сриг.1 ,
Изобретение относится к машиностроению, а именно к промышленным роботам, имеюш,им телескопический механизм выдвижения рабочего органа, и может быть применено для автоматизации производственных процессов, в частности процессов дуговой сварки крупногабаритных деталей.
Известен модуль промышленного робота, содержащий привод, корпус с направляющими, подвижную каретку с катками, на которЬ1Х размещена рука робота 1.
Недостатком известного модуля является низкая точность из-за возникающих в процессе эксплуатации люфтов.
Цель изобретения - повышение точности позиционирования.
Указанная цель достигается тем, что модуль промышленного робота, содержащий привод, корпус с направляющими, подвижную каретку с катками, на которых размещена рука робота, снабжен валками, роликами и двуплечими рьгчагами с упругими элементами, при этом валки и ролики закреплены на концах двуплечих рьгчагов, коTopbie шарнирно попарно закреплены на осях катков каретки, при этом валки размещены на руке робота, ролики - на направляющих корпуса, а упругие элементы - между двуплечими рычагами одной пары.
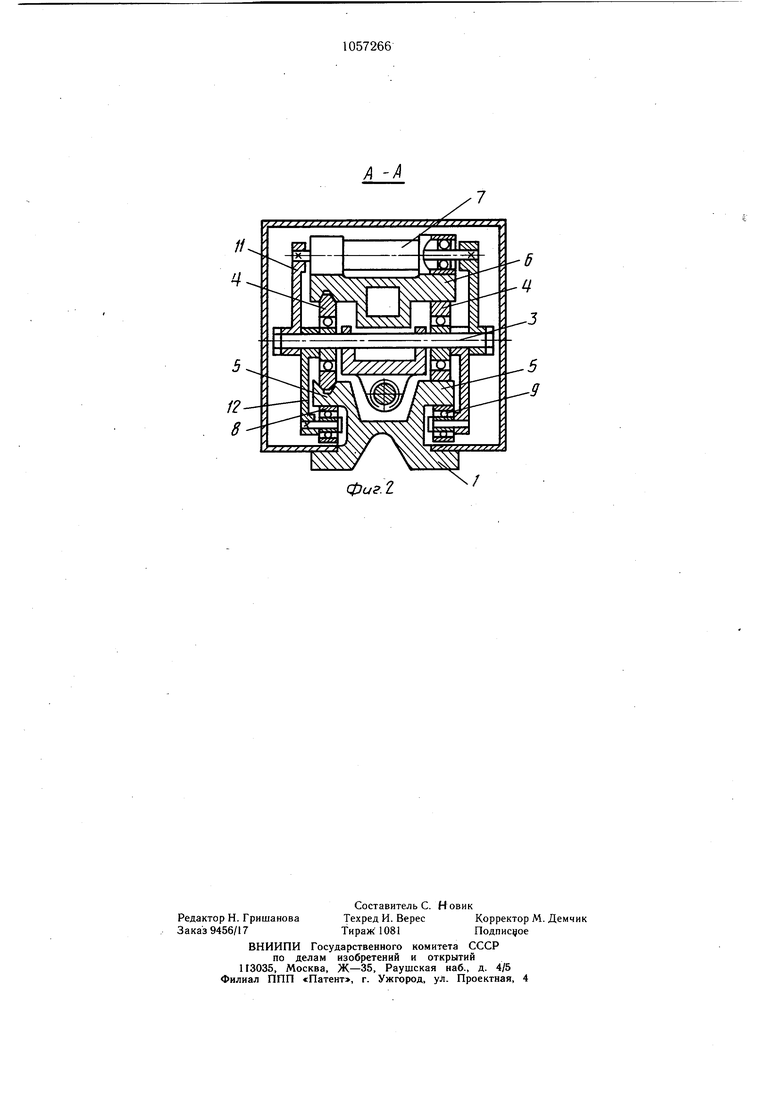
На фиг. 1 изображен модуль промышленного робота; на фиг. 2 - разрез А-А на фиг. 1.
Модуль содержит корпус I, привод 2 с шариковинтовой парой (не показана), перемещающий каретку 3 с катками 4 по направляющим 5.
Для предотвращения перемещения катков 4 в поперечном направлении по длине их хода направляющие 5 выполнены одна призматической, другая прямоугольной формы, а катки 4 каретки 3 выполнены соответственно форме направляющих 5 сферическими и цилиндрическими, причем катки 4 сферической формы установлены на призматическую направляющую 5, а катки 4 цилиндрической формы - на прямоугольную направляющую 5.
Рука 6 модуля для снижения металлоемкости конструкции и увеличения ее жесткости выполнена в виде профильной щтанги, имеющей форму тавра и прижата к каткам 4, каретки 3 попарно расположенными на ней валками 7, соединенными один с другим упругими элементами 8.
В свою очередь, катки 4 каретки 3 прижаты к Направляющим 5 попарно расположенными роликами 9, причем последние расположены на поверхностях направляющих 5, противоположных поверхностям перемещения катков 4 каретки 3, и связаны одни с другим упругими элементами 10.
Каждый из валков 7 и роликов 9 посредством соответствующих двуплечих рьгчагов 11 и 12 закреплен на концах осей каретки 3.
За счет усилия, развиваемого упругими элементами 8 и 10 в точках контакта валков 7 с рукой 6 и роликов 9 с направляющими 5, обеспечивается предварительный натяг между рукой 6 модуля, катками 4 каретки 3 и направляющими 5.
