2.Пневморазгрузчик по п. 1, отличающийся тем, что пульт управления содержит информационное табло с шинами дальности и азимута, на визуальном пересечении которых расположены .сигнальные лампочки, каждая из которых связана с соответствующими шинами дальности и азимута, подключенными к датчикам дальности и азимута, индикатор угла относительного поворота пневморазгрузчика и связанное с ним устройство вычисления разности угла поворота пневморазгрузчика и угла азимута от датчиков угла поворота и азимута.
3.Пневморазгрузчик по п. I, отличаю щийся тем, что дaтчик дальности, угла поворота и азимута выполнены в виде контактных колец, причем каждая ламель двух последних связана с соответствующей шиной информационного табло, а устройство вычисления разности угла поворота и угла азимута в:ы/1олнено в виде контактного кольца и подвижной контактной группы, причем ламели контактного кольца датчика
угла поворота связаны с соответствуюШимн контактами подвижной контактной группы, находящейся в механической связи сосколь ,(зящим контактом датчика азимута.
4.Пневморазгрузчик по п. , отличаю щийся тем, что он снабжен контактными дат чиками касания с разгружаемым материалом, индикаторы которых выведены на пульт управления.
5.Пневморазгрузчик по п. I, отличающийся тем, что пульт управления смонтирован на поворотном основании, связанном следящим приводом с устройством вычисления разности угла поворота и угла азимута.
6. ПневморазгруАчик по п. 1, отличающийся тем, что базовый узел выполнен с направляющей, на которой смонтирована каретка, и снабх ен упорами, на которых установлены концеые выключатели, блокирующие включение пульта управления.
7. Пневморазгрузчик по п. 1, отличающийся тем, что базовый узел закреплен на стене вагона .фиксатором.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самоходный пневмомеханический перегрузчик цемента | 1960 |
|
SU138524A1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ С ЗАКРЫТЫХ ПОЗИЦИЙ ПО НЕНАБЛЮДАЕМОЙ ЦЕЛИ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2444693C2 |
| СПОСОБ КОНТРОЛИРУЕМОГО ОРИЕНТИРОВАНИЯ НА МЕСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2310881C1 |
| Пневморазгрузчик сыпучих материалов | 1974 |
|
SU536102A1 |
| СПОСОБ СТРЕЛЬБЫ ИЗ БМД-4М В РЕЖИМЕ ВНЕШНЕГО ЦЕЛЕУКАЗАНИЯ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2715940C1 |
| УСТРОЙСТВО ДЛЯ ПЛАНИРОВАНИЯ СЫПУЧЕГО ГРУЗА | 1994 |
|
RU2125535C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ПОДЪЕМНОГО УСТРОЙСТВА И ПОДЪЕМНАЯ СИСТЕМА | 2007 |
|
RU2429185C2 |
| Устройство для дистанционного управления напольным механизмом автоматического расцепления железнодорожного подвижного состава | 1980 |
|
SU878632A1 |
| СИСТЕМА ПОРТАТИВНЫХ КОМПЛЕКТОВ ДЛЯ АВТОМАТИЗИРОВАННОГО ЦЕЛЕУКАЗАНИЯ НА ПОЛЕ БОЯ | 2019 |
|
RU2717138C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО | 2005 |
|
RU2304792C1 |
1. ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ ПНЕВМОРАЗГРУЗЧИК СЫПУЧИХ МАТЕРИАЛОВ, содержащий связанное с базовым узлом самоходное шасси, на. котором смонтировано заборное устройство с разрыхлителями и аэрокамерой, транспортный трубопровод и пульт управления, отличающийся тем, что, с целью повышения эффектнвностн и улучшения условий труда оператора, шасси связано с базовым узлом посредством тягового троса, при этом базовый узел снабжен механизмом намотки троса и датчиками измерения дальности, угла поворота и азимута разгрузчика, подключенными к пульту управления. fS (Л ЧМ| ел ю
1
Изобретение относится к машиностроению, в частности к машинам для разгрузки сыпучих материалов, например, из крытых железнодорожных вагонов.
Известен дистанционно управляемый Пневморазгрузчик сыпучих материалов, содержащий связанное с узлом са-, моходчое шасси, на котором смонтироваью заборное устрейство с разрыхлителями и аэрокамерой, транспортный трубопроводе и пульт управления 1. 10
Недостатком пневморазгрузчика является то, что для осуществления визуального i контроля за работой этой машины рабочий вынужден находиться в непосредственной бл.изости от нее. Работа пневморазгрузчика сопровождается значительным запыле- . / кием окружающего пространства, если же работы производятся в открытом помещении, то рабочий подвергается климатическим воздействиям. Кроме того, оператор испытывает физические нагрузки, при пере- j носке устройства управления по вагону.
