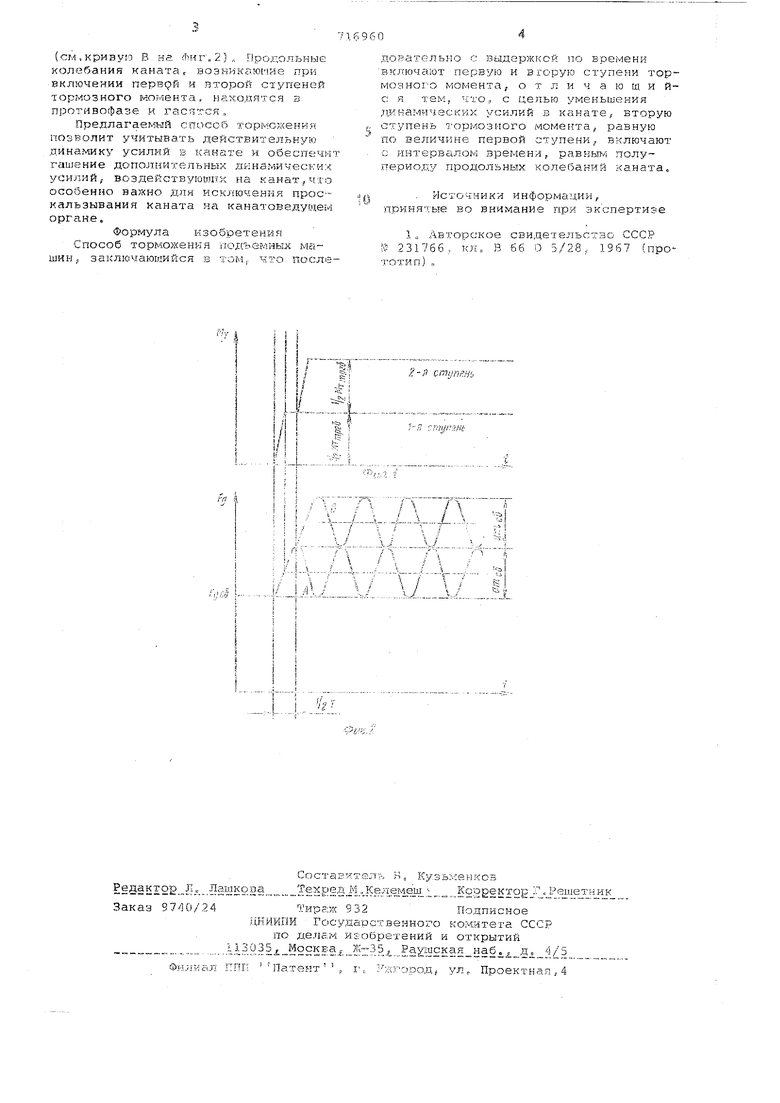
Изобретение откосится к подъемным машинам, в частности к споссоам их торможения, Известен способ торможения подъем ных машин, который заключаетсся в том, что последовательно с выдержкой по времени включают первую и вторую ступени тормозного момента, причем вторую ступень включают с выдержкой по времени через датчик замедления, настроенный на определенную величину замедления 1. Недостатком такого способа являетс.я наличие динамических усилий в канате, так как вторую ступень тормо ного момента вкл очают с выдержкой времени в зависимости от величины замедления самой подъемной машины,что не отражает действительной дина мики усилий в канате. Цель изобретения - уменьшение динамических усилий в канате. Сущность изобретения состоит в том, что последовательно с выдержкой по времени включают первую и вторую ступени тормозного момента, причем вторую ступень тормозного момента, равную по величине первой ступени, включают с интервалом времени, равны пCJ yпepиoдy продольных колебаний каната. На фиг. 1 изображен график включения первой и второй ступеней тормоз Hqro момента; на фиг. 2 - граЛик кзменекк.ч усилий в канате при его продольных колебаниях при двухступенчатом включении тормозного момента. При осушествлении торможения подъемной машины включают тормозное уотройство и создают на канатоведущем органе тормозной момент первой ступени, равный по величине половине требуемого тормозного момента. Включение первой ступени тормозного момента вызывает продольные колебания каната (см.кривую А на фиг.2),амплитуда которых составляет половину амплитуды продольных колебаний каната в случае бесступенчатого включения требуемого тормозного момента. Через половину периода продольных колебаний каната дополнительно включают вторую ступень тормозного момента, равную по величине, как и первая ступень, половине требуемого- тормозного момента. Включение второй ступени тормозного момента вызывает дополнительные продольные колебания каната
(см.кривуп в на Фиг ,2),. Продольные колебания каната, возникающие при включении первфй и второй ступеней тормозного момента, находятся з противофазе и гасятся,,
Пpeдлaгae jьJй способ тормо-жения: позволит учитывать действительную динамику усилий в канате и обеспечи гашение дополнительных динамических усилий, воздействуюилтх на канат,что особенно важно для исключения проскальзывания каната на канатоведуглен органе.
Формула изобретения
Способ торможения подъемных машин, заютючающийся в тон, что пос;ле
довательио с выдержкой по времени включают первую и вторую ступени тора ю щ и йм о 3 и о 1/ о м о м е н т а i
о т
и с я тем. что, с цепью уменьшения динамических усилий в канате, вторую ступень 1ормозно1-о MOMetrra, равную по величине первой ступени, включают с интервалом времени, равны -/ полупериод / продольных колебаний каната.
Источники HiifiopMauHH, принятые во внимание при экспертизе
1„ Авторское свидетельство СССР № 231766, кл, В 66 О 5/28, 1967 (прототип) ,
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТОРМОЖЕНИЯ ПОДЪЕМНЫХ МАШИН | 2007 |
|
RU2342309C1 |
| Способ торможения подъемной машины | 1982 |
|
SU1054284A2 |
| Способ предохранительного торможения подъемной машины | 1983 |
|
SU1346552A1 |
| Устройство управления предохранительным тормозом грузоподъемной машины | 1969 |
|
SU676543A1 |
| Устройство для управления предохранительным торможением подъемной установки | 1975 |
|
SU753761A1 |
| Устройство для регулирования тормозного усилия канатного подъемника | 1985 |
|
SU1416426A1 |
| Способ дискретного управления тормозом шахтной подъемной машины | 1989 |
|
SU1715705A1 |
| Способ дискретного управления предохранительным торможением | 1976 |
|
SU659517A2 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ТОРМОЖЕНИЕМ ШАХТНОЙ ПОДЪЕМНОЙ МАШИНЫ | 1992 |
|
RU2041152C1 |
| Способ дискретного управления предохранительным торможением | 1986 |
|
SU1447745A1 |
.,
Z-fl ступень
