Изобретение относится к робототехнике и может быть использовано п выполнении различных технологически операций. По основному авт.св. № 992181 известен схваж манипулятора, содерж щий сочлененные с ладонью и связанные с приводом орновные пальцы, соб ранные из звеньевг причем каждый па лец снабжен тросом и прз жинящим эле ментом, а также по меньшей мерэ одн дополнительную пару пальцев, подвиж ную опору, дополнительный привод и опоры качения, размещенные на каждо звене основных пальцев и на ладони И/ : Недостатком известного схвата является то, что он не может быть использован в тех случаях, когда к поверхности захватываемого изделия необходимо подать технологический агент (сож, йасло, воздух и т.д т.е. у него узкие технологические возможности. Цель изобретения - расширение технологических возможностей за сче подачи технологического агента к по верхности изделия. Поставленная цель достигается тем, что схват манипулятора снабжен источниками технологического агента установленными на ладони, и ишангами, расположенными вдоль боковых поверхностей звеньев пальцев, приче шланги связаны с этими источниками, а в каждом звене пальца выполнены каналы, соединенные герметично со шланга1«1и и выходящие на рабочую поверхность звеньев. , На фиг.1 схематически изображен схват манипулятора, общий вид; на фиг.2 - отдельное звено пальца} на фиг.З - разрез А-А на фиг.2; на фиг.4 - вид Б на фиг.2/ на фиг.5 г ерметичноё соединение шланга с отверстием эвена. Схват манипулятора содержит ладонь 1 и пальцы, составленные из звеньев 2. На поверхностях ладони 1 и звеньев 2 установлены соответственно тела качения 3 и 4. Каждое звено 2 имеет направляющую 5 и отверстие 6, через которое пропущен трос 7, а также имеет фасонные поверхности 8 и 9, вдоль которых выпо нены выступ 10 и впадина 11. При составлении пальца звенья 2 установлены своими направляющими 5 на пружинящем элементе 12, а выступ . 10 звена входит во впадину 11 соседнего звена. В каждом звене 2 выполнено глухое отверстие 13, расположенное поперек пальца и отверстия 14. Последние сообщаются с глухим отверстием 13 и выходят в звено 2 на рабочую поверхность 15, контактирующую с изделием 16. Каждый палец схвата снабжен шлангом 17, связанным с источником 18 технологического агента и с глухими отверстиями 13 звеньев 2 пальца. Трос 7 имеет у одного конца упор 19, а другой его конец связан с приводом 20. Шланг 17 устанавливается вдоль каждого пальца, касаясь боковых поверхностей звеньев 2, и удерживается в этом положении за счет связи 1иланга 17 со звеньями 2 посредством ответвлений 21 шланга 17, присоединенных одним концом к шлангу 17 и надетых на штуцера 22 с фиксацией хомутиками 23. Устройство работает следующим образом. Скват подается на загрузочную позицию до соприкосновения ладони 1 с изделием 16. Включается привод 20 и звенья 2 пальцев, перекатываясь по фасонным поверхностям 8 и 9, обхватывают изделие 16.(Когда усилие схвата достигает расчетной величины привод 20 выключается. Изделие 16 подается схватом на рабочую позицию. Включается источник 18 технологического агента и в зону обработки по шлангу 17 подается необходимый технологический агент (масло, сож, воздух, вакуум и т.п.) . После завершения операции источник 18 технологического агента выключается, схват подает изделие на позицию Разгрузка, после чего приводом 20 отпускается трос 7, изделие 16 удаляется, а схват передается на позицию Загрузка. Далее цикл повторяется. Предлагаемый захват имеет преимущество перед известным, так как он позволяет подвести к поверхности изделия необходимую среду (смазку, сож, воздух, вакуум и т.п.} что расширяет его технологические возможности.
