Изобретение относится к тракторостроению и предназначено для автсяиатического вождения трактора при ускоренных ресурсных испытаниях на полигоне.
По основному авт. св. 934294 известно устройство для автоматического вождения трактора при испытаниях на полигоне, содержащее основной трос, кинематически связанный с рулевым приводом испытываемого трактора и подпружиненный относительно его остова, основной якорь, закрепленный на полигоне и имеющий, связь с указанным тросом, шкив, установленный на кронштейне, связанном с остовом трактора, дополнительный трос и дополнительный якорь, закрепленный на полигоне, при этом оба якоря соединены с испытываемым трактором тросовой связью, состоящей из двух ветвей, одной из которых связаны рулевой привод трактора и указанный кронштейн, а другой - упомянутый шкив и оба якоря, установленные в фокусах эллипсной траектории движения трактора (1).
Недостатком данного устройства является постоянство эллипсной траектории движения трактора, параметры которой заранее определены фиксированным расстоянием между якорями и длиной дополнительного троса.
Цель изобретения - повышение эффективности испытаний путем приближения режимов испытаний к реальным условиям эксплуатации.
Указанная цель достигается тем, что устройство для автоматического вождения трактора при испытаниях на полигоне, содержащее основной трос, кинематически-связанный с рулевым приводом испытываемого трактора и подпружиненный относительно его остова, основной якорь, закрепленный на полигоне и имеющий связь с указанным тросом, шкив, установленный на кронштейне, связанном с остовом трактора, дополнительный трос и дополнительный якорь, закрепленный на полигоне, при этом оба якоря соединены с испытываемым трактором тросовой связью, состоящей из двух ват вей, одной из которых связаны рулевой привод трактора и указанный Кронштейн, а другой - упомянутый шкив и оба якоря, установленные в фокусах эллипсной траектории движения трактора, снабжено направлякядей с двумя подвижно установленными в ней каретками и приводной станцией, кинематически связанной с каретками причем оба якоря установлены на каpeTKaXi
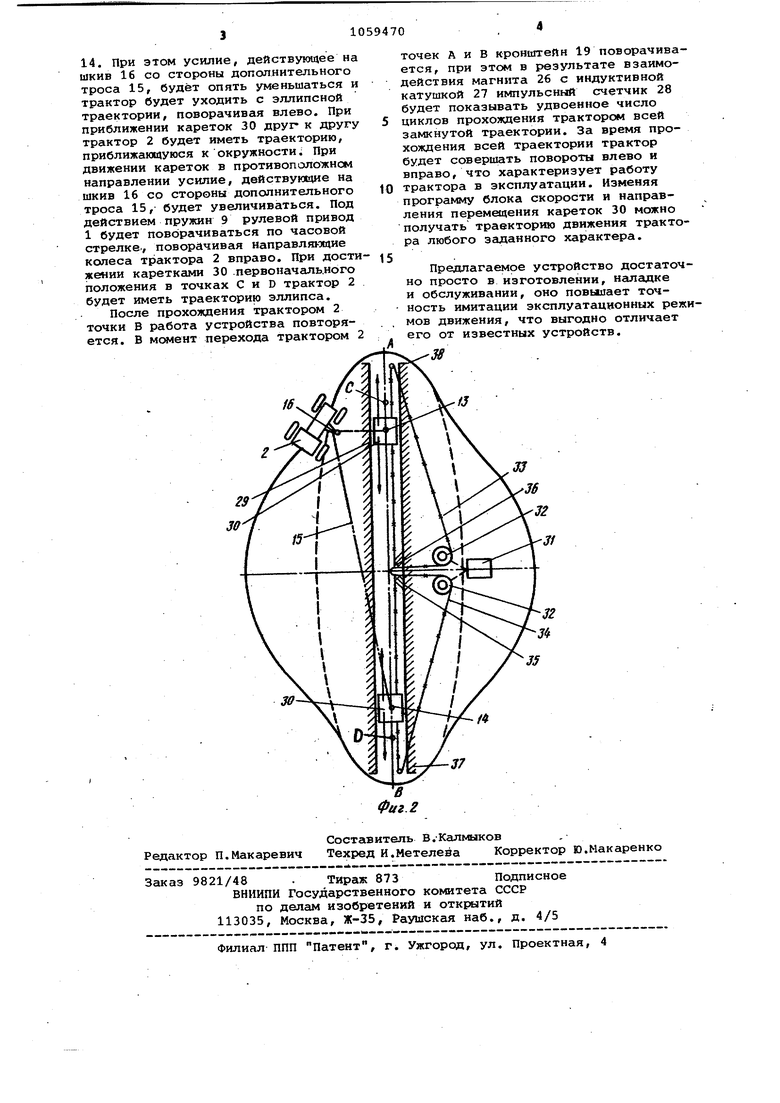
На фиг. 1 изображена кинематическая схема устройства; на фиг, 2 устройство, перемещакяцее якорь, общий вид.
