Изобретение относится к подъемным машинам, в частности к способам их торможения.
Известен способ торможения подъемных машин, аналогичный предлагаемому (авторское свидетельство СССР №231766, кл. В66D 5/28, 1967), который заключается в том, что последовательно с выдержкой по времени включают первую и вторую ступени тормозного момента, причем вторую ступень включают с выдержкой по времени через датчик замедления, настроенный на определенную, для данной машины постоянную, величину замедления.
Недостатком такого способа является наличие динамических усилий в канате, так как вторую ступень тормозного момента включают с выдержкой времени в зависимости от величины замедления самой подъемной машины, что не отражает действительной динамики усилий в канате, зависящей от массы, скорости поднимаемого груза и других факторов.
Дальнейшим совершенствованием способа-аналога является способ торможения подъемных машин, защищенный авторским свидетельством СССР №716960, кл. В66В 1/24 (В66В 1/32, В66D 5/00), опубликованный в 1980 г. Этот способ, выбранный нами в качестве прототипа предлагаемого, уменьшает динамические усилия в канате. Достигается это за счет того, что последовательно с выдержкой по времени включают первую и вторую ступени тормозного момента, причем вторую ступень тормозного момента, равную по величине первой ступени, включают с задержкой времени, равной половине периода продольных колебаний.
Несмотря на то, что способ-прототип обладает преимуществами перед аналогом, уменьшение динамического усилия в канате он обеспечивает лишь частично. Это обусловлено тем, что к моменту времени, когда включается вторая ступень тормозного момента, период продольных колебаний каната еще не истек даже один раз, а потому в точности неизвестен. Он может быть только спрогнозирован, но, как известно, всякий прогноз, каким бы способом он не осуществлялся, результаты дает только приблизительные. Отсюда следует, что включение второй тормозной ступени по способу-прототипу реально может быть произведено лишь с задержкой по времени, равной приблизительно половине периода. Это и обеспечивает лишь частичное уменьшение динамического усилия в канате.
Задачей, решаемой предлагаемым изобретением, является повышение эффективности уменьшения динамического усилия в канате и в конечном итоге ликвидация этого усилия.
Сущность предложения состоит в том, что равные по величине тормозного момента первую и вторую ступени включают последовательно, причем включение второй ступени по отношению к первой производят с задержкой времени, равной целому числу плюс половина периодов продольных колебаний каната. Иначе говоря, включение второй ступени по отношению к первой производится с задержкой времени, равной половине периода продольных колебаний каната, и еще дополнительно (предварительно) с задержкой на время, равное целому числу периодов. За время дополнительной (предварительной) задержки период продольных колебаний каната измеряют, а измерение дает более точный результат, чем прогноз. Имея точное (измеренное, а не спрогнозированное) значение длины периода, отсчитав время с момента включения первой ступени тормозного момента, кратное числу периодов плюс половина, можно практически точно, а не приблизительно, определить момент времени, когда нужно включить вторую ступень тормозного момента.
На фиг.1 изображен график включения первой и второй ступеней тормозного момента; на фиг.2 - график изменения усилий в канате при его продольных колебаниях при двухступенчатом включении тормозного момента. Мт1 - величина первой ступени, Мт2 - величина второй ступени. Видно, что Мт1 равно Мт2. Fд1 - амплитуда продольных колебаний каната при включении первой тормозной ступени, Fд2 - то же при включении второй ступени. Так же видно, что Fд1 равно Fд2. Т - период продольных колебаний усилия в канате, tизм - время, в течение которого производится измерение Т, tвкл. - время, через которое производится включение второй тормозной ступени по отношению к первой.
Пусть с момента включения первой ступени тормозного момента (фиг.1, кривая 1) прошло примерно три периода продольных колебаний каната (фиг.2, кривая 1). Измерение продолжительности периода, произведенное за это время, показало, что он равен, допустим, 1,2 секунды. Тогда, отсчитывая время с момента включения первой ступени, в частности, 4,8+0,6 секунды (четыре с половиной периода) и включая через это время вторую ступень (фиг.1, кривая 2), мы наложим на канат противоколебания (фиг.2, кривая 2), в точности попадем в противофазу колебаний, созданных первой ступенью, обеспечим практически полный контррезонанс продольных колебаний каната и полностью ликвидируем эти колебания.