is
Btf/8
АЛ
qju9.S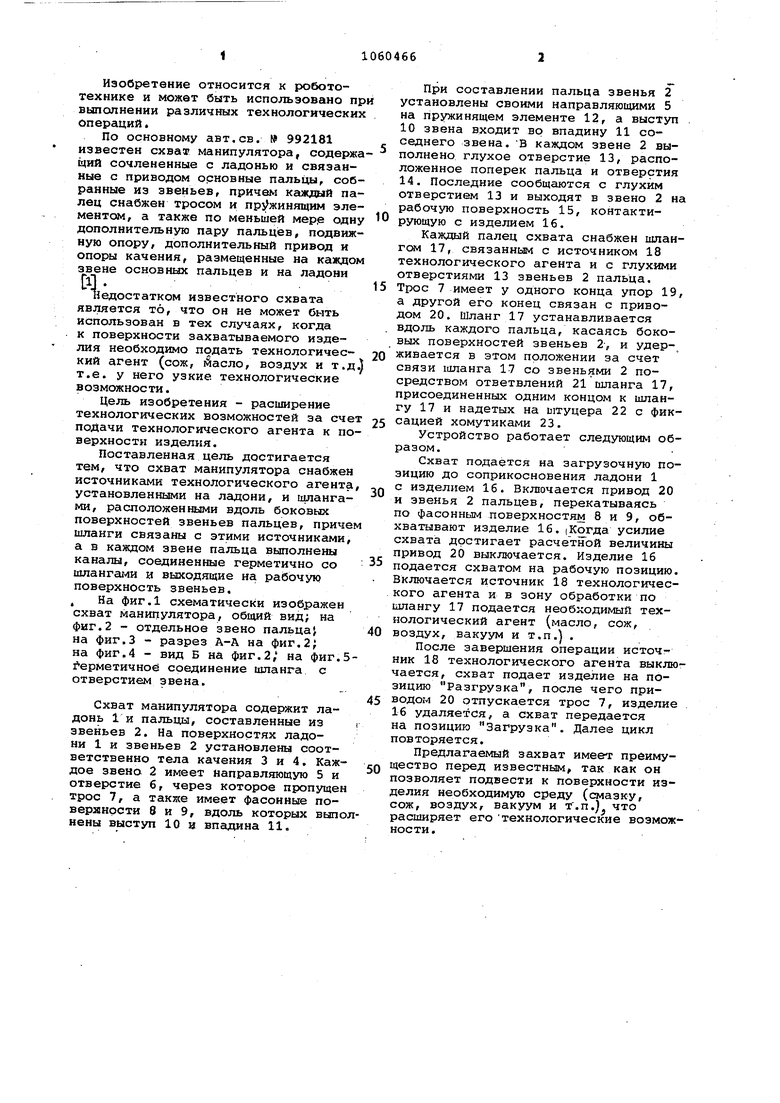
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1981 |
|
SU992181A2 |
| Захват манипулятора | 1982 |
|
SU1066800A2 |
| Захват манипулятора | 1980 |
|
SU931465A2 |
| Захват манипулятора | 1978 |
|
SU724337A1 |
| Захват манипулятора | 1985 |
|
SU1288057A1 |
| Захват манипулятора | 1982 |
|
SU1034897A2 |
| Захват манипулятора | 1983 |
|
SU1191284A1 |
| Захватный комплекс | 1988 |
|
SU1684024A1 |
| Схват манипулятора | 1984 |
|
SU1202874A2 |
| Манипулятор | 1982 |
|
SU1065185A1 |
СХВАТ Г АНИПУЛЯТОРА по ; авт.св. № 992181, отличаю--K«i- j,..J, ,щ и и с я тем, что., с целью расширения технологических возможностей, за счет подачи технологического iагента к поверхности изделия, он снабжен источниками технологического агента, установленными на ладони, и шлангами, расположенного вдоль боковых поверхностей звеньев пальцев, причем шланги связаны с этими источниками, a в каждом звене пальца выполнены каналы, соединенные герметично со шлангами и выходящие на рабочую поверхность звеньев.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Схват манипулятора | 1981 |
|
SU992181A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
