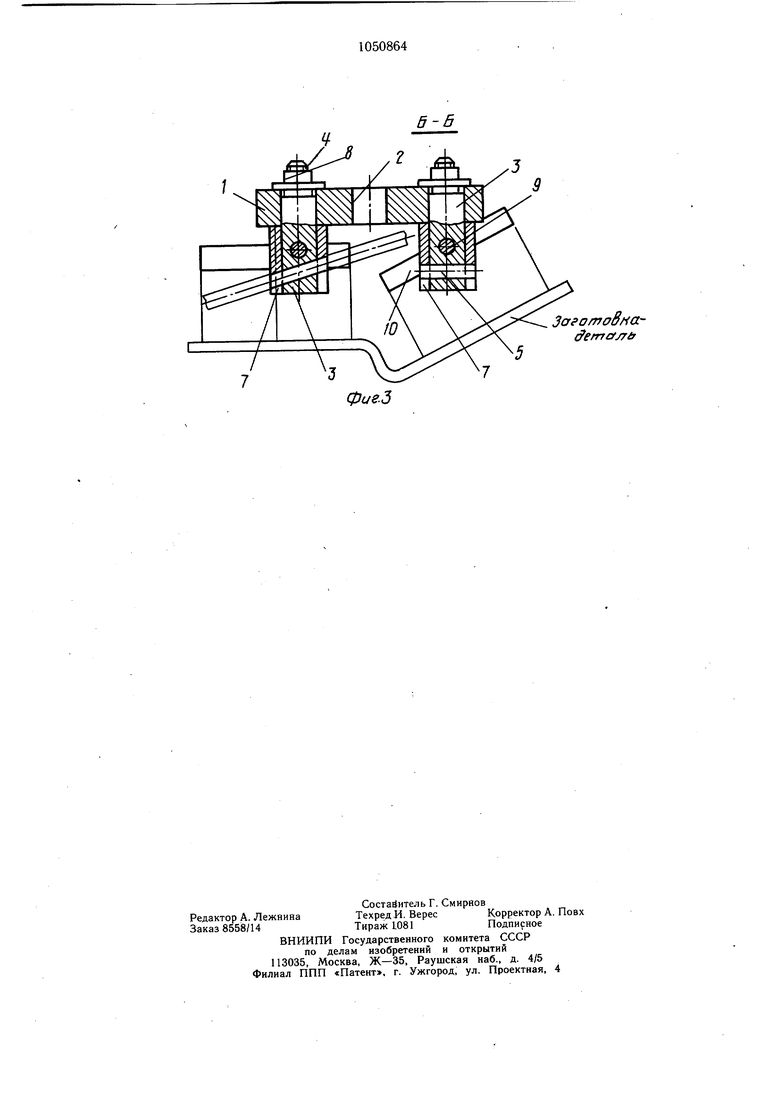
Изобретение относится к средствам механизации и автоматизации технологическИХ процессов и может быть использовано в работах, манипуляторах для захвата, удержания и перемещения заготовок на рабочую позицию, например, при обработке давлением. Наиболее близким к предлагаемому по технической сущности и достигаемому результату является электромагнитный захватный орган, содержащий корпус с размещенными в нем электромагнитом и подпружиненным толкателем, узел крепления корпуса, включающий кронштейн и державку в виде стержня, размещенного в отверстии кронштейна I. Недостатком известного электромагнитного захватного органа является то, что с его помощью мож.но захватывать только заготовки, строго ориентированные в одном положении. Цель изобретения - расширение области применения путем обеспечения захвата различно ориентированных заготовок. Для достижения поставленной цели в электромагнитном захватном органе, содержащем корпус с размещенными в нем электромагнитом и подпружиненным толкателем, узел крепления корпуса, включающий кронштейн и державку в виде стержня, размещенного в отверстии в кронштейне, на кронштейне выполнено по меньшей мере одно дополнительное отверстие, узел крепления снабжен зажимом, выполненным в виде цилиндрического пальца с поперечными отверстиями и охватывающей его втулки и установленными в дополнительном отверстии кронштейна с возможностью возвратно-поступательного перемещения и поворота относительно своей продольной оси, державка размещена в поперечном отверстии цилиндрического пальца с возможностью возвратно-поступательного перемещения и поворота относительно своей продольной оси. На фиг. 1 изображен электромагнитный захватный орган, вид в плане; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1. Электромагнитный захватный орган содержит кронштейн 1 с отверстиями 2, в коЮ
Фи.г торые вставлены зажимы, выполненные в виде цилиндрического пальца 3 с резьбовой частью 4 и отверстиями 5 и втулки 6 с пазами 7. Зажим крепится к кронштейну 1 гайкой 8. Державка 9 в виде цилиндрического стержня размещена в отверстии цилиндрического пальца 3 с возможностью возвратно-поступательного перемещения и поворота относительно своей продольной оси и закреплена на крыщке 10 корпуса 11, в котором размещены электромагнит 12 и толкатель 13, поджатый пружиной 14. Углы наклона отверстий 5 в зажимах и пазы 7 во втулках 6 зависят от конфигурации заготовки. Наличие нескольких отверстий 2 в кронштейне 1 позволяет установить несколько зажимов в зависимости от конфигурации и массы заготовки. Настройка и работа электромагнитного захватного органа осуществляются следующим образом. В отверстия 2 кронштейна 1 устанавливают цилиндрические пальцы 3, на них насаживают втулки бив отверстия 5 вставляют стержни 9 с корпусом 