Поскольку период продольных колебаний каната измерен, а не спрогнозирован, то обеспечить попадание противоколебаний в противофазу с колебаниями, созданными первой ступенью, можно практически точно (эксперименты показывают, что точнее на 15-25%). Таким образом и осуществляется решение поставленной задачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ торможения подъемных машин | 1971 |
|
SU716960A1 |
| Способ торможения подъемной машины | 1982 |
|
SU1054284A2 |
| Способ предохранительного торможения подъемной машины | 1983 |
|
SU1346552A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОРМОЗНОГО ПУТИ АВТОТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2099741C1 |
| Способ дискретного управления тормозом шахтной подъемной машины | 1989 |
|
SU1715705A1 |
| Устройство для регулирования тормозного усилия канатного подъемника | 1985 |
|
SU1416426A1 |
| ЭЛЕКТРОПРИВОД | 2012 |
|
RU2531380C2 |
| Способ дискретного управления предохранительным торможением | 1986 |
|
SU1447745A1 |
| Способ дискретного управления предохранительным торможением | 1976 |
|
SU659517A2 |
| Способ управления рабочим торможением шахтной подъемной машины | 1980 |
|
SU931637A1 |
Изобретение относится к подъемным машинам, в частности к способу их торможения. В способе двухступенчатого торможения подъемно-транспортных машин вторая ступень торможения включается с задержкой по времени на целое число плюс половина периода продольных колебаний каната, вызванных включением первой ступени. При равенстве тормозных моментов первой и второй ступеней способ позволяет полностью ликвидировать продольные колебания грузового каната, поскольку за время задержки их можно точно измерить. 2 ил.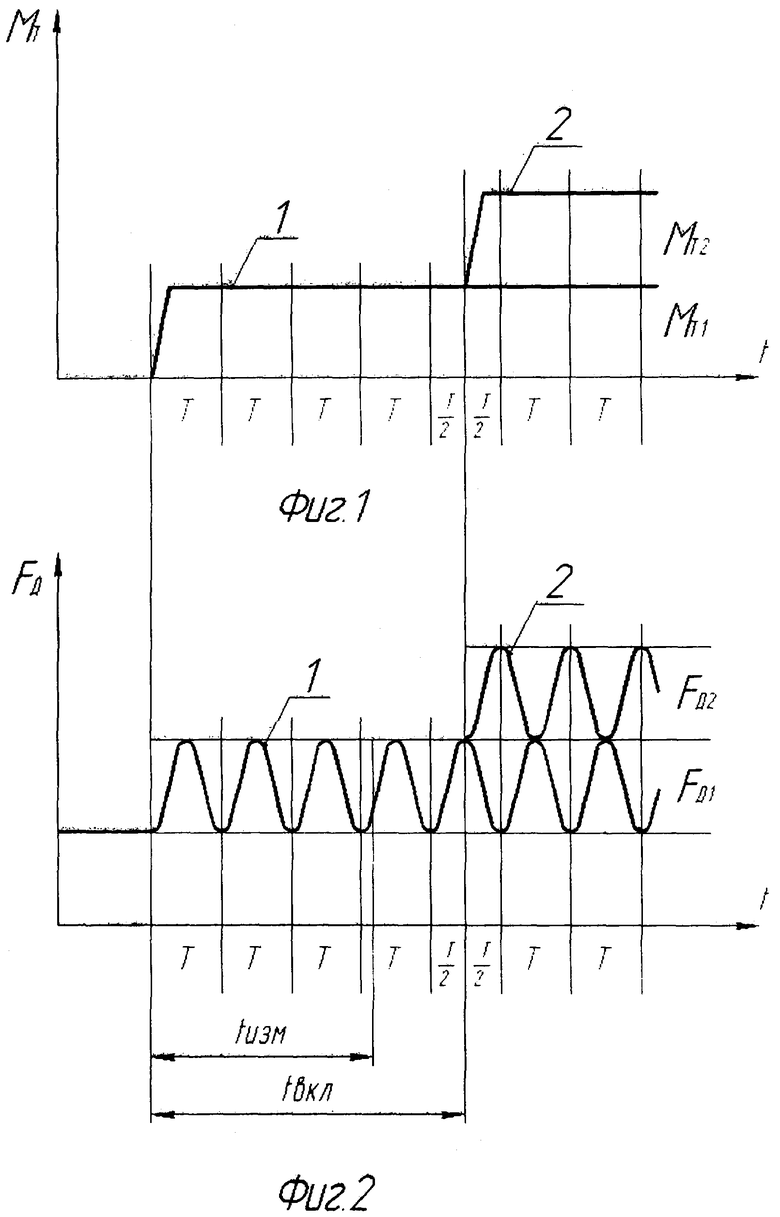
Способ двухступенчатого торможения подъемно-транспортных машин, заключающийся в том, что равные по величине тормозного момента первую и вторую ступени включают последовательно, причем включение второй ступени по отношению к первой производят с задержкой времени, равной половине периода продольных колебаний каната, отличающийся тем, что включение второй ступени предварительно дополнительно задерживают на время, равное целому числу периодов продольных колебаний каната.
| Способ торможения подъемных машин | 1971 |
|
SU716960A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕДОХРАНИТЕЛЬНЫМ ТОРМОЖЕНИЕМ ШАХТНЫХ ПОДЪЕМНЫХ Л\АШИН | 0 |
|
SU231766A1 |
| Способ торможения подъемной машины | 1982 |
|
SU1054284A2 |
| JP 3115080 A, 16.05.1991. | |||

