00
00
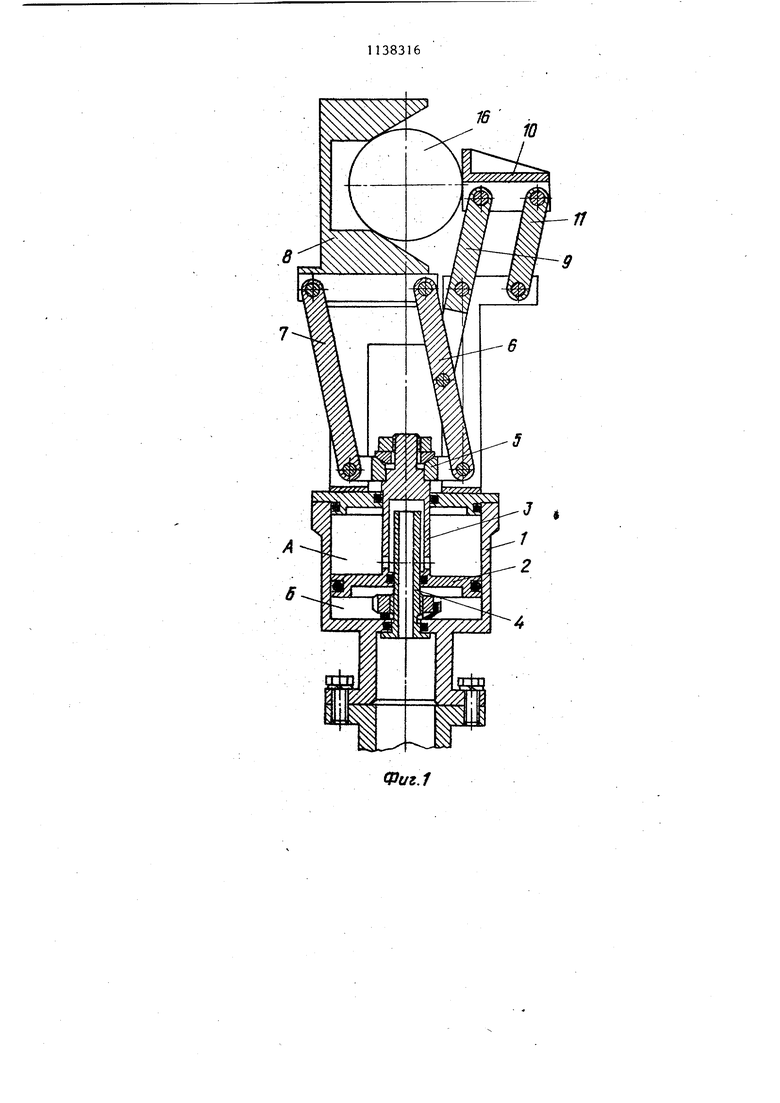
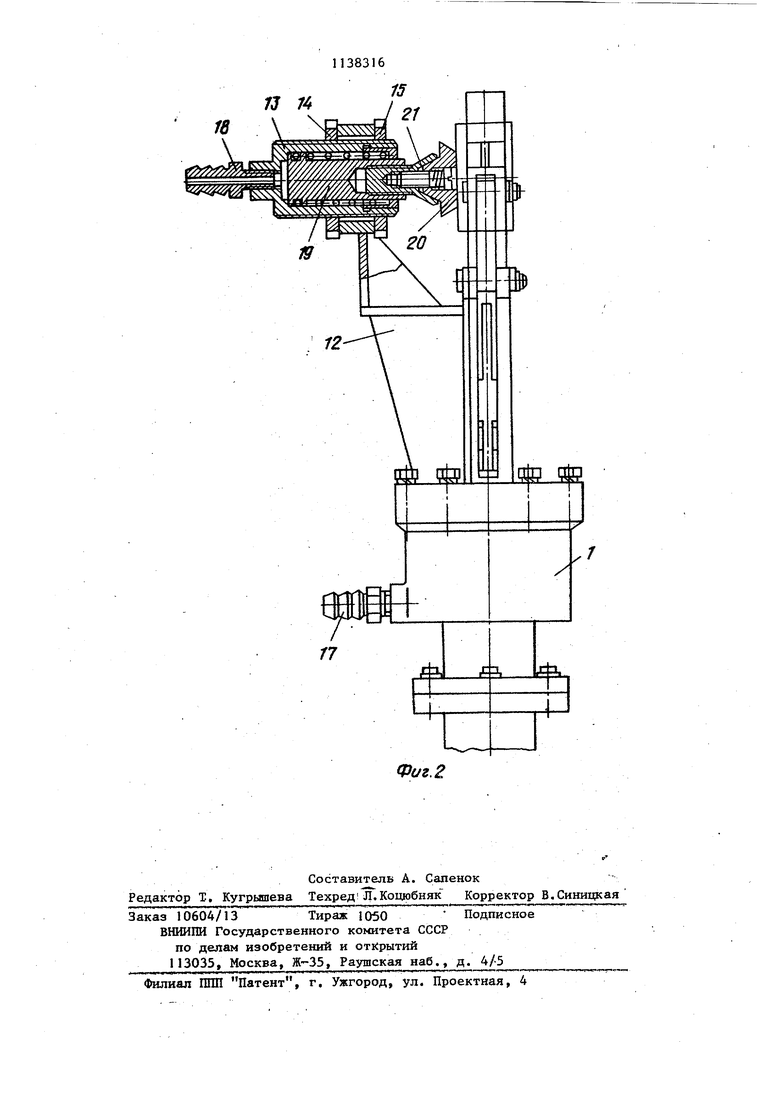
со 1 Изобретение- относится.к роботетехнике и может быть -использовано промьшшенных роботах и манипуляторах, в частности, в робототехничес комплексах при обработке деталей. Известен схват манипулятора, со держащий 1жимные губки, связанные через рычажную систему с силовым цилиндром ll. Недостатком этого схвата являет низкая точность позиционирования подаваемых деталей, что, например, при подаче детали в патрон металлорежущего станка приводит к браку, поломкам режущего инструмента и т.п. Целью изобретения является повышение точности позиционирования под ваемых схватом деталей. Указанная цель достигается тем, что схват манипулятора, содержащий зажимные губки, связанные через рычажную систему с силовым цилиндром снабжен дополнительным силовым цилиндром с толкателем на штоке, при этом корпус дополнительного силового цилиндра установлен с возможност осевого регулировочного перемещения на введенном в схват кронштейне закрепленном на корпусе силового гидроцилиндра, и расположен с возмо ностью взаимодействия толкателя с деталью, находящейся между зажимным губками. На фиг, 1 схематически показан схват манипулятора, разрез; на фиг. 2 - то же, вид сбоку (частичны разрез по оси дополнительного силового цилиндра с толкателем на штоке ). В корпусе силового цилиндра I, прикрепленном к руке манипулятора, помещены поршень 2, выполненный заодно со штоком 3, и воздухопровод 4 Со штоком 3 жестко связано звено 5, входящее в механизм основного парал лелограмма, включающего звенья б и и призматическую губку 8. Дополнительный параллелограмм включает зве 6 но 9, связанное со звеном 6, плоскую губку 10 и звено 11. К схвату посредством кронштейна 12 жестко прикреплен корпус дополнительного силового цилиндра 13, установленный с возможностью регулировки в осевом направлении (в зависимости от высоты деталей) при помощи гаек 14 и 15. Схват манипулятора работает следующим образом.I Воздух, поступая.