И: обретение от}юсится к технике измерения нараглетров процесса р-езат я и может быть . использовано в устройствах auasiTHBHoro упра-влегтия мсталлорейсладих станкоп. Известно устройство япя иэмереь-ия «лирины фрезерования, содержащее да1чик ширины обработки, источник питания и схему обработки сигналов, неподвижное токонепроводящее кольцо со встроенными рабочими контактами к контактами включеиня к сброса, а также счетчик импульсов, запоминающее устройство и ключ, причем рабочие контактьг соединень с одним из полюсов источника питания и входом счетчика имиулъсов, другой вход которого сое динен с контактом сброса, выход счетчика через ключ CBHsair с входом запоминающего уст ройстпа, другие входы ключа иодсое/щнены к контактам включе {ия и сброса, причем деталь соеди тенп с другим полюсом источника тетания, а датчик выполнен в, виде изолированного зуба фрезы, связанного проводником с уп ругим контактом, расположенным на цг 1инделе и изолированным от него 1. О.чнако это устройство измеряет только один параметр резания к не дает ;1нформации о глубине, резания и других параметрах. Кроме того, оно правштьно измеряет ширину фрезерования ири свободном резании, а лля некоторых схем фрезерования результат измерения моясет быть неверным. а контакт изол} рован(юго зуба с деталью будет также влиять налич 1е стружки, СОЖ s-i т.д. Вследствие определен ой ориентацией токонепроводящего кольца с -оабошми контактами и контактами вклю чения и сброса устройство измеряет пгирину фрезерования при обработке только в oiutoM направлении, i Целью изобретения является повьпнение точ ности устройства и надежности его работь, а также расширение области применения. Поставленная uei/ь достигается тем, что в устройство, содержащее зуба фрезы, соедине1 ный через упругий вращающийся контакт с неподвижным токопроводяшим кольцом, расположенным на бабке станка, контакты включения, считывания и сброса, соединенные первыми выводами с ис точником питания и расположенные относительно центра фрезы ка осях, совпал.аю|цих с возможными напрар,ле1гиями iio., а laKже приводы подач, схему управления и схему обработки сигналов, допо..но. внедены .магнит включенн, контактов, расположениь,|й HS шпинделе рСТиво11;)ложИо распо.южению зуба, на котором установлен датчик силы, в качестве контактов исиользпвания герконы, а схема обработки :иг налов выполнена из коммутатора, мг)дк:;юче)пгог(: рабочими входами к вторым йывoдaiv контактов шслшчения, считыва.ния и сброса, мран.чяющим входом - к выходу правления цриводами, | ервь;м выходом параллельно к S-вхо.цам jTByx RS-трр-гггеров, вторым выходом -- пара; лель} о к тине считывания тес;и запоминаллцих устройств, к iieriBOMv элемента ИЛИ и к Н-нходу второго RS-триггера, а третьим выходом -- парал.пельно к пшне пяти интеЕпаторов, причем выход гервого RS-триггера соедипеп через перВЬ1Й итггегратор и первый ключ параллельно с входом irepBoro эапоминаюлюго чсгройсп а и с первыми входами м.ервого и фу.чкциотгальных преобразователей, 1е))вый из которых через первый блок М к же1Шя подключен к входу второго за1тми1гаюп1его устройства, а второй - к пходу т;эетьегс запоминающего )стройства, |;ри этом R- вход первого RS-тритгера соедитю с вь ходом элемента кроме того, схема содержит компаратор и усилитель, входы которы): пара.-1лельно соединень: с токопровод;:щим кольцом, выход компаратора параллельно соеди11ет с вторым входом элемента ИЛИ и через второй интетратор - с вторыми входами первого и второго функциональных 1 реобразователе11, а выход уси.пителя через третий интегратор параллельно соединен с управляющим входом первого ключа, третьим входом второго функционального преобразователя и через последовательно соедагненные второй блок умножения и блок деления - с входогу четвертого запоминаюliiero устройства, цричем выходы приводов . .чодач соединены через вы11рямитс:ли с блоком вьгделения максимального сигнала, сое;шненным гюследовательно с в орым 1:лючом, чет. вертым И ттеграторсф1 и третьим блоком умно жен11я, которьЕЙ цараллельно соединен с входом пятого запоминающего устройства и вторым входом блока деления; кроме того, выход второго RS-триггера параллельно соединен с управляющим входом второго ключа и с пятым интегратором, соединенным с четвертым блоком умножения, который параллельно соединен с входом шестого запоминающего устройства и четвертым входом второго функ ционального преобразователя; схема содержит также блок ввода констант, первый выход которого соединен с вторым входом первого блока умножения, второй выход - с вторым входом второго блока умножения, а третий выход параллельно соединен с вторыми входами третьего и четвертого блоков умножения.
