Изобретение относится к средствам механизации и автоматизации технологических процессов и может быть использовано в роботах, манипуляторах для захвата, удержания и перемещения заготовок на рабочую позицию.
Цель изобретения расширение технологических возможностей за счет обеспечения захвата различно ориенти рованных заготовок.
На фиго изображен схват, общий вид; ,на фиг.2 - вид А на фиг,К
Электромагнитный схват содержит электромагниты 1, установленные в корпусе 2, эластичные стержни 3, ус- тановленные с возможностью продольного перемещения и поворота вокруг своей оси в державке 4. Одни концы стержней 3 жестко связаны с корпусом 2 о По обе стороны от державки 4 на стержнях 3 установлены упоры 5, которые могут перемещаться вдоль стержня и фиксироваться винтами 6 Между упорами 5 и державкой 4 расположены упругие элементы 7. Позицией 8 обозначены штанги для крепления схвата на руке робота (не показана),
Схват работает следующим образом.
Перед перемещением схвата осуществляется его настройка, которая сводится к выбору необходимой жесткости стержней 3 путем изменения их длины от корпуса 2 до державки 4„ После выбора необходимой жесткости упоры 5 фиксируются винтами 6. В зоне загрузки рука робота со схватом опускается до уровня заготовки. Корпус 2 электромагнитов под действием при
жимной силы руки робота ориентируется по поверхности захвата заго.товки. По катушкам электромагнитов 1 пропускается электрический ток и происходит .захват заготовки. При подъеме руки робота корпус 2 электромагнитов под действием эластичных стержней 3 и упругих элементов 7 возвращается в исходное положение и заготовка в горизонтальном положении переносится в зону обработки
Формула из обретения
1.Электромагнитный схват, содержащий установленные в корпусе электромагниты и державку, кинематически связанную с корпусом, отличающийся тем, что, с целью расширения технологических возможностей эа счет обеспечения захвата различно ориентированных заготовок, кинематическая связь державки с корпусом выполнена в виде двух эластичных стержней, установленных в державке с возможностью продольного перемещения и поворота вокруг своей оси, при этом один конец каждого из этих стержней жестко связан с корпусом, а также упоров, установленных на упругих стержнях по обе стороны от державки, и упругих элементов, расположенных на стержнях между державкой и удора- ми„
