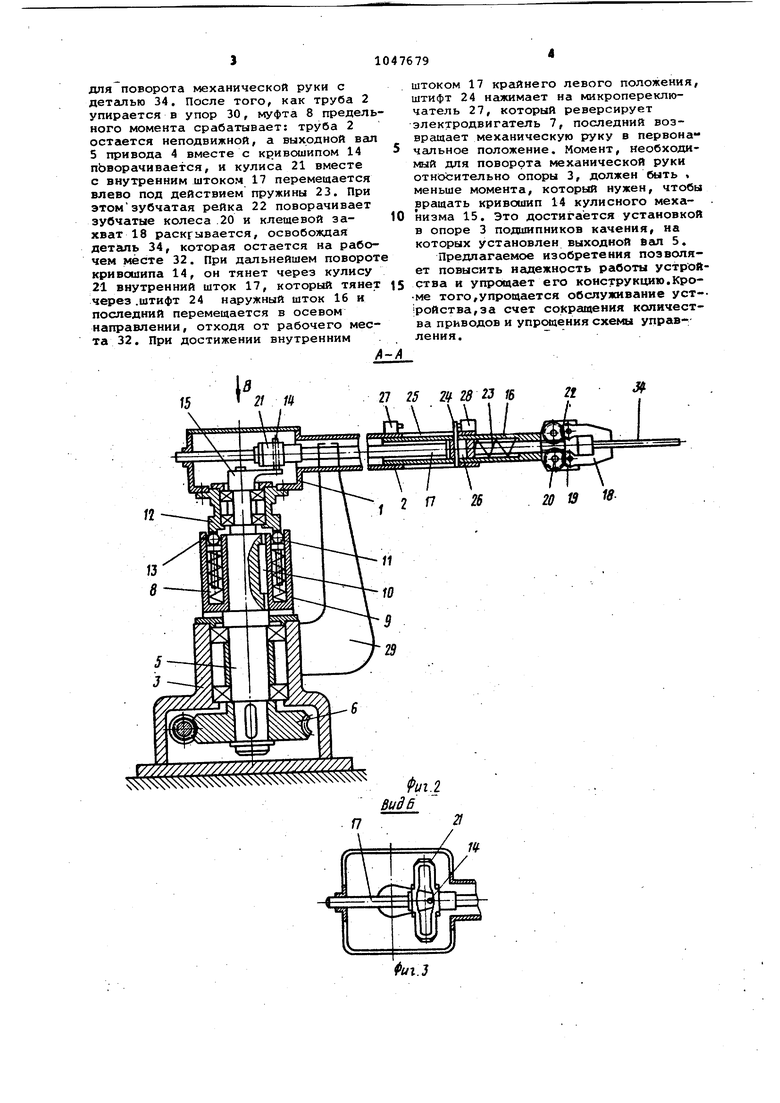
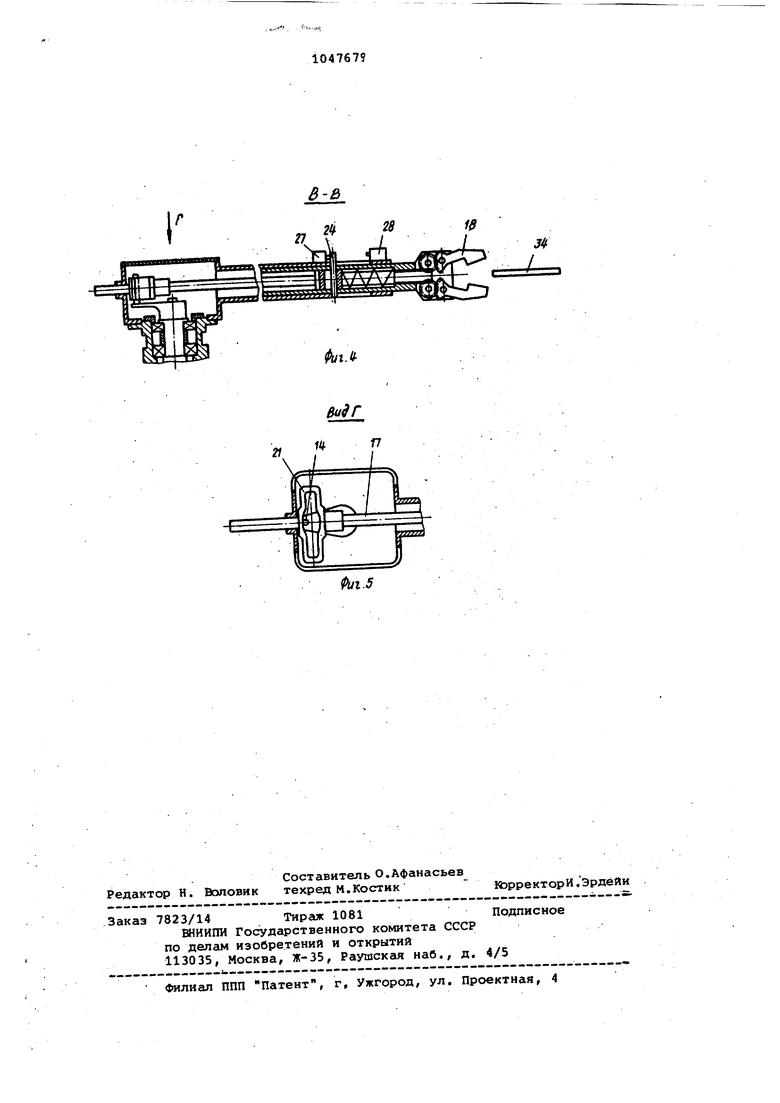
Изобретение относится к машиностроению , а именно к роботостроени Известен промышленный робот, содержащий механическую руку в виде трубы, установленной на опоре с воэ можностью поворота и осевого переме щения и снабженной схватом, а также привод поворота с микровыключателя ми 1. Недостатком известного устройств является применение отдельных приводов для каждого из трех независимых движений рабочего органа, что усложняет конструкцию. Цель изобретения - повышение надежности устройства. д Поставленная цель достигается тем, что промышленный робот, содержа щий механическую руку в иде трубы, установленной на опоре с возможность поворота и осевого, перемещения и снабженной схватом, а также привод поворота с микровыключателями, снабжен двусторонней зубчатой рейкой со штифом, двумя телескопическими штоками и кулисным механизмом, при этом на одном конце внутреннего штока установлены двусторонняя зубчатая рейка, штифт которой вза1п«1одействует с микровыключателем привода поворота на выходном валу которого установлен ,кулисный механизм, кулиса которого соединена с другим концом внутреннего штока, а кривошип соединен с выходным валом привода поворота, при этом телескопические штоки соеди нены дополнительно введенным упругим злементЬм и установлены внутри трубы а на наружном штоке установлен охват На фиг.1 изображено устройство общий вид; на фиг. 2 - разрез А-А на фиг. 1(захват в закрытом попоже.нии);на фиг. 3 - вид Б на фиг. 2; на фиг, 4 - разрез В-В на фиг. 1 захват в раскрытом положении ; на фиг. 5 - вид Г на фиг. 4. Устройство содержит поворотную головку 1 и механическую руку, выполненную в виде трубы 2, установлен ную на опоре 3 с возможностью поворо та и привод поворота 4 с выходным ва лом 5. Привод поворота 4 может быть выполнен, например, в виде червячной пары 6 и электродвигателя 7. Между выходным валом 5 привода поворота 4 и механической рукой установлена муфта 8 предельного момекта (например шiapикoвaя). Одна часть 9 муфты 8 закреплена на выходном валу 5 через шпонку 10 и снабжена подпружиненными шариками 11, а другая часть 12 муфты 8 жестко соединена с механической рукой и снабжена пазами 13, в которы входят шарики 11. На выходном валу 5 жестко закреплен кривошип 14 кулисного механизма 15. Внутри трубы 2 установлены с возможностью