Изобретение относится к робототехнике и может быть использовано при создании очувствленных дистанционных копирующих манипуляторов. По основному авт. св. № 582960 известно устройство для управления дистанционным маш пулятором, содержащее последовательно соединенные электропривод, упругий элемент и датчик момента, датчик угла задающего органа, последовательно соединенные первый сумматор, усилитель, гидропривод и датчик давления, выход которого подключен к входу первого сумматора, а также последовательно соединенные датчик для исполнительного органа и второй сумматор, выход которого через последовательно соединенные электропривод и датчик угла задающего органа подключен к второму входу второго сумматора, второй выход гидропривода соединен с входом датчика угла исполнительного органа, а выход датчика момента подключен к второму вхояу первого сумматора. Недостатко.м этого устройства является нестабильность статических характеристик очувствления и динамических характеристик гидропривода. Это обусловлено тем, что передаточный коэффициент контура гидропривода (его добротность по скорости) нелинейно зависит от момента, действующего со стороны нагрузки исполнительного органа. При отсутствии момента нагрузки передаточный коэффициент гидропривода по скорости максимален, а по, мере увеличения момента нагрузки он уменьшается и в пределе становится равным нулю, что приводит к значительному увеличению ошибки очувствления. Изменение этого коэффициента изменяет и динамические характеристики, в частности, изменяет колебательность переходных процессов в контуре гидропривода, замыкаемого по координате перепада давления. Целью изобретения является повышение точности и улучшение динамических характеристик устройства. Поставленная цель достигается тем, что в устройство введены последовательно соединенные нелинейный блок и блок умно„жения, через который выход первого сумматора подключен к входу усилителя, а вход нелинейного блока соединен с выходом датчика давления. На чертеже представлена функциональная схема предлагаемого устройства. Устройство содержит усилитель 1, гидропривод 2, датчик 3 угла исполнительного органа, первый сумматор 4, электропривод 5, упругий элемент 6, датчик 7 момента. второй сумматор8, датчик 9 давления, датчик 10 задающего органа, оператор II, исполнительный орган 12, нелинейный блок 13, блок 14 умножения. Устройство работает следующим образом. Перемещая задающий орган по желаемой траектории оператор II воздействует на упругий Элемент 6. Датчик 7 момента замеряет деформацию упругого элемента 6, т.е. вырабатывает сигнал, пропорциональный силовому воздействию оператора 11. Этот сигнал поступает на первый вход первого сумматора 4, а на второй вход сумматора 4 с датчика 9 давления поступает сигнал, пропорциональный силовому взаимодействию исполнительного органа 12 и его нагрузки. Разностный сигнал с выхода первого сумматора 4 подается через блок 14 умножения и электронный усилитель I на вход гидропривода 2. Под действием этого сигнала исполнительный орган 12 перемещается по задаваемой оператором 11 траектории. Электропривод 5 осуществляет слежение задающего органа за исполнительным органом 12 под действием разностного сигнала, снимаемого сумматора с второго сум.матора 8, пропорционального разности yivioBbix положений выходных валов гидропривода 2 и электропривода 5. Назначение блока 14 умножения - стабилизировать коэффициент передачи гидропривода 2 с использованием информации о моменте нагрузки гидропривода 2, снимаемой с датчика 9 давления. Так, при увеличении момента нагрузки на гидропривод 2 увеличивается сигнал с выхода датчика 9 давления. Этот сигнал, проходя через нелинейный блок 13, увеличивает коэффициент передачи блока 14 умножения по второму входу для того, чтобы не допустить уменьшения общего передаточного коэффициента из-за уменьшения коэффициента передачи гидропривода 2. Нелинейный блок 13 имеет следующую зависимость выходного напряжения от входVi -к,Up выходное напряжение-блока 13: гтрП К,,К2- коэффициенты пропорциональности; - входное напряжение блока 13, пропорциональное перепаду давлений в полостях силового гидроцилиндра привода. Указанная нелинейная зависимость может быть легко реализована путем кусочнолинейной аппроксимации на интегральных операционных усилителях и диодных цепочках. При уменьшении момента нагрузки сиг - нал датчика 9 давления, пройдя через нелинейный блок 13, уменьшает коэффициент
1033308, 34 .
