Изобретение относится к робототехнике и может быть использовано при создании дистанционных манипуляторов.
Цель изобретения - повышение точности устройства путем уменьшения дрейфа угла выходного вала гидропривода, вызванного флуктуациями параметров электрогидроусилителя гидропривода.
На чертеже представлена функциональная схема предлагаемого устройства.
Устройство содержит датчик 1 угла задающего органа, датчик 2 угла исполнительного органа, задающий орган 3, исполнительный орган 4, упругий элемент 5, датчик 6 момента, первый сумматор 7, датчик 8 давления, второй сумматор 9, усилитель 10, электрогидроусилитель 11, электропривод 12, гидропривод 13, третий сумматор 14, пороговый элемент 15, цифроанало- говый преобразователь 16, аналого-цифровой преобразователь 17.
Устройство работает следующим образом.
При воздействии оператора со стороны задающего органа 3 на упругий элемент 5 сигнал с датчика 6 момента поступает на первый вход первого сумматора 7, на второй вход которого поступает сигнал с датчика 8 давления, пропорциональный моменту нагрузки на исполнительный орган 4. Если сигнал с выхода датчика 6 момента по абсолютной величине больше порогового значения настройки элемента 15, то на выходе последнего вырабатывается сигнал «1, под воздействием которого разреншется запись цифрового кода с выхода преобразователя 17 в преобразователь 16. Выходной сигнал с преобразователя 16 равен по величине и противоположен по знаку сигналу с датчика 2, т. е. взаимно компенсируется влияние выходных сигналов преобразователя 16 и датчика 2 на состояние третьего сумматора 14. Сигнал с выхода первого сумматора 7 поступает на третий сумматор 14, усилитель 10, электрогидроусилитель 11 и на гидропривод Ii3. В полостях гидропривода 13 создается перепад давлений, который вызывает поворот выходного вала гидропривода 13, связанного с исполнительным органом 4 со скоростью, пропорциональной разности моментов на задающем 3 и исполнительном 4 органах.
При движении исполнительного органа 4 сигнал с датчика 2 угла поступает на
аналого-цифровой преобразователь 17 и на первый вход второго сумматора 9, на второй вход которого поступает сигнал с датчика 1 угла. Разностный сигнал воздействует на
электропривод 12, который, в свою очередь, приводит в движение задающий орган 3, обеспечивая тем самым согласованные (копирующие) движения задающего и исполнительного органов 3 и 4.
Если сигнал с выхода датчика 6 .мо.мента меньще по абсолютной величине порогового значения настройки элемента 15, то на выходе, последнего вырабатывается сигнал «О, под действием которого запись цифрового кода в преобразователь 16 прекращается. Контур, образованный усилителем 10, электрогидроусилителем 11, гидроприводом 13, датчиком 2 угла и третьим сумматором 14, стабилизирует угол выходного вала гидропривода 13. Задающи.м воздействием контура является сум.ма сигнала с преобразователя 16 (неизменного во времени и пропорционального значению угла исполнительного органа 4 на момент появления сигнала «О на выходе элемента 15) и сигнала с датчика 6 момента. Здесь флуктуация
параметров электрогидроусилителя 11, гидропривода 13 не вызывает неограниченное и медленное «сползание рабочего органа манипулятора (например,захвата) относительно объекта. Оператор освобождается от ручной компенсации этого «сползания и выполнение пря.мой задачи позиционирования облегчается.
