Изобретение относится к станкостроению. Известно устройство для съема обра ботанных деталей на токарных автоматех, содерокатэе установленную на суппорте и соединенную с штоком независимой подачи инструментальную стойку, расположенный внутри нее шпиндель с цантх й, взаимодействующий с цангой выталкиватель, и муфту, выполненную в ви де стакана, и упруго соединенную с ни гильзу, установленную на шпинделе, име ющем продольные пазы, в которых. piaa мешены крючки, шариирно закрепленные в стакане С11 Недостатком известного устройства являются невозможность закрепления деталей многогранного сечения из-аа отсутствия начального ориентирования цанг и малая надежность. Целью изобретения явлется расширение технологических возможностей устройства. Поставленная цель достигается тем,. что устройство для съема и обработки деталей со стороны отрезки на токарных автоматах, содержащее установленную на продольном суппорте и соединенную с приводом независимой подачи инструментальную стойку, расположенные внутри нее выталкиватель и шпиндель с зажимными элементами, выполненными в виде эксцентриковых кулачков, закрепленных на корпусе, снабжено установ- ленньгм на корпусе ползуном с подпружиненными фиксаторами, размещенными в выполненных в корпусе отверстиях с .возможностью взаимодействия с кулачками, и втулкой,, установленной на вь1талкивателе с возможностью поворота к взаимодействия с ползуном. На фиг. 1 изображено устройство, установленное на автомате, общий вид; на фиг. 2 - то же, поперечный разрез; на фиг. 3 - вид А на фиг. 2 (разрез); на фиг. 4 - исходное положение устройства (кулачки разведены); на фиг. 5 , рабочее положение устройства (деталь зажата кулачками).На продольном суппорте 1 установлена инструментальная стойка 2 . с возможностью возвратно-поступательно го перемещения по направляющим продол ного суппорта от привода 3 независимой подачи автомата. В стсАке 2 подвижно установлен ШПИ дель 4,. кинема связанный с веду щим валом автомата посредством шестереи 5 и 6. Эта связь обеспечивает шпинделю 4 вращение, сищсронное с вра шением шпинделя 7 автомата и направленное в ту же сторону. В шпинделе 4 закреплен корпус 8, на котором на неподвижных осях 9 установлены эксцентриковые кулачки независимого действия, выполненнью в виде двуплечих рычагов, при этом одно плечо 1О рычага предназначено для взаимодействия (зажима) с обрабатываемой заготовкой, а другое плечо 11 рычага - для фиксации эксцентрвковых кулачков в исходном положении (кулачки находятся в разведенном положении). Для быстрого перевода эксцентрико вых кулачков в рабочее положение они подпружинены пружиной 12, фиксируемой от проворота жестким упором 13. На