1 .1
Изобретение относится к машиностроению, в частности к захватам манипуляторов и промышленных роботов
Цель изобретения - расширение .технологических возможностей захвата, манипулятора за счет увеличения степени свободы перемещения звеньев пальцев относительно друг друга.
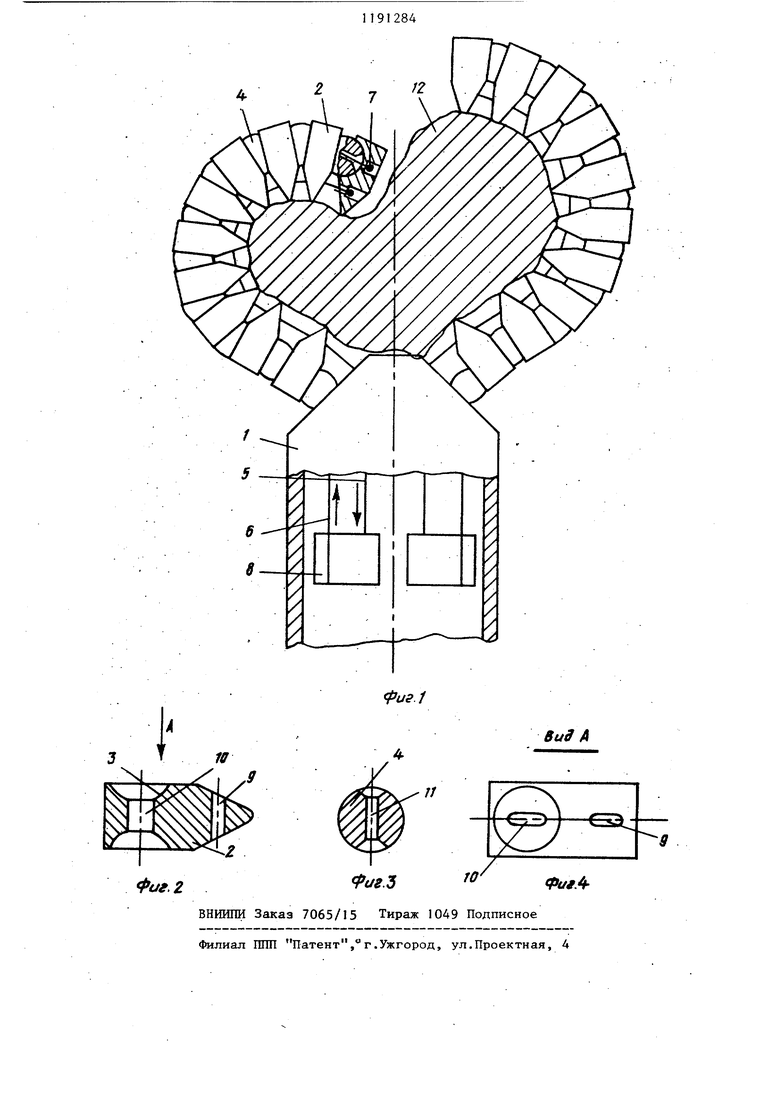
На фиг.1 изображен захват манипулятора;- на фиг. 2 - звено пальца захвата манипулятора; на фиг.З шарик направляющей; на фиг. 4 - вид А на фиг.2.
Захват манипулятора содержит сочлененные с ладонью 1 пальцы, каждый из которых собран из отдельных звеньев 2, на фасонных поверхностях которых выполнены вогнутые сферические поверхности 3 под .шарики 4 направляющей, с помощью основного зажимного троса 5 и дополнительного троса 6. При этом группа шариков 4 и дополнительный трос 6 образуют .направляющую.
Концы основного зажимного троса 5 и дополнительного троса 6 .для каждого пальца с одной стороны заканчиваются упорами 7, а с другой соединены с приводом 8, причем намотка тросов на барабан привода 8 осуществляется в противоположном направлении. Каждое звено 2 имеет отверстие 9, смещенное относительно геометрического центра звена, через которое про842
ходит основной зажимной трос 5, а также отверстие 10. Шарик направляющей имеет центральное отверстие 11. Через отверстие 10 звеньев и отверстия 11 щариков пропущен дополнительный трос 6. Каждая пара основного зажимного троса и дополнительного троса пальцев.имеет самостоятельный привод 8.
Захват манипулятора работает следующим образом.
Включается привод 8, который натягивает основной зажимной трос 5 и отпускает дополнительный трос 6, звенья 2 перекатьшаются по сферическим поверхностям шариков 4 направляющей до тех пор, пока каждое звено . не войдет в контакт с деталью 12, происходит захват детали. После перемещения детали в нужную позицию включается привод 8, который отпускает основной зажимной трос 5 и натягивает дополнительный трос 6, освобождая деталь 12 и возвращая звенья 2 в исходное положение.
Аналогично работает другой палец захвата. Если деталь расположена не по центру и не может сдвинуться в сторону, то один палец захвата, войдя в соприкосновение с ней,.останавливается, а другой палец благодаря самостоятельному приводу подтягиваетЬя до упора с деталью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1982 |
|
SU1060466A2 |
| Схват манипулятора | 1981 |
|
SU992181A2 |
| Захват манипулятора | 1982 |
|
SU1066800A2 |
| Захват манипулятора | 1978 |
|
SU724337A1 |
| Захват манипулятора | 1979 |
|
SU910410A2 |
| Захват манипулятора | 1980 |
|
SU931465A2 |
| Захват манипулятора | 1983 |
|
SU1133086A2 |
| Захват манипулятора | 1982 |
|
SU1034897A2 |
| Захват манипулятора | 1985 |
|
SU1288057A1 |
| ЗАХВАТ | 2014 |
|
RU2570597C1 |
ЗАХВАТ МАНИПУЛЯТОРА, содержащий сочлененные с ладонью приводные пальцы, собранные из звеньев, выполненных с фасонными поверхностями и с отверстиями и установленных на направляющей с возможностью перемещения вдоль нее, и основные зажнмные тросы, проходящие через отверстия в звеньях, смещенные относительно их геометрического центра в сторону, противоположную направляющей, отличающийс я тем, что, с целью расширения технологических возможностей за счет, увеличения подвижности звеньев, направляющая выполнена в виде группы шариков и дополнительного троса, проходящего через сквозные отверстия в центре шариков, а на фасонных поверхностях звеньев выполнены вогнутые сферические поверхности под шарики направляющей, причем основной зажимной и дополнительный тросы (Л каждого пальца связаны с самостоятельным приводом.