Цель изобретения - повышение эффективности и улучшение условий труда оператора.
Для достижения поставленной цели в дястационно управляежто йнёвмораз- is фузчике сыпучих материалов, содержаuieivj связанное с базовым узлом самоходное шас си, на котором смонтировано заборное уст ройство с разрыхлителями и аэрокамерой
транспортный трубопровод-и пульт управления, шасси связано с базовым узлом по.средством тягового троса, при этом базовый узел снабжен механизмом намотки троса и датчиками измерения дальности, угла поворота и азимута разгрузчика, подклю-. ченными к пульту управления.
Пульт управления содерж.ит информационное табло с шинами дальности и азимута, на визуальном пересечении которьтх расположены сигнальные лампочки, каждая из которых связана с соответствующи-ми шинами дальности и азимута, подключенными к датчикам дальности и азимута, индикатор угла относительного поворота пневморазгрузчика и связанное с ним устройство вычисления разности угла поворота пнев моразгрузчика и угла азимута от датчиков угла поворота и азимута.,
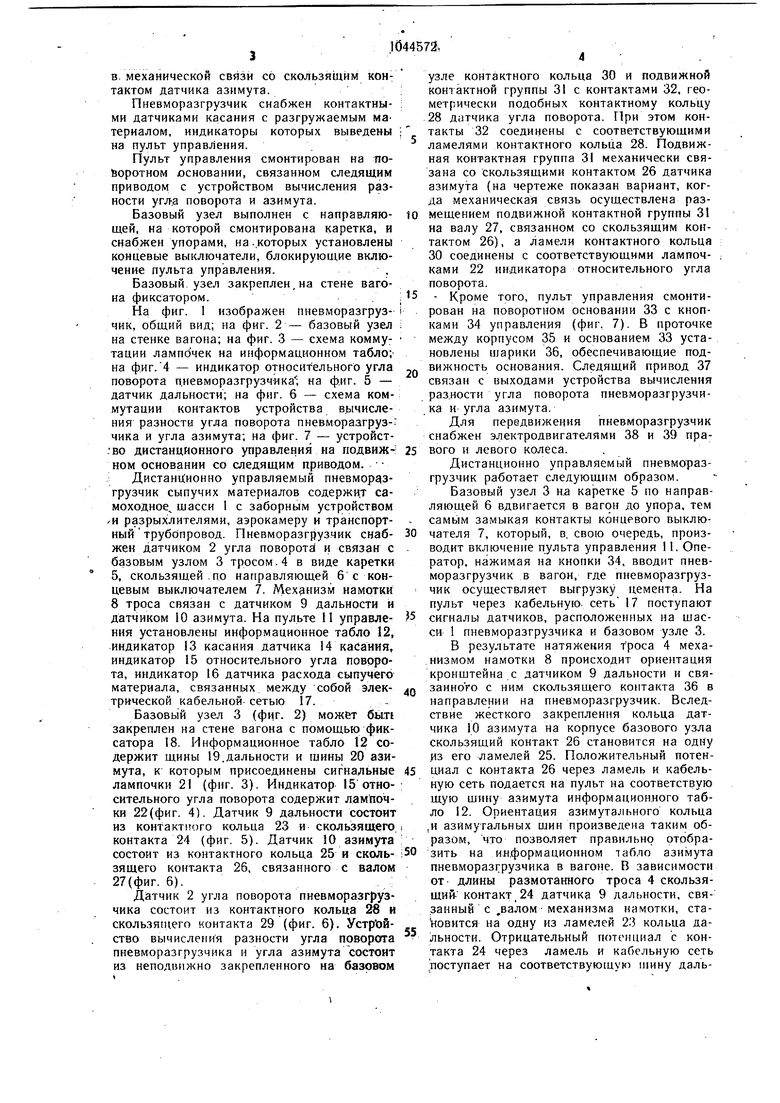
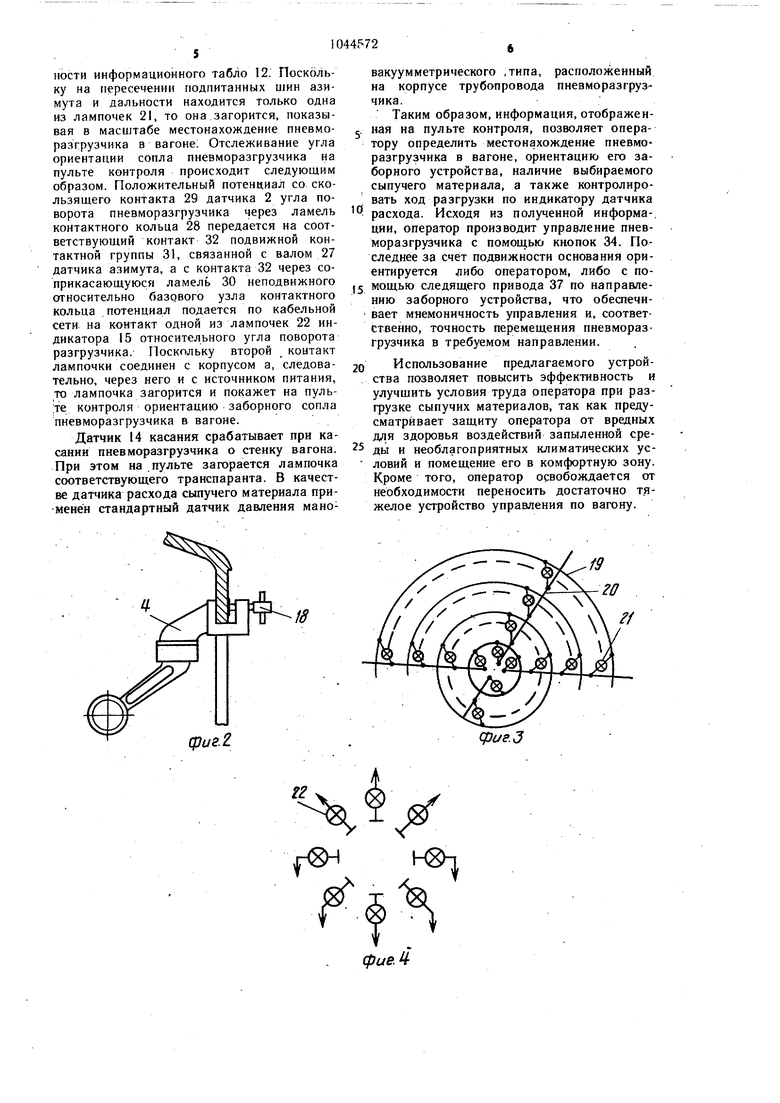
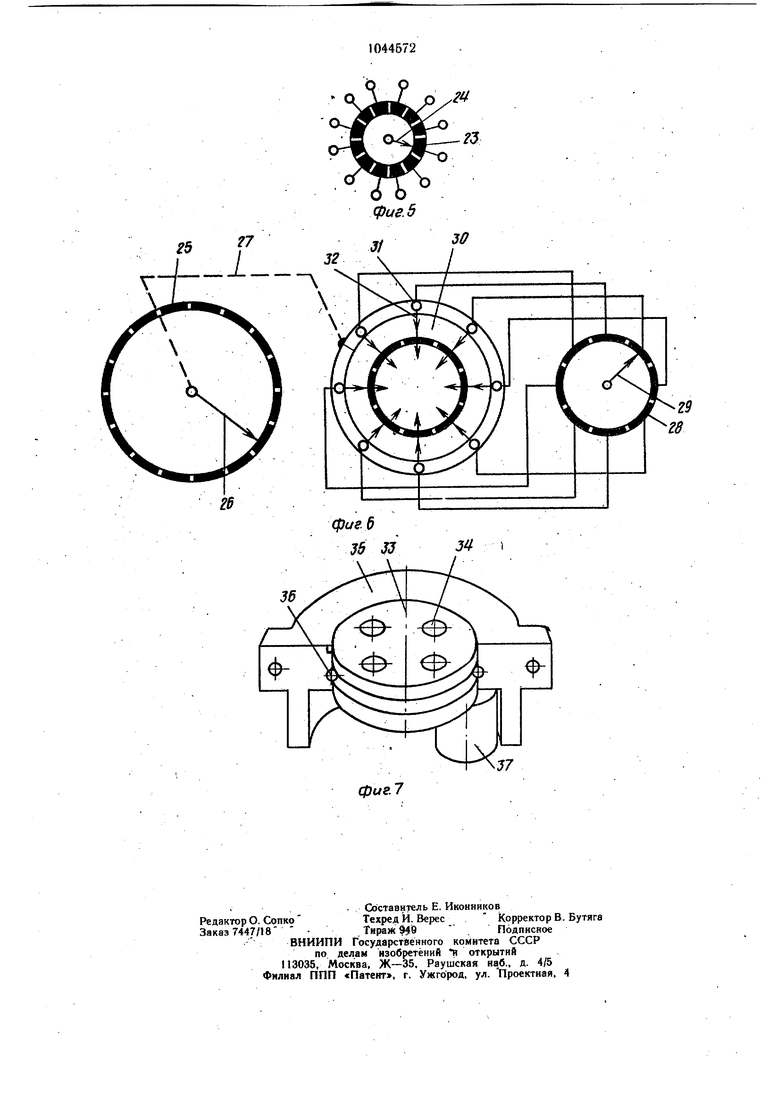
Датчики дальности угла поворота и азимута выполнены в виде контактных колец, причем каждая ламель двух последних свя;; зана с соответствующей шиной информацион кого табло, а устройство вычисления разности угла поворота if угла азимута выпол;Нено в виде контактного кольца и подвижной контактной группы, причем ламели контактного кольца датчика угла .поворота связаны с соответствующими контактами подвижной контактной группы, находящейся В. механической связи со скользящим контактом датчика азимута. Пневморазгрузчик снабжен контактными датчиками касания с разгружаемым материалом, индикаторы которых выведены на пульт управления. Пульт управления смонтирован на поЬоротном основании, связанном следящим приводом с устройством вычисления разности угл-.а поворота и азимута. Базовый узел выполнен с направляющей, на которой смонтирована каретка, и снабжен упорами, на .которых установлены концевые выключатели, блокирующие включение пульта управления., Базовый, узел закреплен,на стене вагона фиксатором.. На фиг. 1 изображен Пневморазгрузчик, общий вид; на фиг. 2 - базовый узел на стенке вагона; на фиг. 3 - схема коммутации лампочек на информационном табло;на фиг.4 - индикатор относительного угла поворота п.