через внутреннюю полость руки манипулятора, пройдя через воздухопровод 4 и сверления в штоке, попадает в полость А силового цилиндра I, перемещает поршень 2, который через, шток 3, увлекая за собой звено 5, приводит в движение все звенья схвата, сводит его губки и зажимает деталь 6. При разжиме детали 16 воздух одновременно подается через штуцеры 17 и 18 в полость Б силового цилиндра 1 и в дополнительный силовой цилиндр 13. Поршень 2 перемещается в обратном направлении, приводя в движение все звенья схвата. Губки схвата-расходятся и одновременно с этим выдвигается шток 19 цилиндра 13, который толкателем 20, соединенным со штоком 19 шаровым шарниром 21, прижимает деталь 16 к торцам кулачков не показаны), которые являются главной базирующей поверхностью и несут три опорные точки. После этого деталь 16 зажимается в кулачках патрона, которые являются центрирующей базой и несут две опорные точки. Это обеспечивает правильность базирования детали в патроне. Наличие дополнительного - силового цилиндра с толкателем.в конструкции схвата манипулятора позволяет повысить точность установки детали в патроне, с1шзить металлоемкость обработки и расход режущего, инструмента, уменьшить трудоемкость наладки робототехнического комплекса, повысить надежность его работу и эффективность его использования.
8
16
10
Фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Схват | 1982 |
|
SU1060469A1 |
| Схват манипулятора | 1983 |
|
SU1071421A1 |
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
| Захват манипулятора | 1983 |
|
SU1134276A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| ШАРНИРНОЕ ЗАЖИМНОЕ УСТРОЙСТВО | 2019 |
|
RU2729690C1 |
| Пневматический сборочный схват | 1985 |
|
SU1404230A1 |
| Схват манипулятора | 1980 |
|
SU905063A1 |
| Схват манипулятора | 1985 |
|
SU1348168A1 |
СХВАТ МАНИПУЛЯТОРА, содер- жащий зажимные , связанные через рычажную систему с силовым цилиндBfF:;ром, .6 т л и ч a ю щ и.и с я тем, что, с целью повышения точности позиционирования подаваемых схватом деталей, он снабжен дополнительным силовым цилиндром с толкателем на штоке, при этом корпус дополнительного силового .хщлиндра установлен с возможностью осевого регулировочного перемещения на введенном в бхват кронштейне, закрепленном на , корпусе,силового гидроцилиндра и расположен с возможностью взаимодействия толкателя с деталью, находящейся между зазсимныки губками.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Схват манипулятора | 1980 |
|
SU905063A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
