(Л
ч
00 О N9
/J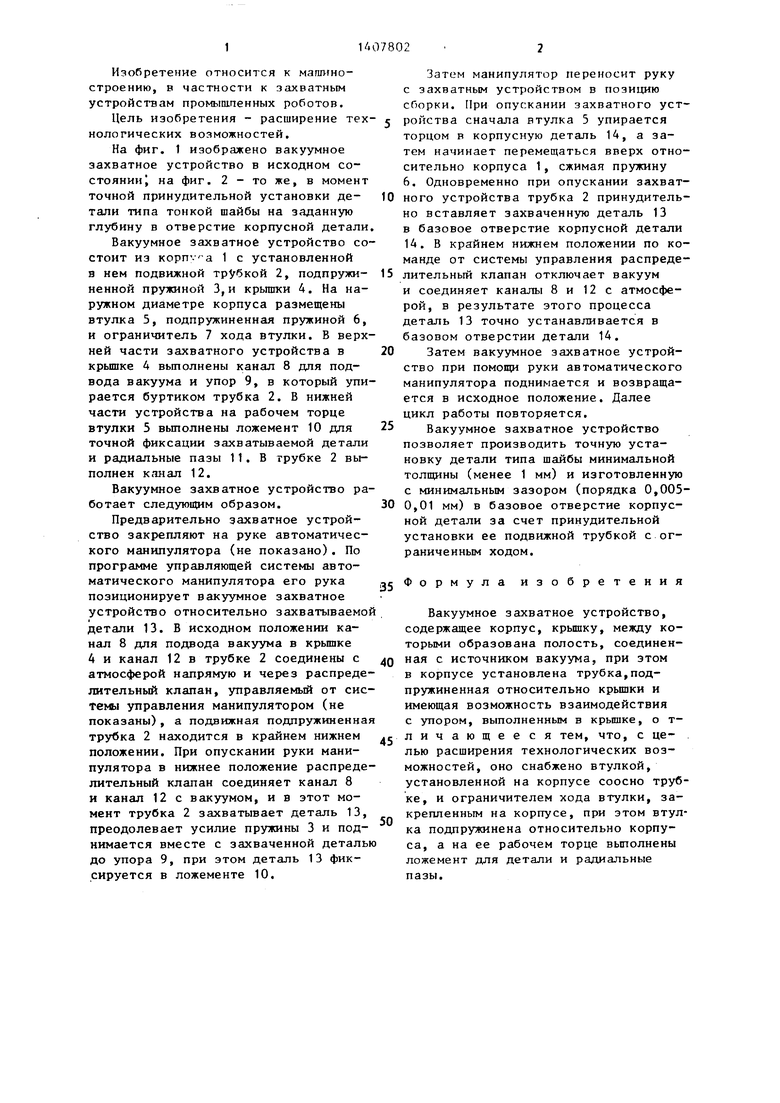
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумное захватное устройство | 1983 |
|
SU1094735A1 |
| Микроманипулятор для установки узлов механизма часов | 1982 |
|
SU1083154A1 |
| Схват | 1986 |
|
SU1315303A1 |
| Вакуумный схват | 1986 |
|
SU1491702A1 |
| Автомат для сборки деталей | 1989 |
|
SU1639936A1 |
| Вакуумное захватное устройство | 1981 |
|
SU1036657A1 |
| Захват манипулятора | 1987 |
|
SU1451001A1 |
| Захватное устройство | 1986 |
|
SU1393627A1 |
| Захватное устройство | 1987 |
|
SU1504093A1 |
| Многопозиционный вакуумный захват | 1988 |
|
SU1662844A1 |

Изобретение относится к области машиностроения, в частности к захватным устройствам роботов. Целью изобретения является расширение технологических возможностей. Для этого корпус 1, в котором установлена подпружиненная трубка 2, снабжен подпружиненной втулкой 5 и ограничителем 7 хода втулки 5. На рабочем торце втулки 5 выполнены ложемент 10 и радиальные пазы 11. При захвате детали 13 трубка 2 втягивается до упора 9.Деталь 13 фиксируется в ложементе 10.Глубина установки детали 13 в базовое отверстие определяется ходом втулки 5. 2 ил.
