1
Изобретение относится к транспортной технике, а именно к устройствам для автоматической загрузки изделий на подвесной конвейер, и может быть использовано в различных отраслях промышленности при создании автоматизированных поточных линий.
Известна подвеска, включающая ходовую каретку, перемещающуюся по направляющим, раму и грузонесущую площадку D
Недостатком данной подвески является жесткое скрепление грузонесущей площадки к раме, что затрудняет процесс разгрузки и загрузки подвески. Кроме того, груз на подвеске в процессе перемещения конвейера особенно на участках поворота может сместиться и упасть с площадки.
Наиболее близкой по технической сущности и достигаемому результату является подвеска, включающая ходовую каретку, перемещающуюся по направляющим, раму и шарнирно укреплен
ную на ней с возможностью поворота в вертикальной плоскости грузонесущую площадку 2.
Недостатком данной подвески является установка груза на ней без фиксации, что не исключает падения груза с подвески.
Целью изобретения является повышение надежности удержания грузов.
Поставленная цель достигается тем, что грузонесущая площадка выполнена в виде кармана, одна из сторон которого выполнена П-образной и снабжена роликами из фторопласта.
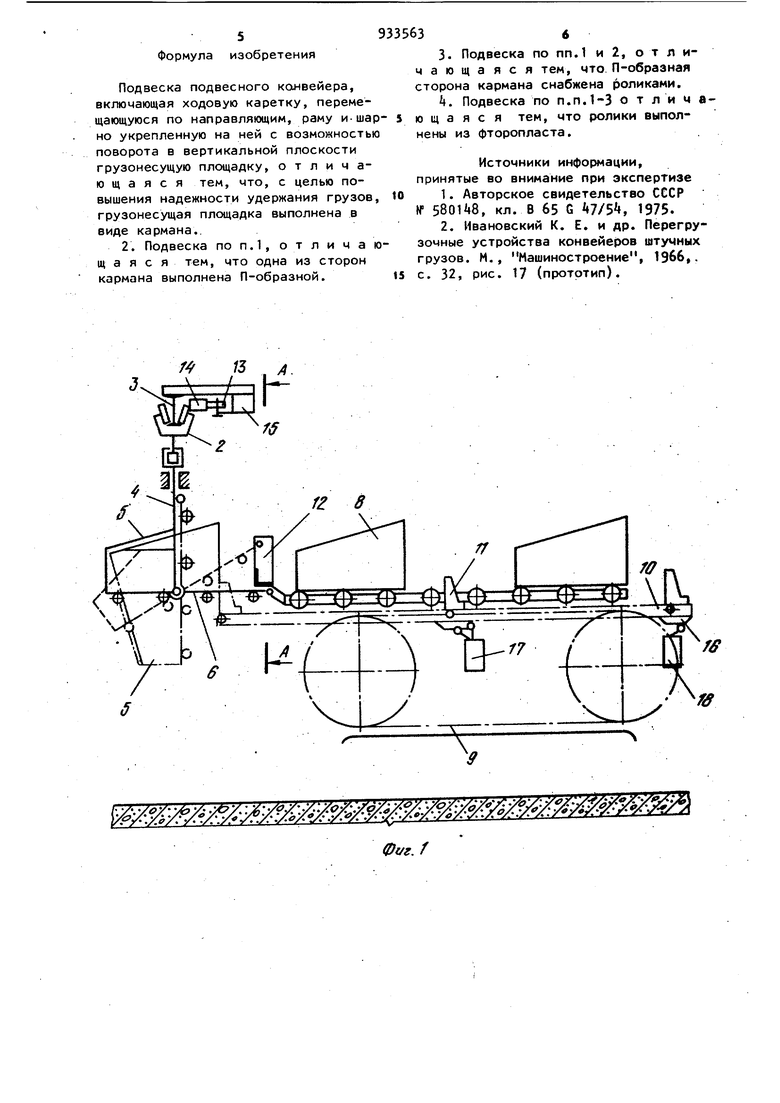
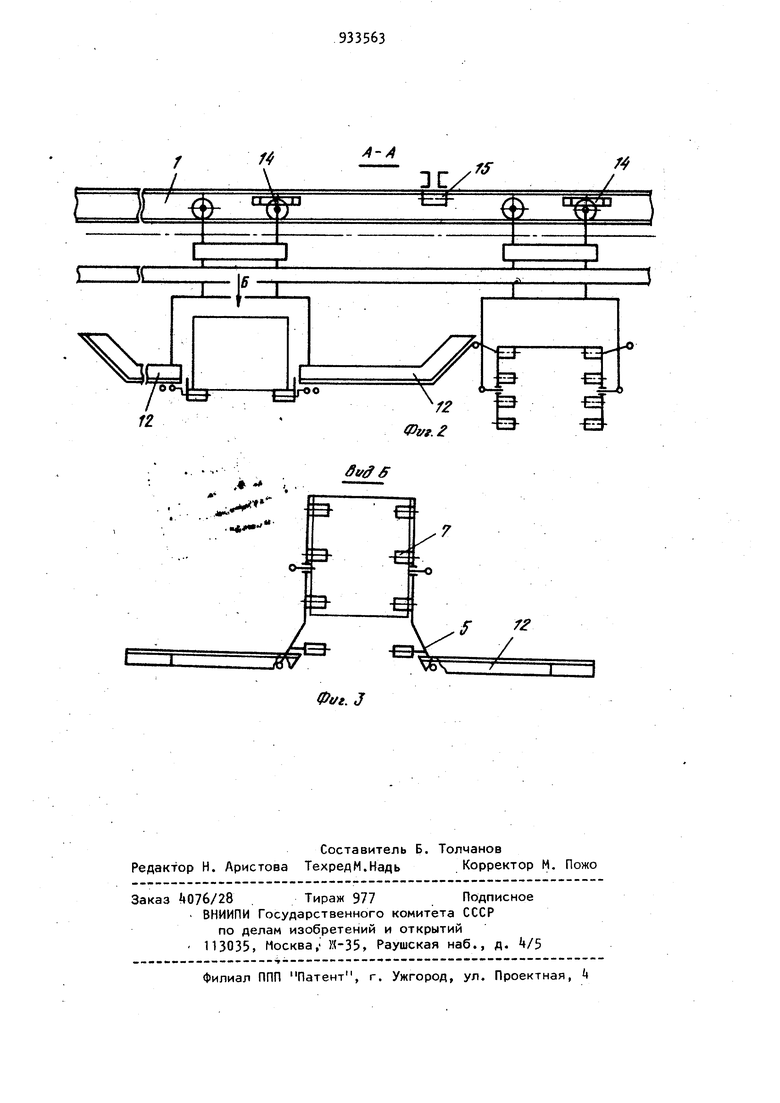
На фиг. 1 схематично изображена описываемая подвеска, обилий вид; на фиг. 2 - сечение А-А фиг. 1; на фиг. 3 - вид Б на фиг.2.
Подвеска подвесного конвейера 1 включает ходовую каретку 2, перемещающуюся по .направляющим 3 раму и шарнирно укрепленную на ней с возможностью поворота в вертикальной плоскости грузонесущую площадку 5, выполненную в виде кармана. Одна из сторон кармана (нижняя) 6 имеет П-об разную форму и роликами 7, установленными на осях и выполненными из фторопласта для,снижения трения при взаимодействии с ними изделий 8. Изделия 8 подаются на грузонесущую площадку 5 каретки 2 подающим к вейером 9 I, например, штанговым), ра мещенным под углом к приемному подвесному конвейеру 1. Транспортирующим органом конвейера 9 является штанга 10 с толкателями 11, ведущими изделия 8. На раме конвейера 9 размещены не подвижные упоры 12 с заходными наклонными плоскостями. На подвесном к вейере 1 закреплен ролик 13, а на каретке 2 - взаимодействующий с роликом 13 упор I. Ролик 13 