Изобретение относится к робототехнике и может быть использовано пр создании дистанционных манипуляторов По основному авт.св. 1 582960 известно устройство для управления дистанционным манипулятором, содержа щее последовательно соединенные элек тропривод, упругий элемент и датчик момента, датчик угла задающего органа, последовательно соединенные первый сумматор, усилитель, электрогидроусилитель, гидропривод и датчик давления, выход которого подключен к первому входу первого сумматора, а такжег последовательно соединенные датчик угла исполнительного органа и второй сумматор, выход которого чере последовательно соединенные электропривод и датчик угла задающего органа подключен к второму входу второго сумматора, второй выход гидропривода соединен с входом датчика угла исполнительного органа, а выход датчика момента подключен к второму входу первого сумматора Cl 3Это устройство позволяет выполнять рабочие операции с объектами, на движение которых наложены внешние механи ческие связи, без заклинивания исполнительного органа и поломки объекта, Однако вьшолнение операций со свободными объектами, целью которых являетс транспортировка и удержание этих объектов в желаемых точках обслуживае мой исполнительным органом зон, затруднено постоянно присутствующими значительными физическими нагрузками на оператора, связанными с наличием противодействующих оператору моментов развиваемых задающим органом и обус- ловленных массой этих объектов. Целью изобретения является расширение функциональных возможностей путем снижения физических нагрузок . на оператора. Поставленная цель достигается тем, что в устройство содержащее последовательно соединенные электропривод, упругий элемент и датчик момента, датчик угла задающего органа, последовательно соединенные первый сумматор, усилителе, электрогидроусилитель, гидропривод и датчик давления, выход которого подключен к первому входу первого сумматора, а также последовательно соединенные датчик угла исполнительного органа и второй сумматор,, выход которого через последовательно соединенные электропривод и датчик угла задающего органа подключен к второму входу второго сумматора, второй выход гидропривода соединен с входом датчика угла исполнительного органа, а выход датчика момента подключен к второму входу первого сумматора, введены последовательно соединенные первый нелинейный блок, дифференциатор, второй нелинейный блок, блок выборки и хранения и блок умножения, через который выход датчика давления подключен к первому входу первого сумматора, а вход первого нелинейного блока соединен с выходом датчика давления. На чертеже представлена функциональная схема устройства. Устройство содержит упругий эле- мент 1, датчик 2 момента, первый сумматор 3, усилитель 4, электрогидроусилитель 5, гидропривод 6, датчик 7 угла исполнительного органа, второй сумматор 8, электропривод 9, оператор 10, первый нелинейный, блок 11, дифференциатор 12, второй нелинейный блок 13, блок 14 выборки и хранения, блок 15 умножения, датчик 16 давления, датчик 17 угла задающего органа, нагрузку 18. Устройство работает следующим образом. Работа устройства основана на различии величин.скорости изменения, моментов при вьтолнении манипулятором операций с объектами, имеющими внешние механические связи, и с объектами без этих связей. Так при работе со свободными объектами максимальная величина ( -- ).j.((скорости изменения момента, действующего на гидропривод 6) не превышает значения TfUn-m li СГ. (1) вдё максимальное значение угловой скорости выходного вала гидропривода 6; 1 - длина i-ro звена; ptTto(x грузоподъемность манипулятора. Выполнение операций с объектами, имеющими внешнюю механическую связь,, сопровождается резкими изменениями момента М. . Значения скорости изменения момента Mf-рИ его сигналааналога с датчика 16 давления пропорциональны жесткости механической связи и жесткости механической харак
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1112341A2 |
| Устройство для управления дистанционным манипулятором | 1978 |
|
SU737917A2 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU883862A2 |
| Устройство для управления дистанционным манипулятором | 1984 |
|
SU1168895A2 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU950519A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1061987A2 |
| Устройство для управления дистанционным манипулятором | 1977 |
|
SU639699A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1033308A2 |
| Устройство для управления дистанционным манипулятором | 1988 |
|
SU1650428A2 |
| Устройство для управления дистанционным манипулятором | 1985 |
|
SU1313692A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ даСТАНЦИОННЫМ МАНИПУЛЯТОРОМ по авт. св. № 582960, отличающееся тем, что, с целью расширения функциональных возможностей путем снижения физических нагрузок на оператора, оно содержит последовательно соединенные первьй нелинейный блок, дифференциатор, второй нелинейный блок, блок выборки и хранения и блок умножения, через который выход датчика давления подключен к первому входу первого сумматора, a вход первого нелинейного блока соединен с выходом датчика давления. (Л со ел to со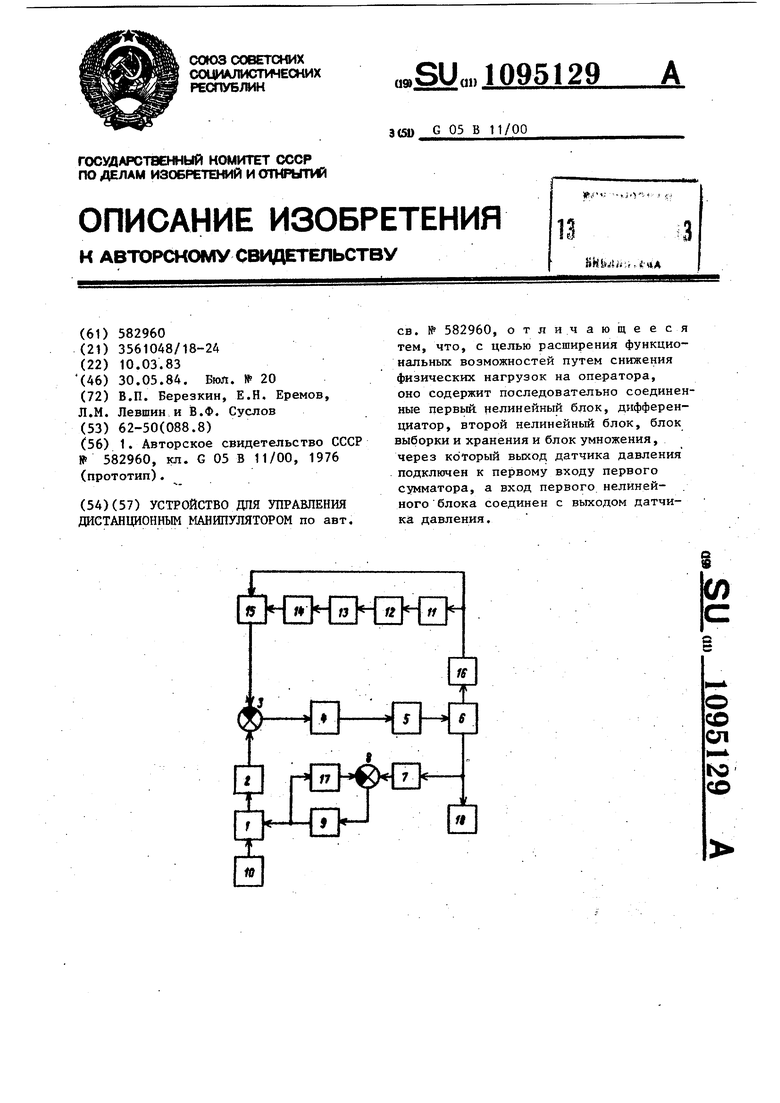
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для управления дистанционным манипулятором | 1976 |
|
SU582960A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