невморазгрузчика; на ф.иг. 5 - датчик дальности; на фиг. 6 - схема коммутации контактов устройства вычисления разности угла поворота пневморазгруз- чика и угла азимута; на фиг. 7 - устройст:во дистанционного управления на подвижном основании со следящим приводом. Дистанционно управляемый пневморэзгрузчик сыпучих материалов содержи.т самоходное, щасси 1 с заборным устройством .и разрыхлителями, аэрокамеру и транспортный трубопровод. Пневморазгрузчик снабжен датчиком 2 угла поворота и связан с базовым узлом 3 тросом. 4 в виде каретки 5, скользящей .по направляющей б с концевым выключателем 7. Механизм намотки 8 троса связан с датчиком 9 дальности и датчиком 10 азимута. На пульте И управления установлены информационное табло 12, индикатор 13 касания датчика 14 касания, индикатор 15 относительного угла поворота, индикатор 16 датчика расхода сыпучего материала, связанных между собой электрической кабельной-сетью 17. Базовый узел 3 (фиг. 2) может бы.Т1 закреплен на стене вагона с помощью фиксатора 18. Информационное табло 12 содержит щины 19.дальности и шины 20 азимута, к которым присоединены сигнальные лампочки 21 (фиг. 3). Индикатор 15 относительного угла поворота содержит лампочки 22(фиг. 4). Датчик 9 дальности состоит из контактного кольца 23 и скользящего контакта 24 (фиг. 5). Датчик 10 азимута состоит из контактного кольца 25 и скользящего конт.акта 26, связанного с валом 27(фиг. 6).: Д;атчик 2 угла поворота пневморазгрузчика состоит из контактного кольца 28 и скользящего контакта 29 (фиг. 6). Устройство вычисления разности угла поворота пневморазгрузчика и угла азимута состоит из неподвижно закрепленного на базовом узле контактного кольца 30 и подвижной контактной группы 31 с контактами 32, геометрически подобных контактному кольцу 28 д;)тчика угла поворота. При этом контакты 32 соединены с соответствующими ламелями контактного кольца 28. Подвижная контактная группа 31 механически связана со скользящими контактом 26 датчика азимута (на чертеже показан вариант, когда механическая связь осуществлена размещением подвижной контактной группы 31 на валу 27, связанном со скользящим контактом 26), а ламели контактного кольца 30 соединены с соответствующими лампочками 22 ин.