передачи блока 14 умножения по второмуПрименение изобретения повып.ает точвходу, поддерживая неизменным общий коэф- ность и улучшает динамические характефициент передачи.ристики устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления дистанционным манипулятором | 1978 |
|
SU737917A2 |
| Устройство для управления дистанционным манипулятором | 1984 |
|
SU1168895A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1112341A2 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU883862A2 |
| Устройство для управления дистанционным манипулятором | 1983 |
|
SU1095129A2 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU950519A2 |
| Устройство для управления дистанционным манипулятором | 1977 |
|
SU639699A2 |
| Устройство для управления дистанционным манипулятором | 1988 |
|
SU1650428A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1061987A2 |
| Устройство для управления дистанционным манипулятором | 1985 |
|
SU1313692A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДИСТАНЦИОННЫМ МАНИПУЛЯТОРОМ по авт. св. СССР № 582960, отличающееся тем, что, с целью повышения точности и улучшения динамических характеристик устройства, введены последовательно соединенные нелинейный блок и блок умножения, через который выход первого сумматора подключен к входу усилителя, а вход нелинейного блока соединен с выходом датчика давления. (Л со со со о 00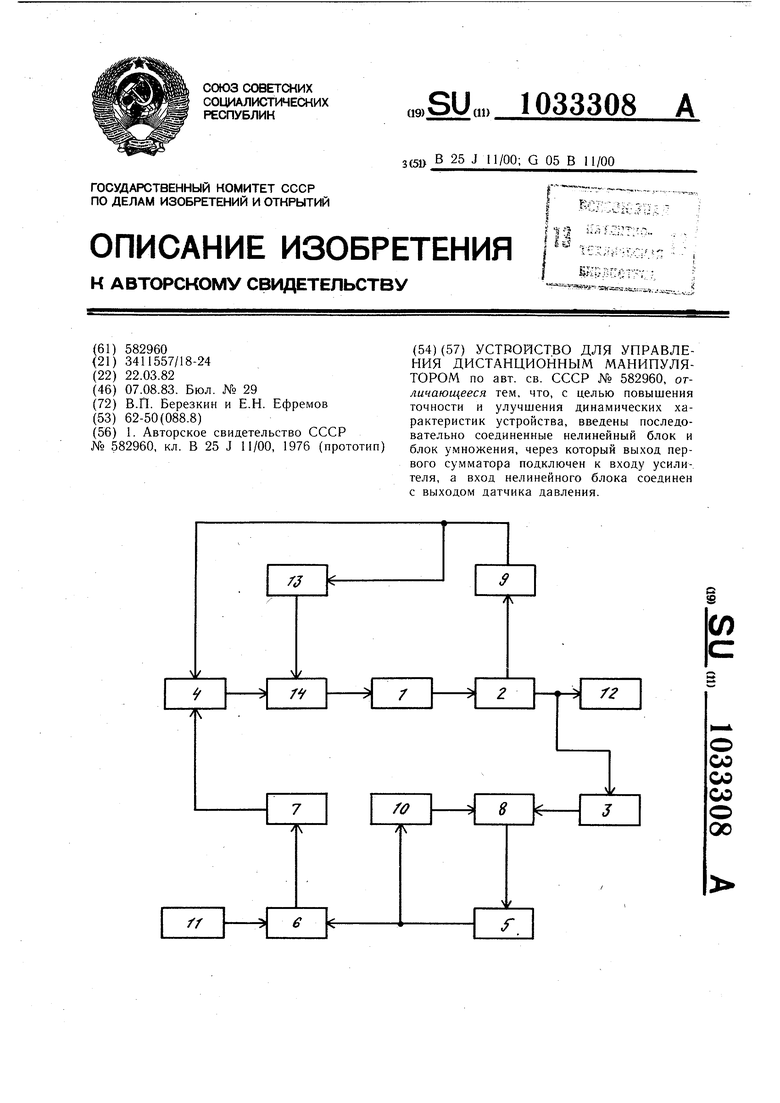
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для управления дистанционным манипулятором | 1976 |
|
SU582960A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
