Изобретение относится к машиностроению и может быть использовано для автоматизации загрузки сборочного и обрабатывающего оборудования. Известно устройство для отделения из стопы плоских заготовок, содержащее вакуумный захват и магазин с подвижным поддоном с рейкой, связанной с храповиком 1 Это устройство не позволяет поштучно отделять из стопы детали с криволинейной поверхностью в результате распушения стопы. Известно также устройство для отделения из стопы деталей с криволинейной поверхностью, содержащее смонтированяые по станине вакуумный захват, механизм его перемещения, щуп и подпружиненный упор 2. Недостатками этого устройства являются сложность его конструкции, обусловленная необходимостью выполнения двух рычагов с жесткими упорами и подпружиненными фиксаторами, механизма подъема поддона, а также невозможность заполнения магазина деталями после израсходования очередной стопы без ручного отвода поддона вниз и без снятия рычагов с жесткими упорами и фиксаторами. Все это усложняет конструкцию устройства, создает значительные неудобства при его эксплуатации и невозможность автоматизации процесса. Цель изобретения - повыщение надежности работы устройства. Указанная цель достигается тем что в устройстве для отделения из стопы деталей с плоской и криволинейной поверхностью, содержащем смонтированные на крон штейне вакуумный захват, механизм его перемещения, щуп и подпружиненный упор механизм перемещения вакуумного захвата включает смонтированные на кронштейне параллелограммный механизм с цилиндрическим фиксатором, ролик и пару вертикальных двуплечих рычагов, первый из которых полый, а второй размещен в его полости, при этом верхнее плечо полого рычага снабжено кулачком для взаимодействия с роликом, а подпружиненный упор закреплен на нижнем его плече, причем верхнее плечо второго рычага имеет собачку для взаимодействия с цилиндрическим фиксатором, а щуп смонтирован на нижнем его плече. Кроме того, нижние плечи рычагов снабжены выступами для взаимодействия одного с другим. На чертеже изображена кинематическая схема устройства. Устройство содержит кронштейн 1, на котором установлены вакуумный захват 2, механизм его перемещения, включающий держатель 3, ролик 4 и втулку 5, в которую вставлен полый двуплечий рычаг 6. Пружина 7 надета на полый рычаг 6 и находится между кронштейном 1 и нижним плечом 8 рычага 6. На нижнем плече 8, имеющем выступ 9, установлен упор 10 с насечкой, подпружиненный пружиной 11. Верхнее плечо рычага 6 имеет кулачок 12. Двуплечий рычаг .13, проходящий через полый рычаг 6, имеет щуп 14 с выступом 15, а на верхнем его плече 16 крепится собачка 17, подпружиненная пружиной 18. Рычаги 6 и 13 замкнуты между собой пружиной 19. На двух рычагах 20 параллелограммного механизма, шарнирно закрепленных на кронштейне 1, с помощью осей 21 установлена кулиса 22, которая несет цилиндр 23 цилиндрического фиксатора и подпружиненную собачку 24 для взаимодействия с ним. Кинематически кулиса 22 и рычаги 20 замкнуты пружиной 25. Магазин со стопой деталей 26 имеет паз для взаимодействия упора 10 и щупа 14 со стопой деталей 26. Устройство работает следующим образом. Держатель 3 опускают вниз для соприкосновения вакуумного захвата 2 с верхней деталью стопы 26. При этом щуп 14 первым подходит к верхней детали стопы 26 и останавливается. Держатель 1 с захватом 2, продолжая опускаться, сжимает пружину 7, а ролик 4 в определенный момент нажимает на кулачок 12 и поворачивает двуплечий рычаг 6 против часовой стрелки. При этом подпружиненный упор, 10 входит в соприкосновение со стопой деталей 26, сжимая пружину 11, и торцом с насечками удерживает детали кроме верхней, так как расстояние между нижней плоскостью щупа 14 и верхним торцом упора 10 больше толщины детали, но меньше полутора толщин детали. При повороте рычага 6 выступ 9 нажимает на выступ 15 щупа 14 рычага 13 и поворачивает последний против часовой стрелки, выводя тем самым щуп из зоны стопы. Так как щуп 14 рычага 13 жестко связан с верхним плечом 16, последний вместе с собачкой 17 поворачивается также против часовой стрелки, и собачка 17 занимает положение слева от цилиндра 23. Захват 2, дойдя до стопы 26, притягивает верхнюю деталь и поднимается вверх для переноса детали на рабочую позицию. Пружина сжатия 7, выполняющая дополнительно функцию пружины кручения, после выхода кулачка 12 из контакта с роликом 4 поворачивает рычаг 6 по часовой стрелке и выводит упор 10 из соприкосновения со стопой деталей 26.
Собачка 17 опускается относигельно цилиндра 23, находясь слева от Heio, чтс препятствует рычагу 13 повернуться по часовой стрелке и вернуться щупу 14 в зону стопы.
При подъеме захвата 2 с деталью собачка 24 под действием упора, жестко закрепленного на основании, проворачивается на оси по часовой стрелке, и деталь переносится в рабочую зону.