перемещения два телескопически соединенных между собой штока: наружный 16 и . внутренний 17. На наружном штоке 16 установлен клещевой захват 18 с зубчатыми секторами 19 и зубчатые колеса 20. Внутренний шток 17 одним концом жестко соединен с кулисой 21, в которую входит кривошип 14, а другой конец штока 17 снабжен двусторонней Зубчатой рейкой 22, входящей в зацепление, с зубчатыми колесами 20. Между внутренним штоком 17 и наружным штоком 16 установлена пружина 23 сжатия. Для предотвращения разворота клещевого захвата 18, через внутренний 17 и наружный 16 штоки и трубу 2 прсЯ1ущен штифт 24, закрепленньлй на наружном штоке 16, а на трубе 2 и внутреннем штоке 17 выполнены прорези 25 и 26. На трубе 2 установлены микропереключатели 27 и 28 привода попорота, взаимодействующие со штифтом 24 в крайних полс жениях внутреннего штока 17. На опоре 3 установлены на кронштейнах 29 два упора 30 и 31, ограничивающие угол поворота с механической руки. Угол поворота ot лежит в пределах 20-320 и может регулироваться перестановкой (или поворотом) кронштейнов 29, в зависимости от расположения рабочих мест 32 и 33, которые обслуживает устройство. Конфигурация клещевого захвата 18 может меняться в зависимости от фор|лл детали 34.Устройство работает следующим образом. При включении привода поворота 4 механическая рука поворачивается до .упора 31 (сплошная линия на фиг. 1)., ihocpe того как труба 2 упирается в упор 31, срабатывает муфта 8 предельного момента, при этом выходной вал 5 привода 4 вргицается (шарики 11 выталкиваются из пазов 13) и криво- шип 14 толкает внутренний шток 17 через кулису 21. При этом поступательное движение получают внутренний 17 и наружный 16 штоки и клещевой захват 18 в раскрытом состоянии подходит к рабочему месту 33. При дальнейшем движении наружного штока 16 штифт 24 упирается в край прорези 25, а внутренний шток 17 двигаясь, сжимая пружину 23. Это движение продолжается в пределах длины прорези 26, при этом зубчатая рейка 22 поворачивает зубчатые колеса 20 и вместе с ними зубчатые сектора 19 и клещевой захват 18 сходится,зажимая деталь 34. Все элементы занимают положение, показанное на фиг. 2. В этом положении штифт 24 нажимает на мкровыключатель 28, который сообщает электродвигателю 7 обратное вращение (реверс). При этом механическая .рука поворачивается на угол до упора 30. Муфта предельного- момента 8 передает момент,достаточный