2. Схват по п.1, о т л и ч а ю- щ и и с я тем, что упоры установлены на стержнях с возможностью продольного перемещения и фиксации.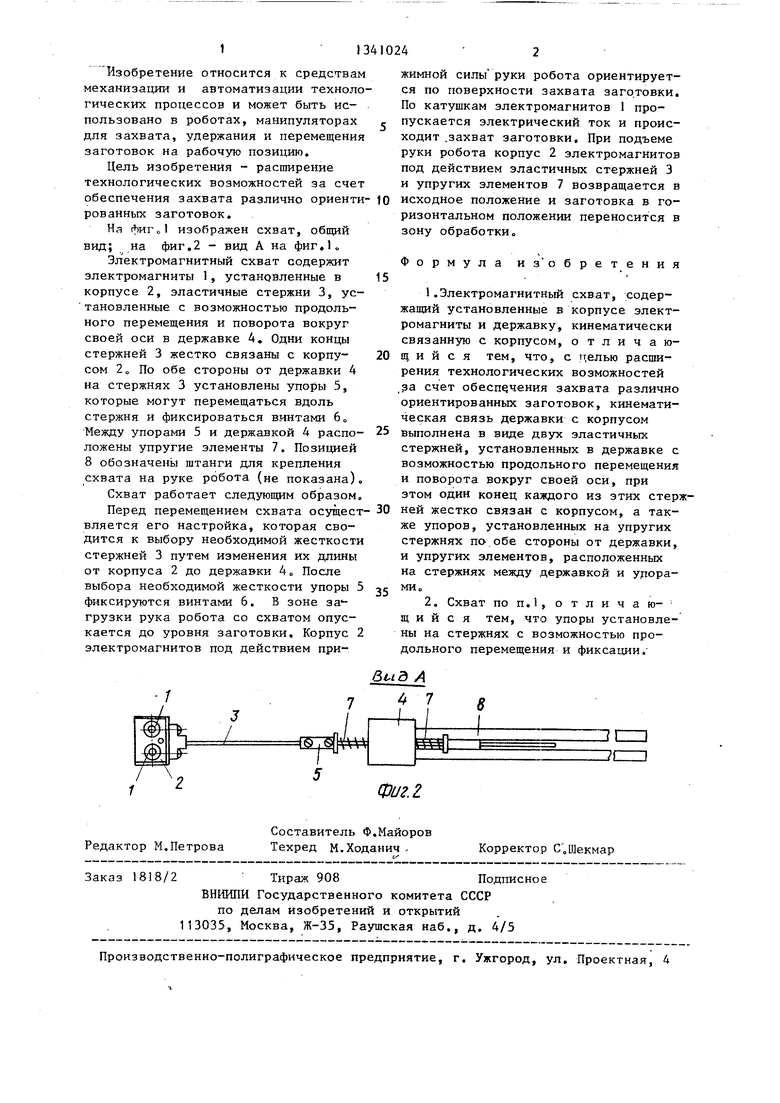
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный захватный орган | 1982 |
|
SU1050864A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
| Автоматический манипулятор | 1976 |
|
SU565819A1 |
| Автоматизированный комплекс для листовой штамповки заготовок с внутренним асимметричным контуром | 1984 |
|
SU1253699A1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Робототехнический комплекс | 1986 |
|
SU1425036A1 |
| Манипулятор | 1981 |
|
SU1229031A1 |
| Манипулятор | 1980 |
|
SU1166877A1 |
| Схват промышленного робота | 1981 |
|
SU1009758A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
Изобретение относится к средствам механизации и автоматизации, технологических процессов и может быть использовано в роботах, манипуляторах для захвата, удержания и пе- рем ещения заготовок на рабочую позицию. Целью изобретения является рас. ширение технологических возможностей за счет обеспечения захвата различно ориентированных заготовок. Настройка схвата осуществляется изменением длины эластичных стержней 3 от корпуса 2 электромагнитов до державки 4, в которой стержни 3 установлены с возможностью продольного перемещения и поворота вокруг их оси. Изменение длины производится перемещением упоров 5 с последующей их фиксацией. При работе схвата корпус 2 ориентируется по поверхности захвата заготовки под действием прижимной силы руки, после чего производится включение электромагнитов и захват заготовки. 1 з.п. ф-лы, 2 ило (Л (Риг.1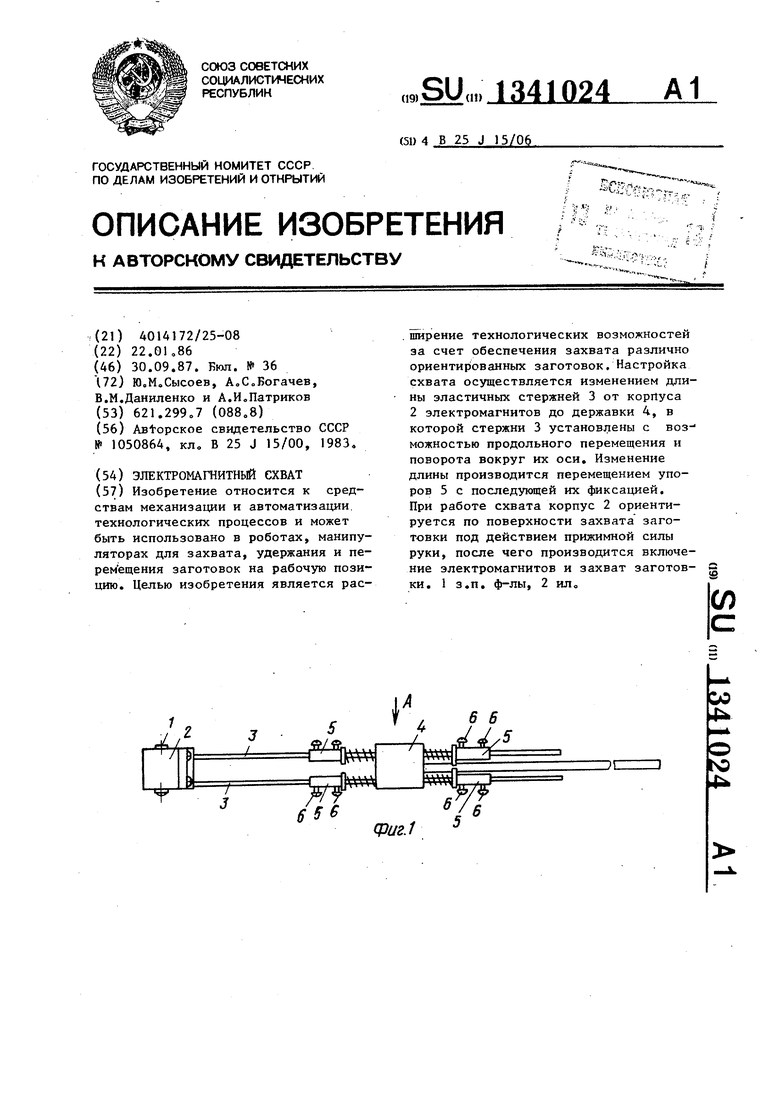
Фиг.г
Редактор М.Петрова
Составитель Ф.Майоров Техред М.Ходанич 1818/2
Тираж 908Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор С ,Шекмар
| Электромагнитный захватный орган | 1982 |
|
SU1050864A1 |