дает команду через конечный выключатель 15 на включение привода конвейера 9 Н штанге 10 конвейера 9 укреплен кулачок 16. В систему управления устройством входят конечные выключатели 17 и 18 Работа по загрузке подвески осуществляется следующим образом. В транспортном положении без гру за нижняя сторона кармана 6 подвеск 5 под действием собственного веса занимает наклонное положение. Подвеска, двигаясь по направляющим кон вейера, упором ik, закрепленным на ходовой каретке, нажимает на ролик конечного выключателя 15, который п дает команду на включение привода штангового конвейера. Штанга 10 начинает перемещаться и ее толкатель перемещает изделие из исходного положения на подвеску. В этот момент нижняя сторона 6, взаимодействуя с неподвижными упорами 12,i постепенно занимает горизонтальное положение, в момент выталкивания изделие перемещается в заходную часть, ориентирующую изделие и заставляющую скаты ваТься по роликам. Штанга 10 входит в прорезь подве ки и заталкивает изделие до упора в карман. При этом кулачок 16 штанги нажимает на ролик конечного выключателя 17, который подает команду н реверсирование двигателя, после чег штанга перемещается в обратном направлении, совершая холостой ход, возвращаясь в исходное положение. В конце ее хода срабатывает конечный выключатель 18, отключающий привод конвейера 9. Толкатели 11 закреплены на штанге 10 шарнирно с целью обеспечения возможности их свободного прохода при холостом ходе путем утапливания в момент прохождения штанги под изделием. Возврат толкателя в исходное рабочее положение происходит под действием его собственного веса до упора хвостовой частью в штангу. Захват толкателем нового изделия производится при подаче команды на включение привода штангового конвейера конечным выключателем 15. В момент взаимодействия сферического наконечника, которым оканчивается нижняя сторона кармана 6, с He-v подвижным упором 12 нижняя часть подвески, выполненная в виде кармана, занимает то положение, которое ей придает упор. При перемещении наконечника по горизонтальному участку упора 12 нижняя сторона кармана 6 занимает горизонтальное положение, в котором производится загрузка изделия. При последующем перемещении по наклонному участку упора нижняя сторона кармана 6 последовательно переходит в наклонное положение. Далее, KOI- да