Выходные сигналы шести запоминающих устройств пропорциональны соответственно углу врезания, ширине фрезерования, окружной силе резания, глубине резания, подаче на зуб и углу зубцового шага.
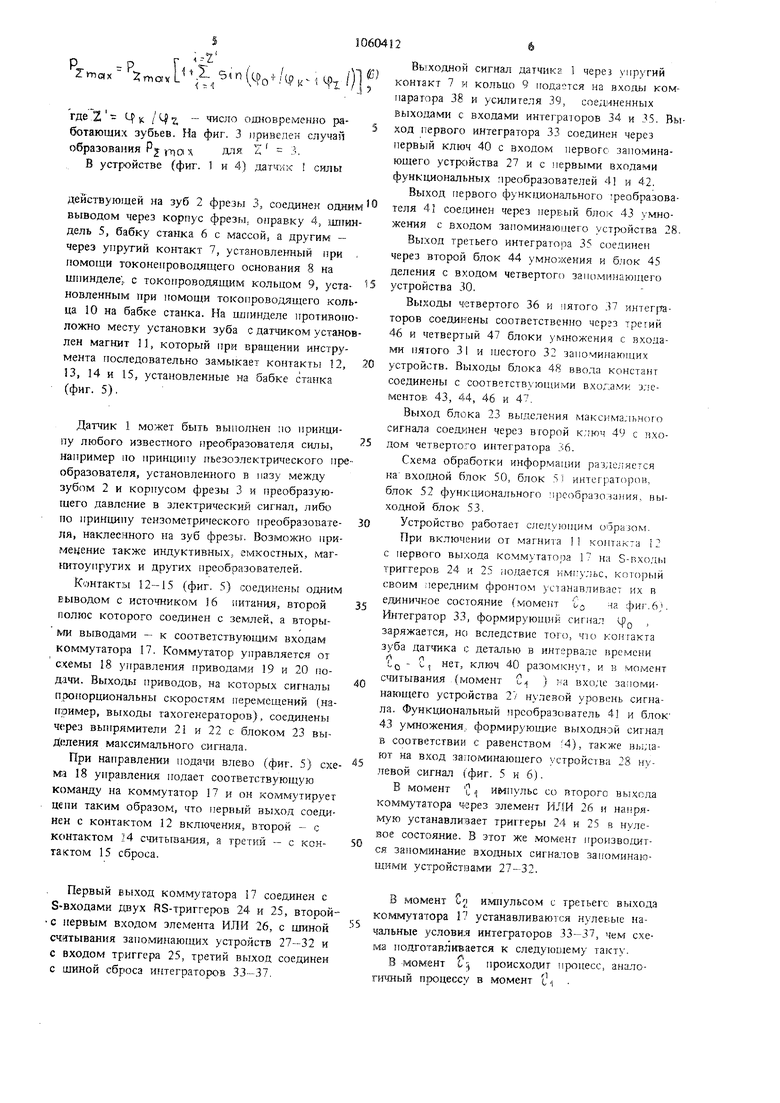
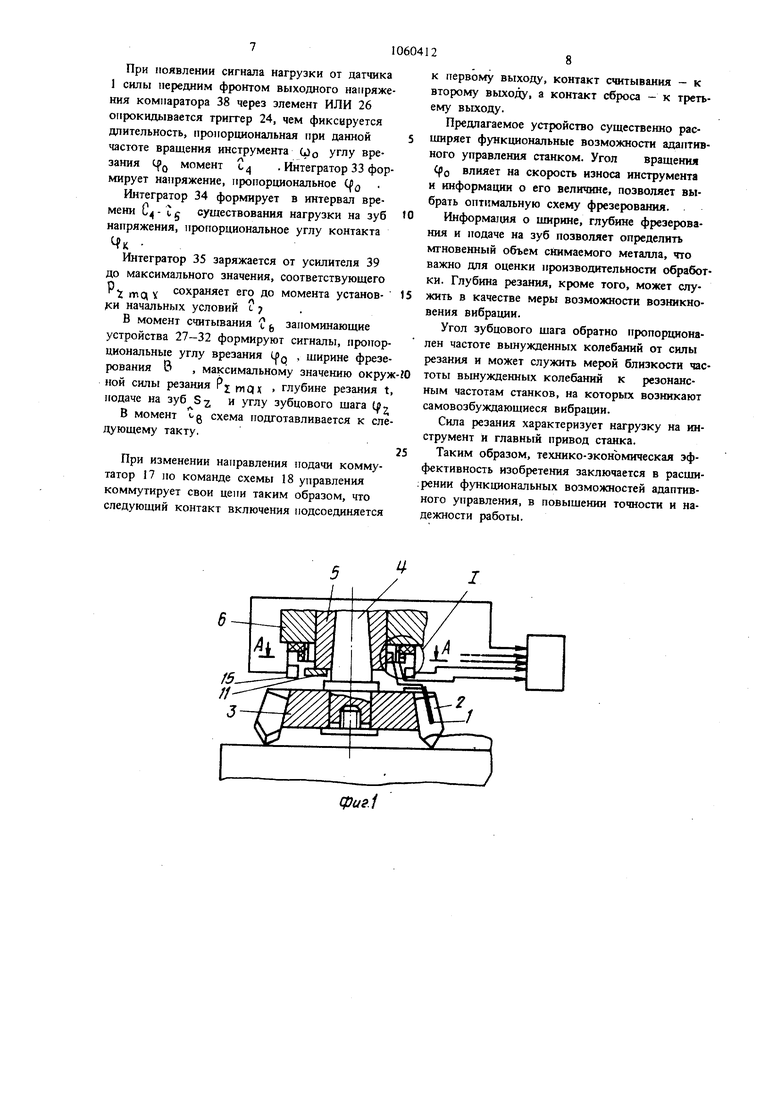
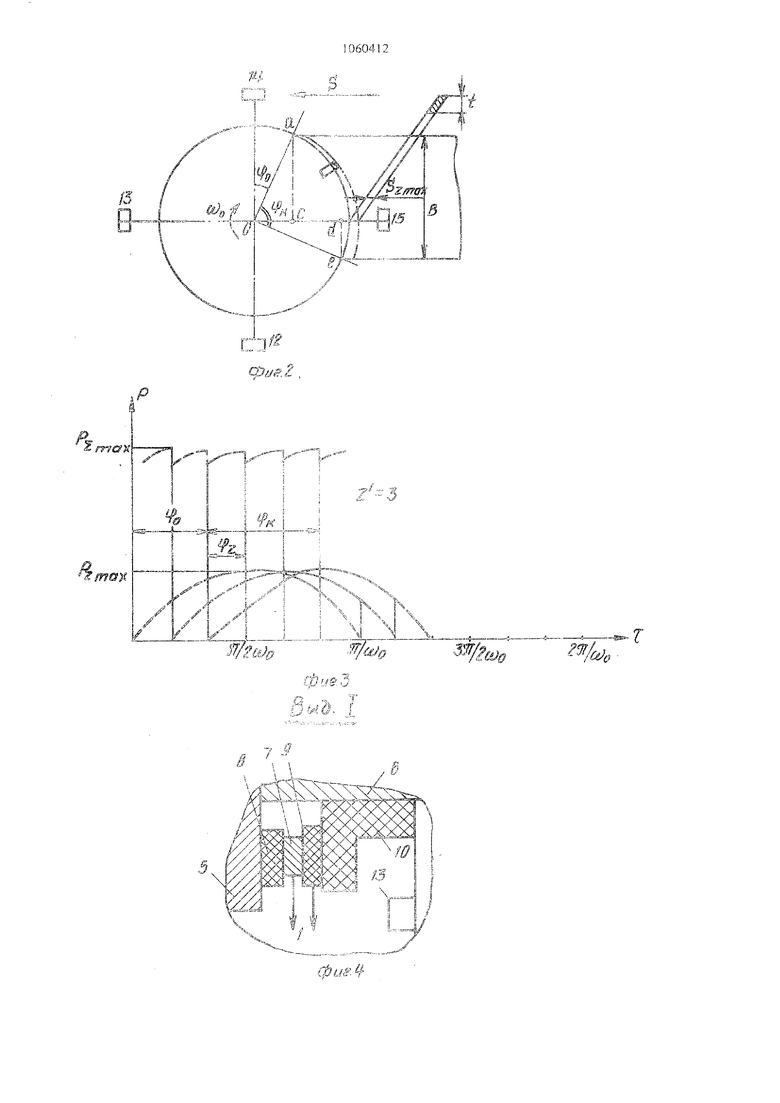
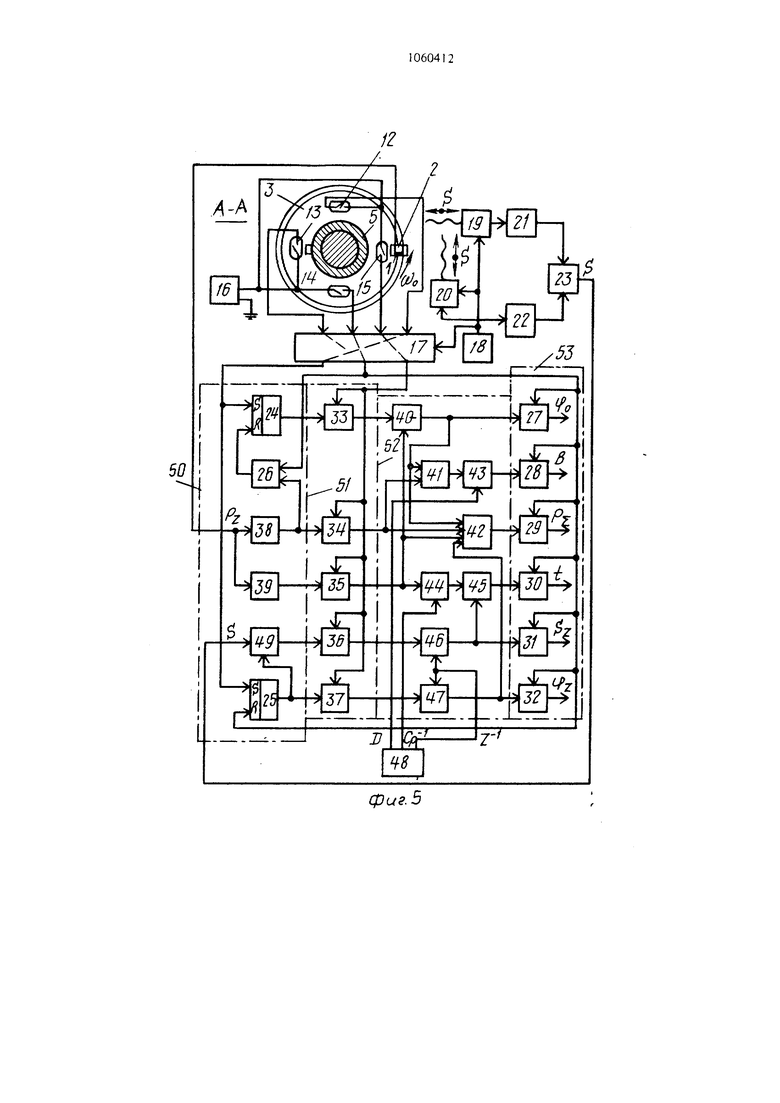
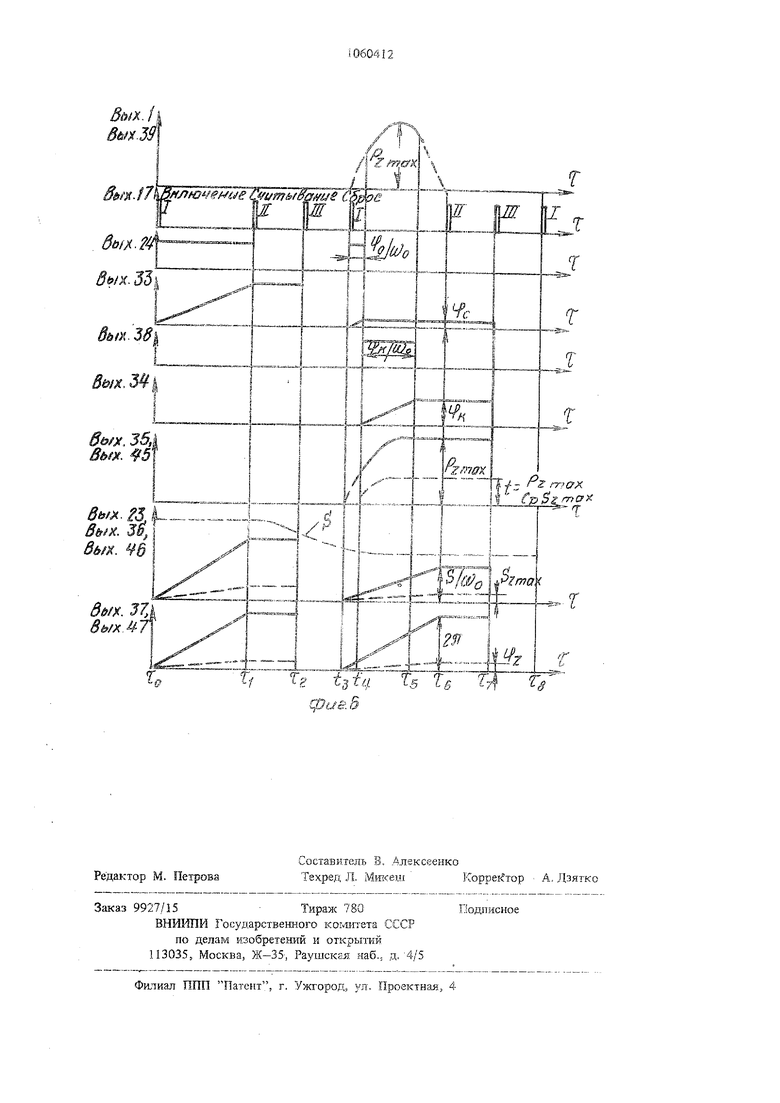
На фиг. 1 приведено устройство, общий вид; на фиг. 2 - схеМа, поясняющая