Во избежание проскальзывания руки 6 модуля относительно ведущих поверхностей катков 4 каретки 3 во время действия ускорений (во время разгона и торможения привода 2) рука 6 модуля и направляющие 5 Находятся в зацеплении посредством щестерни и двух зубчатых реек (не показаны).
Модуль работает следующим образом.
Включают привод 2. От привода 2 через предохранительную муфту и шариковинтовую пару (не показаны) движение передается на каретку 3. Во время движения каретки 3 опорные поверхности катков 4 контактируют с направляющими 5, а противоположные поверхности катков 4 контактируют с рукой 6 модуля и сообщают ей удвоенное перемещение относительно направляющих 5.
Создание предварительного натяга между взаимно перемещающимися кЬнструктивНыми элементами модуля повышает контактную жесткость сопрягаемых подвижных элементов за счет выборки люфтов, образующихся от неточностей изготовления деталей и сборки модуля.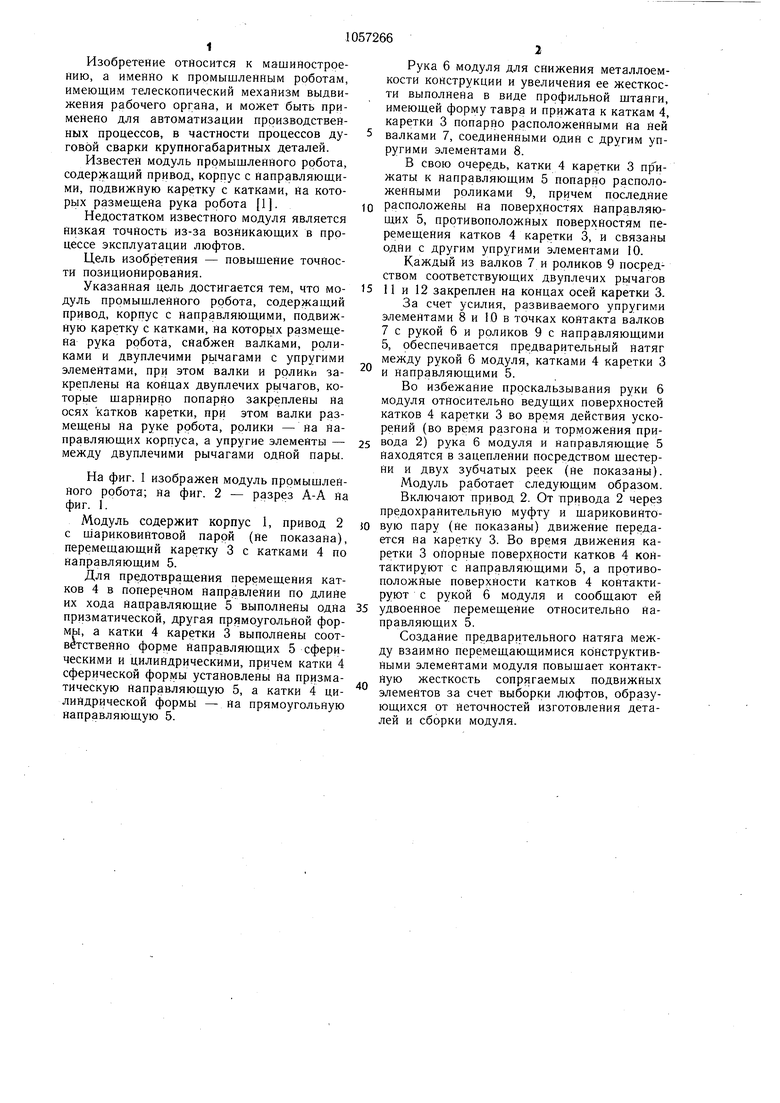
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль промышленного робота | 1982 |
|
SU1033307A1 |
| Многоцелевой промышленный робот | 1989 |
|
SU1669686A1 |
| Манипулятор | 1975 |
|
SU523796A1 |
| Промышленный робот | 1987 |
|
SU1481057A1 |
| Промышленный робот | 1977 |
|
SU743862A1 |
| ИНТУИТИВНАЯ МАССАЖНАЯ СИСТЕМА МАНИПУЛЯТОРНОГО ТИПА (ВАРИАНТЫ) | 2022 |
|
RU2785828C1 |
| УСТАНОВКА ДЛЯ СВАРКИ ТЕПЛООБМЕННИКОВ С ЛЕПЕСТКОВЫМИ ПОВЕРХНОСТЯМИ НАГРЕВА | 1994 |
|
RU2041040C1 |
| Устройство для управления перемещением подвижных узлов,например, исполнительных механизмов работаманипулятора | 1974 |
|
SU515633A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ РАДИОЭЛЕМЕНТОВ ИЗ СТОПЫ | 1998 |
|
RU2141748C1 |
| Промышленный робот | 1988 |
|
SU1604496A2 |
МОДУЛЬ ПРОМЫШЛЕННОГО РОБОТА, содержащий привод, корпус с направляющими, подвижную каретку с катками, на которых размещена рука робота, отличающийся тем, что, с целью повышения точности позиционирования, он снабжен валками, роликами и двуплечими рычагами с упругими элементами, при этом валки и ролики закреплены на концах двуплечих рычагов, которые щарнирно попарно закреплены на осяхкатков каретки, кроме того, валки размещены на руке робота, ролики на направляющих корпуса, а упругие элементы - между двуплечими рычагами одной пары.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор | 1979 |
|
SU850372A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