дикатора относительного угла поворота. - Кроме того, пульт управления смонтирован на поворотном основании 33 с кнопками 34 управления (фиг. 7). В проточке между корпусом 35 и основанием 33 установлены шарики 36, обеспечивающие подвил ность основания. Следящий привод 37 связан с выходами устройства вычисления раз.ности угла поворота пневморазгрузчика и угла азимута. Для передвижения Пневморазгрузчик снабжен электродвигателями 38 и 39 правого и левого колеса. Дистанционно управляемый Пневморазгрузчик работает следующим образом. Базовый узел 3 н.а каретке 5 по направляющей 6 вдвигается в вагон до упора, тем самь1М замыкая контакты концевого выключателя 7, который, в. свою очередь, производит включение пульта управления 11. Оператор, нажимая на кнопки 34, вводит пневморазгрузчик в вагон, где пневморазгрузчик осуществляет выгрузку цемента. На пульт через кабельную, сеть 17 поступают сигналы датчиков, расположенных на щасси 1 пневморазгрузчика и базовом узле 3. В результате натяжения троса 4 механизмом намотки 8 происходит ориентация кронштейна с датчиком 9 дальности и связанного с ним скользящего контакта 36 в направлении на Пневморазгрузчик. Вследствие жесткого закрепления кольца датчика 10 азимута на корпусе базового узла скользящий контакт 26 становится на одну из его ламелей 25. Положительный потенциал с контакта 26 через ламель и кабельную сеть подается на пульт на соответствую щую щину азимута информационного табло 12. Ориентация азимутального кольца ,и азимутальных щин произведена таким образом, что позволяет правильно отобразить на ин.формационном табло азимута пневморазгрузчика в вагоне. В зависимости от длины размотанного троса 4 скользящий-контакт 24 датчика 9 дальности, связанный с ,валом - механизма намотки, сТаЫвится на одну из ламелей 23 кольца дальности. Отрицательный потенциал с контакта 24 через ламель и кабельную сеть поступает на соответствующую тину дальности информационного табло 12. Поскольку на пересечении подпитанных шин азимута и дальности находится только одна из лампочек 21, то она .