методику измерения угла врезания 1|)д , угла контакта зуба фрезы с деталью (f , глубины резания t, ширины резания Б , подачи на зуб на фиг. 3 - временная диаграмма, поясняющая образование суммарной окружной силы резания Р.,- из .составляющих зубцовых сил Р ; на фиг. 4 - вид 1 на фиг. 1; на фиг. 5 - схема взаимного расположения датчиков и функциональная схема устройства; на фиг. 6 - временные графики работы устройства.
Измерение угла врезания (фиг. 2) основано на преобразовании временного интервала, за который зуб фрезы с угловой скоростью поворачивается на угол УС , в напряжение при помощи инегратора. Начало интервала фиксируется контактом включения, а конец - моментом появления нагрузки на зуб, контролируемой датчиком силы.
Измерение угла контакта зуба с деталью с (фиг. 2) производится повременному интервалу, в течение которого существует нагрузка на зуб.
Измерение глубины резания (фиг. 2) основано на пропорциональности силы резания на зуб сечению среза.
Pz..F.Cp.5,,,,.t, (i)
где Ср - константа материала обрабатываемой депали, материала и геометрии режущей кромки зуба.
10604124
Из (1) cлeдvвт, что
(2)
2,так z,max -Р
Таким образом, измерение глубины резания возможно производить по значению максимальной нагрузки на зуб р гпах максимальной
подачи на зуб 5z max
Измерение Р max, осуществляется при помощи специального интегратора с малой постоянной времени заряда и с большой постоянной времени разряда.