корпус 8 свободно посажен ползун 14, выполненный в виде втулки с буртом 15, взаимодействующим с вилкой 16, которая посредством тяги 17 и буфера 18 связана с упорами 19 и 20, закрепленными на станине 2:1 автомата. В корпусе 8 свободно установлены фиксаторы 22, поджатые пружиной 23, при этом конць фиксаторов 22 закреплены в ползуне 14. Внутри корпуса 8, имеющего два npo iдольных паза 24, установлена поворачивающаяся втулка 25 с неислонными пазами 26, предохраняемая от выпадания планками 27. В поворачивающейся втулке 25 свободно установлен выталкиватель 28, перемешаюшийся по ловителю 29, жестко закрепленному в поворачивающейся втулке 25 с помощью штифта ЗО, В торце поворачивающейся втулки 25 установлены упоры 31, взаимодействующие С плечом 1О эксцентриковых кулачков. В ползуне 14 закреплен палец 32, свободно скользящий по продольным пазам 24 корпуса 8 и наклонным пазам 26 поворачивакшейся втулки 25. Одновременно палец 32 воздействует на выталкиватель 28. В шпинделе автомата зажимается многогранный пруток с обработанной, но еше не отрезанной деталью 33. Устройство-работает следующим образом. В исходном положении эксцентриковые кулачки разведены и удерживаются от проворота за плечо 11 фиксаторами 22, выступакмаими из корпуса 8, при этом пружины 12 сжаты. От привода 3 незавимисой подачи инструментальная стойка 2, а следовательно, и все устройство, получает посту петельное перемещение по направляющим продольного.суппорта 1 в сторону обрабатьтаемой детали 33, при этом ползун 14 посредством бурта 15 двигает вилку 16, тягу 17 и буфер 18 до соприкосновения с упором 19, в результате чегб прлэун 14 прекращает движение, в то.время корпус 8 продолжает перемещение, что приводит к установлению фиксаторов 22 и сжатию пружин 23. Плечи 11 эксцентриковых кулачков освобождаются от фиксаторов 22, кулачки поворач1|ваются вокруг осей 9 и захватывают деталь 33 плечами 10 при этом плеч 11 перекрьюают подпружиненные фиксаторы 22, одновременно ловитель 29 вводится во внутреннее отверстие детали 33 Происходит остановка устройства и от резка детали 33. После отрезки захваченная деталь 33 может быть отведена на некоторое расстояние и при выходе на линию центров требуемого инструмента подвергается дальнейшей обработке по торцу со стороны отрезки, причем усилие зажима увеличивается с увеличением сил резания. После окончания обработки детали 33 инструментальная стойка 2 от привода 3 10 92 независимой подачи приводится в овижение в обратном направления, увлекая с собой и устройство с обработанной деталью 33. Ползун 14 перемешает вилку 16 с тягой 17 и буфером 18 до упора 2О, Ползун 14 останавливается, а корпус 8 продолжает