наконечник второй части подвески ( по ходу перемещения ) выходит из взаимодействия с упором 12, нижняя сторона кармана под действием момента от силы тяжести загруженного изделия поворачивается до упора заходной частью в раму t подвески. При этом лицевая П-образная сторона карман 6 нижней стороны, снабженная роликами, занимает вертикальное положение, параллельное плоскости движения. В связи с тем, что нижняя сторона кармана, шарнирно закрепленная на раме с возможностью поворота в вертикальной плоскости и взаимодейctвyющaя с неподвижными линейными упорами, выполнена в виде кармана, описываемая подвеска позволяет производить перемещение изделия без дополнительной фиксации нижней ее части и обеспечивает точную ориентировку изделия на подвеске и возможность доступа к его определенным поверхностям. Формула изобретения Подвеска подвесного канвейера, вкгночающая ходовую каретку, перемещающуюся по направляющим, раму и-ша но укрепленную на ней с возможность поворота в вертикальной плоскости грузонесущую площадку, отличающаяся тем, что, с целью повышения надежности удержания грузов грузонесущая площадка выполнена в виде кармана.. 2. Подвеска по п.1, отлича щаяся тем, что одна из сторон кармана выполнена П-образной. 634 3. Подвеска по пп.1 и 2, о т п ичающаяся тем, что П-образная сторона кармана снабжена роликами. j. Подвеска по п. п. 1-3 о т ли ч аю щ а я с я тем, что ролики выполнены из фторопласта. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 580U8, кл. В 65 G Ау/З, 1975. 2. Ивановский К. Е. и др. Перегрузочные устройства конвейеров штучных грузов. М., Машиностроение, 1966,. с. 32, рис. 17 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвеска подвесного грузонесущего конвейера | 1985 |
|
SU1279920A1 |
| Подвесной грузонесцщий конвейер | 1976 |
|
SU659467A1 |
| Подвесной грузонесущий конвейер | 1985 |
|
SU1293083A1 |
| Подвеска грузонесущего конвейера | 1982 |
|
SU1022886A1 |
| Подвесной конвейер | 1959 |
|
SU122067A1 |
| Подвеска грузонесущего конвейера | 1978 |
|
SU839891A1 |
| Устройство для контроля положения транспортируемого груза | 1976 |
|
SU701888A1 |
| Устройство для упаковки пакета изделий | 1980 |
|
SU943108A1 |
| Грузонесущая подвеска | 1989 |
|
SU1661090A1 |
| Подвесной грузонесущий конвейер | 1987 |
|
SU1433875A1 |
Фуг.Г ,
Э
ЕЭ, -
.
t/e.J
Svd ff