Измерение подачи на зуб основано на равенстве
5 306
, (3)
,- - Vu)oZ
20
Iмм
где S - минутная подача,;
мин
об
f U),, - частота вращения фрезы,. и
мин
рад
с
Z - число зубьев фрезы.
Время одного оборота фрезы обратно пропорционально Пд . Если значение минутной подачи S интегрировать в течение этого времени, то результат интегрирования будет пропорционален значению S/PO - Умножив зто значение
на Z, , 1галуч)м Время одного оборота (возможно также измере1ше времени половины оборота путем выбора соответствующей постоянной интегрирования) контролируется при помощи контактов включения и
сброса.
Ширина фрезерования (фиг. 2) определяется уравнением
B Qc de ftost.-cos/c o + tfKll
45
где D - диаметр фрезы.
Измерение угла зубцорого шага С; производится измерением интервала времени полупериода вращения фрезы при помощи интегратора и делением результата интегрирования на Z/2:
2
7 /3)
55
Измерение макси%1ального зпачснпя суммарной окружной силы рсззппя (фиг. 3) основано на равенстве Р-Р %(Ш п. Sinicp.t: Zmax1Л о Фк-1где,2- Ч к число одаювременно работающих зубьев. На фиг. 3 приведен случай образования Pj }-г)С« X Для Z 3, В устройстве (фиг. 1 и 4) датчик сю1ы действующей на зуб 2 фрезы 3, соединен одни выводом через корпус фрезы, оправку 4, шни дель 5, бабку станка 6 с массой, а другим - через упругий контакт 7, устзловле тый при помощи токоненроводящего основания 8 на шпинделе,, с токопроводящим кольцом 9, уста новлеиным при комощи токопроводящего кол ца 10 на бабке станка. На шпинделе противоп ложно месту установки зуба с датчиком устано лен магнит II, который при вращении инструмента последовательно замыкает контакты 12, 13, 14 и 15, установленные на бабке станка (фиг. 5). Датчик 1 может быть выполнен по принципу любого известного преобразователя силы, например по принципу пьезоэлектрического пр образователя, установленного в пазу между 2 и корпусом фрезы 3 и преобразующего давление в электрический сигнал, либо по принципу тензометри геского преобразователя, наклеенного на зуб фрезы-. Возможно 1 рир/1еыение также индуктивных, емкостных, магШ1тоупругих и других 1реобраэовате.пей. {Слнтакты 12-15 (фиг. 5) соединены одним выводом с источником 16 питания, второй полюс которого соединен с землей, а вторы ш вывода1Уш - к соответствующим входам коммутатора 17. Коммутатор управляется от схемы 18 управления приводами 19 и 20 подачи. Выходы приводов, на которых сигналы проиорциональнь скоростям перемещений (наггример, выходы гахогенераторов), соединены через выпрямители 21 и 22 с блоком 23 выделения максимального сигнала. При направлении подачи влево (фиг. 5) схе ыл 18 управления подает соответствующую команду на коммутатор 17 и он коммутирует таким образом, что первый выход соединен с контактом 12 включения, второй - с контактом 34 считывания, а третий - с контактом 15 сброса. Первый вы.ход коммутатора 17 соединен с S-входами даух RS-триггеров 24 и 25, второй с первым входом элемента И.ПИ 26, с шиной считывания запоминающих устройств 27-32 и с входом триггера 25, третий выход соединен с шиной сброса интеграторов 33-37. Въходной сигнал датчика 1 через упругий контакт 7 и кольцо 9 1годагтся на входы компаратора 38 и усилителя 39, соединенных выходами с входами интеграторов 34 и .35. Выход первого интегратора 33 соединен через первый ключ 40 с входом первогс запоминающего уст}Х)йства 27 и с первыми входами функциональных преобразователей 41 и 42. Выход первого функвдонального реобразователя 41 соединен через первый блок 43 умножения с входом эапоминаюипего устройства 28. Вы.