оо со оо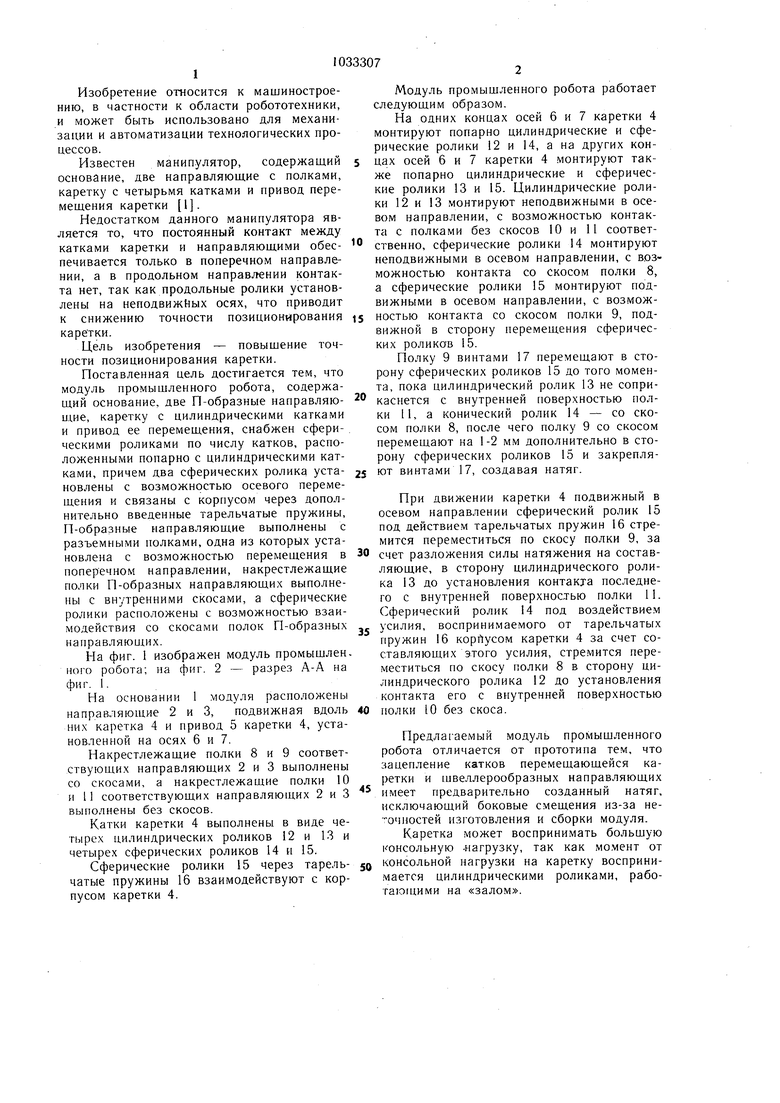
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОВАЯ КАРЕТКА ГРУЗОПОДЪЕМНИКА ПОГРУЗЧИКА | 2024 |
|
RU2828413C1 |
| Устройство для автоматической сварки кольцевых швов | 1985 |
|
SU1263476A1 |
| Модуль промышленного робота | 1982 |
|
SU1057266A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| Устройство для поштучной выдачи плоских заготовок | 1987 |
|
SU1426681A1 |
| Устройство для хранения штучных грузов | 1990 |
|
SU1779654A1 |
| Устройство для загрузки и разгрузки многоярусных стеллажей | 1979 |
|
SU893733A1 |
| СЕКЦИЯ РОЛИКОВАЯ МАШИНЫ НЕПРЕРЫВНОГО ЛИТЬЯ СЛЯБОВЫХ ЗАГОТОВОК | 2007 |
|
RU2350426C1 |
| МОЕЧНЫЙ КОМПЛЕКС СТЕКЛЯННЫХ КРЫШ ТЕПЛИЦ | 1999 |
|
RU2202170C2 |
| ПЕРЕДВИЖНОЙ СТАНОК ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ НИЖНИХ ПОВЕРХНОСТЕЙ КРУПНОГАБАРИТНЫХ ИЗДЕЛИЙ | 2006 |
|
RU2325291C1 |
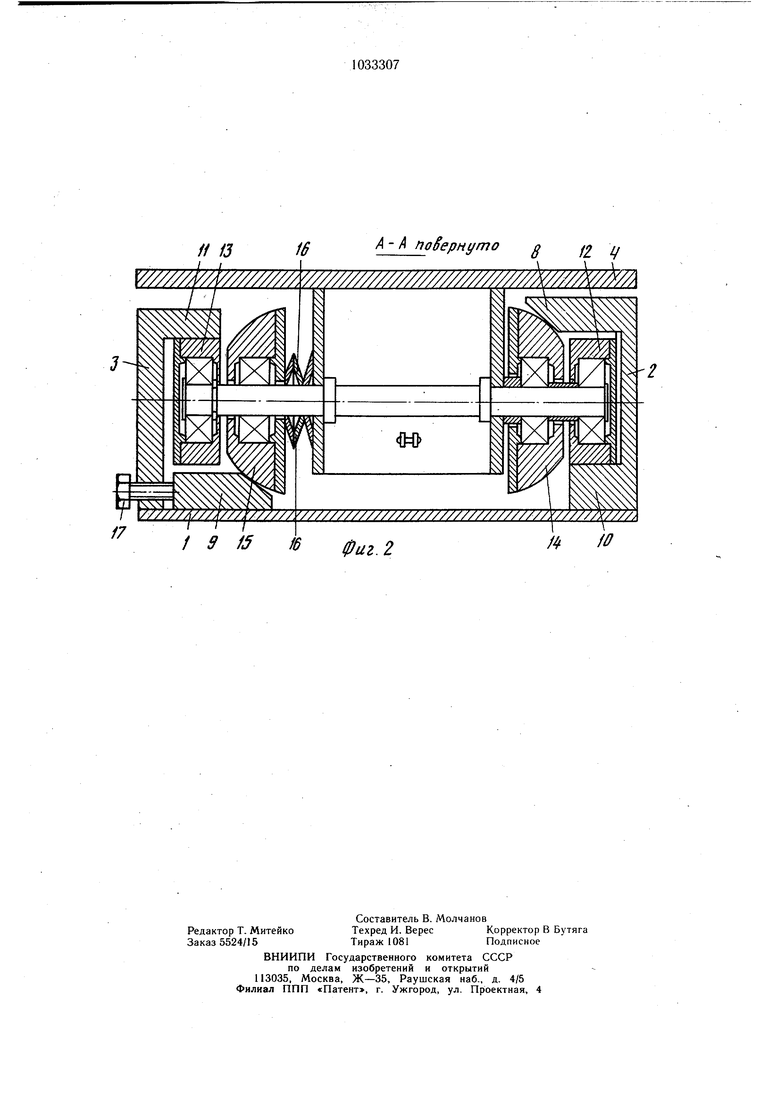
МОДУЛЬ ПРОМЫШЛЕННОГО РОБОТА, содержащий основание, две П-образные направляющие, каретку с цилиндри 1ескими катками и привод ее перемещения, отличающийся тем, что, с целью повышения точности, позиционирования каретки, он снабжен сферическими роликами по числу катков, расположенными попарно с цилиндрическими катками, причем два сферических ролика установлены с возможностью осевого перемещения и связаны с корпусом через дополнительно введенные тарельчатые пружины, П-образные направляющие выполнены с разъемными полками, одна из которых установлена с возможностью перемещения в поперечном направлении, накрестлежащие полки П-образных направляющих выполнены с внутренними скосами, а сферические ролики расположены с возможностью взаимодействия со скосами полок П-образнь1х направляющих.
г. /
Изобретение относится к машиностроению, в частности к области робототехники, и может быть использовано для механизации и автоматизации технологических процессов.
Известен манипулятор, содержащий основание, две направляющие с полками, каретку с четырьмя катками и привод перемещения каретки 1.
