(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Сбалансированный манипулятор | 1988 |
|
SU1517251A1 |
| Штабелер для обслуживания полочных стеллажей | 1982 |
|
SU1031860A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Устройство для зачистки поверхности | 1980 |
|
SU918047A1 |
| АВТОМАТИЗИРОВАННОЕ ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО | 1995 |
|
RU2085461C1 |
| Устройство для выгрузки сыпучих грузов из крытых железнодорожных вагонов | 1986 |
|
SU1384505A1 |
| РЕВЕРСИВНЫЙ ПРОКАТНЫЙ СТАН | 1996 |
|
RU2112614C1 |
| УСТРОЙСТВО УПРАВЛЯЕМОГО ЗАПУСКА НАНОСПУТНИКОВ И МИКРОСПУТНИКОВ | 2014 |
|
RU2551408C1 |
| Перегрузочное устройство | 1991 |
|
SU1792903A1 |
| Манипулятор | 1985 |
|
SU1371899A1 |
Изобретение отнсх;ится к 1юяьеыко- ранспортному оборудованию и быть приме-вено в судостроении для установки при првварке концевой арматуры Сфтандев,, заглушек), и в других отраслях промышленнсстг-г, 5 например тяжелом машинсстроениИс,
Известен манипулятор, содержаздай ко- лонну с кареткой, снабженной огракз гчительнымн попарно накрестлежащими катка: Е в обоймах и блсжамЕ привода, причем тфй боль-Ю шом весе изделия а при перемещении его на большую высоту (З м и более) такие колонны требуют высокой тсчнос-ти азгот&з- ления, нмеют большие габариты и вес, что увеличивает общий вес манипулятора и они- IS жает его динамические характеристЕкй.
Кроме того, наличие зазоров между катками кареток и направляющими нарушает плавность работы манипулятора - появлшотся рьюки при перемещении груза в горизоН - 20 тальной плоскости в момент пересечения вер-тшсальной ппоскост-и, проходящей через вертикальную ось каретки и вертикальную ось поворота руки. Такие рьюкн опасны для обслуживающего персонала, а также снажа« 25
ю-т надежклть кснструкцк :. так как они вызыЕазтз: ярагхцо.&рема::-:.,:ло;й износ узлов ма ниа ля-горЭ;
и.&кь иасбрвгенз-й повышение динамических качастБ г анипу,ш1тсра,
Дсстигзетг::я это , что две обоймы выполнены 3 ЗЕде двуплечих рьгчагов с возмож нос:ть о ИХ noBOpOi-a па даретке, накрестле- кащие огран етсите.-1ьные Kai-i-cn установлены на нару:-{ ; тых., л блоки 1 р1::вода кареткк на виз тренЕих плечах эгмх р;;-,-1агоз, при этом соотношение пдеч « поцьм:к; ь;х масс удовлетворяет за,цанному негравенствуо
Такое вьшоякзг.гке карэт: :и манипулятора позволяет обеспечн-ть пос ;:-яннь й контакт между катками я нагфакишдощямк, а усилие, возникающее на катках з результате воздействия груза и массы подвегленной части манияулй-1Х ра. уравнивает силь, возникающие от мсменга сил груза при его перемеш.ении S горизонтальной плоскоста.