//////У////
фиг.1
Изобретение относится к машиностроению, в частности к захватным устройствам промышпенных роботов.
Цель изобретения - расширение тех нологических возможностей.
На фиг. 1 изображено вакуумное захватное устройство в исходном состоянии J на фиг. 2 - то же, в момент точной принудительной установки де- тали типа тонкой шайбы на заданную глубину в отверстие корпусной детали
Вакуумное захватное устройство состоит из Kopnv -a 1 с установленной в нем подвижной трубкой 2, подпружи- ненкой пружиной 3, и крышки 4. На наружном диаметре корпуса размещены втулка 5, подпружиненная пружиной 6, и ограничитель 7 хода втулки. В верхней части захватного устройства в крьш1ке 4 вьтолнены канал 8 для подвода вакуума и упор 9, в который упирается буртиком трубка 2. В нижней части устройства на рабочем торце втулки 5 вьтолнены ложемент 10 для точной фиксации захватываемой детали и радиальные пазы 11. В трубке 2 выполнен канал 12.
Вакуумное захватное устройство работает следующим образом.
Предварительно захватное устройство закрепляют на руке автоматического манипулятора (не показано). По программе управляющей системы автоматического манипулятора его рука позиционирует вакуумное захватное устройство относительно захватываемой детали 13. В исходном положении канал 8 для подвода вакуума в крьш1ке 4 и канал 12 в трубке 2 соединены с атмосферой напрямую и через распределительный клапан, управляемый от системы управления манипулятором (не показаны), а подвижная подпружиненная трубка 2 находится в крайнем нижнем положении. При опускании руки манипулятора в нижнее положение распределительный клапан соединяет канал 8 и канал 12 с вакуумом, и в этот момент трубка 2 захватывает деталь 13, преодолевает усилие пружины 3 и поднимается вместе с захваченной деталью до упора 9, при этом деталь 13 фиксируется в ложементе 10.
Затем манипулятор переносит руку с захватным устройством в позицию сборки. При опускании захватного устройства сначала втулка 5 упирается торцом в корпусную деталь 14, а затем начинает перемещаться вверх относительно корпуса 1, сжимая пружину 6. Одновременно при опускании захватного устройства трубка 2 принудительно вставляет захваченную деталь 13 в базовое отверстие корпусной детали 14. В крайнем нижнем положении по команде от системы управления распределительный клапан отключает вакуум и соединяет каналы 8 и 12 с атмосферой, в результате этого процесса деталь 13 точно устанавливается в базовом отверстии детали 14.
Затем вакуумное захватное устройство при помощи руки автоматического манипулятора поднимается и возвращается в исходное положение. Далее цикл работы повторяется.
Вакуумное захватное устройство позволяет производить точную установку детали типа шайбы минимальной толщины (менее 1 мм) и изготовленную с минимальным зазором (порядка 0,005- 0,01 мм) в базовое отверстие корпусной детали за счет принудительной установки ее подвижной трубкой с ограниченным ходом.
Формула изобретения
Вакуумное захватное устройство, содержащее корпус, крьш1ку, между которыми образована полость, соединенная с источником вакуума, при этом в корпусе установлена трубка,подпружиненная относительно крьшжи и имеющая возможность взаимодействия с упором, выполненным в крьш1ке, о т- личающееся тем, что, с целью расширения технологических возможностей, оно снабжено втулкой, установленной на корпусе соосно трубке, и ограничителем хода втулки, закрепленным на корпусе, при этом втулка подпружинена относительно корпуса, а на ее рабочем торце выполнены ложемент для детали и радиальные пазы.
фиг. г
| Вакуумный схват | 1982 |
|
SU1038221A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