На рулевом колесе 1 испытываемого трактора 2 закреплены з ажимы 3 и 4, к которым присоединенытяги 5 и б, связанные с двуплечим рычаге 7, шарнирно установленным на остове 8 трактора. Двуплечий рычаг 7 одним концом связан с остовом через пружину 9 , а другим - с основным тросом 10, охватывающим блоки 11 и 12, шарнирно установленные на остове трак0 тора.
В устройстве предусмотрены основ ной якорь 13 и дополнительный якорь 14, соединенные с дополнительным тросом 15, охватывающим шкив 16. 5 Последний шарнирно установлен в вилке 17, сое,циненной шарниром 18 с кронштейном 19, установленным на подшипниках 20 в стойке 21, закрепленной на остове трактора.
В кронштейне 19 выполнена цилиндрическая выемка 22, в которую помещен палец 23, удерживаемьлй в выемке 22 с помощью крынки 24, прикрепленной к кроматейну 19. Крышка 24 имеет отверстие ,цля выхода хвостовика 25,
к которому прикреплен основной трос
10. На поворотном кронштейне 19 закреплен магнит 26, взаимодействующий с индуктивной катушкой 27, в цепь которой включен импульсный счетчик
0 28.
На полигоне установлена направляющая 29, по которой перемещаются каретки 30. Приводная станция 31 состоит из приводных устройств 32, двух
5 тросов 33 и 34, связанных с каретками 30, и четырех блоков 35-38. ) Устройство работает следующим образом.
При движении испытываемого трак- ;
0 тора 2 шкив 16 перемещается по до- I полнительному тросу 15.
В момент прохождения трактором 2 точки А скручивание дополнительного троса 15 будет предотвращаться, так
5 как кронштейн 19 имеет возможность вращения в подшипниках 20 относительно стойки 21, а крышка 24 - относительно торца пальца 23, После прохождения трактором 2 точки А УСИQ лие, действующее на шкив 16 со стороны дополнительного троса 15, будет уменьшаться, под действием пружины 9 рулевой привод 1 будет поворачиваться против часовой стрелки,
поворачигвая направляющие колеса
трактора влево. При прохождении трактором определенного расстояния по эллипсной траектории приводная станция по сигналу от блока управления обеспечивает перемещение кареток 30