чод третьего интегратора 35 соез, через второй блок 44 умно/хания и блок 45 деления с входом четвертого запомипаюп1его устройства 30. Выходы четвертого 36 и пятого 37 интеграторов соединены соответственно через третий 46 и четвертый 47 блоки умножения с входами пятого 31 и шестого 32 запоминающих устройств. Выходь блока 48 ввода констант соединены с соответствующими вхо;-;ами злементоЕ 43, 44, 46 и 47. Выход блока 23 выделения макспмального сигнала соединен через второй к:;юч 49 с пходом четвертого интегратора 36. Схема обработки информации разделяется на входаой блок 50, блок 51 иитеграторон, б.пок 52 функционального :1реобразо:1а)1ия, выходной блок 53. Устройство работает следуклпим образом. При включении от магнита 11 контакта 12 с первого выхода коммутатора 17 на S-п.хояы триггеров 24 и 25 подается , который своим передним фронтом устанавливает pix в единичное состояние (MOMeiiT u ча фиг.6;. Интегратор 33, формирующ.чй сигнал Ц1 , заряжается, H-CI вследствие того, что Koi-. зуба датчика с деталью в интгрвале прсмсии CQ - и, нет, ключ 40 разомкн т, и в момент С1штывания (момент С } входе запоминающего устройства 27 нулевой сигнала. Функциональный преобразователь 4 и блок 43 умножения., формирующие выходной сигнал в соответствии с равенством 4), также на вход запоминающего устройства 28 нулевой сигнат (фиг. 5 и 6). В момент 1 g импульс со второго выхола коммзтатора через элемент ИЛИ 26 и напрямую устанавливает триггеры 24 и 25 в нулевое состояние. В этот же .момент производится запоминание входных сигна.лов запоминающими устройствами 27-32. В момент импульсом с третьего вьгхода коммутатора 17 устанавливаются нулеЕ ые начальные условие интеграторов 33-37, чем схема подготавливается к следующему . В момент 63 происходит прюпесс, аналогичный процессу в момент i При появлении сигнала нагрузки от датчика 1 силы передним фрюнтом выходного напряжения компаратора 38 через элемент ИЛИ 26 опрокидывается триггер 24, чем фиксируется длительность, пропорциональная при данной частоте вращения инструмента фо углу врезания (Q момент С 4 . Интегратор 33 формирует напряжение, пропорциональное (|) Интегратор 34 формирует в интервал времени С - 1с существования нагрузки на зуб напряжения, пропорциональное углу контакта fK Интегратор 35 заряжается от усилителя 39 до максимального значения, соответствующего PV и.,г, V сохраняет его до момента установ m а V сохраняет его до |си начальных условий су. В момент считывания f, запоминающие устройства 27-32 формируют сигналы, пропорциональные углу врезания (Q , ширине фрезерования В , максимальному значению окруж ной силы резания Pj mqx глубине резания t подаче на и углу зубцового шага Ц| В момент i-g схема подготавливается к сле дующему такту. При изменении направления подачи коммутатор 17 по команде схемы 18 утфавления коммутирует свои цепи таким образом, что следующий контакт включения подсоединяется к первому выходу, контакт считывания - к второму выходу, а контакт сброса - к третьему выходу. Предлагаемое устройство существенно расширяет функциональные возможности адаптивного управления станком. Угол вращения Сро влияет на скорость износа инструмента и информации о его величине, позволяет выбрать оптимальную схему фрезерования. Информация о цшрине, глубине фрезерования и подаче на зуб позволяет определить мгновенный объем снимаемого металла, что важно для оценки производительности обработки. Глубина резания, кроме того, может служить в качестве меры возможности возникновения вибрации. Угол зубцового шага обратно пропорционален частоте вынужденных колебаний от силы резания и может служить мерой близкости частоты вьшужденных колебаний к резонансным частотам станков, на которых возникают самовозбуждающиеся вибрации. Сила резания характеризует нагрузку на инструмент и главный привод станка. Таким образом, технико-зкономическая эффективность изобретения заключается в расщирении функциональных возможностей адаптивного управления, в повышенин точности и надежности работы.