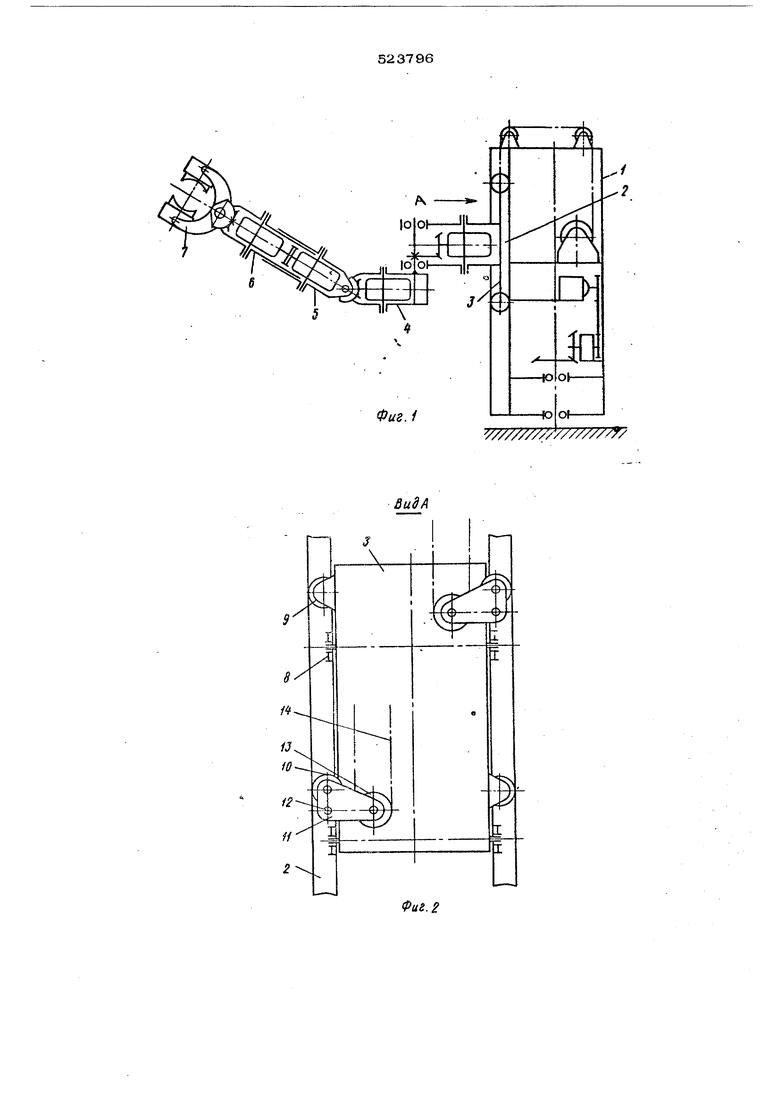
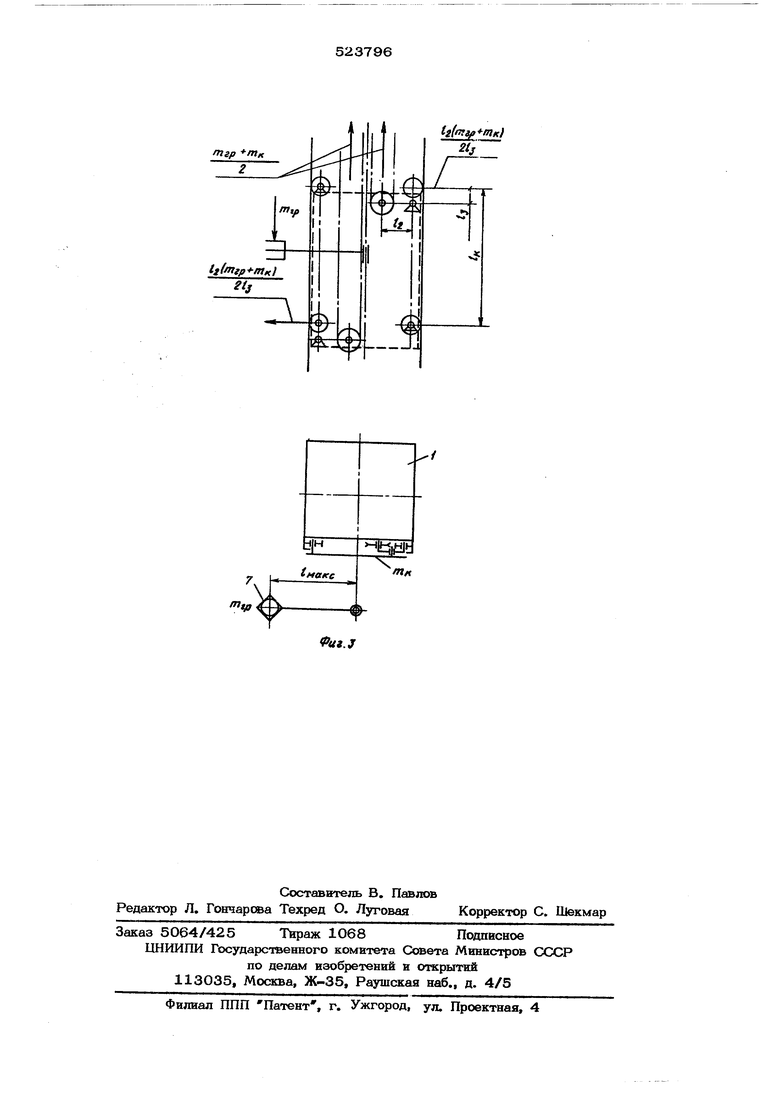
Ка фиг . 1 наШра/кена канематвгческая схема манип.улятора| на фиг. 2 - кинематическая схема лодвески манипулято- pa (вид по стрелке А на фиг. 1); на фиг.З силовая схема подвески. Манипулятор содержит поворотную колонну 1 с направляющими 2 и каретку 3, вертикально перемешающуюся по направляющим На каретке 3 закреплены звенья 4, 5 и 6 ориентации груза с захватом 7, На каретке 3 установлены на неподвижных осях четыре продольных катка 8, служащих для вертикального перемещения каретки 3 по направляющим 2. Каретка снаб/жена также двумя ограничительными поперечными катками 9, установленными на неподвижных осях, и двумя ограничительными поперечными катками 10, закрепленными на концах обойм 11. Обоймы представляют собой двуплечие рычаги, установленные с возможностью поворота на осях 12, закрепленных на каретке 3. На других свободных концах обойм 11 установлены блоки 13, на которых канатом 14 подвешена подъемная часть манипулятора. Для того, чтобы ограничительные катки Ю всегда были прижаты к направляющим 2 соотношение плеч и масс манипулятора но удовлетворять неравенству: где - масса груза; масса каретки; максималькьш вьшег груза; расстояние между ограничительным катками; к - расстояние между осью блока и осью поворота обоймы; - расстояние между осью поворота обоймы и осью ограничИтельного катка. Манипулятор работает следующим образом. Поворотом колонны 1 и звена оёеспечи- вается перемещение груза в горизонтальной плоскости, поворотом звена 5 в вертикал ной ПЛОСКОС.