Изобретение относится к механизации и автоматизации производства и может быть использовано в автоматических устройствах, предназначенных для подачи штучных плоских заготовок на штамповочные операции в приборостроении и машиностроении.
Известны вакуумные захваты, используемые в конструкции штампа-автомата, осуществляюшие «транспортирование тонколистовых плоских заготовок из навала в зону действия ориентаторов, а после проведения процессов отделения одной заготовки и ее первичной ориентации - транспортирование этой заготовки к матрице штампа {1.
Недостатком данных вакуумных захватов является то, что они не обеспечивают точности процесса вторичной о риентации, осуществляемой путем поворота заготовки с одной продольной осью симметрии в шюскости торца вакуумного захвата,.
Известен вакуумный захват, используемьш в устройстве для подачи деталей, содержащий корпус с опорным торцом и сквозным осевым каналом {2.
Недостатком известного вакуумного захвата (захватного органа) является то, что он также не обеспечивает точности процесса вторичной ориентации заготовки, осуществляемой поворотом заготовки, удерживаемой вакуумными силами, с помощью иглы в плоскости рабочего, торца вакуумного захвата. Неточность вторичной ориентации заготовки с одной продольной осью симметрии на известном вакуумном захвате обуславливается тем, что, в цроцессе поворота заготовки иглой на неподвижном торце захвата ввиду непостоянства точек контакта торца захвата с поверхностью заготовки всегда возникает смещение заготовки относи- . тельно торца захвата. Для ликвидации указанного смещения необходимо последующее срабатывание ориентирующих планок, что значительно увеличивает продолжительность цикла
загрузочного устройства. I . .
Цель изобретения - повышение надежности
процесса вторичной ориентации заготовки, удерживаемой вакуумными силами на рабочем торце захватного органа, заключающееся в ликвидации возможного смещения заготовки относительно его рабочего торвд.