11 и крышкой 10. После установки цилиндрического пальца 3 он закрепляется на кронштейне 1 в нужном положении гайкой 8. При помощи кронштейна 1 захватный орган крепится к руке манипулятора или робота. В зоне загрузки рука робота с захватным органом опускается до уровня заготовки, по катушке электромагнита 12 пропускается электрический ток, происходит захват заготовки, которая затем переносится в зону обработки. Далее рука, робота опускается вместе с заготовкой, которая ориентируется при помощи фиксирующих элементов, установленных в зоне обработки (не показаны), катущка электромагнита 12 обесточивается, а подпружиненный толкатель 13, воздействуя на заготовку, отделяет ее от захватного органа. Рука робота возвращается за следующей заготовкой и цикл повторяется. Предлагаемый электромагнитный захватный орган обладает широкой областью применения, так как обеспечивает захват различно ориентированных заготовок.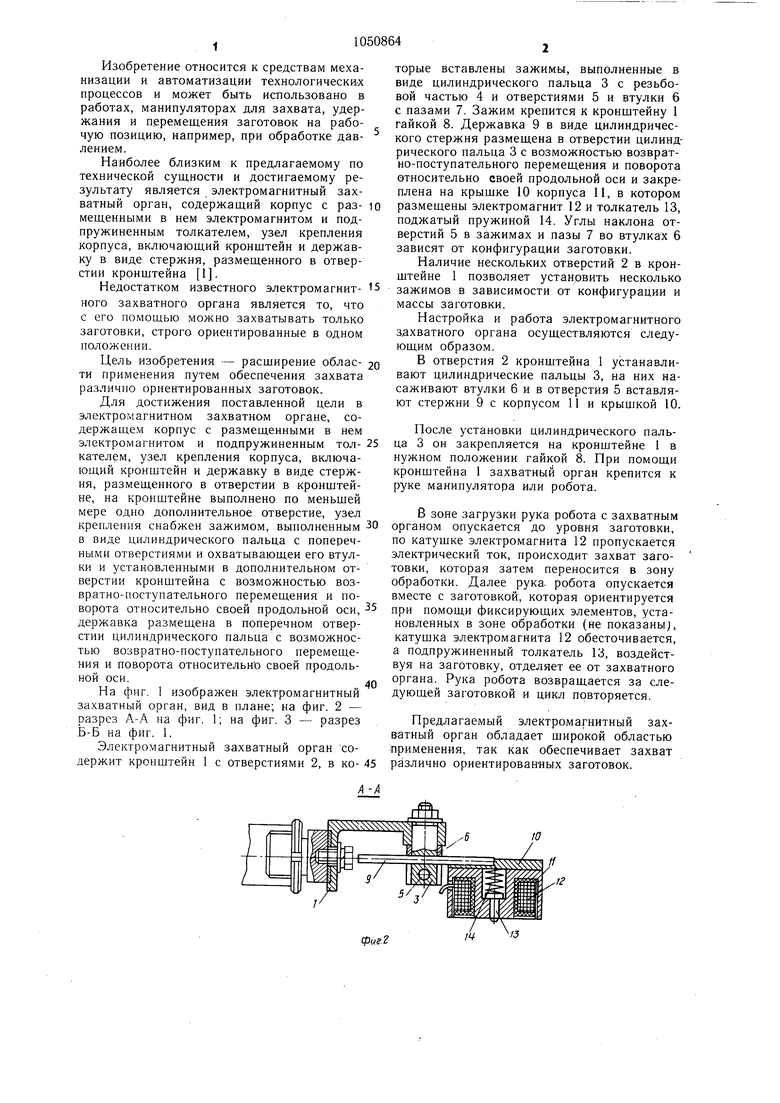
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для шаговой подачи стопы заготовок | 1984 |
|
SU1194544A1 |
| Захватный орган устройства для подачи заготовок в рабочую зону | 1978 |
|
SU740359A1 |
| Робот к листоштамповочному прессу | 1988 |
|
SU1542672A1 |
| Устройство для захвата уложенных в стопу текстильных заготовок | 1990 |
|
SU1733361A1 |
| Электромагнитный схват | 1986 |
|
SU1341024A1 |
| Захват промышленного робота | 1987 |
|
SU1509247A1 |
| Захватное устройство | 1988 |
|
SU1632585A1 |
| МЕХАНИЗМ ПЕРЕНОСА МНОГОПОЗИЦИОННЫХ ХОЛОДНОВЫСАДОЧНЫХ АВТОМАТОВ | 1973 |
|
SU366912A1 |
| Промышленный робот | 1984 |
|
SU1301528A1 |
| Устройство для отделения плоской заготовки от стопы и подачи ее к обрабатывающей машине | 1983 |
|
SU1098623A1 |
ЭЛЕКТРОМАГНИТНЫЙ ЗАХВАТНЫЙ ОРГАН, содержащий корпус с размещенными в.нем электромагнитом и подпружиненным толкателем, узел крепления корпуса, включающий кронщтейн и державку в виде стержня, размещенного в отверстии в кронщтейне, отличающийся тем, что, с целью расщирения области применения путем обеспечения захвата различно ориентированных заготовок, на кронщтейне выполнено по меньщей мере одно дополнительное отверстие, узел крепления снабжен зажимом, выполненным в виде цилиндрического пальца с поперечными отверстиями и охватывающей его втулки и установленным в дополнительном отверстии кронщтейна с возможностью возвратно-поступательного перемещения и поворота относительно своей продольной оси, державка размещена в поперечном отверстии цилиндрического пальца с возможностью возвратнопоступательного перемещения и поворота относительно своей продольной оси. (Л 01 о 00 05 4
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Подвеска для деталей,окрашиваемых способом электроосаждения | 1973 |
|
SU466915A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