для поворота механической руки с деталью 34. После того, как труба 2 упирается в упор 30, муфта 8 предельного момента срабатывает: труба 2 остается неподвижной, а выходной вал 5 привода 4 вместе с кривошипом 14 пЬворачивается, и кулиса 21 вместе с внутренним штоком 17 перемещается влево под действием пружины 23. При этомзубчатая рейка 22 поворачивает зубчатые колеса 20 и клещевой захват 18 раскгывается, освобождая деталь 34, которая остается на рабочем месте 32. При дальнейшем повороте кривсзшипа 14, он тянет через кулису 21 внутренний шток 17, который тянет через.штифт 24 наружный шток 16 и последний перемещается в осевом направлении, отходя от рабочего места 32. При достижении внутренним 1 Г5 2/
:$ : f:$$$$S$$ : $$$$$$
штоком 17 крайнего левого положения, штифт 24 нажимает на микропереключатель 27, который реверсирует электродвигатель 7, последний возвращает механическую руку в первоначальное положение. Момент, необходимый для поворота механической руки относительно опоры 3, должен быть , меньше момента, который нужен, чтобы вращать кривошип 14 кулисного механизма 15. Это достигается установкой в опоре 3 подшипников качения, на которых установлен выходной вал 5.
Предлагаемое изобретения позволяет повысить надежность работы устройства и упрощает его конструкцию.Кроме того,упрощается обслуживание уст-тройства,за счет сокращения количества приводов и упрощения схемы управления.
К27
Риг.2 ВидВ
1415 2 2 2J V 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для захвата и подачи плоских изделий | 1986 |
|
SU1375548A1 |
| Устройство для загрузки транспортных средств сыпучими грузами | 1985 |
|
SU1511167A1 |
| Механизм перемещения резака устройства для термической резки труб | 1981 |
|
SU996122A1 |
| Бесшатунный двигатель с кривошипно-кулисным механизмом | 2022 |
|
RU2794018C1 |
| Схват | 1985 |
|
SU1289679A1 |
| Манипулятор | 1983 |
|
SU1186464A1 |
| Устройство для изготовления гиперболоидных контактных узлов Карташева В.В. | 1987 |
|
SU1554058A1 |
| Манипулятор | 1984 |
|
SU1194673A1 |
| Револьверный суппорт токарного автомата | 1981 |
|
SU992124A1 |
| Устройство для транспортирования заготовок | 1976 |
|
SU576232A1 |

щ n
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Промышленный робот | 1974 |
|
SU503711A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