Поставленная цель достигается тем, что захватный орган, содержащий цилиндрический корпус с опорным торцом и сквозным осевым каналом, снабжен свободно размещенной в осевом канале корпуса ступенчатой втулкой с осевым каналом и плоским |рабочим торцом, а также упором, установленным в канале корпуса со стороны, противоположной рабочему торцу втулки, при этом втулка снабжена опорой, размещенной с возможностью взаимоДействия с упором, осевой ханал корпуса вьшолнен ст:/пенчатым, ступень меньшего диаметра расположена со стороны, противоположной опорному торцу корпуса, а ступень меньщего диаметра втулки выступает из корпуса со стороны его ступени меньщего днаметра.
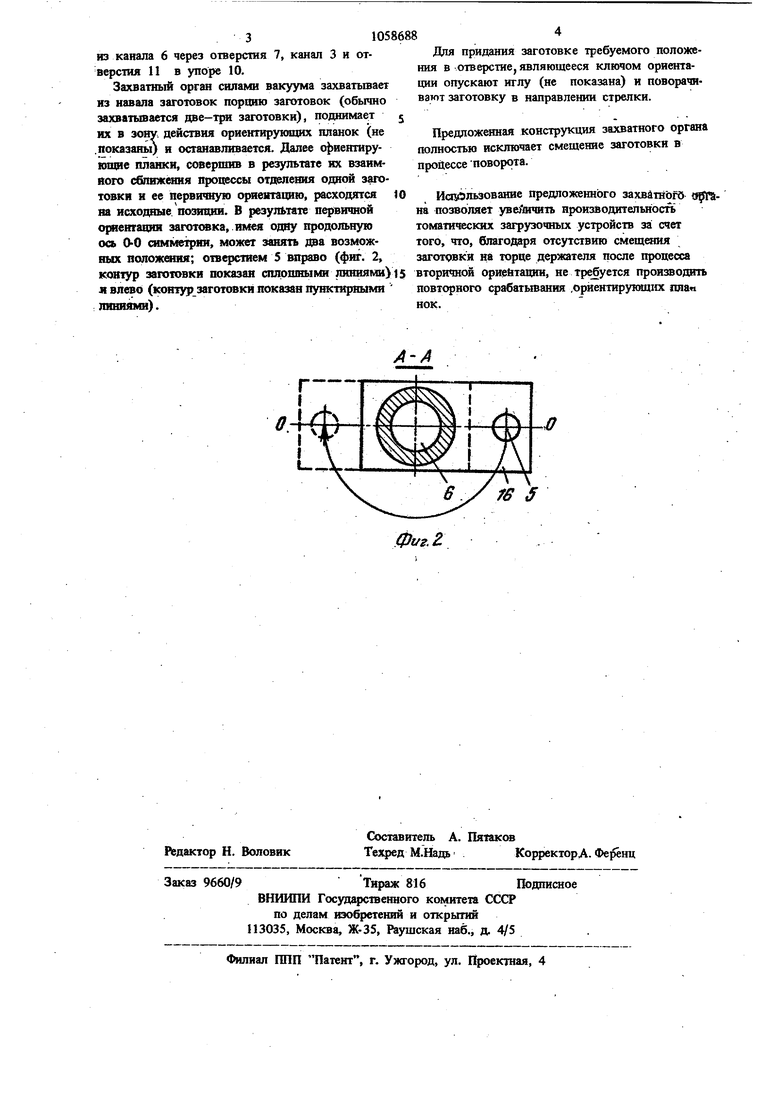
На фиг. Г изображен захватный орган для плоских заготовок, продольный разрез; на фиг. 2 - разрез А-А-на фиг. 1.
Захватный орган для плоских заготовок содержит корпус 1 с резьбой 2 по наружному диаметру, обеспечивающей подсоединение захватного органа к вакуумной сети. В корпусе вьшолнен сквозной канал 3, имеющий в нижиш части у1меньщенный диаметр. В канале находится втулка 4. Нижняя часть втулки 4 с рабочим торцом для заготовки располджена вне корпуса.
Заготовки имеет одну продольную ось 0-0 (фиг. 2) симметрии и элемент асимметрии в виде сквозного отверстия 5. Поворот заготовки из поло:жения, указанного сллошкыми линиями в положение, указанное пунктирными линиями, осуществляется по стрелке игли (не показана). После псшорота сквозное отверстие заготовки занимает новое положение.
Верхняя часта втулки помещша в канале с осевым зазором и радиальными зазорами. 1 сположеиие зазоров обеспечивает хорошие динамические качества работы захватного орган заключающиеся в уменьшенных величинах контактного д;шления между поверхностями втулк держателя и стенками канала корпуса.
Внутри втулки вьшолнен канал 6, который сообщен радиальными сквозными отверстиями 7 с каналом корпуса. С атмосферш канал втулки сообщен со стороны раб()чего торца.
В верхней части держателя расположена опора 8, в которой установлен шарик 9, контактирующий с поверхностью 0, Упор вьшолнен со сквозными отверстиями 11, соединен с корпусом резьбой 12 и зафик(31рован от поворота резьбовым кольцом 13. Устанока диска к рабочее положение согласно требуе мой величине зазора осуществляется с помощью вьшолнени х в упоре шлицев 14, а фиксация упора осуидествляется с помощью вьшолненных в резьбовом кольце шлицев 15.
Захватный орган для плоских заготовок работает следуюцдам образом.