Формула изобретения
Устройство для управления дистанцион- ным манипулятором по авт. св. Ng 582960, отличающееся тем, что, с целью повышения точности устройства, оно содержит пороговый элемент, последовательно соединенные аналого-цифровой преобразователь и цифро- аналоговый преобразователь, а также третий сумматор, через который выход первого сумматора подключен к входу усилителя, выход датчика момента соединен через пороговый элемент с вторым входом цифроана- логового преобразователя, выход которого подключен к второму входу третьего сумматора, соединенного третьим входом с выходом датчика угла исполнительного органа и входом аналого-цифрового преобразователя.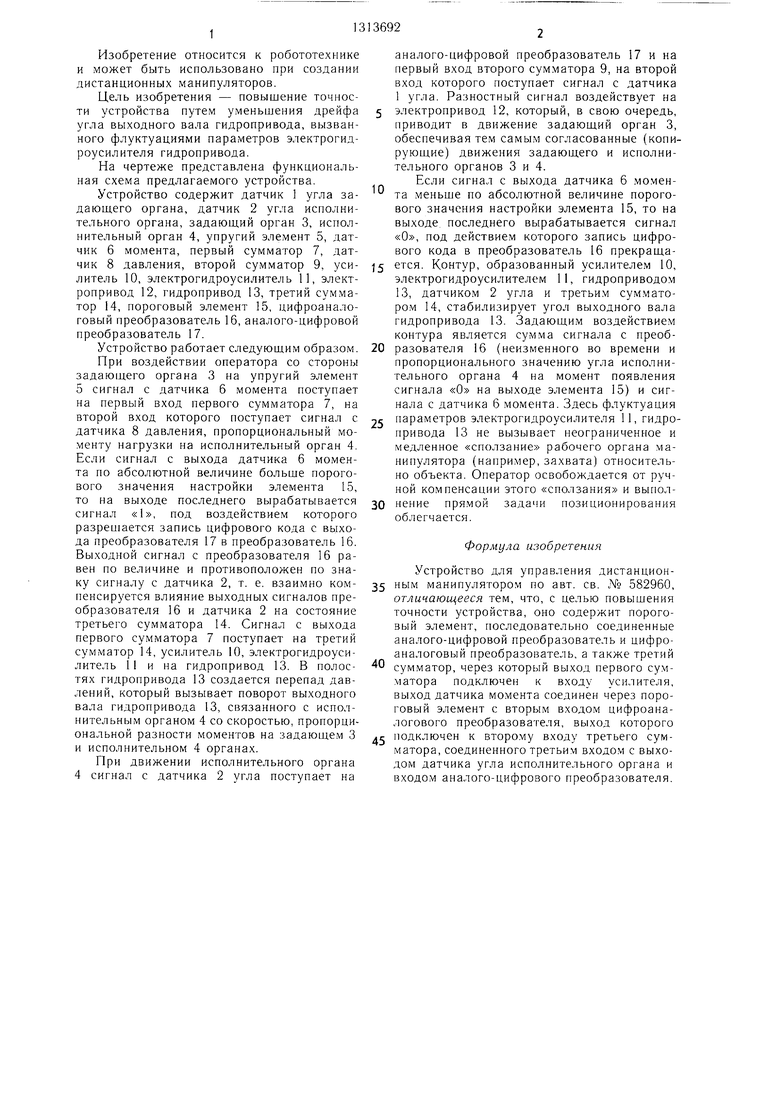
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления дистанционным манипулятором | 1977 |
|
SU639699A2 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU950519A2 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU883862A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1112341A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1061987A2 |
| Устройство для управления дистанционным манипулятором | 1984 |
|
SU1168895A2 |
| Устройство для управления дистанционным манипулятором | 1983 |
|
SU1095129A2 |
| Устройство для управления дистанционным манипулятором | 1988 |
|
SU1650428A2 |
| Устройство для управления дистанционным манипулятором | 1978 |
|
SU737917A2 |
| Устройство для управления дистанционным манипулятором | 1976 |
|
SU582960A1 |
Изобретение относится к робототе.хни- ке и может быть использовано при создании дистанционны.х манипуляторов. Цель изобретения - повышение точности работы, достигается путем уменьшения дрейфа угла выходного вала гидропривода за счет введения в устройство, содержаш,ее задающий и исполнительные органы, упругий элемент, гид- ро- и электропривод, датчики угла, давления и момента, сумматоры, порогового элемента, дополнительного сумматора, аналого-цифрового и цифроаналогового преобразователей. 1 ил. СО со Gi СО to N
| Устройство для управления дистанционным манипулятором | 1976 |
|
SU582960A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