движение, при этом палец 32 скользит по продольному пазу 24 и взаимодействует с наклонным паэом 26. поворачивакшейся втулки 25, происходит поворот втулки 25, которая упорами 31 поворачивает эксцентриковые кулачки за плечо 10 в исходное положение, разжимая деталь 33. При проведении эксцент,{Я1ковых кулачков в исходное положение освобождаются фиксаторы 22, котОрые выходят из ко|. пуса 8 под действием сжатых пружин 23 и фиксируют эксцентриковые кулачки аа плечо 11. Одновременно палеи 32 возидействует на выталкиватель 28, который снимает деталь 33 с ловителя 29. Таким образом, обеспечивается уцаление обработанной детали 33 из устройства и подготовка его к следукяоему циклу. Предлагаемое устройство обеспечивает надежное крепление деталей MH x rpaii ного сечения.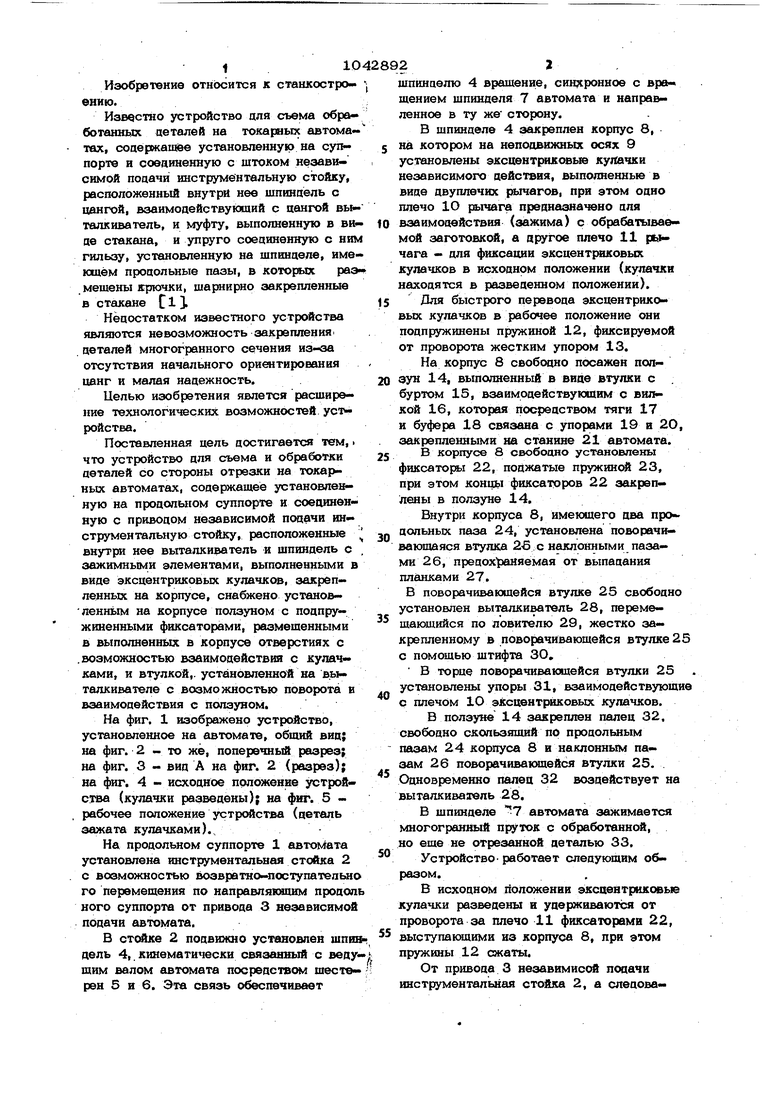

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для маркирования изделий | 1984 |
|
SU1192878A1 |
| Устройство для съема обработанныхдЕТАлЕй HA ТОКАРНыХ ABTOMATAX | 1979 |
|
SU837562A1 |
| Устройство для съема и обработки заготовок со стороны отрезки на токарных автоматах | 1985 |
|
SU1284707A1 |
| УСТРОЙСТВО для ЗАКРЕПЛЕНИЯ ДЕТАЛЕЙ СО СТОРОНЫ ОТРЕЗКИ НА ТОКАРНЫХ АВТОМАТАХ | 1973 |
|
SU406650A1 |
| Токарно-револьверный автомат | 1974 |
|
SU663487A1 |
| Роторный автомат | 1989 |
|
SU1691065A1 |
| Устройство для поддержки втулок с эксцентричным отверстием при отрезке | 1989 |
|
SU1703264A1 |
| Универсально-гибочный автомат для изготовления деталей малых серий | 1988 |
|
SU1637891A1 |
| Многопозиционный автомат для обработки изделий типа корпуса наручных часов | 1957 |
|
SU117374A1 |
| Способ обработки штучных деталей, имеющих полость, на токарно-револьверном автомате | 2018 |
|
RU2685000C1 |

УСТРОЙСТВО для СЪЕМА И ОБРАБОТКИ ДЕТАЛЕЙ СО СТОРОНЫ ОТРЕЗКИ НА ТОКАРНЫХ АВТОМАТАХ соаержашее установленную на продольном суппорте и соеаиненную с привоцом независимой поцачи инструментальную стойку, расположенные внут{ж нее выталкиватель и шпинаель с эгжимными элементами, выполненными в виде эксцентриковых кулачков, закрепленных на корпусе, отличающееся тем, что, с целью расширения технологических возможноотей, устройство снабжено установленным на корпусе ползуном с подпружиненными фиксаторами, размещенными в выполненных в корпусе отверстиях с возможностью взаимодействия с кулачками, и втулкой, установленной на выталкивателе с возможностью поворота и взаимодействия с ползуном.
ВидЛ
гв
4V.
31
--&:
Фиг.З
11
гг
ФмМ
Фиг.5
fO
/;
/J
12
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для съема обработанныхдЕТАлЕй HA ТОКАРНыХ ABTOMATAX | 1979 |
|
SU837562A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| I | |||