На фиг. 1 и 2 изображен захватньш орган в момент работы, когда на рабочем торце втулки 4 задерживается заготовка 16, прошед шая предыдущий этап первичной ориентации (не показано). Заготовка 16 удерживается на рабочем торце втулки вакуумными силами за счет отсоса воздуха сетью .разряжагаого воздуха из канала 6 через отверстия 7, канал 3 и отверстия И в упоре 10, Захватный орган силами вакуума захватьшает из навала заготовок порцию заготовок (обычно захватывается две-три заготовки), поднимает их в зону, действия ориентирующих планок (не .показань) и останавливается. Далее oJ)Heimipyющие планки, совершив в результате их взаимйого сСЬшжения процессы отделения одной заготовки и ее первича1ую ориентацию, расходятся на исходные позиции. В результате первичной о(«енга1 ии загот жка, имея одну продольную ось 0-0 стлшгряя, может занять даа возможных воложашя; отверстием 5 вправо (фиг. 2, ных воложашя; отверстием э вправо рш. л, контур заготовки показан сплошными линиями) я влево (контур.заготовки показан пунктирными линиями). 1058 Для придания заготовке требуемого положения в отверстие, являющееся ключом ориентации опускают иглу (не показана) и поворачивают заготовку в направлении стрелки. Предложенная конструкция захватного органа полностью исключает смещение заготовки в процессе поворота. ИсвдЭльзование предложенного захватногО позволяет увеличить производительность томатичвских загрузочных устройста за: счет того, что, благодаря отсутствию смещяшя заготовки на торце держателя после процесса iuiv«i - -t- вторичной ориейтадаи. не требуется производить повторного срабатывания .ориентирукшии пла« 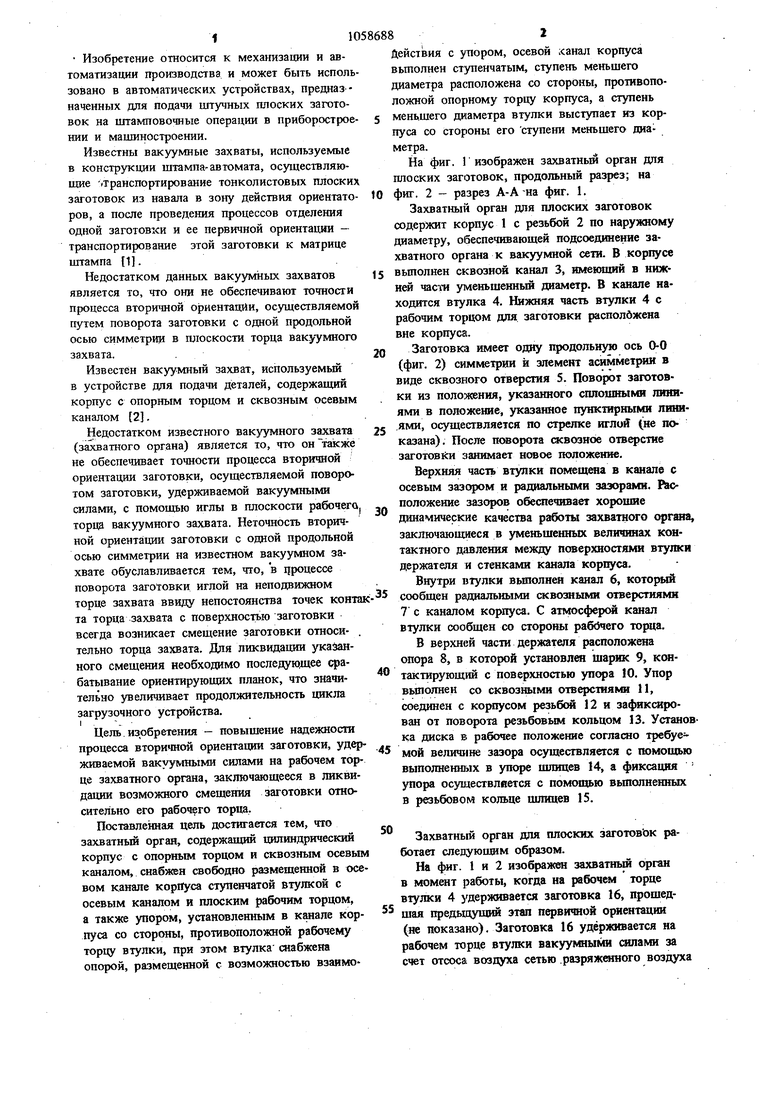
