухзахватного устройства. При этом рычаг выполнен с каналами для подачи рабочей жидкости к силовым цилиндрам, встроенным в корпус двухзахватного устройства, и к силовому цилиндру для возвратно-поступательного перемещения двухзахватного устройства. В результате повышается производительность и надежность работы автооператора, уменьшаются его габариты и повышается точность позиционирования изделий. 3 ил.
Автооператор металлорежущих станков, содержащий основание, на котором с возможностью поворота от силового цилиндра установлен рычаг с размещенным на нем двухзахватным устройством с корпусом и симметрично установленными относительно оси автооператора захватами, отличающийся тем, что он снабжен устройством сбора стружки и смазочно-охлаждающей жидкости и ограничителем угла поворота рычага, выполненным в виде упора, двухзахватное устройство установлено с возможностью движения по траектории, исключающей пересечение зоны устройств сбора стружки и смазочно-охлаждающей жидкости, и возвратно-поступательного перемещения от силового цилиндра посредством скалок, размещенных в каретке, имеющей полости и неподвижно закрепленной на конце рычага, захваты двухзахватного устройства направлены в одну сторону, а каждый из них выполнен в виде защитного каркаса с ориентирующим гнездом предварительной установки, ориентирующим центром и подвижными губками в виде двуплечих рычагов, одно плечо каждого из которых связано со штоком силового цилиндра, встроенного в корпус двухзахватного устройства, при этом рычаг выполнен с каналами для подачи рабочей жидкости к силовым цилиндрам, встроенным в корпус двухзахватного устройства, и силовому цилиндру для возвратно-поступательного перемещения двухзахватного устройства, упомянутые каналы сообщены с одной стороны через шарнир-распределитель с неподвижными стационарно установленными рукавами системы подачи рабочей жидкости, а с другой стороны - с соответствующими полостями в каретке, причем корпус двухзахватного устройства снабжен жестко связанными с ним с одной стороны и установленными параллельно скалкам с возможностью возвратно-поступательного перемещения в полостях каретки полыми стержнями для подачи рабочей жидкости из полостей каретки к упомянутым силовым цилиндрам, встроенным в корпус двухзахватного устройства, а с другой стороны упомянутые полые стержни выступают за пределы каретки на величину хода двухзахватного устройства.
| Автооператор | 1986 |
|
SU1379055A1 |
| Автооператор | 1981 |
|
SU971613A1 |
| Автооператор | 1970 |
|
SU355848A1 |
| Двухобмоточный электромагнит с форсировкой | 1986 |
|
SU1430992A1 |