Недостатком данного манипулятора является то, что постоянный контакт между катками каретки и направляющими обес- печивается только в поперечном направлении, а в продольном направлении контакта нет, так как продольные ролики установлены на неподвижных осях, что приводит позиционйрования к снижению точности каретки. Цель изобретения - повыщение точности позиционирования каретки. Поставленная цель достигается тем, что модуль промышленного робота, содержащий основание, две П-образные направляющие, каретку с цилиндрическими катками и привод ее перемещения, снабжен сферическими роликами по числу катков, расположенными попарно с цилиндрическими катками, причем два сферических ролика установлены с возможностью осевого перемещения и связаны с корпусом через дополнительно введенные тарельчатые пружины, П-образные направляющие выполнены с разъемными полками, одна из которых установлена с возможностью перемещения в поперечном направлении, накрестлежащие полки П-образных направляющих выполнены с внутренними скосами, а сферические ролики расположены с возможностью взаимодействия со скосами полок П-образных направляющих. На фиг. 1 изображен модуль промыщленного робота; на фиг. 2 - разрез А-А на фиг. 1. На основании 1 модуля расположены направляющие 2 и 3, подвижная вдоль них каретка 4 и привод 5 каретки 4, установленной на осях 6 и 7. Накрестлежащие полки 8 и 9 соответствующих направляющих 2 и 3 выполнены со скосами, а накрестлежащие полки 10 и 11 соответствующих направляющих 2 и 3 выполнены без скосов. Катки каретки 4 выполнены в виде четырех цилиндрических роликов 12 и 13 и четырех сферических роликов 14 и 15. Сферические ролики 15 через тарельчатые пружины 16 взаимодействуют с корпусом каретки 4.
Модуль промышленного робота работает следующим образом.
На одних концах осей 6 и 7 каретки 4 монтируют попарно цилиндрические и сферические ролики 12 и 14, а на других концах осей 6 и 7 каретки 4 монтируют также попарно цилиндрические и сферические ролики 13 и 15. Цилиндрические ролики 12 и 13 монтируют неподвижными в осевом направлении, с возможностью контакта с полками без скосов 10 и 11 соответственно, сферические ролики 14 монтируют неподвижными в осевом направлении, с возможностью контакта со скосом полки 8, а сферические ролики 15 монтируют подвижными в осевом направлении, с возможностью контакта со скосом полки 9, подвижной в сторону перемещения сферических роликов 15. Полку 9 винтами 17 перемещают в сторону сферических роликов 15 до того момента, пока цилиндрический ролик 13 не соприкаснется с внутренней поверхностью полки 11, а конический ролик 14 - со скосом полки 8, после чего полку 9 со скосом перемещают на 1-2 мм дополнительно в сторону сферических роликов 15 и закрепляют винтами 17, создавая натяг. При движении каретки 4 подвижный в осевом направлении сферический ролик 15 под действие.м тарельчатых пружин 16 стремится переместиться по скосу полки 9, за счет разложения силы натяжения на составляющие, в сторону цилиндрического ролика 13 до установления контакта последнего с внутренней поверхностью полки 11. Сферический ролик 14 под воздействием усилия, воспринимаемого от тарельчатых пружин 16 KOpftycoM каретки 4 за счет составляющих этого усилия, стремится переместиться по скосу полки 8 в сторону цилиндрического ролика 12 до установления контакта его с внутренней поверхностью полки 10 без скоса, Предла1-аемый модуль промышленного робота отличается от прототипа тем, что зацепление катков перемещающейся каретки и швеллерообразных направляющих имеет предварительно созданный натяг, исключающий боковые смещения из-за не очностей изготовления и сборки модуля. Каретка может воспринимать большую консольную -нагрузку, так как мо.мент от консольной нагрузки на каретку воспринимается цилиндрическими роликами, работаюп1ими на «залом. фиг. 2 A-A повернуто о /Й / n fO
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор | 1975 |
|
SU523796A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
