(54) ЗАХВАТ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1980 |
|
SU889421A1 |
| Манипулятор | 1986 |
|
SU1315228A1 |
| ЗАХВАТ | 2000 |
|
RU2175910C1 |
| Хонинговальный станок для обработки цилиндрических поверхностей | 1986 |
|
SU1563951A2 |
| Устройство для гибки обечаек из листовых заготовок | 1982 |
|
SU1061883A2 |
| Захват манипулятора | 1983 |
|
SU1134276A1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2032527C1 |
| Захват манипулятора | 1977 |
|
SU642151A1 |
| Схват манипулятора | 1983 |
|
SU1166988A1 |
| Автоматизированный технологический комплекс для обработки фасонного и сортового проката | 1987 |
|
SU1511020A1 |
1
Изобретение относится к области машиностроения, а именно к манипуляторам, предназначенным для механизации и автоматизации операций в технологических процессах.
Известен захват манипулятора, содержащий шарнирно установленные на корпусе приводные рычаги, несущие зажимные губки l .
Известный захват не обладает широкими технологическими возможностями вследствие невозможности обеспечения такого взаимного положения губок и детали, при котором между ними сохранялся бы зазор. Выполнение данного условия в известном захвате усложняет его конструкцию.
Целью настоящего изобретения является расширение технологических возможностей и упрощение конструкции.
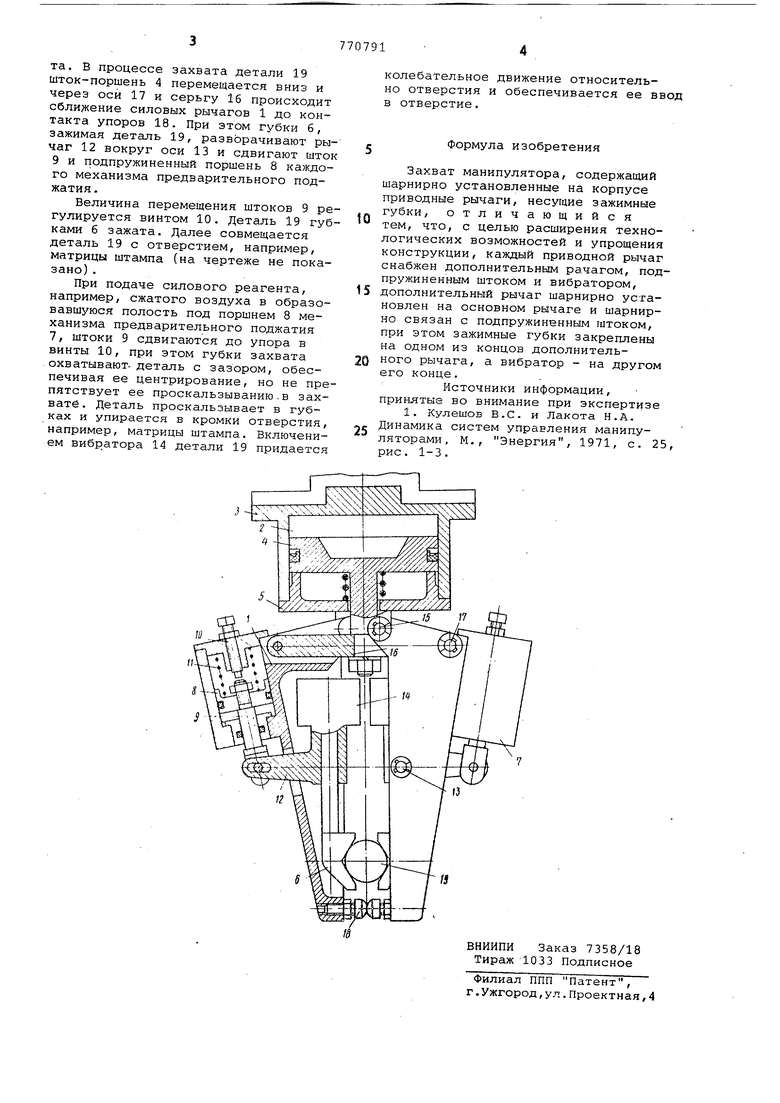
Указанная цель достигается тем, что каждый приводной рычаг снабжен дополнительным рычагом, подпружиненным штоком и вибратором, дополнительный рычаг шарнирно установлен на основном рычаге и шарнирно связан с подпружиненным штоком, при этом зажимные губки закреплены на одном
из концов дополнительного рычага а вибратор - на другом его конце. На чертеже изображен общий вид захвата манипулятора. 5 Захват содержит силовые рычаги 1, привод 2, выполненный в виде цилиндра 3 с подпружиненными штокомпоршнем 4 и крышкой 5, губки б и установленные на силовых рычагах
10 механизмы предварительного поджатия 7, состоящие из подпружиненного поршня 8, штока 9, винта 10, пружины 11 и исполнительных элементов, выполненных в виде дополнительных двухJ5 плечих рычагов 12, шарнирно связанных с силовыми рычагами 1 при помощи осей 13. На каждый дополнительный двухплечий рычаг 12 крепится губка б и вибратор 14. Силовые рычаги 1
20 крепятся к крышке 5 при помощи осей 15 и соединяются с приводом 2 серьгой 16 и осями 17. На силовых рычагах 1 установлены регулируемые упоры 18. В губках 6 расположена деталь 19.
25 Захват манипулятора работает следующим образом.
Перемещая подпружиненный шток-поршень 4 вверх, силовые рычаги 1 через оси 15 и серьгу 16 разворачива- .
30 ются и обеспечивают раскрытие з ахва