| название | год | авторы | номер документа |
|---|---|---|---|
| Аналого-цифровой преобразователь интегральных характеристик напряжений | 1988 |
|
SU1615888A1 |
| Режекторный фильтр | 1987 |
|
SU1429293A2 |
| Устройство для определения режимов резьбошлифования | 1986 |
|
SU1386960A2 |
| Устройство для измерения ширины фрезерования | 1976 |
|
SU599961A1 |
| Устройство для автоматического контроля нагрева горных машин | 1991 |
|
SU1758242A1 |
| Устройство для моделирования вентильного электродвигателя | 1988 |
|
SU1596357A1 |
| Копировальное следящее устройство для станков с программным управлением | 1982 |
|
SU1070508A1 |
| Время-импульсное устройство дляуМНОжЕНия | 1979 |
|
SU847329A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ПОИСКА КАНАЛОВ РАДИОСВЯЗИ | 2011 |
|
RU2450447C1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПАРАЗИТНЫХ ИМПУЛЬСНЫХ ВОЗМУЩЕНИЙ В СЕТЯХ ЭЛЕКТРОПИТАНИЯ С ПЕРЕМЕННЫМ НАПРЯЖЕНИЕМ | 2002 |
|
RU2239201C2 |
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГЛУБИНЫ И ШИРИНЫ ФРЕЗЕРОВАНИЯ, содержащее датчик силы резания зуба фрезы, соединенный через упругий вращающийся контакт с неподвижным токопроводящим кольцом, расположенным на бабке станка, контакты включения, считывания и сброса, соединенные первыми выводами с источником питания и расположенные относительно центра фрезы на осях, совпадающих с возможнь1ми направлениями подачи, а также приводы подач, схему управления и схему обработки сигналов, отличающееся тем, что, с целью расщирения технологических возможностей, повыщения точности и надежности работы устройства, в него введены магнит включения контактов, расположенный на шпинделе противоположно расположению зуба, на котором установлен датчик силы, в качестве контактов использованы герконы, а схема обработки сигналов выполнена из коммутатора, подключенного рабочими входами к вторым выводам контактов включения, считывания и сброса, управляющим входом - к выходу схемы управления приводами, первым выходом - параллельно к S- входам двух RS-триггеров, вторым выходом параллельно к шине считывания шести запоминающих устройств, к первому входу элемента ИЛИ и к R-входу второго RS-триггера, а третьим выходом - параллельно к шине сброса пяти интеграторов, причем выход первого RS-триггера соединен через первый интегратор и первый ключ параллельно с входом первого запоминающего устройства и с первыми входами первого и второго функциональных преобразователей, первый из которых через первый блок умножения подключен к входу второго запоминающего устройства, а второй подключен к входу третьего запоминающего устройства, при этом R-вход первого RS-триггера соединен с выходом элемента ИЛИ, кроме того, схема содержит компаратор и усилитель, входы которых параллельно соединены с токопроводящим кольцом, выход компаратора параллельно соединен с вторым входом элемента ИЛИ и через второй интегратор - с вторыми входами первого и (Л второго функциональных преобразователей, а выход усилителя через третий интегратор параллельно соединен с управляющим входом первого ключа, третьим входом второго функционального преобразователя и через последовательно .соединенные второй блок умножения и блок деления с входом четвертого запоминающего устройства, причем выходы приводов подач соединены через вьпфямители с блоком вьщеления максимального сигнала, соединенным последовательно с вторым ключом, четвертым интегратором и третьим блоком умножения, который параллельно соединен с входом пятого запоминающего устройства и вторым входом блока деления; кроме того, выход второго RS-триггера параллельно соединен с управляю щим входом второго ключа и с пятым интегратором, оедине шым с четвертым блоком умножения, которьп параллельно соединен с входом шестого запоминающего устройства и четвертым входом второго функционального преобразователя; схема содержит также блок ввода констант, первый выход которого соединен с вторым входом первого блока ум
Фае. I
ZrrfGV
.,J
7 f
may.
-r
/(O
фиг. 5 Вых. /I Вш.ж вы.24 Вьт- J3| Вьп Зв Вш. вш, 55, Выж. 5 Вш-Щ ВЬ1К. Jf Вш. V6 Q&i. вьтЛ-П г t.fii
Сриё.В /- Рг fTjax .T.ax
| I | |||
| Устройство для измерения ширины фрезерования | 1976 |
|
SU599961A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