11осле освобождения захвата 2 от дет-чли кронштейн 1 опускается вниз отделения следующей детали. Собачка 24 вновь взаимодействует с жестким упором, но теперь она заставляет кулису 22 с цилиндром 23 совершать плоско-параллельное движение вверх и влево. Собачка 17 освобождается, и пружина 19 поворачивает рычаг 13 по часовой стрелке, тем самым возвращая щуп 14 в зону стопы 26.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отделения плоских заготовок от стопы | 1986 |
|
SU1393505A1 |
| Устройство для поштучной выдачи деталей | 1988 |
|
SU1608000A1 |
| Устройство для перекладки изделий | 1980 |
|
SU893805A2 |
| Устройство для автоматической подачи заготовок и выдачи готовых задников к машине для формования задников | 1955 |
|
SU107378A1 |
| Автоматическая линия для многопозиционной листовой штамповки | 1986 |
|
SU1470398A1 |
| Станок для сборки узлов запрессовкой | 1978 |
|
SU745642A1 |
| Стапелирующее устройство к прессу | 1976 |
|
SU716678A1 |
| Устройство для упаковывания цилиндрических изделий | 1984 |
|
SU1303496A1 |
| Устройство В.И.Васильева для штамповки деталей из листового материала | 1986 |
|
SU1388166A1 |
| Устройство для маркировки и укладки дискообразных изделий | 1987 |
|
SU1504167A1 |
1. УСТРОЙСТВО ДЛЯ ОТДЕЛЕНИЯ ИЗ СТОПЫ ДЕТАЛЕЙ С ПЛОСКОЙ И КРИВОЛИНЕЙНОЙ ПОВЕРХНОСТЬЮ, содержащее смонтированные на кронштейне вакуумный захват,механизм его перемещения, щуп и подпружиненный упор, отличающееся тем, что, с целью повышения надежности работы устройства, механизм перемещения вакуумного захвата включает смонтированные на кронштейне параллелограммный механизм с цилиндрическим фиксатором, ролик и пару вертикальных двуплечих рычагов, первый из которых полый, а второй размещен в его полости, при этом верхнее плечо полого рычага снабжено кулачком для взаимодействия с роликом, а подпружиненный упор закреплен на нижнем его плече, причем верхнее плечо второго рычага имеет собачку для взаимодействия с цилиндрическим фиксатором, а щуп смонтирован на нижнем его плече. 2. Устройство по п. 1, отличающееся тем, что нижние плечи рычагов снабжены высту(О пами для .взаимодействия одного с другим. (Л ел ГчЭ 4; ел 00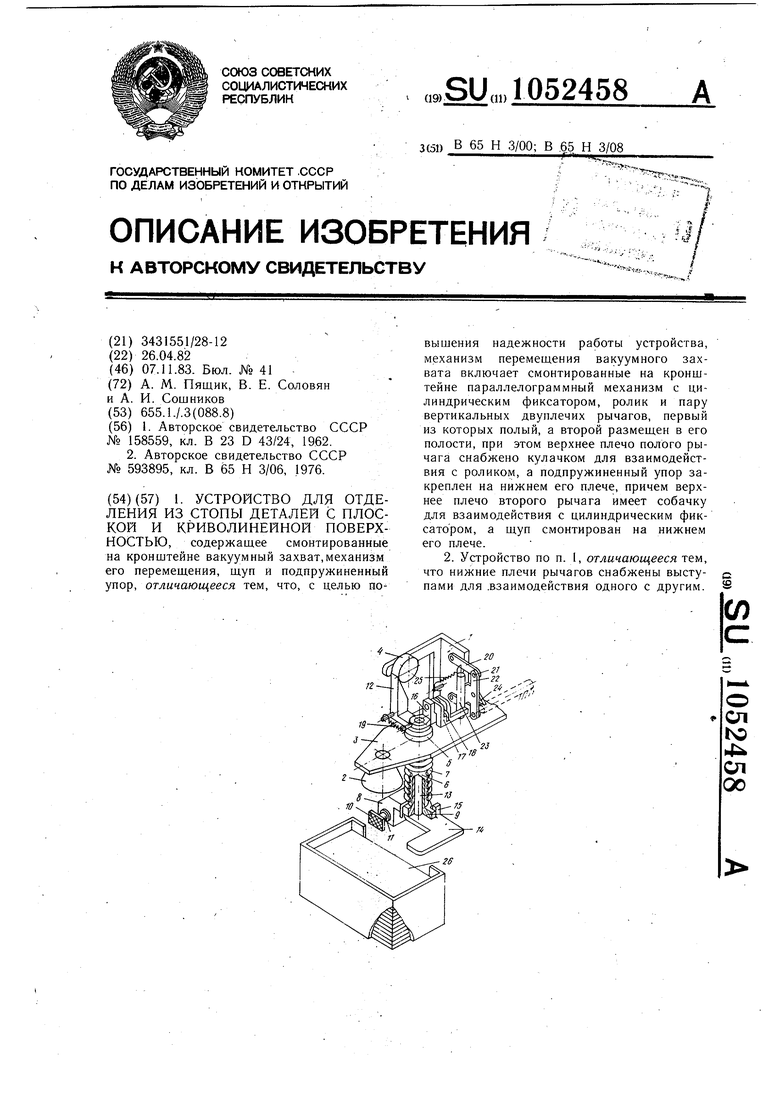
| I | |||
| 0 |
|
SU158559A1 | |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для отделения из стопы деталей с криволиненой поверхностью | 1976 |
|
SU593895A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