загорится, показывая в масштабе местонахождение пневморазгрузчика в вагоне; Отслеживание угла ориентации сопла пневморазгрузчика на пульте контроля происходит следующим образом. Положительный потенциал со скользящего контакта 29 датчика 2 угла поворота пневморазгрузчика через ламель контактного кольца 28 передается на соответствующий контакт 32 подвижной контактной группы 31, связанной с валом 27 датчика азимута, а с контакта 32 через соприкасающуюся ламель 30 неподвижного относительно базового узла контактного кольца потенциал подается по кабельной сети на контакт одной из лампочек 22 индикатора 15 относительного угла поворота разгрузчика. Поскольку второй контакт лампочки соединен с корпусом а, следовательно, через него и с источником питания, то лампочка загорится и покажет на пульпе контроля ориентацию заборного сопла пневморазгрузчика в вагоне.
Датчик 14 касания срабатывает при касании пневморазгрузчика о стенку вагона. При этом на пульте загорается лампочка соответствующего транспаранта. В качестве датчика расхода сыпучего материала применён стандартный датчик давления мановакуумметрического .типа, расположенный на корпусе трубопровода пневморазгрузчика.
Таким образом, информация, отображенная на пульте контроля, позволяет оператору определить местонахождение пневморазгрузчика в вагоне, ориентацию его заборного устройства, наличие выбираемого сыпучего материала, а также контролировать ход разгрузки по индикатору датчика
расхода. Исходя из полученной информа-. дни, оператор производит управление пневморазгрузчика с помоц,ью кнопок 34. Последнее за счет подвижности основания оринтируется либо оператором, либо с помощью следящего привода 37 по направлению заборного устройства, что обеспечивает мнемоничность управления и, соответтвенно, точность перемещения пневморазгрузчика в требуемом направлении.
Использование предлагаемого устройства позволяет повысить эффективность и улучщить условия труда оператора при разгрузке сыпучих материалов, так как предусматривает защиту оператора от вредных для здоровья воздействий запыленной среды и необлагоприятных климатических условий и помещение его в комфортную зону. Кроме того, оператор освобождается от необходимости переносить достаточно тяжелое устройство управления по вагону.
f9
0
дзиг.З
фиг.7
| I | |||
| Самоходный пневмомеханический перегрузчик цемента | 1960 |
|
SU138524A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