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватный орган для тонколистовых заготовок | 1985 |
|
SU1346308A1 |
| Устройство для поштучной выдачи плоских заготовок из бункера | 1982 |
|
SU1047570A1 |
| Держатель с форсированным усилием | 1982 |
|
SU1055567A1 |
| Устройство для захвата и выдачи плоских заготовок | 1983 |
|
SU1222364A1 |
| Устройство для подачи деталей | 1984 |
|
SU1204305A1 |
| Пневматический захватный орган | 1985 |
|
SU1348038A1 |
| Вакуумный захватный орган | 1981 |
|
SU1011308A1 |
| Устройство для поштучной выдачи заготовок | 1982 |
|
SU1044392A1 |
| Захватный орган для плоских заготовок | 1984 |
|
SU1222365A1 |
| Вакуумный захватный орган для плоских заготовок | 1983 |
|
SU1110528A1 |
ЗАХВАТНЫЙ ОРГАН ДЛЯ ПЛОСКИХ ЗАГОТОВОК, содержащий цюгандрический корпус с опорным торцом и сквозным осевым crrr / :-:.... : П V --.-.: Л I «, - -.. I каналом, отличаю-щийся тем, что, с целью повышения надежности, of снабжен свободно размещенной в осевом канале корпуса ступенчатой втулкой с осевым каналом и плос-/ КИМ рабочим торцом, а также упором, установленным в канале корпуса со стороны, противоположной рабочему торцу втулки, при этом втулка снабжена опорой, размещенной с возможностью взаимодействия с упором, осевой канал корпуса выполнен ступенчатым, ступень меньшего диаметра расположена со стороны, противоположной опорному торцу корпуса, а ступень меньшего диаметра втулки выступает из корпуса со стороны его ступени меньшего диаметра. (Л О СП оо О5 ОО ас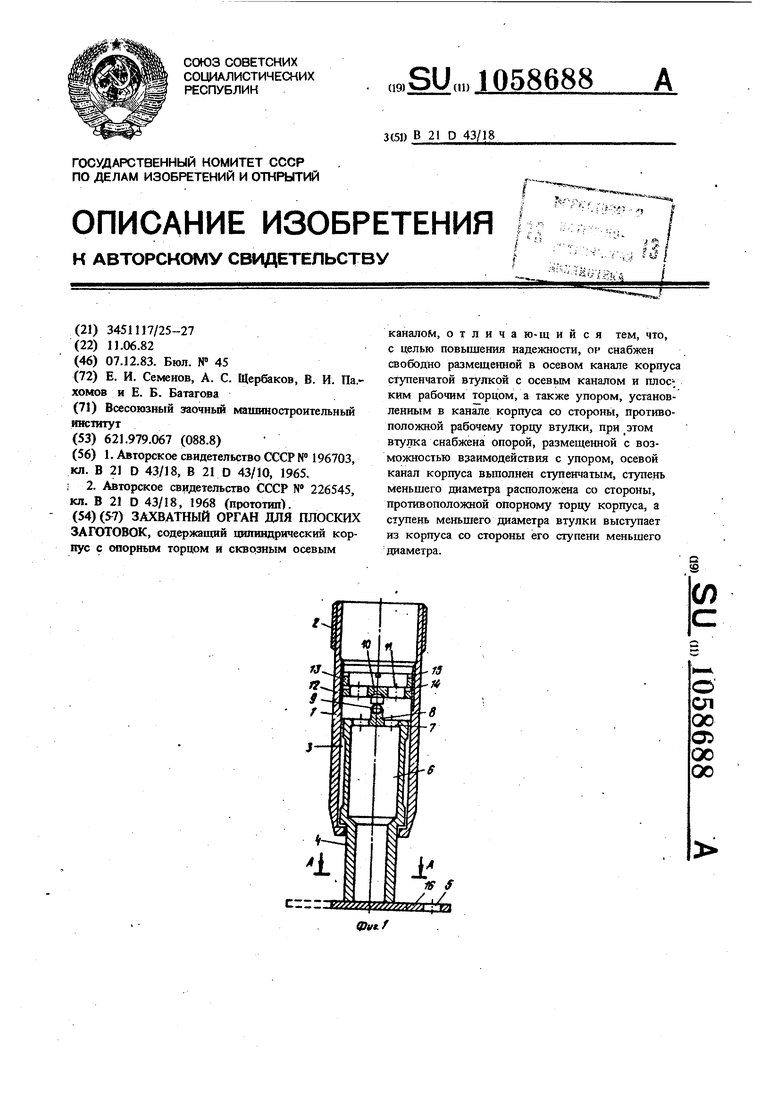
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ШТАМП-АВТОМАТ | 0 |
|
SU196703A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР N 226545, кл, В 21 D 43/18, 1968 (прототип). | |||