по направляквдей 29 друг к другу. Приводные устройства 32 начинают врйщаться, перемещая тросы 33 и 34 по блокам 35 - 38, Тросы 33 и 34 приводят в движение каретки 30 с
закрепленн1 1ми на них якорями 13 и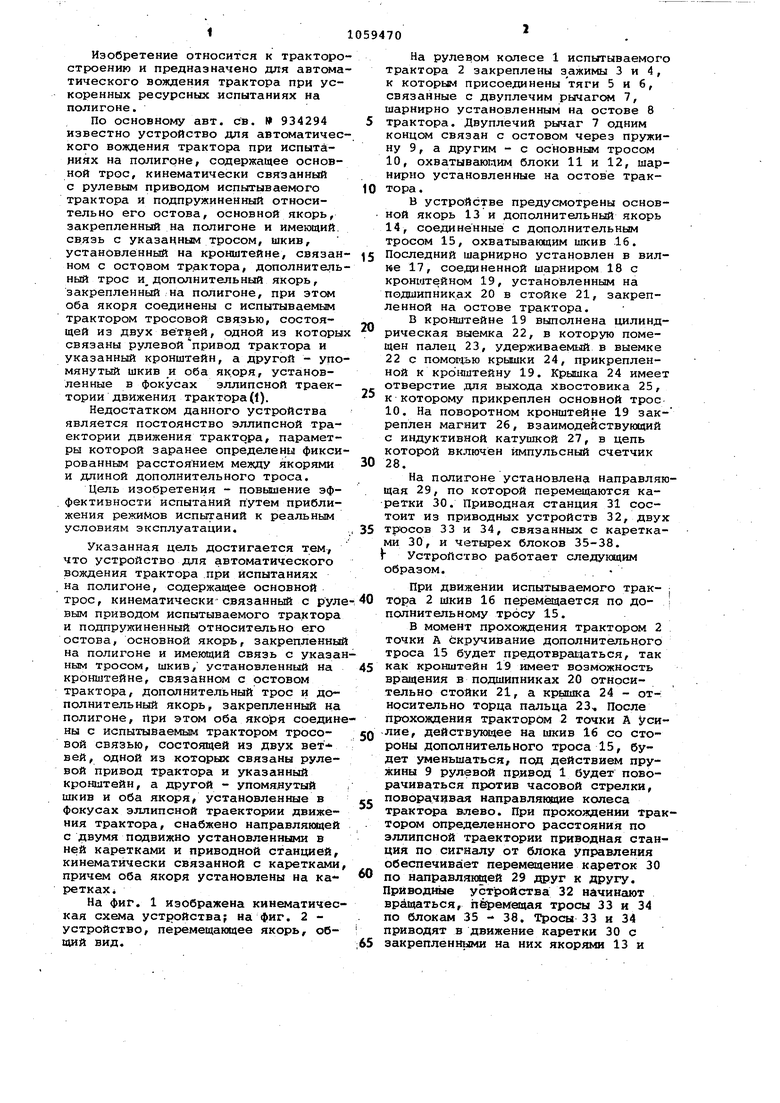
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения трактора при испытаниях на полигоне | 1980 |
|
SU934294A1 |
| Устройство для автоматического вождения трактора при испытаниях на полигоне | 1976 |
|
SU671767A1 |
| Устройство для автоматического вождения тракторов при испытании на треке | 1981 |
|
SU957781A1 |
| Устройство для автоматического вождения мобильных агрегатов при ускоренных испытаниях на надежность | 1980 |
|
SU940671A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРА ПРИ ПОЛИГОННЫХ ИСПЫТАНИЯХ | 1971 |
|
SU312558A1 |
| Устройство для автоматического вождения тракторов при испытаниях на полигоне | 1976 |
|
SU648155A1 |
| Устройство для автоматического вождения трактора по замкнутой кривой | 1974 |
|
SU526305A1 |
| Устройство для ресурсных испытаний тракторов по кольцевой дорожке | 1985 |
|
SU1303876A1 |
| Устройство для автоматического направления движения трактора | 1991 |
|
SU1766291A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРА ПО КРУГУ ПРИ ПОЛИГОННЫХ ИСПЫТАНИЯХ | 1967 |
|
SU202605A1 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРА ПРИ ИСПЫТАНИЯХ НА ПОЛИГОНЕ по авт.Св. 934294-, отличающееся тем, что, с целью повыдения эффективности испытаний путем приближе-. ния режимов испьпаний к рёальнь№4 условиям эксплуатации, оно снабжено направлякедей- с двумя подвижно установленными в ней каретками и приводной станцией, кинематически связанной с каретками, причем оба якоря установлены на каретках. сл со 4 -ч1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматического вождения трактора при испытаниях на полигоне | 1980 |
|
SU934294A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| .. | |||