ТЙ и звена 6 вокруг его продольной оси обеспечивается ориентация груза в пространстве. Захват 7 удерживает груз во время его перемещения и ориентации. Каретка 3, перемещаясь по направляющим 2, обеспечивает вертикальное перемещение груза.. Масса груза и подвешенной части манипулятор а, действуя через блок.,. 13 и обоймы 11 на ограничительные 10,прижимаетограничите.льные катки Ю к направляющим 2, причем сила прижатия ограничительных катков всегда превышает силу, появляющуюся от перемещения в горизонтальной плоскости груза. Ограничительные катки 10 в результате выбранного соотношения плеч и масс всегда; бывают прижаты к направляющим 2, независимо от того, какое положение в простран- стве занимаеТ груз, чем обеспечивается плавная работа манипулятора. Ф-о рмула изобретения Манипулятор, содержащий колонну с кареткой, снабженной ограничительными попарно накрестлежашими катками в обоймах и блоками привода, отличающийся тем, что, с целью повышения его динамических качеств, обоймы выполнены в виде двуплечих рычагов с возможностью их по ворота на каретке, накрестлежащие ограни- чительные катки установлены на наружных, а блоки привода каретки - на внутренних плечах этих рычагов, при этом соотношение плеч и подвижных масс удовлетворяет равенству: где тп - масса груза; т - масса каретки; IWAKC ксимальный вылет груза; t - расстояние между ограничительными катками; t J - расстояние меноду осью блсжа и осью поворОта обоймы; , - расстояние между ось) поворота обоймы и осью ограничительного катка.
Фиг. i
/////////У//////// /
HIM
tnenre
Риг.У
tl() 2h
ШЁР
/Ял
